





专利摘要
本发明公开一种包含三种驱动机构的钻机结构,由进给驱动机构、旋转驱动机构、冲击驱动机构同时实现钻杆的进击、旋转与冲击;所述进给驱动机构安装于支架上,具有实现竖直运动的进给平台;旋转驱动机构安装于进给平台上;具有实现旋转运动的旋转套筒;冲击驱动机构安装在旋转驱动机构上部,具有实现竖直运动的气缸,气缸设置于旋转套筒内;气缸内具有活塞锤头;钻杆顶部同轴设置在套筒内,周向上具有与旋转套同底端配合的台肩。本发明的优点在于:可同时控制钻杆的进给运动、冲击运动和旋转运动。在对模拟月壤进行钻进的实验当中,可以高效实现对模拟月壤和月岩的切削和冲击。
权利要求
1.一种包含三种驱动机构的钻机结构,其特征在于:包括进给驱动机构、旋转驱动机构、冲击驱动机构,同时实现钻杆的进击、旋转与冲击;
所述进给驱动机构安装于支架上,具有实现竖直运动的进给平台;旋转驱动机构安装于进给平台上;具有实现旋转运动的旋转套筒;冲击驱动机构安装在旋转驱动机构上部,具有实现竖直运动的气缸,气缸设置于旋转套筒内;气缸内具有活塞锤头;钻杆顶部同轴设置在旋转套筒内,与旋转套筒间通过键和键槽配合相连;周向上具有与旋转套同底端配合的台肩。
2.如权利要求1所述一种包含三种驱动机构的钻机结构,其特征在于:所述进给驱动机构中,进击平台通过进给电机驱动进给滚珠丝杠,实现进给平台的竖直运动;进给电机安装于进给支架顶部,进给;进给支架上安装有直线导轨,竖直设置;进给滚珠丝杠与直线导轨平行设置,安装于进给支架上;直线导轨上安装有滑块,滑块与滑块安装板固连;进给平台套在丝杠上与丝杠螺母固定连接,且垂直于滑块安装板。
3.如权利要求1所述一种包含三种驱动机构的钻机结构,其特征在于:所述旋转驱动机构中,旋转套筒设置于进给平台上,轴线与进给平台垂直;旋转套筒上下两端分别通过与上盖板、进给平台相连;上盖板固定安装在滑块安装板上;旋转套筒的转动通过大齿轮与小齿轮传动实现;其中,大齿轮固定套接在旋转套筒上;小齿轮与大齿轮啮合,与旋转电机输出轴固定。
4.如权利要求3所述一种包含三种驱动机构的钻机结构,其特征在于:所述上盖板上还安装有微动限位开关,使微动限位开关与一个定位平台配合,实现进给电机的运行控制。
5.如权利要求1所述一种包含三种驱动机构的钻机结构,其特征在于:所述冲击驱动机构中,气缸在旋转套筒中的竖直运动,通过冲击电机驱动摆动轴承实现;摆动轴承的转子套在冲击轴上,摆动轴承的转子上下两端分别通过轴承与冲击轴承座、上盖板相连;冲击电机的输出轴与冲击轴固定;摆动轴承的摆杆的中心面与摆动轴承转子的中心面具有角度差;摆动轴承的摆杆通过插入气缸的气缸轴侧壁上开设的通孔与气缸相连。
6.如权利要求1所述一种包含三种驱动机构的钻机结构,其特征在于:所述钻杆上部套有滑环,用于引出钻杆内部传感器的信号线。
