








专利摘要
本实用新型公开一种空间仿生柔性捕获装置及其地面试验试验系统,包括捕获组件、传动组件、驱动组件;捕获组件包括中心刚体、捕获网与质量块,中心刚体连接在捕获网的中心位置,质量块的数量为多个且沿间隔设在捕获网的边缘位置;传动组件包括传动轴,传动轴的一端与驱动组件传动相连,中心刚体、质量块吸附连接在传动轴的另一端,以使得中心刚体、质量块在传动轴旋转过程中脱落并使捕获网在旋转离心力的作用下展开释放。通过将中心刚体、质量块吸附连接在传动轴上,使得中心刚体、质量块在传动轴旋转过程中脱落并使捕获网在旋转离心力的作用下展开释放,进而有效的解决了网体展开过程中的缠绕问题以及构成保持问题。
权利要求
1.一种空间仿生柔性捕获装置,其特征在于,包括捕获组件、传动组件、驱动组件;
所述捕获组件包括中心刚体、捕获网与质量块,所述中心刚体连接在捕获网的中心位置,所述质量块的数量为多个且沿间隔设在捕获网的边缘位置;
所述传动组件包括传动轴,所述传动轴的一端与驱动组件传动相连,所述中心刚体、质量块吸附连接在传动轴的另一端,以使得中心刚体、质量块在传动轴旋转过程中脱落并使捕获网在旋转离心力的作用下展开释放。
2.根据权利要求1所述空间仿生柔性捕获装置,其特征在于,所述捕获网为仿生柔性网;
所述仿生柔性网包括若干呈放射状分布的第一捕获索,每相邻的两个第一捕获索之间通过若干间隔的第二捕获索相连以使得仿生柔性网构成蜘蛛网结构;
各第一捕获索朝内的一端均连接在中心刚体上并构成环形结构,所述质量块的数量与第一捕获索相对应,所述质量块连接在对应第一捕获索的另一端,所述第一捕获索与第二捕获索均由柔性材料制成。
3.根据权利要求1所述空间仿生柔性捕获装置,其特征在于,所述传动轴上对应捕获网的一端设有托盘,所述中心刚体吸附连接在传动轴的端部,所述质量块吸附连接在托盘内,所述捕获网盘绕在托盘内。
4.根据权利要求1所述空间仿生柔性捕获装置,其特征在于,还包括动力组件,所述驱动组件与动力组件电联,所述传动轴由电磁铁材料制成,所述传动轴上转动连接有导电滑环,所述传动轴通过导电滑环与动力组件电联,所述质量块与中心刚体均通过磁力吸附在传动轴上。
5.根据权利要求1所述空间仿生柔性捕获装置,其特征在于,还包括吸附组件,所述吸附组件包括若干环绕在传动轴周围的电磁铁,各电磁铁均与动力组件电联。
