








专利摘要
本发明公开了一种具有力伺服功能的微加工刀架,所述微加工刀架包括PZT促动器、第一位移传感器、第二位移传感器、丝杆、螺母、旋转环、柔性铰链、探针、导向支架和XY位移平台。本发明利用柔性铰链,将对法向力的测量转为对柔性铰链法向变形量的测量,对位移的测量更简单,更精确;采用环形中心对称柔性铰链,可以有效抵抗侧向力产生的变形,使探针与XY平面尽可能保持垂直,减小偏转角度;利用旋转环配合紧钉螺钉可以调节探针的角度,实现不同角度的微机械加工;通过更换柔性铰链可以改变最大载荷,以适用于加工不同硬度的工件;通过丝杆螺母可以调节第二位移传感器与柔性铰链的间距,便于确定初始间距,方便测量。
权利要求
1.一种具有力伺服功能的微加工刀架,其特征在于所述微加工刀架包括PZT促动器、第一位移传感器、第二位移传感器、丝杆、螺母、旋转环、柔性铰链、探针、导向支架和XY位移平台,其中:
所述导向支架为倒“T”型,由水平支架和竖直支架构成,所述竖直支架的中部右侧设有水平分支架;
所述XY位移平台的工作面朝下;
所述PZT促动器的固定端安装在所述XY位移平台的工作面上,运动端与所述水平支架的左侧上表面连接;
所述第一位移传感器安装在所述XY位移平台的工作面上,且位于所述竖直支架的正上方;
所述丝杆安装在水平分支架上;
所述螺母安装在所述丝杆上,且位于水平分支架的下方;
所述第二位移传感器安装在所述螺母上;
所述旋转环安装在所述水平支架的右侧,由紧钉螺钉固定;
所述柔性铰链安装于所述旋转环的下方,两者同心;
所述探针安装在所述柔性铰链中心下方。
2.根据权利要求1所述的具有力伺服功能的微加工刀架,其特征在于所述柔性铰链为环形中心对称柔性铰链。
说明书
技术领域
本发明涉及一种微机械加工刀架,尤其涉及一种具有力伺服功能的微机械加工刀架。
背景技术
随着纳米技术的发展,特别是原子力显微镜(Atomic Force Microscope,AFM)的发明,人们发现机械加工方法在纳米结构的加工中仍然具有不可估量的潜力。纳米机械加工是传统机械加工的延伸,这种方法中微纳米尺寸的探针取代了传统的机械切削工具,利用针尖与样品之间的相互作用力,在样品表面刮擦、压痕、提拉或推挤材料而产生微纳米结构。采用力伺服控制的加工方式的纳米机械加工方法具有突出的优点:能够实现较为精确的“对刀”;工件不需要进行严格的调平;对工件表面具有“跟随”效果,特别适合于在曲面和斜面上加工纳米结构。
目前,原子力显微镜(AFM)是常用的纳米机械加工设备,其特点是加工精度高、加工与检测集成;可以在金属、半导体、聚合物等多种材料表面加工出纳米点、纳米线/沟槽等结构。但AFM作为一种在原子水平测量和评价表面的系统,通过针尖施加到工件表面的作用力非常小,使得加工能力和工件材料受到限制,并且加工效率较低、范围较小、仪器成本高,还远不能满足目前微纳结构的加工需求。
发明内容
为了解决上述不足,本发明提供了一种具有高载荷、低成本优点的具有力伺服功能的微加工刀架。
本发明的目的是通过以下技术方案实现的:
一种具有力伺服功能的微加工刀架,包括PZT促动器、第一位移传感器、第二位移传感器、丝杆、螺母、旋转环、柔性铰链、探针、导向支架和XY位移平台,其中:
所述导向支架为倒“T”型,由水平支架和竖直支架构成,所述竖直支架的中部右侧设有水平分支架;
所述XY位移平台的工作面朝下;
所述PZT促动器的固定端安装在所述XY位移平台的工作面上,运动端与所述水平支架的左侧上表面连接;
所述第一位移传感器安装在所述XY位移平台的工作面上,且位于所述竖直支架的正上方;
所述丝杆安装在水平分支架上;
所述螺母安装在所述丝杆上,且位于水平分支架的下方;
所述第二位移传感器安装在所述螺母上;
所述旋转环安装在所述水平支架的右侧,由紧钉螺钉固定;
所述柔性铰链安装于所述旋转环的下方,两者同心;
所述探针安装在所述柔性铰链中心下方。
本发明具有如下优点:
1、本发明利用柔性铰链,将对法向力的测量转为对柔性铰链法向变形量的测量,对位移的测量更简单,更精确。
2、如图2所示,本发明采用环形中心对称柔性铰链,可以有效抵抗侧向力产生的变形,使探针与XY平面尽可能保持垂直,减小偏转角度。
3、如3图所示,本发明利用旋转环配合紧钉螺钉可以调节探针的角度,旋转环可带动柔性铰链和探针一起绕轴线旋转,调整好角度后用紧钉螺钉锁紧,实现不同角度的微机械加工。
4、本发明通过更换柔性铰链可以改变最大载荷,以适用于加工不同硬度的工件。
5、本发明通过丝杆螺母可以调节第二位移传感器与柔性铰链的间距,便于确定初始间距,方便测量。