7.如权利要求1所述一种包含三种驱动机构的钻机结构,其特征在于:所述钻杆顶部套有缓冲弹簧,缓冲弹簧顶端与钻杆上的台肩接触,底端与吊装在进给平台上的限位法兰接触。
8.如权利要求7所述一种包含三种驱动机构的钻机结构,其特征在于:所述缓冲弹簧顶端周向上嵌入安装在一铜套侧壁开设的环形槽内;铜套固定套在钻杆上。
9.如权利要求1所述一种包含三种驱动机构的钻机结构,其特征在于:所述钻杆与旋转套筒间设置有弹性胶圈。
说明书
技术领域
本发明属于空间资源探测技术领域,涉及一种包含三种驱动机构的钻机结构。
背景技术
自从上世纪60年代前苏联开始尝试深空探测以来,外星球探测能力已经成为一个国家实力和科技水平的重要体现。美国和前苏联早在上世纪六七十年代已经成功实现月球土壤采样并返回,现如今,美国的“旅行者”1号已经飞出四万个地月距离,到达了太阳系的边缘;同时,日本的“隼鸟”号探测器成功的在小行星上采样并返回地球。我国的深空探测“嫦娥工程”才刚刚起步,根据我国的探月计划,月球探测工程分为“绕”、“落”、“回”三个战略阶段,目前正向第二个发展阶段迈进,探月二期要实现月球软着陆和月球车实地勘察,探月三期将要实现对月球样品的自动采集与返回。
地球上的资源是有限的,外星球的资源如果能够加以开发,将会成为地球资源重要的储备和支撑,因此对外星球进行取样且分析其成分,对人类社会能源的可持续发展具有重大意义。钻取式采样器是深空探测采样中最常选用的采样器形式,钻取式的采样方式既可以采集松散的表层样品,也可以进行深层采样,经过特殊的设计还可以进行坚硬的岩石的采样,使得可以采集的样品种类较多。在钻取采样的过程中,钻杆需要高速转动。
为了研究钻杆在钻进过程中的热特性,需要在地面上进行预先的实验。地面试验中,钻机要对模拟月壤和月岩进行切削和冲击。整个钻进过程中包含钻杆的竖直上下运动和钻杆的高速旋转运动。此外,考虑到月球上会存在一些坚硬的岩石,因此在实验的过程中,钻杆还需要拥有沿着竖直方向进行冲击运动的能力。传统的钻机功能有限,无法适应实验的要求,因此需要一种能够满足试验要求的钻机结构。
发明内容
针对上述问题,本发明提出一种包含三种驱动机构的钻机结构,可同时实现钻杆的三种运动,包括钻杆的进给,旋转与冲击;使钻杆可在进给的同时实现冲击和旋转。
本发明钻机结构,由进给驱动机构、旋转驱动机构、冲击驱动机构,同时实现钻杆的进击、旋转与冲击。
所述进给驱动机构安装于支架上,具有实现竖直运动的进给平台;进击平台通过进给电机驱动进给滚珠丝杠,实现进给平台的竖直运动;进给电机安装于进给支架顶部,进给;进给支架上安装有直线导轨,竖直设置;进给滚珠丝杠与直线导轨平行设置,安装于进给支架上;直线导轨上安装有滑块,滑块与滑块安装板固连;进给平台套在丝杠上与丝杠螺母固定连接,且垂直于滑块安装板。