6.根据权利要求5所述空间仿生柔性捕获装置,其特征在于,还包括支架组件,所述支架组件包括依次相连的安装架、连接筒与收纳桶,所述连接筒两端开口,所述收纳桶一端开口,另一端设有连通孔;
所述驱动组件设在安装架上,所述吸附组件位于收纳桶内,所述传动轴的一端位于安装架上并与驱动组件传动相连,所述传动轴的另一端穿过连接筒、连通孔后位于收纳桶内靠近收纳桶开口的位置。
7.根据权利要求6所述空间仿生柔性捕获装置,其特征在于,所述传动组件还包括设在连接筒内的轴承座、轴用卡簧与轴承,所述轴承座固定连接在连接筒,所述轴承套设在连接轴上并与轴承座转到相连,所述轴用卡簧套设在连接轴上并与轴承相贴以防止轴承轴向窜动。
8.一种空间仿生柔性捕获装置地面试验系统,其特征在于,包括试验架、目标平台、摄像装置、数据采集装置与权利要求1至7任一项所述的空间仿生柔性捕获装置;
所述目标平台设在试验架的下方,所述空间仿生柔性捕获装置设在试验架上且具有捕获组件的一端朝向目标平台;
所述目标平台与空间仿生柔性捕获装置之间的空间位于摄像装置的拍摄视场内,所述数据采集装置与摄像装置电联。
9.根据权利要求8所述空间仿生柔性捕获装置地面试验系统,其特征在于,还包括光源,所述目标平台与空间仿生柔性捕获装置之间的空间位于光源的光路上。
10.根据权利要求8所述空间仿生柔性捕获装置地面试验系统,其特征在于,所述摄像装置为高速摄像机。
说明书
技术领域
本实用新型涉及航天技术领域,具体是一种空间仿生柔性捕获装置及其地面试验系统。
背景技术
空间柔性绳网捕获技术是通过绳网捕获装置平台向空间目标体方向展开一张由高强轻质纤维材料编织而成的大网,与目标碰撞后绳网将其包裹,通过收口机构收紧网口完成捕获,是一种新型空间在轨操作方式。此方式可以适用于抓捕不同形状和尺寸的空间目标体,具有通用性强、容错性高及耗能少等优势。
近年来,各国航天领域的研究学者对柔性绳网捕获技术进行了深入全面的研究。目前,国外的空间柔性绳网结构已经进入在轨验证阶段,欧洲空间局在2001年提出的机器人地球静止轨道恢复(Robotic Geostationary Orbit Restorer,ROGER)项目,设想使用绳网来捕获地球静止轨道废弃卫星。2012 年,由ESA资助的学生试验装置Suaineadh,搭载探空火箭REXUS 12升空,用于验证利用旋转部件展开空间绳网技术的可行性,但可能由于探测火箭姿态翻滚,试验装置通讯系统中断导致试验失败。