

IPC分类号 : B60Q1/44,B60Q1/46,B60Q11/00,B60K31/18,G08G1/16,G08G1/017,G08G1/052,G08G1/09









专利摘要
本发明公开了一种货车制动鼓温升预警方法,首先在货车进入长下坡路段前的上坡路段,获取货车的载重量;然后判断大型货车在长下坡路段是否采取制动;若是,采集货车采取制动时刻的制动初始速度、制动时间以及制动结束时的制动终止速度;再预测货车在制动过程中的制动鼓温升情况以及货车当前制动鼓温升情况;最后根据货车的载重量和货车当前制动鼓温升情况,判断货车的危险程度,并根据危险程度对货车进行预警。本发明的方法结合了货车的实际载重量和实际的制动鼓温升情况,对货车驾驶员进行有效预警,防止事故发生。
权利要求
1.一种货车在长下坡路段制动鼓温升的预警方法,其特征在于,包括以下步骤:
步骤1,在货车进入长下坡路段前的上坡路段,获取货车的载重量;
步骤2,判断大型货车在长下坡路段是否采取制动;若是,采集货车采取制动时刻的制动初始速度v
步骤3,根据步骤2所采集的制动初始速度v
步骤4,重复步骤2-步骤3,预测货车在长下坡路段中每段制动过程的制动鼓温升情况,获得货车当前制动鼓温升情况T
步骤5,根据货车的载重量和货车当前制动鼓温升情况T
2.根据权利要求1所述的货车在长下坡路段制动鼓温升的预警方法,其特征在于,步骤1包含以下子步骤:
子步骤1.1,在大型货车行驶路段中选取上坡路段;
子步骤1.2,将不同类型的大型货车分别在不同载重量的条件下正常行驶在所述上坡路段,并采集其速度特征信息;获得不同类型的大型货车分别在不同载重量的条件下的行驶速度特征数据库;
子步骤1.3,当某大型货车行驶在所述上坡路段时,获取其车型信息和实时速度信息,并与所述行驶速度特征数据库中的信息进行匹配,根据匹配结果,确定当前大型货车的载重量。
3.根据权利要求1所述的货车在长下坡路段制动鼓温升的预警方法,其特征在于,步骤2中,所述判断大型货车在长下坡路段是否采取制动,具体为:
首先采用车辆跟踪算法对大型货车的尾灯进行跟踪,记录车尾灯的开启、熄灭时间;
然后判断车尾灯的开启、熄灭时间是否满足双闪灯的开启条件;若不满足,则认为是制动灯开启;
其中,所述双闪灯的开启条件为:车尾灯开启持续时间低于3s、存在3次以上的开启和熄灭过程、前3次的车尾灯开启持续时间之间的标准差不超过0.5、相邻两次车尾灯开启时刻之间的时间间隔不超过1s。
4.根据权利要求1所述的货车在长下坡路段制动鼓温升的预警方法,其特征在于,步骤3中,预测所述货车在制动过程中的制动鼓温升情况T
其中,T
5.根据权利要求1所述的货车在长下坡路段制动鼓温升的预警方法,其特征在于,所述获得货车当前制动鼓温升情况T
其中,j为当前记录到的连续制动的次数。
6.根据权利要求1所述的货车在长下坡路段制动鼓温升的预警方法,其特征在于,步骤5中,包含以下子步骤:
子步骤5.1,将载重量分为多个级别;
子步骤5.2,将制动鼓温升情况分为多个级别;
子步骤5.3,根据货车当前载重量的级别和货车当前制动鼓温升情况的级别,判断货车的危险程度,并根据危险程度对货车进行预警。
7.根据权利要求6所述的货车在长下坡路段制动鼓温升的预警方法,其特征在于,载重量分为重载、一般载荷和空载3个级别;制动鼓温升情况分为小于100℃、100-150℃、150-230℃和大于230℃4个级别。
8.根据权利要求7所述的货车在长下坡路段制动鼓温升的预警方法,其特征在于,子步骤5.3具体为:
当载重量为重载、制动鼓温升大于150℃时,货车的危险程度为极度危险;
当载重量为重载、制动鼓温升小于等于150℃且大于100℃时,货车的危险程度为中度危险;