所述旋转驱动机构安装于进给平台上,具有实现旋转运动的旋转套筒;旋转套筒设置于进给平台上,轴线与进给平台垂直;旋转套筒上下两端分别通过与上盖板、进给平台相连;上盖板固定安装在滑块安装板上;旋转套筒的转动通过大齿轮与小齿轮传动实现;其中,大齿轮固定套接在旋转套筒上;小齿轮与大齿轮啮合,与旋转电机输出轴固定;
所述冲击驱动机构安装在旋转驱动机构上部,具有实现竖直运动的气缸,气缸设置于旋转套筒内;气缸内具有活塞锤头。气缸在旋转套筒中的竖直运动,通过冲击电机驱动摆动轴承实现;摆动轴承的转子套在冲击轴上,摆动轴承的转子上下两端分别通过轴承与冲击轴承座、上盖板相连;冲击电机的输出轴与冲击轴固定;摆动轴承的摆杆的中心面与摆动轴承转子的中心面具有角度差;摆动轴承的摆杆通过插入气缸的气缸轴侧壁上开设的通孔与气缸相连。
所述钻杆顶部同轴设置在旋转套筒内,与旋转套筒间通过键和键槽配合相连;周向上具有与旋转套同底端配合的台肩。
本发明的优点在于:
1、本发明包含三种驱动机构的钻机结构,可分别实现不同的运动方式,可针对不同的钻进样品进行试验,适应性广;
2、本发明包含三种驱动机构的钻机结构中,三种驱动组件的分布合理,空间配合比较紧凑,从而使得钻机的结构相对简洁;
3、本发明包含三种驱动机构的钻机结构中,冲击驱动组件虽然使钻杆进行冲击运动,但是冲击机构是以空气作为活塞锤头和气缸的中间介质,两者形成弹性结合,因而减小了对冲击机构的有害作用,具有结构简单、使用寿命长、加工方便等优点;
4、本发明包含三种驱动机构的钻机结构中,钻机的钻杆由光轴段和螺旋段构成,使得钻头的更换比较简单,同时光轴段还能够很好的与其它组件配合,保证密封性。
附图说明
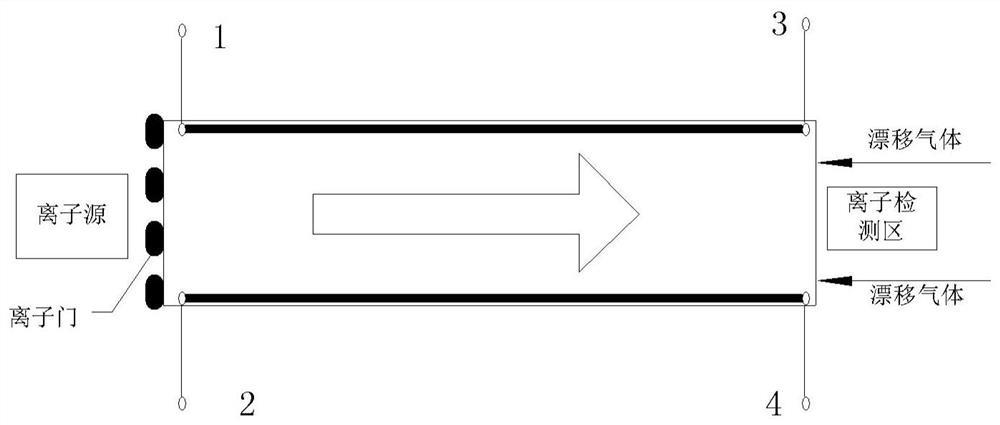
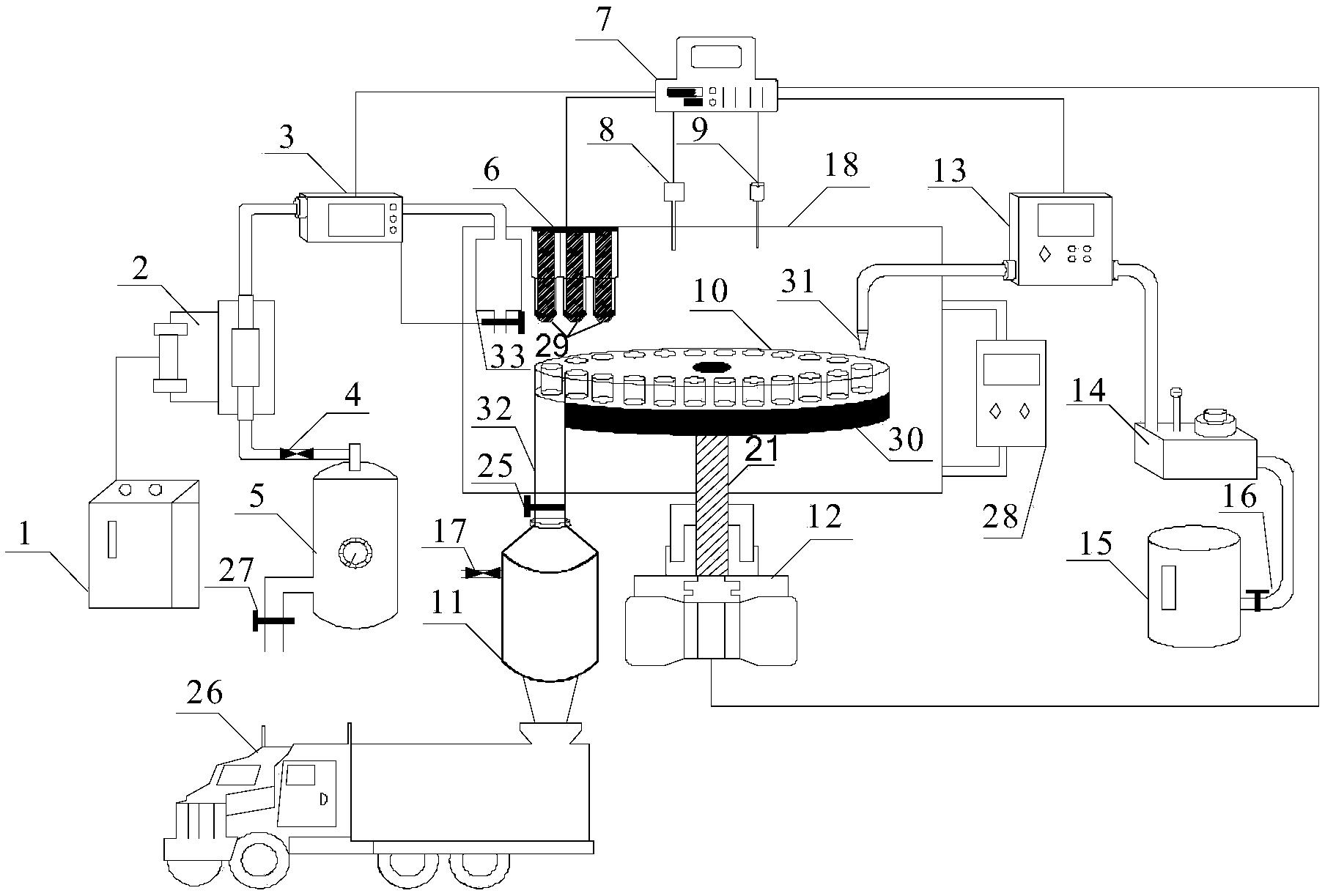
图1为本发明钻机整体结构原理图;
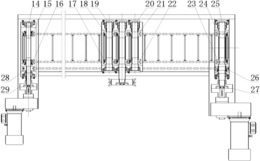
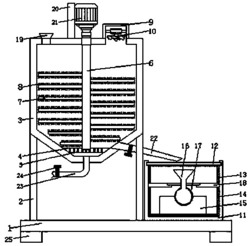
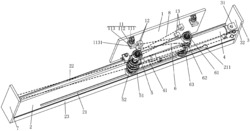
图2为本发明钻机整体结构示意图;
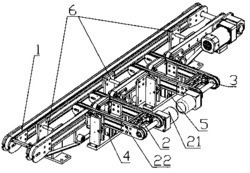
图3为本发明钻机的进给驱动机构中进给驱动组件结构示意图;
图4为本发明钻机的旋转驱动机构中内部齿轮传动结构示意图;
图5为本发明钻机的旋转驱动机构封装后结构示意图;
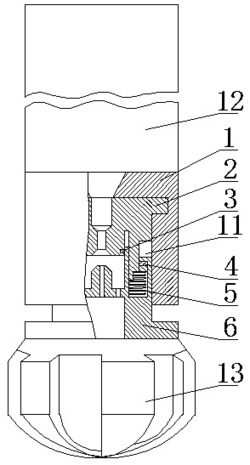
图6为本发明钻机的旋转驱动机构局部剖视示意图;
图7为本发明钻机的冲击驱动机构结构示意图;
图8为本发明钻机的冲击驱动机构局部剖视示意图;
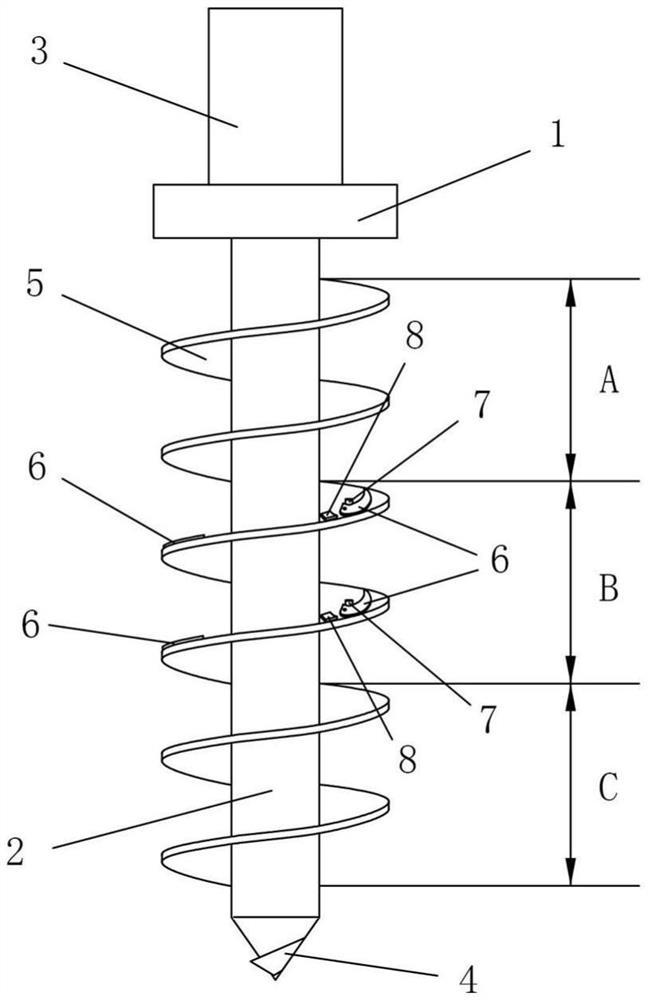
图9为本发明钻机的钻杆组件结构示意图。