据美国c4isrnet网站在2019 年2月17日发布的消息称,部署在国际空间站的欧盟碎片清理卫星(Remove DEBRIS)成功完成了“鱼叉”穿刺演示试验并捕获了太空垃圾,证明了利用柔性绳网捕获空间碎片方案的可行性。国内在空间柔性绳网结构领域的研究起步相对较晚,目前相关研究工作尚处于工程模型和地面验证阶段,哈尔滨工业大学、清华大学、北京航空航天大学等都开展了相关研究,具体包括柔性网捕获系统总体方案设计、质量块牵引抛射展开方式动力学建模与特性分析以及开展了相关地面验证试验等。
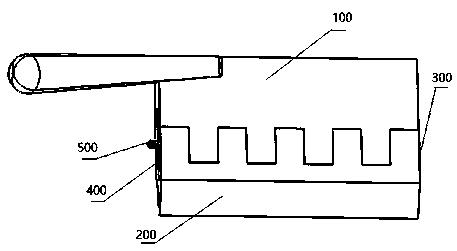
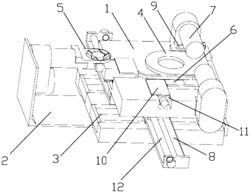
传统柔性网捕获系统结构为“柔性网+质量块+系绳+网体弹射装置”,其工作方式是通过弹射装置将质量块弹出,质量块依靠惯性运动牵引系绳带动柔性网展开,网体展开后通过质量块内的收口装置控制绳网收紧网口实现对目标体的包裹,如图1所示。传统柔性网捕获系统存在一定的局限和不足:1) 网体展开过程中易发生缠绕;2)网体展开后难以保持其空间构型。
实用新型内容
针对现有技术中网体展开过程中易发生缠绕以及网体展开后难以保持其空间构型等问题,本实用新型提供一种空间仿生柔性捕获装置及其地面试验系统,利用旋转离心力实现网体展开,有效的解决了网体展开过程中的缠绕问题以及构成保持问题。
为实现上述目的,本实用新型提供一种空间仿生柔性捕获装置,包括捕获组件、传动组件、驱动组件;
所述捕获组件包括中心刚体、捕获网与质量块,所述中心刚体连接在捕获网的中心位置,所述质量块的数量为多个且沿间隔设在捕获网的边缘位置;
所述传动组件包括传动轴,所述传动轴的一端与驱动组件传动相连,所述中心刚体、质量块吸附连接在传动轴的另一端,以使得中心刚体、质量块在传动轴旋转过程中脱落并使捕获网在旋转离心力的作用下展开释放。
进一步优选的,所述捕获网为仿生柔性网;
所述仿生柔性网包括若干呈放射状分布的第一捕获索,每相邻的两个第一捕获索之间通过若干间隔的第二捕获索相连以使得仿生柔性网构成蜘蛛网结构;
各第一捕获索朝内的一端均连接在中心刚体上并构成环形结构,所述质量块的数量与第一捕获索相对应,所述质量块连接在对应第一捕获索的另一端,所述第一捕获索与第二捕获索均由柔性材料制成。