当载重量为重载、制动鼓温升小于等于100℃时,货车的危险程度为一般危险;
当载重量为一般荷载、制动鼓温升大于230℃时,货车的危险程度为极度危险;
当载重量为一般荷载、制动鼓温升大于150℃小于等于230℃时,货车的危险程度为中度危险;
当载重量为一般荷载、制动鼓温升小于等于150℃且大于100℃时,货车的危险程度为一般危险;
当载重量为空载、制动鼓温升大于230℃时,货车的危险程度为极度危险;
当载重量为空载、制动鼓温升大于150℃小于等于230℃时,货车的危险程度为一般危险。
说明书
技术领域
本发明涉及道路交通安全技术领域,尤其涉及一种货车制动鼓温升预警方法。
背景技术
随着交通运输行业的发展,由于道路运输具有机动灵活、方便快捷、延伸自由度大和覆盖范围广的特点,使其在运输行业占据着重要的地位,特别是长途运输的大型货车成为了道路运输的主力军。大型货车具有载货量大和自身吨位重特点,特别是行驶在山区道路连续下长坡时,制动鼓温度上升会造成制动鼓、制动蹄(刹车片)温度上升造成制动效能热衰退,从而带来潜在的隐患。回顾道路运输中发生较为严重的安全事故,可以看出,大多数发生在长下坡路段由大型货车造成的生产事故都是由大型货车连续下长坡时,制动鼓温度过高,造成制动系统严重热衰退,最终造成大货车失速从而造成严重的安全事故。因此,对于大型货车行驶安全性问题亟待改善。
发明内容
针对现有技术中存在的问题,本发明的目的在于提供一种货车制动鼓温升预警方法,可结合货车的实际载重量和实际的制动鼓温升情况,对货车驾驶员进行有效预警,防止事故发生。
为达到上述目的,本发明采用以下技术方案予以实现。
一种货车在长下坡路段制动鼓温升的预警方法,包括以下步骤:
步骤1,在货车进入长下坡路段前的上坡路段,获取货车的载重量;
步骤2,判断大型货车在长下坡路段是否采取制动;若是,采集货车采取制动时刻的制动初始速度vis、制动时间ti以及制动结束时的制动终止速度vie;其中,i为制动次数,i=1,2,3,...;
步骤3,根据步骤2所采集的制动初始速度vis、制动时间ti以及制动终止速度vie,预测所述货车在制动过程中的制动鼓温升情况Ti;
步骤4,重复步骤2-步骤3,预测货车在长下坡路段中每段制动过程的制动鼓温升情况,获得货车当前制动鼓温升情况Ts;
步骤5,根据货车的载重量和货车当前制动鼓温升情况Ts,判断货车的危险程度,并根据危险程度对货车进行预警。
本发明技术方案的特点和进一步的改进在于:
(1)步骤1包含以下子步骤:
子步骤1.1,在大型货车行驶路段中选取上坡路段;
子步骤1.2,将不同类型的大型货车分别在不同载重量的条件下正常行驶在所述上坡路段,并采集其速度特征信息;获得不同类型的大型货车分别在不同载重量的条件下的行驶速度特征数据库;
子步骤1.3,当某大型货车行驶在所述上坡路段时,获取其车型信息和实时速度信息,并与所述行驶速度特征数据库中的信息进行匹配,根据匹配结果,确定当前大型货车的载重量。
(2)步骤2中,所述判断大型货车在长下坡路段是否采取制动,具体为:
首先采用车辆跟踪算法对大型货车的尾灯进行跟踪,记录车尾灯的开启、熄灭时间;
然后判断车尾灯的开启、熄灭时间是否满足双闪灯的开启条件;若不满足,则认为是制动灯开启;
其中,所述双闪灯的开启条件为:车尾灯开启持续时间低于3s、存在3次以上的开启和熄灭过程、前3次的车尾灯开启持续时间之间的标准差不超过0.5、相邻两次车尾灯开启时刻之间的时间间隔不超过1s。
(3)步骤3中,预测所述货车在制动过程中的制动鼓温升情况Ti,具体为:
其中,T0为制动鼓初始温度;A′为货车制动系统的有效热传导面积(m
(4)所述获得货车当前制动鼓温升情况Ts,具体为:
其中,j为当前记录到的连续制动的次数。