图中:
1-进给驱动机构 2-冲击驱动机构 3-旋转驱动机构
4-钻杆组件 101-进给支架 101a-定位上平台
101b-定位下平台 102a-直线导轨 102b-进给滚珠丝杠
102c-滑块 102d-进给电机 102e-滑块安装板
102f-进给平台 102g-联轴器保护套 201-旋转电机
202-旋转电机减速器 203-小齿轮 204-大齿轮
205-旋转套筒 206-旋转轴承定位端盖 207-上盖板
208-钻杆套筒 209-大齿轮下套筒 210-大齿轮下套筒
211-挡板 301-冲击电机 302-冲击电机安装板
303-冲击轴承座组件 304-冲击轴 305-摆动轴承
306-气缸 306a-活塞锤头 401-钻杆光轴上段
402-钻杆光轴中段 403-钻杆光轴下段 404-滑环定位支座
405-滑环 406-钻杆接头 407-钻杆螺旋段
408-钻头 409-限位法兰 410-定位件
411-缓冲弹簧 412-限位台肩
具体实施方式
下面将结合附图和实施例对本发明作进一步的详细说明。
本发明钻机结构包括进给驱动机构1、旋转驱动机构2、冲击驱动机构3以及钻杆组件4,如图1、图2所示。
所述进给驱动机构1用来实现钻杆组件4的轴向进给运动,包括进给支架101与进给驱动组件102,如图3所示,进给驱动组件102固定安装在进给支架101上,保持位置不变;结合附图4所示,进给驱动组件102包括直线导轨102a、进给滚珠丝杠102b、滑块102c、进给电机102d、滑块安装板102e、进给平台102f、定位上平台102g与定位下平台102h,如图2所示。其中,直线导轨102a为两条,均竖直设置,安装在进给支架1侧面上。进给滚珠丝杠102b中的丝杠与两条直线导轨平行设置,两端分别通过滚动轴承A与安装在进给支架1上部和下部的定位上平台102g、定位下平台102h相连,且两端的滚动轴承A通过轴承座安装于定位上平台102g、定位下平台102h上;且丝杠顶端通过锁紧螺母实现丝杠和滚动轴承A间精确紧固,锁紧螺母穿过由轴承座底端与滚动轴承的内圈接触。丝杠顶端通过联轴器与进给电机102d输出轴同轴连接,且在联轴器外套有联轴器保护套102g,并将联轴器保护套102g两端分别固定在定位上平台102g与进给电机102d外壳上,通过联轴器保护套102g对联轴器进行保护,同时实现对进给电机102d的支撑。上述每条直线导轨102a上安装有两个相同的滑块102c,滑块102c与滑块安装板102e固定连接,使滑块安装板102e可在直线导轨102a上沿着竖直方向滑动;且使四个滑块102c分别位于滑块安装板102e的四角处,由此保证滑块安装板102e在竖直方向上运动时不发生偏移。进给平台102f套在丝杠上与丝杠螺母固定连接,且垂直于滑块安装板102e,由此,通过进给电机102d驱动丝杠转动,由螺母带动进给平台102f沿丝杠在竖直方向上运动。