6、本发明的刀架具有力伺服功能,可以在平面、斜面和曲面上加工出微纳米尺度的压痕、划痕等。
7、本发明的刀架可以控制法向力大小从微牛到数毫牛量级,可以实现较高硬度材料的加工,比商用AFM系统具有更强的加工能力和更广的适应性。
8、本发明的刀架利用XY位移平台可以实现较大范围的微机械加工。
9、本发明的刀架在加工过程中,可以同时测量加工的深度和相应的法向力。
附图说明
图1为具有力伺服功能的微机械加工刀架的原理图,图中:1-第一位移传感器、2-丝杆、3-螺母、4-第二位移传感器、5-柔性铰链、6-旋转环、7-紧钉螺钉、8-导向支架、9-探针、10-PZT促动器、11-XY位移平台;
图2为柔性铰链的结构示意图;
图3为探针角度调整方法的示意图;
图4为具有力伺服功能的微机械加工刀架的控制系统原理图,图中:12-显示器、13-主控计算机、14-运动控制系统、15-信号采集系统、16-PZT促动器驱动器、17-XY位移平台驱动器;
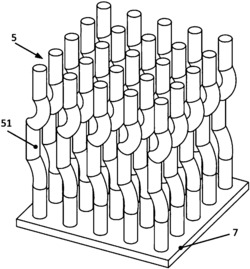
图5为具有力伺服功能的微机械加工刀架的立体图;
图6为具有力伺服功能的微机械加工刀架的主视图;
图7为图6局部剖面A的放大图;
图8为图6的B-B剖视图。
具体实施方式
下面结合附图对本发明的技术方案作进一步的说明,但并不局限于此,凡是对本发明技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,均应涵盖在本发明的保护范围中。
本发明提供的具有力伺服功能的微加工刀架包括机械系统和控制系统两部分。
如图1、5-8所示,所述机械系统包括PZT促动器10、第一位移传感器1、第二位移传感器4、丝杆2、螺母3、旋转环6、柔性铰链5、探针9、导向支架8和XY位移平台11。其中:
所述导向支架8为倒“T”型,由水平支架和竖直支架构成,所述竖直支架的中部右侧设有水平分支架;
所述XY位移平台11的工作面朝下;
所述PZT促动器10的固定端安装在XY位移平台11的工作面上,运动端与所述水平支架的左侧上表面连接,可以带动所述导向支架8上下运动;
所述第一位移传感器1安装在所述XY位移平台11的工作面上,且位于所述竖直支架的正上方,与所述竖直支架的间距为l1;
所述探针9安装在所述柔性铰链5中心下方;
所述柔性铰链5的安装于旋转环6下方,两者同心,所述旋转环6安装在所述水平支架的右侧,通过紧钉螺钉7进行固定,可以带动柔性铰链5绕轴线旋转,从而调节探针9的角度;
所述丝杆2安装在水平分支架上;
所述螺母3安装在所述丝杆2上,且位于所述水平分支架的下方;
所述第二位移传感器4安装在所述螺母3上,所述螺母3可以通过所述丝杆2上下运动,从而调节所述第二位移传感器4与所述柔性铰链5的间距l2。
如图4所示,所述控制系统包括主控计算机13、运动控制系统14和信号采集系统15三大部分。控制信号具体包括:PZT促动器的驱动信号、XY位移平台的驱动信号、第一位移传感器1和第二位移传感器4的测量信号。通过运动控制系统、两个D/A模块、PZT促动器驱动器16和XY位移平台驱动器17实现PZT促动器10和XY位移平台11的运动控制。通过信号采集系统15、两个A/D模块、第一位移传感器1和第二位移传感器4实现PZT促动器10输出位移和柔性铰链5法向变形量的测量。由主控计算机13的软件进行数据处理,并实时给出深度-法向力曲线。
工作原理:
以探针9针尖刚好接触到工件表面无接触力时为初始位置。
加载过程,PZT促动器10增大输出位移使导向支架8向下运动,∆l1即为导向支架8的位移量即PZT促动器10的输出位移。导向支架8带动探针9向下运动;当探针9压入工件时,柔性铰链5受到向上的法向力使其向上变形,与第二位移传感器4的间距l2减小,所以∆l2为柔性铰链5的法向变形量。PZT促动器10的输出位移与柔性铰链5的法向变形量的差值(∆l1-∆l2)为探针9压入工件的深度。柔性铰链5的法向变形量与所受的法向力具有一定的线性关系,从而可以计算出探针9所受的法向力。
卸载过程,PZT促动器10减小输出位移使导向支架8向上运动,柔性铰链5受到的法向变形逐渐恢复,法向力逐渐减小,最终探针9脱离工件。
在加工过程中,可以同时测量加工的深度和相应的法向力。利用XY位移平台11则可以在工件的特定位置和较大范围进行微纳尺度压痕、划痕等的加工。
一种具有力伺服功能的微机械加工刀架专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。




















动态评分
0.0