进一步优选的,所述传动轴上对应捕获网的一端设有托盘,所述中心刚体吸附连接在传动轴的端部,所述质量块吸附连接在托盘内,所述捕获网盘绕在托盘内。
进一步优选的,空间仿生柔性捕获装置还包括动力组件,所述驱动组件与动力组件电联,所述传动轴由电磁铁材料制成,所述传动轴上转动连接有导电滑环,所述传动轴通过导电滑环与动力组件电联,所述质量块与中心刚体均通过磁力吸附在传动轴上。
进一步优选的,空间仿生柔性捕获装置还包括吸附组件,所述吸附组件包括若干环绕在传动轴周围的电磁铁,各电磁铁均与动力组件电联。
进一步优选的,空间仿生柔性捕获装置还包括支架组件,所述支架组件包括依次相连的安装架、连接筒与收纳桶,所述连接筒两端开口,所述收纳桶一端开口,另一端设有连通孔;
所述驱动组件设在安装架上,所述吸附组件位于收纳桶内,所述传动轴的一端位于安装架上并与驱动组件传动相连,所述传动轴的另一端穿过连接筒、连通孔后位于收纳桶内靠近收纳桶开口的位置。
进一步优选的,所述传动组件还包括设在连接筒内的轴承座、轴用卡簧与轴承,所述轴承座固定连接在连接筒,所述轴承套设在连接轴上并与轴承座转到相连,所述轴用卡簧套设在连接轴上并与轴承相贴以防止轴承轴向窜动。
为实现上述目的,本实用新型还公开了一种空间仿生柔性捕获装置地面试验系统,包括试验架、目标平台、摄像装置、数据采集装置与上述的空间仿生柔性捕获装置;
所述目标平台设在试验架的下方,所述空间仿生柔性捕获装置设在试验架上且具有捕获组件的一端朝向目标平台;
所述目标平台与空间仿生柔性捕获装置之间的空间位于摄像装置的拍摄视场内,所述数据采集装置与摄像装置电联。
进一步优选的,还包括光源,所述目标平台与空间仿生柔性捕获装置之间的空间位于光源的光路上。
进一步优选的,所述摄像装置为高速摄像机。
本实用新型提供的一种空间仿生柔性捕获装置及其地面试验系统,通过将中心刚体、质量块吸附连接在传动轴上,使得中心刚体、质量块在传动轴旋转过程中脱落并使捕获网在旋转离心力的作用下展开释放,进而有效的解决了网体展开过程中的缠绕问题以及构成保持问题。
附图说明
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
图1为本实用新型实施例中空间仿生柔性捕获装置结构示意图;
图2为本实用新型实施例中捕获网的结构示意图;
图3为本实用新型实施例中地面试验系统的示意图;
图4为本实用新型实施例中捕获网的实体线条图;
图5为本实用新型实施例中捕获网旋转展开试验过程的线条图;