所述旋转驱动机构2用于实现钻杆组件4周向上的旋转运动,安装在进给驱动机构1中的进给平台102f上,包括旋转电机201、旋转电机减速器202、小齿轮203、大齿轮204、旋转套筒205、旋转轴承定位端盖206、上盖板207与钻杆套筒208,如图4、图5、图6所示。
其中,旋转电机201输出轴与旋转电机减速器202固连,旋转电机减速器202固定安装在进给平台102f下表面。旋转电机减速器202的输出轴穿过进给平台102f后与小齿轮203通过键配合同轴固连,并通过紧定螺钉实现小齿轮203的定位。大齿轮204与小齿轮203啮合,套在旋转套筒205上,通过键配合与旋转套筒205固定。旋转套筒205顶端通过滚动轴承B安装在旋转轴承定位端盖206内;旋转轴承定位端盖206固定安装在上盖板207下表面,上盖板与进给平台102f平行设置,固定安装在滑块安装板102e上。旋转套筒205底端穿过进给平台102f与钻杆套筒208间通过滚动轴承C同轴相连;钻杆套筒208固定安装在进给平台102f上。由此,通过旋转电机201驱动小齿轮与大齿轮间传动,最终实现旋转套筒205的旋转运动;且通过滚动轴承B与滚动轴承C,保证旋转套筒208的旋转运动。上述旋转套筒205上套有大齿轮上套筒209与大齿轮下套筒210;大齿轮上套筒209位于大齿轮204与旋转轴承定位端盖206之间,大齿轮下套筒210位于大齿轮204与滚动轴承C的轴承内圈间;通过大齿轮上套筒209与大齿轮下套筒210实现大齿轮204轴向上的定位。上述小齿轮203与大齿轮204通过周向上的挡板211进行保护,档板211上下边缘分别与上盖板207和进给平台102f固定;左右侧边分别固定与滑块安装板102e左右侧边固定。由此,通过上盖板207、进给平台102f、滑块安装板102e以及挡板211共同构成齿轮箱结构,将小齿轮203与大齿轮204密封。在上述进给驱动机构1的驱动下,可带动整个旋转驱动机构2沿丝杠在竖直方向上运动。本发明中在上盖板207上还安装有一个微动限位开关,用来实现旋转驱动机构2竖直向上运动的限位,当微动限位开关与定位上平台102g接触时,微动限位开关触发,向外部控制系统发送停止信号,由外部控制系统控制进给驱动机构1进给运动停止。
所述冲击驱动机构3安装在旋转驱动机构2的上盖板207上,用于为钻杆组件4在钻进过程中提供冲击力,包括冲击电机301、冲击电机安装板302、冲击轴承座组件303、冲击轴304、摆动轴承305与气缸306,如图7、图8所示。