(5)步骤5中,包含以下子步骤:
子步骤5.1,将载重量分为多个级别;
子步骤5.2,将制动鼓温升情况分为多个级别;
子步骤5.3,根据货车当前载重量的级别和货车当前制动鼓温升情况的级别,判断货车的危险程度,并根据危险程度对货车进行预警。
(6)进一步的,载重量分为重载、一般载荷和空载3个级别;制动鼓温升情况分为小于100℃、100-150℃、150-230℃和大于230℃4个级别。
(7)进一步的,子步骤5.3具体为:
当载重量为重载、制动鼓温升大于150℃时,货车的危险程度为极度危险;
当载重量为重载、制动鼓温升小于等于150℃且大于100℃时,货车的危险程度为中度危险;
当载重量为重载、制动鼓温升小于等于100℃时,货车的危险程度为一般危险;
当载重量为一般荷载、制动鼓温升大于230℃时,货车的危险程度为极度危险;
当载重量为一般荷载、制动鼓温升大于150℃小于等于230℃时,货车的危险程度为中度危险;
当载重量为一般荷载、制动鼓温升小于等于150℃且大于100℃时,货车的危险程度为一般危险;
当载重量为空载、制动鼓温升大于230℃时,货车的危险程度为极度危险;
当载重量为空载、制动鼓温升大于150℃小于等于230℃时,货车的危险程度为一般危险。
与现有技术相比,本发明的有益效果为:
本发明提供的一种货车在长下坡路段制动鼓温升的预警方法通过对货车的识别,获取货车的当前载重量,并根据对货车的运动参数的跟踪,预测货车在长下坡路段中制动鼓温升情况,最后根据货车的当前载重量和制动鼓温升情况,判断货车的危险程度,并根据危险程度对货车进行预警。本发明的方法结合了货车的实际载重量和实际的制动鼓温升情况,对货车驾驶员进行有效预警,防止事故发生。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
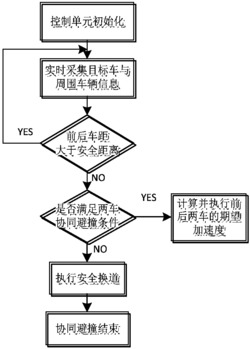
图1为本发明提供的货车在长下坡路段制动鼓温升的预警方法的一种实施例的流程示意图;
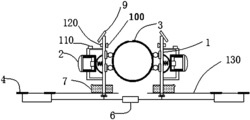
图2为本发明提供的货车在长下坡路段制动鼓温升的预警装置的一种实施例的结构示意图。
以上图中:1一体化传感模块;11微波雷达;12激光雷达;13AI摄像机;14传感器融合单元;2数据存储器;3数据处理器;4控制器;5预警模块;51警示灯;52语音播放装置;53LED屏幕;6悬臂杆;7充电装置。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参考图1,本发明实施例提供了一种货车在长下坡路段制动鼓温升的预警方法,包括以下步骤:
步骤1,在货车进入长下坡路段前的上坡路段,获取货车的载重量。
具体的,包含以下子步骤:
子步骤1.1,在大型货车行驶路段中选取上坡路段;
子步骤1.2,将不同类型的大型货车分别在不同载重量的条件下正常行驶在所述上坡路段,并采集其速度特征信息;获得不同类型的大型货车分别在不同载重量的条件下的行驶速度特征数据库;
子步骤1.3,当某大型货车行驶在所述上坡路段时,获取其车型信息和实时速度信息,并与所述行驶速度特征数据库中的信息进行匹配,根据匹配结果,确定当前大型货车的载重量。
本实施例中,上坡路段选取在进入弯道之前的坡度大于3%的上坡路段。
本实施例中,将载重量分为3级,分别为重载、一般载荷和空载,子步骤1.2中,将不同类型的大型货车分别在重载、一般载荷和空载的条件下正常行驶在上坡路段,并采集其速度特征信息;从而获得不同类型的大型货车分别在上述3种级别的载重量的条件下的行驶速度特征数据库;进而在子步骤1.3中,即可获得当前大货车的载重级别。