图6为本实用新型实施例中捕获网抓捕试验场景的线条图;
图7为本实用新型实施例中捕获网抓捕试验过程的线条图;
图8为本实用新型实施例中捕获网抓捕试验结果的线条图。
附图标号说明:1-电机底座;2-驱动组件;3-传动轴;5-动力组件;601- 轴承座601;602-轴用卡簧;603-轴承;604-导电滑环;701-捕获网;702-中心刚体;703-托盘;704-质量块;801-电磁铁;901-光源;902-试验架;903- 目标平台;904-摄像装置;905-数据采集装置。
本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后……)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
另外,在本实用新型中如涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
在本实用新型中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接,还可以是物理连接或无线通信连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
另外,本实用新型各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
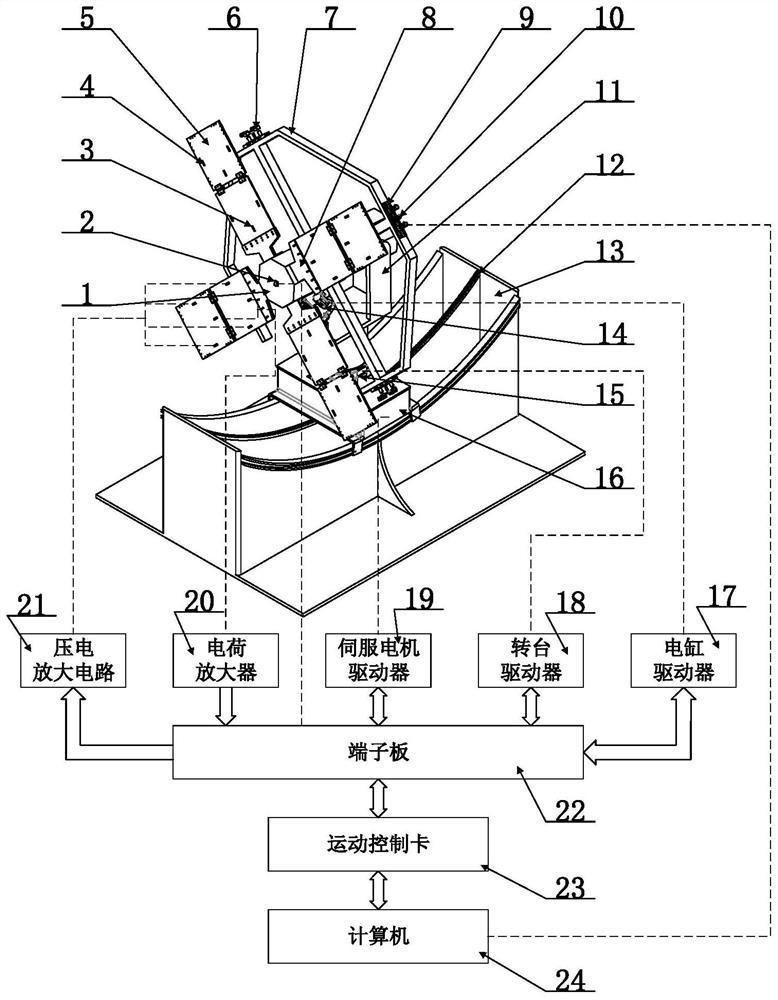
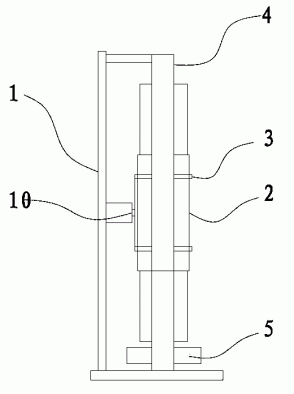
如图1所示的一种空间仿生柔性捕获装置,包括捕获组件、传动组件、驱动组件2与动力组件5。其中,捕获组件包括中心刚体702、捕获网701与质量块704,中心刚体702连接在捕获网701的中心位置,质量块704的数量为多个且沿间隔设在捕获网701的边缘位置,质量块704与中心刚体702均由具有磁吸附能力的金属制成。
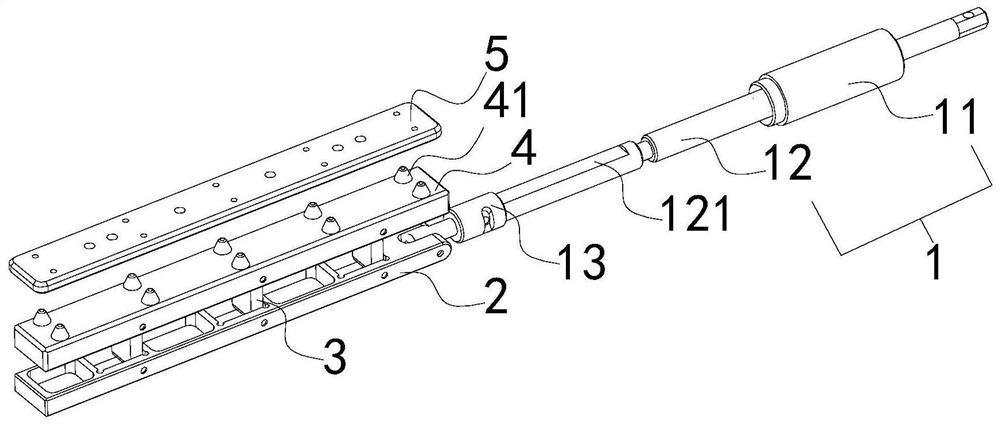
参考图2,本实施例中,捕获网701为仿生捕获网701,具体包括若干呈放射状分布的第一捕获索,每相邻的两个第一捕获索之间通过若干间隔的第二捕获索相连以使得仿生捕获网701构成蜘蛛网结构。其中,第一捕捉索21 与第二捕捉索22均由PE渔线制成。各第一捕获索朝内的一端均连接在中心刚体702上并构成环形结构,质量块704的数量与第一捕获索相对应,质量块704连接在对应第一捕获索的另一端,第一捕获索与第二捕获索均由柔性材料制成。
