








专利摘要
本发明公开了一种制造便捷的三维转动柔性机构,该机构由上圆盘(1)、下圆盘(2)、外环(3)与设置在外环内部的内环(4)以及簧片(5)构成,且上圆盘(1)和下圆盘(2)结构相同,下圆盘(2)的结构是上圆盘(1)绕Z轴转过180°的结构。上圆盘(1)和下圆盘(2)为一体成型件,是在一圆柱状材料上采用线切割技术切割制得,外环(3)和内环(4)结构相似,内环(4)的结构是外环(3)绕Z轴转过180°的结构,外环(3)和内环(4)为一体成型件,是在相同圆柱状材料上采用线切割技术切割制得。该机构分别设有十个簧片、六个中间刚体、四个刚体,由此使内环(4)与外环(3)上层相对下层具有绕空间坐标系纵轴Y转动和绕横轴X转动以及使上圆盘(1)与下圆盘(2)上层相对于下层具有绕空间坐标系Z轴转动的的3个自由度。本发明的优点为在转动刚度、径向刚度、行程、转动精度上具有良好的综合性能。
权利要求
1.一种制造便捷的三维转动柔性机构,其特征在于:由上圆盘(1)、下圆盘(2)、外环(3)与设置在外环内部的内环(4),以及簧片(5)构成;上圆盘(1)与下圆盘(2)、外环(3)与内环(4)之间采用销钉、垫块或者螺钉进行安装;
上圆盘(1)和下圆盘(2)结构相同,下圆盘(2)的结构是上圆盘(1)绕Z轴转过180°的结构,上圆盘(1)和下圆盘(2)为一体成型件,是在一圆柱状材料上采用线切割技术切割制得;外环(3)和内环(4)为一体成型件,外环(3)和内环(4)是在内径不同的空心圆柱状材料上采用线切割技术切割制得,切割制得的内环(4)绕Z轴转过180