步骤2,判断大型货车在长下坡路段是否采取制动;若是,采集货车采取制动时刻的制动初始速度vis、制动时间ti以及制动结束时的制动终止速度vie;其中,i为制动次数,i=1,2,3,...。
其中,所述判断大型货车在长下坡路段是否采取制动,即判断大型货车是否开启制动灯,具体为:
首先采用车辆跟踪算法对大型货车的尾灯进行跟踪,记录车尾灯的开启、熄灭时间;
然后判断车尾灯的开启、熄灭时间是否满足双闪灯的开启条件;若不满足,则认为是制动灯开启;
其中,所述双闪灯的开启条件为:车尾灯开启持续时间低于3s、存在3次以上的开启和熄灭过程、前3次的车尾灯开启持续时间之间的标准差不超过0.5、相邻两次车尾灯开启时刻之间的时间间隔不超过1s。
本实施例中,对制动灯开启的判断方法,具体为:
(1)采用图像灰度分析选取每个大型货车的图像中的候选区域;使用最大类间方差法将候选区域进行分割,再经形态学变换,得到候选车灯区域;
具体按照以下步骤实施:
(1.1)采用HSV颜色空间进行阈值过滤,得到对应的候选车辆尾灯区域二值图;
其中,所述阈值过滤中的阈值为342°<H<360°且0.45<S<1.0或0°<H<30°且0.45<S<1.0;H为色调,S为饱和度;
(1.2)对候选车辆尾灯区域二值图进行高斯变换,得到对应的分散点灰度值;
(1.3)将每个分散点灰度值进行归一化后作为加权比例系数;将原始车辆图像从RGB空间转换成对应灰度图;将每个加权比例系数与RGB空间对应灰度图中对应各点的灰度值进行乘积,确定对应的候选区域。
所述归一化的公式为:
式中,I(i,j)表示分散点灰度值,N(i,j)表示分散点灰度值归一化后的值;min和max分别表示所有分散点灰度值的最小灰度值和最大灰度值。
此处利用该系数在由HSV颜色阈值检测到的车尾灯区域中比较大,其他区域系数值则较小的特性对车尾灯区域进行粗提取。
(1.4)所述使用最大类间方差法将候选区域进行分割,具体为:
通过遍历0-255作为分割阈值,将候选区域分为两个区域,分别计算每个分割阈值对应的两个区域的方差,并将方差最大时对应的两个区域作为最终分割结果。
(1.5)所述形态学变换为先进行腐蚀操作再进行膨胀操作。
利用形态学变换消除图像中的尾灯区域的内部孔洞从而得到车尾灯的轮廓。一般来讲,形态学变换中的膨胀操作使得原目标范围扩大、并且可以使目标中的孔洞被缩小,而腐蚀操作则可以减小原目标的范围、但同时内部孔洞被放大。所以为了消除二值图中面积较小的或者孤立的区域,首先对图像进行腐蚀操作,然后将腐蚀后的二值图进行膨胀操作,使得原相邻区域重新连通。
(2)判断候选车灯区域是否为2,若是,则对候选车灯区域进行几何配对,确定车尾灯并转至步骤(3);否则,判断为转向灯开启,转至(1)重新获取车辆图像;
具体按照以下步骤实施:
(2.1)设定两个候选车灯区域分别为A、B,其面积分别为S1、S2;
(2.2)判断两个候选车灯区域的面积是否相近:
|S1-S2|<K*minS
其中,K为面积比例系数,||为取绝对值操作,minS为S1和S2中的较小值;
(2.3)判断两个候选车灯区域的中心位置,判断两个候选车灯区域中心位置在竖直方向上的距离ydistance是否满足水平配对阈值:
ydistance<G*minHeight
其中,minHeight表示A区域高度和B区域高度的较小值,G是高度比例系数;
(2.4)判断两个候选车灯区域在水平方向上的距离xdistance是否满足车尾灯间距约束条件:
M*minWidth<xdistance<N*minWidth
其中,M、N分别为宽度比例系数,minWidth为A区域宽度与B区域宽度中的较小值;
若候选车灯区域满足步骤(2.2)-(2.4),则几何配对成功,确定该候选车灯区域为车尾灯。