优选的,中心刚体702为八边形板状结构,第一捕获索的数量为八条,使得捕获网701构成八边形构型的蜘蛛网结构,蜘蛛网结构的捕获网701能够有效地提高网体结构的稳定性并加快捕获空间碎片后的能量耗散。
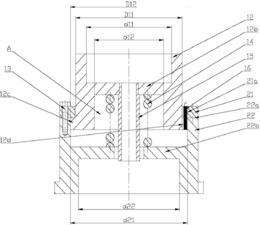
传动组件包括传动轴3,传动轴3的一端与驱动组件2传动相连,中心刚体702、质量块704吸附连接在传动轴3的另一端,以使得中心刚体702、质量块704在传动轴3旋转过程中脱落并使捕获网701在旋转离心力的作用下展开释放。其中,中心刚体702与质量块704通过磁力吸附或吸盘吸附在传动轴3上;具体的,传动轴3由电磁铁801材料制成,且传动轴3上转动连接有导电滑环604,传动轴3通过导电滑环604与动力组件5电联,传动组件在动力组件5提供电力的情况下产生磁力,进而将质量块704与中心刚体702 均通过磁力吸附在传动轴3上。
优选的,传动轴3上对应捕获网701的一端设有托盘703,中心刚体702 吸附连接在传动轴3的端部,质量块704吸附连接在托盘703内,捕获网701 盘绕在托盘703内。托盘703由电磁铁801材料制成,通过在传动轴3的端部增设托盘703,既能对捕获网701起到收纳存储的作用,也能对传动轴3的端部起到面积拓展的作用,使得传动轴3的端部具有更大的面积用于吸附中心刚体702与质量块704,进一步使捕获网701能够规整的盘绕在传动轴3端部,以提升后续的旋转展开效果。
优选的,空间仿生柔性捕获装置还包括吸附组件,吸附组件包括若干环绕在传动轴3中部周围的电磁铁801且与质量块704一一对应,具体的,电磁铁801与对应质量块704所在的直线与传动轴3的轴线平行;各电磁铁801 均与动力组件5电联;电磁铁801在动力组件5提供电力的情况下产生磁力,进而对质量块704产生向内的吸附作用,其中向内指的是由传动轴3对应捕获网701的一端到另一端的方向,使得质量块704能够更加稳固的吸附在传达轴上。
空间仿生柔性捕获装置还包括支架组件,支架组件包括依次相连的安装架、连接筒与收纳桶,连接筒两端开口,收纳桶一端开口,另一端设有连通孔;驱动组件2设在安装架上,吸附组件位于收纳桶内,传动轴3的一端位于安装架上并与驱动组件2传动相连,传动轴3的另一端穿过连接筒、连通孔后位于收纳桶内靠近收纳桶开口的位置。