其中,冲击电机301固定安装在冲击电机安装板302上,冲击电机安装板302固定安装在冲击轴承座303上,冲击轴承座固定安装在旋转驱动机构2中的上盖板207上表面。冲击轴304上端通过键与冲击电机301的输出轴同轴固连,冲击轴下端安装有摆动轴承305,摆动轴承305的转子套在冲击轴304下端,通过花键配合,与冲击轴304下端固定。由此,通过冲击电机301驱动冲击轴304转动,可带动摆动轴承305的转子一起转动。摆动轴承305的转子上端与冲击轴承座303间通过滚动轴承D相连,便于摆动轴承305的转子转动;摆动轴承305的转子下端与旋转驱动机构2中的上盖板207间也安装有一个滚动轴承E,滚动轴承E内圈与冲击轴304末端紧配合,外圈与旋转驱动机构2中的上盖板207配合固定;摆动轴承305的转子下端端部与滚动轴承E内圈之间环套连接,避免摆动轴承305的转子下端端部与滚动轴承E外圈间的摩擦,且通过滚动轴承E还可防止摆动轴承305的转子径向跳动。摆动轴承305的摆杆的中心面与摆动轴承转子的中心面有15°的角度差,由此摆动轴承305的转子转动时,可实现摆动轴承305的摆杆在竖直方向上的往复运动。摆动轴承305的摆杆通过插入气缸306的气缸轴侧壁上开设的通孔与气缸306相连,气缸306同轴设置在旋转驱动机构2中的旋转套筒205内。由此,通过摆动轴承305的摆杆可带动气缸306沿着竖直方向上在旋转套筒205内往复运动。所述气缸306的缸体内具有活塞锤头306a,用来向钻杆组件4施加冲击力;活塞锤头306a周向上与气缸306的缸体内壁间通过橡胶圈进行密封。由此,当摆动轴承305的摆杆带动气缸306在旋转套筒205内向下运动时,压缩气缸306内的空气,进而推动活塞锤头306a向下做冲击运动,冲击钻杆组件;当摆动轴承305的摆杆带动气缸306在旋转套筒45内向上运动时,带动活塞锤头306a向上运动,为下次冲击做好准备。
所述钻杆组件4与旋转驱动机构2相连,包括钻杆光轴上段401、钻杆光轴中段402、钻杆光轴下段403、滑环定位支座404、滑环405、钻杆接头406、钻杆螺旋段407、钻头408与限位法兰409,如图9所示。
其中,钻杆光轴上段401、钻杆光轴中段402、钻杆光轴下段403、钻杆螺旋段407与钻头408共同构成钻杆。钻杆光轴上段401底端与钻杆光轴中段402顶端间通过螺纹配合同轴固定;钻杆光轴中段402底端与钻杆光轴下段403顶端同样通过螺纹配合同轴固定。钻杆光轴下段403底端和钻杆接头406间螺纹配合同轴固定;钻杆接头406用来连接钻杆螺旋段407,钻杆螺旋段407顶端与钻杆接头406通过螺钉配合同轴固定;钻杆螺旋段407的底端螺纹配合固定安装有可更换的钻头408。上述钻杆光轴上段401上部穿过旋转机构2中钻杆套筒208后,同轴设置于旋转套筒205内。钻杆光轴上段401上部相对两侧沿钻杆光轴上段401周向设计有键,旋转套筒205内壁周向上设计有键槽,通过键与键槽间配合,实现钻杆与旋转套筒205间的周向定位,并使钻杆可沿旋转套筒205轴向往复运动,并可随旋转套筒205一同旋转运动。