以上过程中的各比例系数在实际中需要根据先验知识设定,本发明实施例使用的先验值分别为K=1.5,G=3,M=3,N=10。
(3)采用车辆跟踪算法对车尾灯进行跟踪,记录车尾灯的开启、熄灭时间;
具体步骤为:
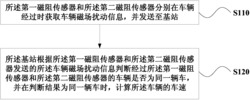
首先,获取当前时刻每个车辆的位置信息,当前时刻每个车辆的车速vi、及对应车身长度为li,相邻时刻时间间隔为t;
然后,利用RGB颜色空间确定当前时刻每个车辆图片的所有像素点的R、G、B分量值;判断相邻时刻的车辆图像是否满足同一车辆判断条件,若是,则判断为同一车辆,即车辆跟踪成功;
相邻时刻判断为同一车辆必须同时满足以下条件:
(a)同一车辆在相邻两帧图像中处于同一车道;即:
首先,根据车辆位置信息,得到车辆到毫米波雷达之间的距离di、车辆与毫米波雷达连线与水平方向的夹角θ,进而得到车辆在水平方向上距毫米波雷达的距离di';
其中,水平方向为水平面内与车辆行驶方向垂直的方向;
然后,当0<di'<3.75,判断车辆处于慢车道;当3.75<di'<7.5,判断车辆处于中间车道;当7.5<di'<11.25,判断车辆处于快车道。
若相邻两帧图像的判断结果相同,则满足该条要求。
(b)同一车辆的车身长度li在相邻两帧图像中的变化不超过1%;
(c)计算相邻时刻车辆的行驶距离si=vi×t,以si为半径搜索车辆,则下一时刻该车辆应处于搜索范围内;
(d)分别计算当前时刻车辆图像中所有像素点的R、G、B分量对应的平均值,同一车辆在相邻时刻的R分量平均值、G分量平均值、B分量平均值的变化分别不超过5%。
(4)判断每对车尾灯开启持续时间是否大于雾灯阈值,若是,则判断为雾灯开启;否则,进一步判断车尾灯开启持续时间是否满足双闪灯开启判断条件,若是,则确认双闪灯开启,否则,判断为制动灯开启;
其中,所述双闪灯开启判断条件为同时满足以下条件:车尾灯开启持续时间低于3s、存在3次以上的开启和熄灭过程、前3次的车尾灯开启持续时间之间的标准差不超过0.5、相邻两次车尾灯开启时刻之间的时间间隔不超过1s。
本实施例的雾灯阈值为10s。
步骤3,根据步骤2所采集的制动初始速度vis、制动时间ti以及制动终止速度vie,预测所述货车在制动过程中的制动鼓温升情况Ti。
预测所述货车在制动过程中的制动鼓温升情况Ti,具体为:
其中,T0为制动鼓初始温度;A′为货车制动系统的有效热传导面积(m
步骤4,重复步骤2-步骤3,预测货车在长下坡路段中每段制动过程的制动鼓温升情况,获得货车当前制动鼓温升情况Ts。
所述获得货车当前制动鼓温升情况Ts,具体为:
其中,j为当前记录到的连续制动的次数。
步骤5,根据货车的载重量和货车当前制动鼓温升情况Ts,判断货车的危险程度,并根据危险程度对货车进行预警。
包含以下子步骤:
子步骤5.1,将载重量分为多个级别。
由上述实施例可知,本实施例将载重量分为3级,分别为重载、一般载荷和空载。
子步骤5.2,将制动鼓温升情况分为多个级别。
本实施例中,具体将制动鼓温升情况分为小于100℃、100-150℃、150-230℃和大于230℃4个级别。
子步骤5.3,根据货车当前载重量的级别和货车当前制动鼓温升情况的级别,判断货车的危险程度,并根据危险程度对货车进行预警。
具体的,本实施例按照下表1判断货车的危险程度。
表1货车的危险程度判断表
由上表可知,当货车的危险程度判断为极度危险和中度危险时,即刻向货车驾驶员发出预警提示,并提醒其制动鼓温升非常大,车辆极易发生事故;同时根据危险程度提醒驾驶员立刻采取相应的应急措施,比如打开制动鼓降温水管阀门、或者降低使用制动器使用频率改用排气制动并降低行驶档位等,以及前方降温池的方位信息等措施;同时,提醒下游车辆注意避让;并持续实时监测货车的速度、制动鼓温升的情况。