传动组件还包括设在连接筒内的轴承座601、轴用卡簧602与轴承603,轴承座601固定连接在连接筒,轴承603套设在连接轴上并与轴承座601转到相连,轴用卡簧602套设在连接轴上并与轴承603相贴以防止轴承603轴向窜动。
本实施例中,安装架为圆柱形,直径为100mm,选用6061铝合金材质,作为电机底座1;驱动组件2为雷赛57CM12X步进电机,电机保持转矩为 1.2N·M,额定电压为2.4V,定位转矩0.026N·M,重量为0.7kg;电磁铁801 选用P20/15直流吸盘式电磁铁801;动力组件5选用24V直流适配器;导电滑环604选用6路5A型导电滑环604。
本实施例中空间仿生柔性捕获装置的工作过程为:初始状态下,将捕获网701盘绕在托盘703内,并开启动力组件5使得动力组件5为传动轴3与电磁铁801提供电力,使得中心刚体702吸附在传动轴3的端部以及质量块 704沿环形间隔吸附在托盘703内;需要捕获空间碎片时,动力组件5向驱动组件2提供电力使得组队组件开始运行,进而带动传动轴3转动,当传动轴3 的转速达到一定数值后,动力组件5停止向传动轴3与电磁铁801供电,使得传动轴3与电磁铁801的磁力消失,使得中心刚体702、质量块704从传动轴3、托盘703上脱落,并带动捕获网701转到,使得捕获网701在旋转离心力的作用下展开释放,进而有效的解决了网体展开过程中的缠绕问题以及构成保持问题。
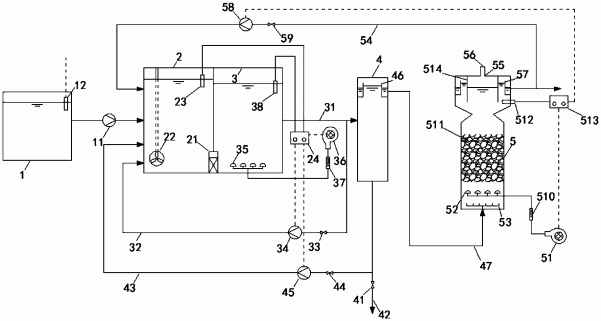
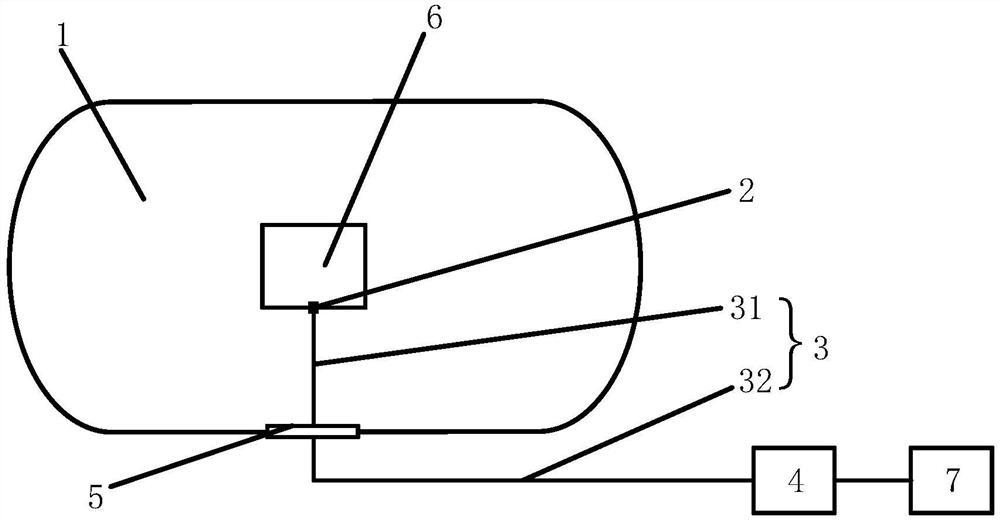
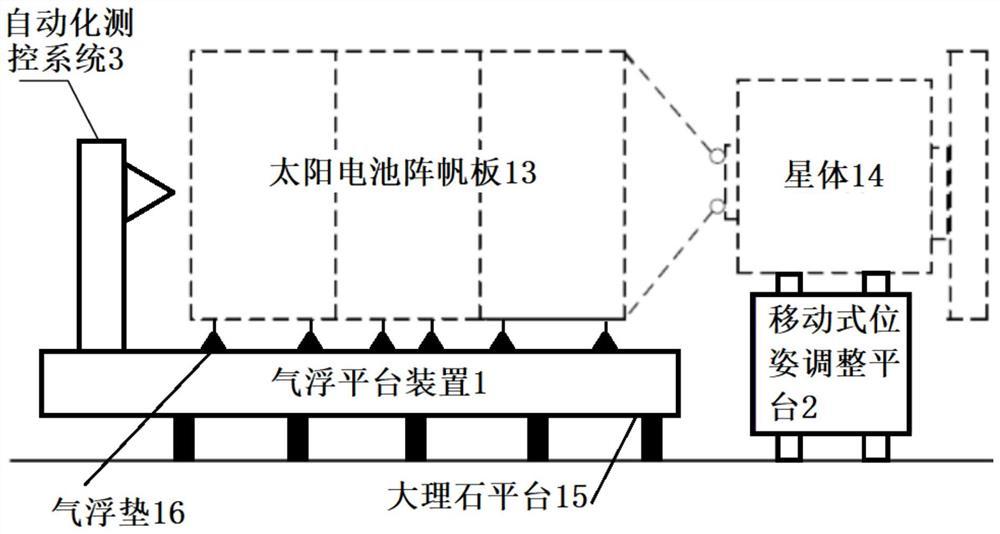
为验证捕获网701旋转展开动力学模型和碰撞动力学模型的有效性,开展了“蛛网”柔性抓捕装置的地面试验研究。如图3所示的,本实施例还公开了一种空间仿生柔性捕获装置地面试验系统,包括光源901、试验架902、目标平台903、摄像装置904、数据采集装置905与上述的空间仿生柔性捕获装置,其中,摄像装置为高速摄像机,数据采集装置为通用计算机。目标平台设在试验架的下方,空间仿生柔性捕获装置设在试验架上且具有捕获组件的一端朝向目标平台;目标平台与空间仿生柔性捕获装置之间的空间位于摄像装置的拍摄视场内,数据采集装置与摄像装置电联。目标平台与空间仿生柔性捕获装置之间的空间位于光源的光路上。