°与外环(3)进行装配;该机构分别设有十个簧片、六个中间刚体、四个刚体;十个簧片是指A簧片(501)、B簧片(502)、C簧片(503)、D簧片(504)、E簧片(505)、F簧片(506)、G簧片(507)、H簧片(508)、I簧片(509)和J簧片(510),其中A~H簧片结构相同,I簧片和J簧片结构相同;六个中间刚体是指上圆盘静刚体(102)、下圆盘静刚体(202)、外环上刚体(301)、内环上刚体(401)、外环中间刚体(302)和内环中间刚体(402);六个中间刚体分别设置在四个刚体之间;四个刚体是指上圆盘动刚体(101)、下圆盘动刚体(201)、外环静刚体(303)、内环静刚体(403);
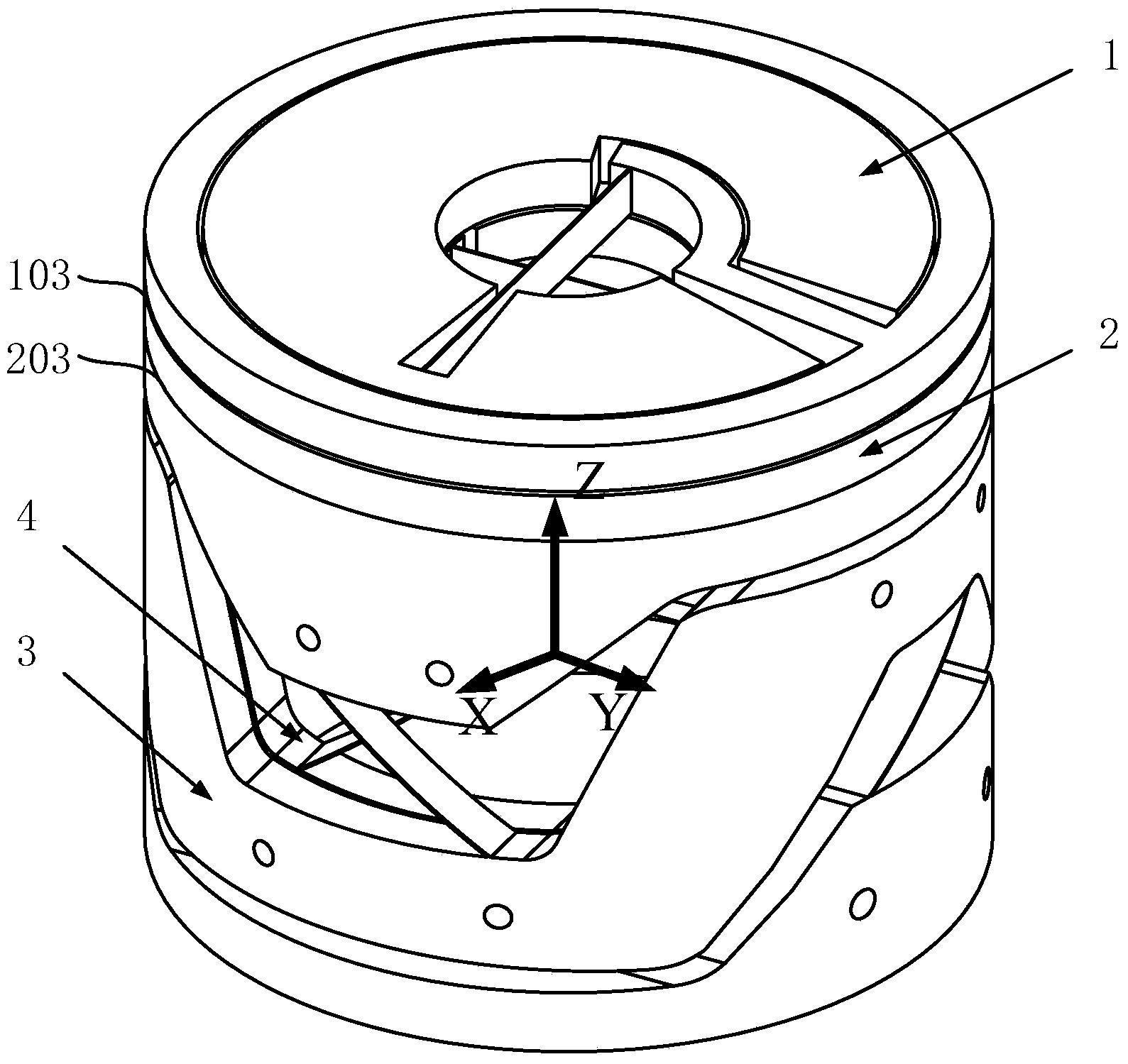
所述上圆盘(1)包括上圆盘动刚体(101)、上圆盘静刚体(102)、A切缝(103)与A切槽(104),上圆盘动刚体(101)与上圆盘静刚体(102)分别位于内和外两个位置;其中,上圆盘动刚体(101)与上圆盘静刚体(102)间通过I簧片(509)相连,使I簧片(509)具有绕空间直角坐标系O(x、y、z)中的竖轴Z转动的自由度;A切缝(103)将上圆盘(1)与下圆盘(2)分开;A切槽(104)将上圆盘动刚体(101)和上圆盘静刚体(102)分开;
所述下圆盘(2)包括下圆盘动刚体(201)、下圆盘静刚体(202)、B切缝(203)与B切槽(204),下圆盘动刚体(201)与下圆盘静刚体(202)分别位于内和外两个位置;其中,下圆盘动刚体(201)与下圆盘静