







专利摘要
本文设计了一种风动转向多足机器人,包括风力收集装置、Jansen连杆行走机构和转向传动机构。在行走过程中,风给风力收集装置施加前进动力,从而带动Jansen连杆机构运动,实现整个装置的移动。不同的风向施加力的方向不同,则风力收集装置依据风向旋转方向有异。同时,风力收集装置的旋转会带动Jansen连杆行走机构的转动,再通过转向传动机构的传动,实现整个装置的转向。与现有的风动多足机器人相比,该产品增添了转向的功能,使机器人摆脱了单一的运动形式,随风向移动,行走更加灵活。
权利要求
1.风动转向多足机器人,包括:风力收集装置,Jansen连杆行走机构和转向传动机构;其特征在于,所述风力收集装置包括:由椭圆形凹槽的风帆构成,与固定Jansen连杆的前叉相连,且前叉与连接板之间安装轴承,构成转动副。
2.根据权利要求1所述的风动转向多足机器人,其特征在于,所述的转向传动机构包括:曲轴和万向结,第一曲轴和第二曲轴角度相同,第三曲轴和第四曲轴与第一曲轴和第二曲轴角度相差180度,相邻的两个曲轴之间用万向节相连。
说明书
技术领域
本实用新型涉及载物平台、工艺品、益智玩具等领域,具体涉及一种风动转向多足机器人。
背景技术
海滩怪兽是荷兰动能艺术家瑟·严森研究的系列动能艺术项目,这些怪兽只不过由一些简单的黄色塑料管或者塑料瓶组成,利用风能作为驱动力,运用一系列的机械原理,能在海滩上独立行走。他利用生物四肢的支撑与行走原理,结合环保与绿色概念,创造出节能且更顺应自然的移动方式,不仅带给世人全新的感受与反思,还获得了世界各大媒体的报导,引发了全球的模仿并利用此种原理陆续开发出许多新的应用。而怪兽身上最重要的部位,就是它们的“仿生腿”(步行系统)。在经历过无数次对动物的行走姿态观察,与上万次的电脑测算之后,泰奥·杨森终于找到了一个最优的方案,让这些软管构架起来的怪兽腿部,可以以最高效的姿态模仿动物的腿部进行行走。