当货车的危险程度判断为中度危险和一般危险时,及时向货车驾驶人发出预警信息,并提醒货车驾驶人及时采取相应的应急措施,比如打开制动鼓降温水管阀门或采用排气制动,减少制动器的使用频率等;并持续实时监测货车的速度、制动鼓温升的情况。
当货车的危险程度判断为安全时,不向货车驾驶人发出预警信息。
进一步的,参考图2,本发明实施例还提供了一种预警装置,用于实现上述货车在长下坡路段制动鼓温升的预警方法,包括一体化传感模块、数据存储器、数据处理器、控制器和预警模块;其中,所述一体化传感模块包含微波雷达、激光雷达、AI摄像机和传感器融合单元;预警模块可以包含警示灯、语音提醒器和LED道路可变信息警示牌。
每个预警装置可以通过悬臂杆安装于长下坡路段路侧。此外,每个个性化预警装置还连接有充电装置,可以为个性化预警装置中的电子元器件供电充电装置可以为太阳能供电装置或其他现有的道路适用的充电装置。
其中,所述微波雷达、激光雷达、AI摄像机的输出端分别连接所述传感器融合单元的输入端,所述传感器融合单元的输出端连接所述数据存储器的输入端,所述数据存储器的输出端连接所述数据处理器的输入端,所述数据处理器的输出端连接所述控制器的输入端,所述控制器的输出端连接所述预警模块的输入端。
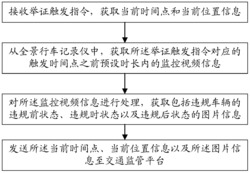
具体的,微波雷达用于追踪目标,并获取目标车辆的速度、速度曲线、连续路段的速度曲线以及位置等信息。AI摄像机用于采集行驶在该预警装置范围内的车辆的图像信息,图像信息包括轮廓、车辆位置、车辆颜色、车辆车牌号等信息;激光雷达用于采集行驶在该预警装置范围内的车辆的3D轮廓、颜色、位置速度等信息。
微波雷达、AI摄像机以及激光雷达将其各自采集的信息发送至传感器融合单元,传感器融合单元将接收到的各个信息进行汇总融合,即实现对在该预警装置范围内行驶车辆的追踪,记录各车辆的轮廓信息、速度、加速度、实时位置等信息,并将融合后的信息发送至数据存储器。
数据存储器内部预先存储有该预警装置范围内的长下坡路段以及进入长下坡路段之前的上坡路段的道路模型、以及目前市面上各类货车的特征参数,包括轴距B、轮距la和lb、质心高度、车轮排列方式和载货量等信息,建立不同类型大货车辆的装备质量参数和载重质量参数数据库。数据存储器根据其接收到的车辆的特征信息与其预先存储的信息进行对比匹配,即可识别大型货车,获得大型货车的特征参数。最后将匹配后的数据发送至数据处理器。
数据处理器根据接收的数据信息进行数据分析,并将分析的结果传输给控制器,最后控制器根据接收到的控制信息控制预警装置对制动鼓温升较大的货车进行预警。
具体的,
上述实施例提供的货车在长下坡路段制动鼓温升的预警方法中,首先通过GPS装置获取在进入弯道之前的坡度大于3%的上坡路段信息,在上坡路段间隔100米连续安装至少3个上述预警装置,安装高度不小于3.5米;多个预警装置之间采用TCP/IP通讯协议,通讯接口设置在所述数据处理器上;以此实现对货车的载重量的识别。
然后,在长下坡路段连续安装多个预警装置,安装高度不小于3.5米;多个预警装置之间采用TCP/IP通讯协议,通讯接口设置在所述数据处理器上;以此实现对货车的持续跟踪。
本实施例可通过警示灯和语音提醒器提醒货车驾驶人制动鼓温升过高,及时采取相应措施等预警内容,通过LED道路可变信息警示牌显示前方降温池的方位信息等。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
一种货车制动鼓温升预警方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0