刚体(202)间通过J簧片(510)相连,使J簧片(510)具有绕空间直角坐标系O(x、y、z)中的竖轴Z转动的自由度;B切缝(203)将下圆盘(2)与外环(3)和内环(4)分开;B切槽(204)将下圆盘动刚体(201)和下圆盘静刚体(202)分开;
所述外环(3)包括外环上刚体(301)、外环中间刚体(302)、外环静刚体(303)、C切槽(304)与D切槽(305),外环中间刚体(302)上端与外环上刚体(301)之间通过A簧片(501)和B簧片(502)相连,使A簧片(501)和B簧片(502)具有绕空间直角坐标系O(x、y、z)中横轴X转动的自由度;外环中间刚体(302)下端与外环静刚体(303)之间通过E簧片(505)和F簧片(506)相连,使E簧片(505)和F簧片(506)具有绕空间直角坐标系O(x、y、z)中纵轴Y转动的自由度;C切槽(304)将外环上刚体(301)与外环中间刚体(302)分开;D切槽(305)将外环中间刚体(302)与外环静刚体(303)分开;A簧片(501)和B簧片(502)的下板面与外环中间刚体(302)的上板面之间的夹角记为α,α=30°~60°;E簧片(505)和F簧片(506)的下板面与外环中间刚体(302)的上板面之间的夹角记为β,β=30°~60°;
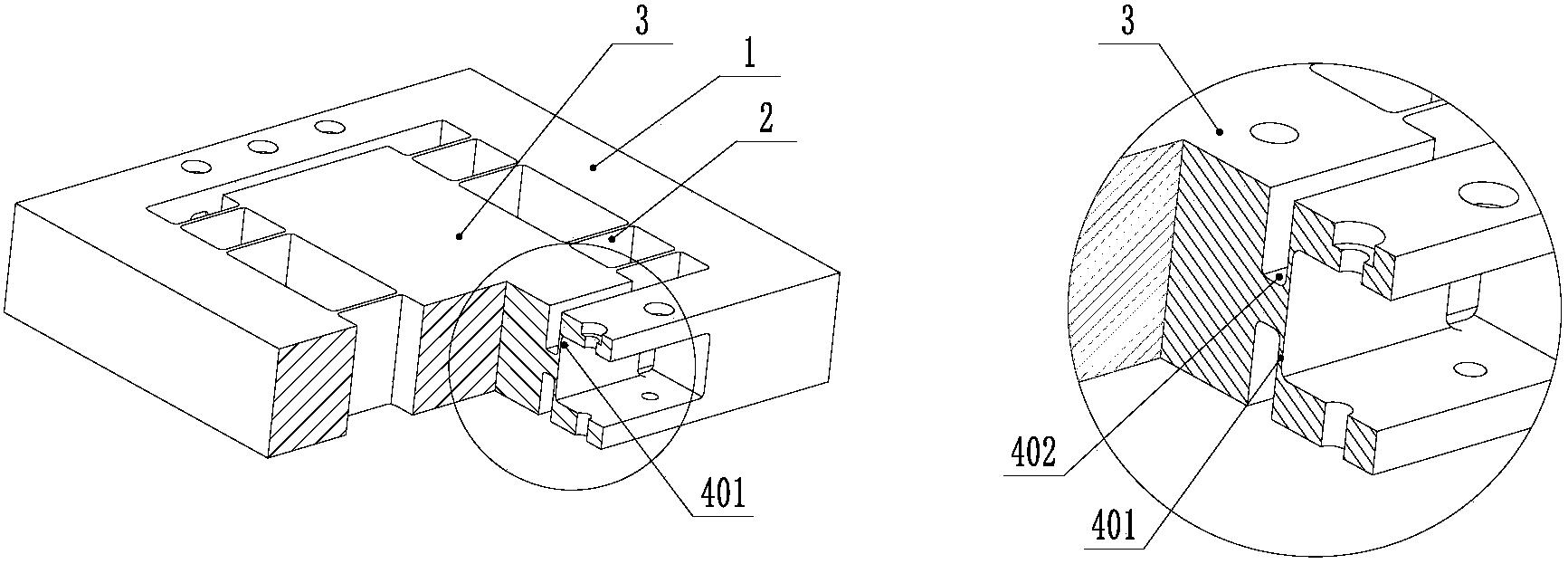