近年来,我国也进行了足式机器人的试验研究工作,如清华大学,华中科技大学,哈工大机器人所等单位。但是,我国开始时间较国外许多国家完,在基础理论和研究成果上落后于发达国家,随着国家对机器人行业的重视力度逐渐加大,我国的机器人研究获得了飞速的发展。
对国内外风动多足机器人研究状况分析可知,现有产品只能实现直线运动,运动形式单一。因此,针对上述问题,有必要提供一种具有转向功能的风动多足机器人,以解决上诉缺陷。
发明内容
为了解决现有风动多足机器人只能实现直线运动,运动形式单一的问题,本实用新型提供一种风动转向多足机器人。
本实用新型为解决技术问题所采用的技术方案如下:
风动转向多足机器人,包括:风力收集装置、Jansen连杆行走机构和转向传动机构。其特征在于,所述风力收集装置包括:四个椭圆形风帆与下面四个前叉固连,凸出部分为装置运动方向,下端和前叉之间安设连接板,其装有轴承构成转动副,可以随风向转动。
所述的Jansen连杆行走机构和转向传动机构控制整个装置的前进和转向运动。Jansen机构将转动转换为直线的水平运动,两个构成一组,共四组维持装置的稳定,并且两组之间由曲轴和万向节相连,第一组第二组和第三组第四组曲轴角度相差180度,万向节实现装置转动的同时,运动可以仍然可以通过曲轴传导。
本实用新型的有益效果是:
1.本发明利用仿生学,靠风力驱动,无外加动力源,节能环保。
2.本发明采用轻型材料,质量较轻,成本低廉。