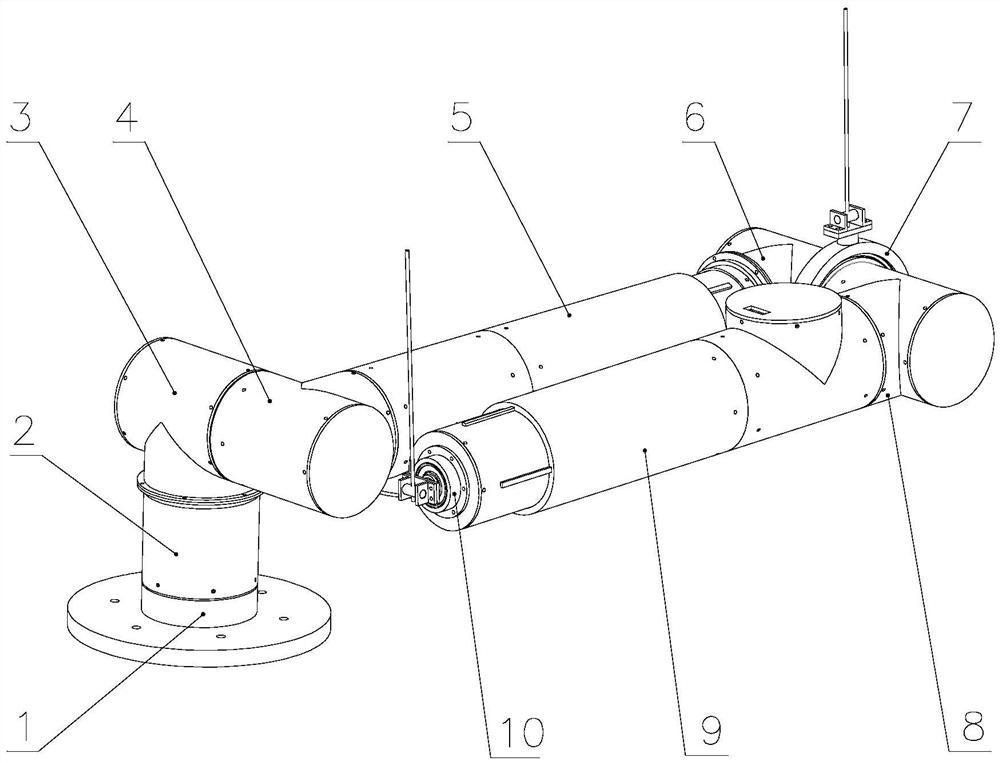
地面试验系统采用小型捕获网701。如图4所示,捕获网701采用八边形结构,网体结构对角线直径为1000mm,绳段直径为0.3mm,网体通过聚乙烯纤维材料编织而成,其材料参数见表1。质量块704采用磁性铁块,单个磁性质量块704质量为5g。
表1捕获网701材料参数
首先进行捕获网701网旋转展开地面验证试验
本试验采用的高速摄像机选取的拍摄频率为400HZ,即摄像机每秒可获得 400帧序列图像。本次试验的主要目的是验证捕获网701旋转展开的可行性,试验开始时通过调速电机带动传动轴3旋转,经过多次调试,当电机转速达到460转/min后,网体通过磁性质量块704消磁并牵引可实现旋转展开效果。从高速摄像机拍摄的动态过程可以看出,数值模拟仿真结果与实际旋转展开效果基本相符,充分验证了旋转展开动力学模型的准确性以及捕获网701旋转展开的可行性,旋转展开地面试验的动态展示请参见附件,图5选取了展开过程中捕获网701的典型状态。
其次进行捕获网701抓捕效果地面验证试验
本试验的目的是为了测试“蛛网”柔性抓捕装置的捕获效果,以及碰撞动力学模型验证,图6所示的是捕获网701抓捕试验场景。通过高速摄像机拍摄的动态画面,选取捕获网701与目标体碰撞过程中典型的网形姿态变化时刻进行分析,如图7所示。由图7可知,捕获网701在与目标体碰撞并包裹的过程中,基于碰撞动力学模型的仿真网体形态变化与地面试验中网体的形态变化基本吻合,由于地球重力以及地面试验中捕获网701存在编织误差等影响,网体在抓捕目标后的收口状态稍有不同。抓捕效果地面验证试验结果,如图8所示。总体而言,本次试验结果可以较好地验证碰撞动力学模型的准确性。
以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型的发明构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型的专利保护范围内。
一种空间仿生柔性捕获装置及其地面试验系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0