所述内环(4)包括内环上刚体(401)、内环中间刚体(402)、内环静刚体(403)、E切槽(404)与F切槽(405),内环中间刚体(402)上端与内环上刚体(401)之间通过C簧片(503)和D簧片(504)相连,使C簧片(503)和D簧片(504)具有绕空间直角坐标系O(x、y、z)中横轴X转动的自由度;内环中间刚体(402)下端与内环静刚体(403)之间通过G簧片(507)和H簧片(508)相连,使G簧片(507)和H簧片(508)具有绕空间直角坐标系O(x、y、z)中纵轴Y转动的自由度;E切槽(404)将内环上刚体(401)与内环中间刚体(402)分开;F切槽(405)将内环中间刚体(402)与内环静刚体(403)分开;C簧片(503)和D簧片(504)的下板面与内环中间刚体(402)的上板面之间的夹角记为α,α=30°~60°;E簧片(505)和F簧片(506)的下板面与内环中间刚体(402)的上板面之间的夹角记为β,β=30°~60°;
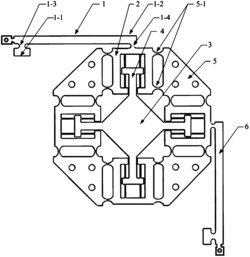
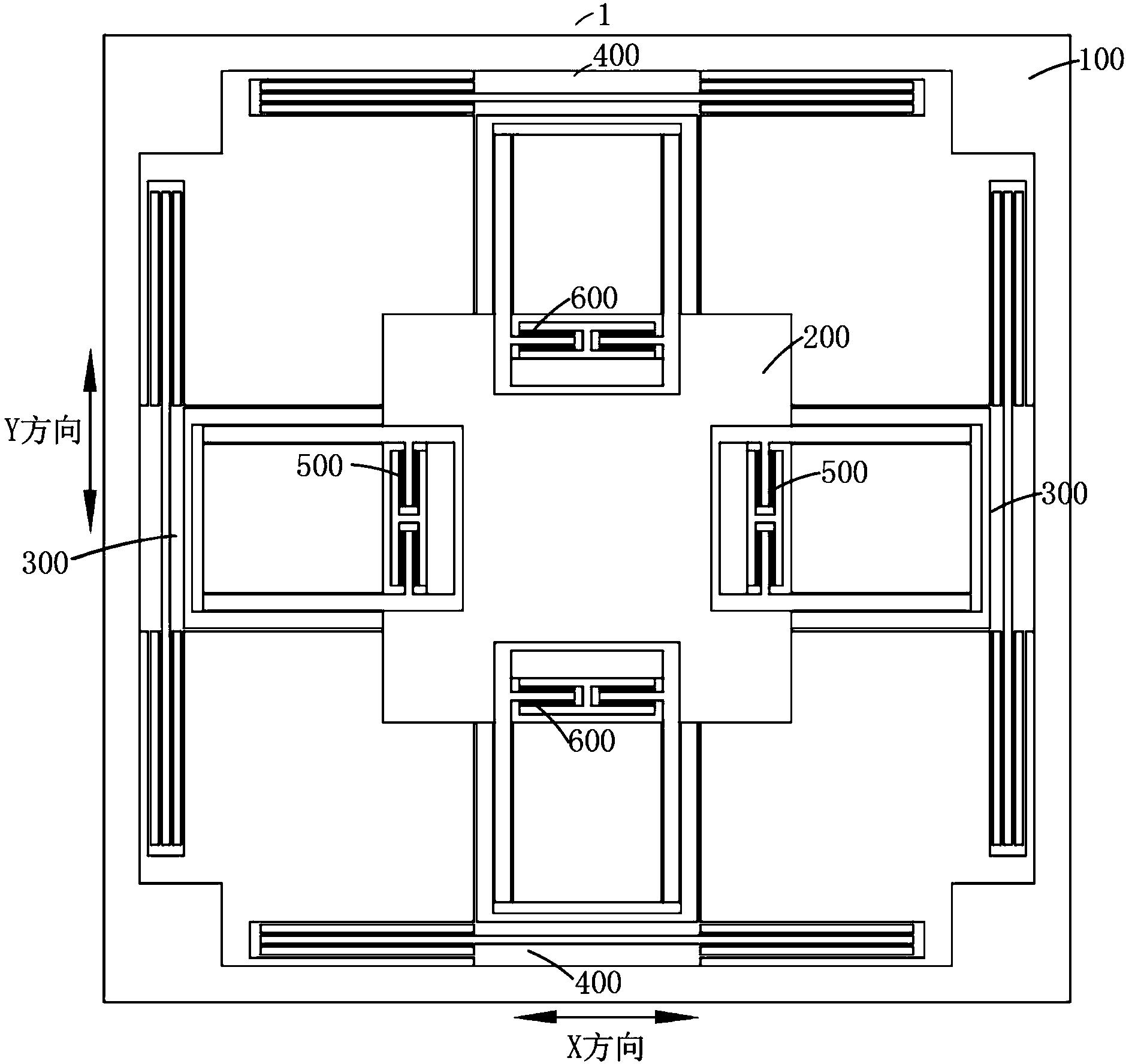
上述位于同侧的A簧片(501)与C簧片(503)间形成X型交叉簧片柔性机构;位于同侧的B簧片(502)与D簧片(504)间形成X型交叉簧片柔性机构;位于同侧的E簧片(505)与G簧片(507)间形成X型交叉簧片柔性机构;位于同侧的F簧片(506)与H簧片(508)间形成X型交叉簧片柔性机构;位于同侧的I簧片(509)与J簧片(510)形成X型交叉簧片柔性机构;
上述外环上刚体(301)与内环上刚体(401)径向间,以及外环静刚体(303)与内环静刚体(403)径向间定位装配;