3.本发明解决了多足机器人转向问题,可作为新型移动平台;还可以弥补现阶段益智玩具市场的空缺,适用于多个应用领域。
附图说明
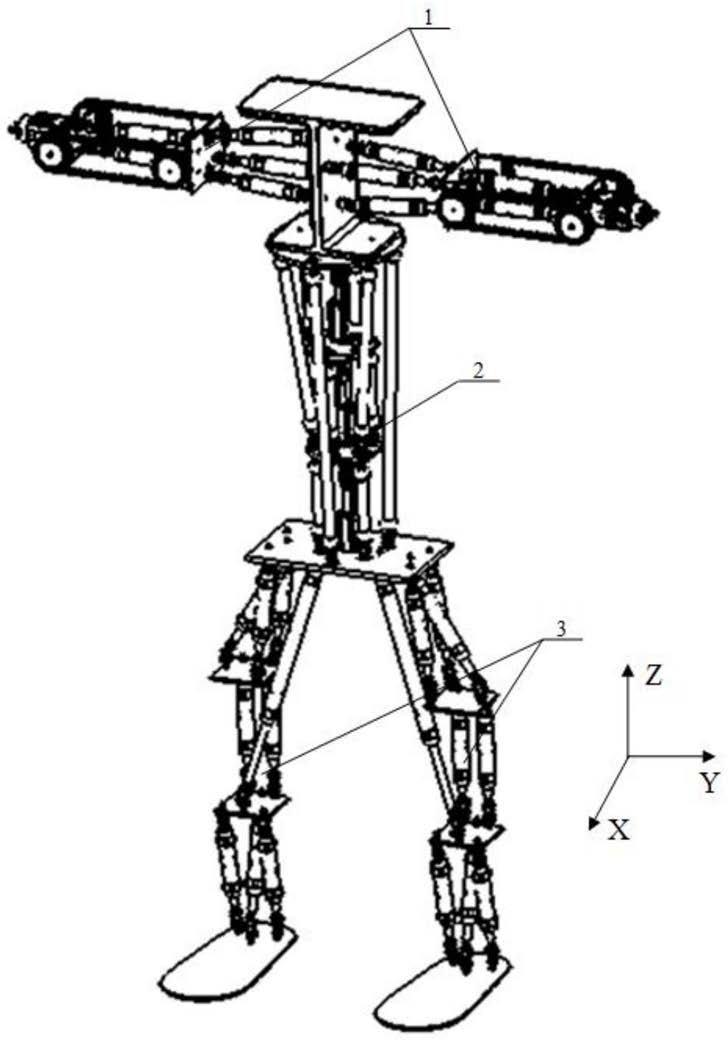
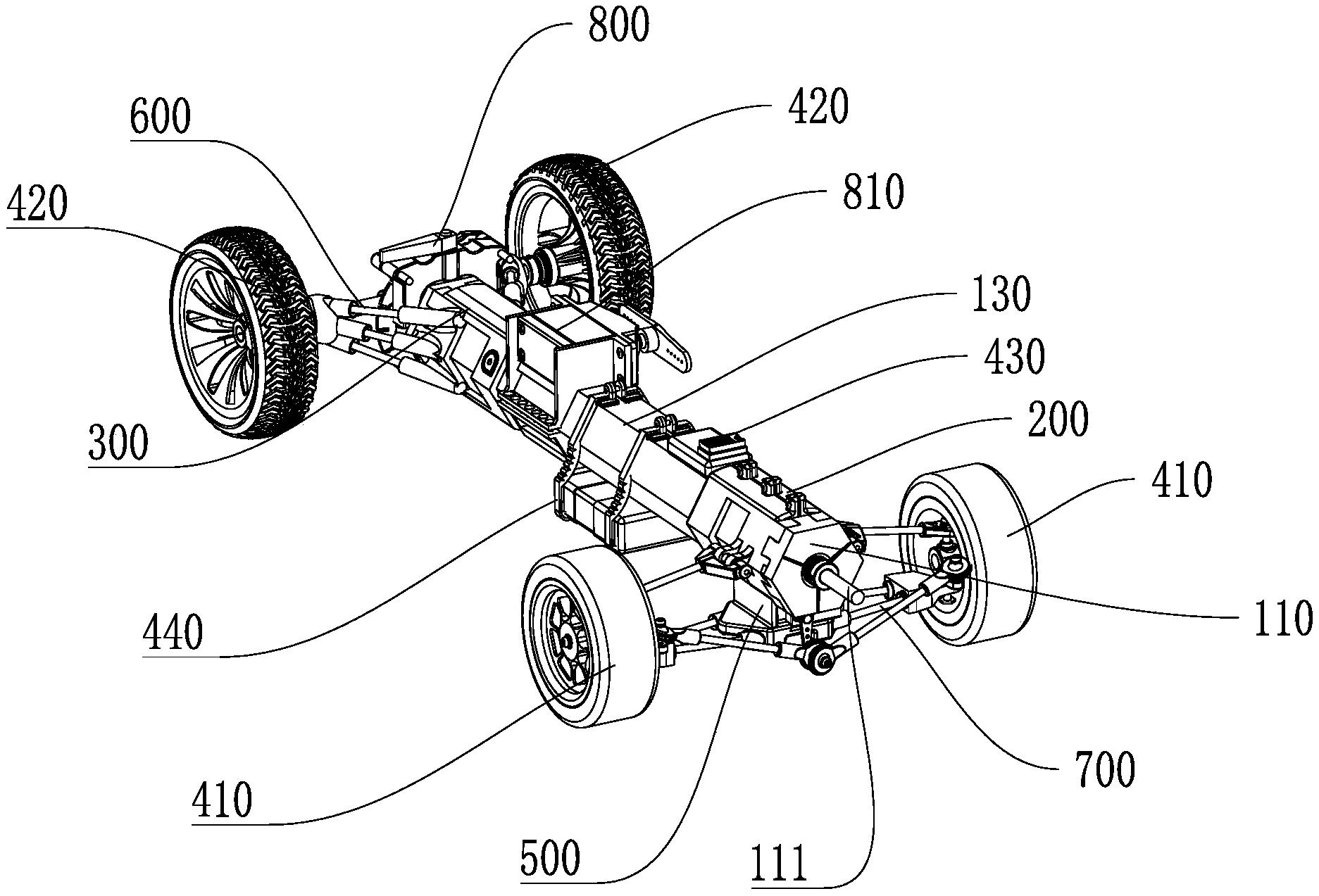
图1为本发明风动转向多足机器人的机体前侧结构示意图;
图2为本发明风动转向多足机器人的机体左侧结构示意图;
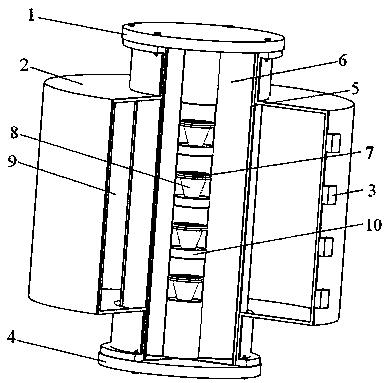
图3为本发明风动转向多足机器人的整体结构示意图;
图中:1-风帆、2-曲轴、3-万向节、4-连接板、5-前叉、6-Jansen结构
如图1-3所示,风动转向多足机器人,包括:风力收集装置,Jansen连杆6行走机构和转向传动机构;其特征在于,所述风力收集装置包括:由椭圆形凹槽的风帆1构成,与固定Jansen连杆的前叉5相连,且前叉与连接板4之间安装轴承,构成转动副。
所述的转向传动机构包括:曲轴2和万向结3,第一曲轴和第二曲轴角度相同,第三曲轴和第四曲轴与第一曲轴和第二曲轴角度相差180度,相邻的两个曲轴之间用万向节相连。
具体实施方式
在行走过程中,风给风力收集装置施加水平前进动力,从而推动Jansen连杆机构运动,将正常的轮转动转化为Jansen结构的“爬行”平面直线运动。不同的风向施加力的方向不同,则风力收集装置依据旋转方向有异。同时,风力收集装置的旋转会带动Jansen连杆行走机构的转动,再通过转向传动机构的传动,改变装置的运动方向,始终同风向保持一致。
风动转向多足机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0