钻杆光轴上段401外壁周向上设计有限位台肩412,如图6所示,通过限位台肩412与旋转套筒205底端配合接触,实现钻杆与旋转套筒205间的限位。钻杆光轴上段401顶部还套有弹性胶圈,弹性胶圈与旋转套筒内壁接触定位,减小了冲击运动对钻杆的硬性冲击,起到了一定的缓冲作用。所述滑环405套接在钻杆光轴上段401,用于引出钻杆组件4内部各传感器的信号线。滑环405底端与钻杆光轴上段401固定;顶端设计有具有U型槽的定位件410,U型槽与L型滑环定位支座404的定位端配合,使滑环定位支座404的定位端插入U型槽内,L型滑环定位支座404的固定端固定安装在限位法兰409底面,限位法兰409套接在旋转驱动机构2中钻杆套筒208底端,使限位法兰409可自由转动。如图6所示,限位法兰409与钻杆套筒208间的具体安装方式为:限位法兰409为由两个半圆固定相接形成的整体环形结构,限位法兰409内部周向上设计有台肩,同时在套筒208底端周向上设计有凹槽,将台肩嵌入凹槽内,实现限位法兰与套筒间的定位,且可使限位法兰409自由转动。由此,通过上述结构可使滑环405能够与钻杆同步旋转。
本发明包含三种驱动机构的钻机结构,在工作时,可同时实现钻杆的三种运动,包括钻杆的进给,旋转与冲击,使钻杆可在进给的同时实现冲击和旋转。对于进给运动,通过控制进给驱动机构1中进给电机102d驱动进给平台102f向下运动,带动旋转驱动机构2一并向下运动,由此,通过旋转套筒205底端端面下压钻杆光轴上段401上的限位台肩412,实现钻杆向下的进给运动。对于旋转运动,通过控制旋转控制机构2中的旋转电机201驱动小齿轮203与大齿轮204间传动,带动旋转套筒205旋转,进而带动钻杆与旋转套筒205一并旋转。对于冲击运动,通过控制冲击驱动机构3中冲击电机301驱动冲击轴304与摆动轴承305的转子一起转动,使摆动轴承305的摆杆上下往复运动,进而推动活塞锤头306a以较高的冲击频率往复运动冲击钻杆光轴上段401顶端端面。
如图6所示,本发明中还在钻杆光轴上段401上套有缓冲弹簧411,使缓冲弹簧411两端分别与限位法兰409和钻杆光轴上段401上的限位台肩412接触,通过缓冲弹簧411减小了冲击运动对钻杆的硬性冲击。为了防止钻杆在旋转过程中,缓冲弹簧411不随之旋转,因此在钻杆上套有一个铜套413,铜套413紧配合与钻杆固定,位于缓冲弹簧411与钻杆光轴上段401的限位台肩412与缓冲弹簧411之间。在铜套413外壁周向上开有凹槽,将缓冲弹簧411顶端卡在凹槽内。由此,在钻杆旋转过程中,通过铜套413带动缓冲弹簧411与钻杆一并旋转。
本发明中所有滑动接触部件的表面均镀有二硫化钼膜,利于滑动的顺畅性,防止卡死现象的发生。
一种包含三种驱动机构的钻机结构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0