上述上圆盘静刚体(102)与下圆盘静刚体(202)轴向间,上圆盘动刚体(101)与下圆盘动刚体(201)轴向间,以及下圆盘静刚体(202)与外环上刚体(301)轴向间加垫片定位装配。
2.如权利要求1所述一种制造便捷的三维转动柔性机构,其特征在于:在同一刚体中夹角α与夹角β的角度保持一致,且α=β=30°~60°。
3.如权利要求1所述一种制造便捷的三维转动柔性机构,其特征在于:所述A簧片(501)和B簧片(502)倾斜方向相同,且关于YOZ平面相互对称;C簧片(503)和D簧片(504)倾斜方向相同,且关于YOZ平面相互对称;E簧片(505)和F簧片(506)倾斜方向相同,且关于XOZ平面相互对称;G簧片(507)和H簧片(508)倾斜方向相同,且关于XOZ平面相互对称。
4.如权利要求1所述一种制造便捷的三维转动柔性机构,其特征在于:所述同侧的A簧片(501)与C簧片(503)在YOZ平面投影等长,B簧片(502)与D簧片(504)在YOZ平面投影等长,E簧片(505)与G簧片(507)在XOZ平面投影等长,F簧片(506)与H簧片(508)在XOZ平面投影等长,I簧片(509)与J簧片(510)等长。
5.如权利要求1所述一种制造便捷的三维转动柔性机构,其特征在于:所述三维转动柔性机构为圆柱体构型、正方体构型、长方体构型或者球体构型。
说明书
技术领域
本发明涉及一种柔性机构。属于精密定位领域,具体来说,是一种制造便捷的具有大变形、高精度的三维转动柔性机构。
背景技术
柔性机构是指在外部载荷的作用下,利用材料的弹性变形在相邻刚体间传递力和能量,从而产生相对平移或转动的一种结构形式。与传统的刚性机构相比,柔性机构由一块材料整体切割而成,其利用材料的弹性变形产生旋转运动,与传统转动单元相比不需装配没有间隙和摩擦,因此能实现更高的转动精度,同时避免磨损,提高寿命,免于润滑,避免污染。可应用于各种精密定位以及为姿态调整等领域。
三维转动柔性机构具有大变形、高精度等特点,有着较大的应用需求。然而现有三维转动机构或为缺口型,精度不高,行程小;或为并联柔性机构,结构复杂,装配误差大。
发明内容
本发明针对现有三维转动机构类型单一,转动刚度、径向刚度、行程、转动精度等综合性能有待提高,装配误差大的问题,提出了一种制造便捷的三维转动柔性机构,由3套柔性机构构成,包括2套空间交错柔性机构和1套内外环柔性机构。通过两套空间交错柔性机构和一套内外环柔性机构串联而成,具有行程大、精度高的优点。
本发明的优点在于。
1、上圆盘与下圆、外环和内环盘采用绕Z轴转过180°结构相同的设计,通过簧片在空间交叉但并不在交叉点处固定的设计,使得机构的内应力减小,寿命提高。
2、上圆盘与下圆盘、下圆盘与外环上刚体、外环与内环的结合处采用螺钉与垫块的连接形式,提高了三维转动柔性机构的刚度,使承载能力加强,固有频率增加。
3、采用线切割以及钻铣工艺一体化,减少装配误差。
4、本发明设计的机构为中空结构,利于减轻重量,并且易于加工。
5、本发明设计的三维转动柔性机构在转动刚度、径向刚度、行程、转动精度上具有良好的综合性能。
附图说明
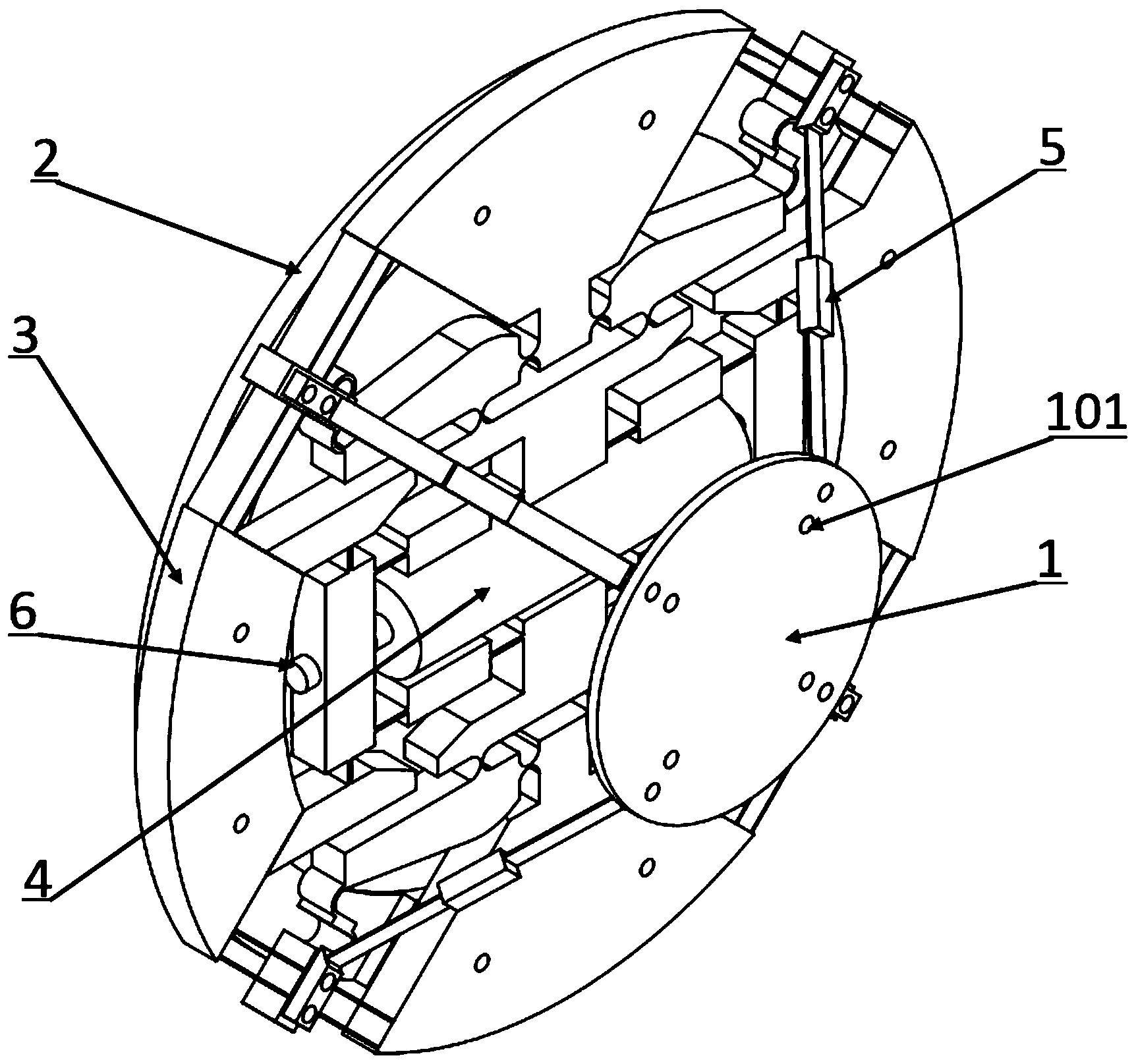
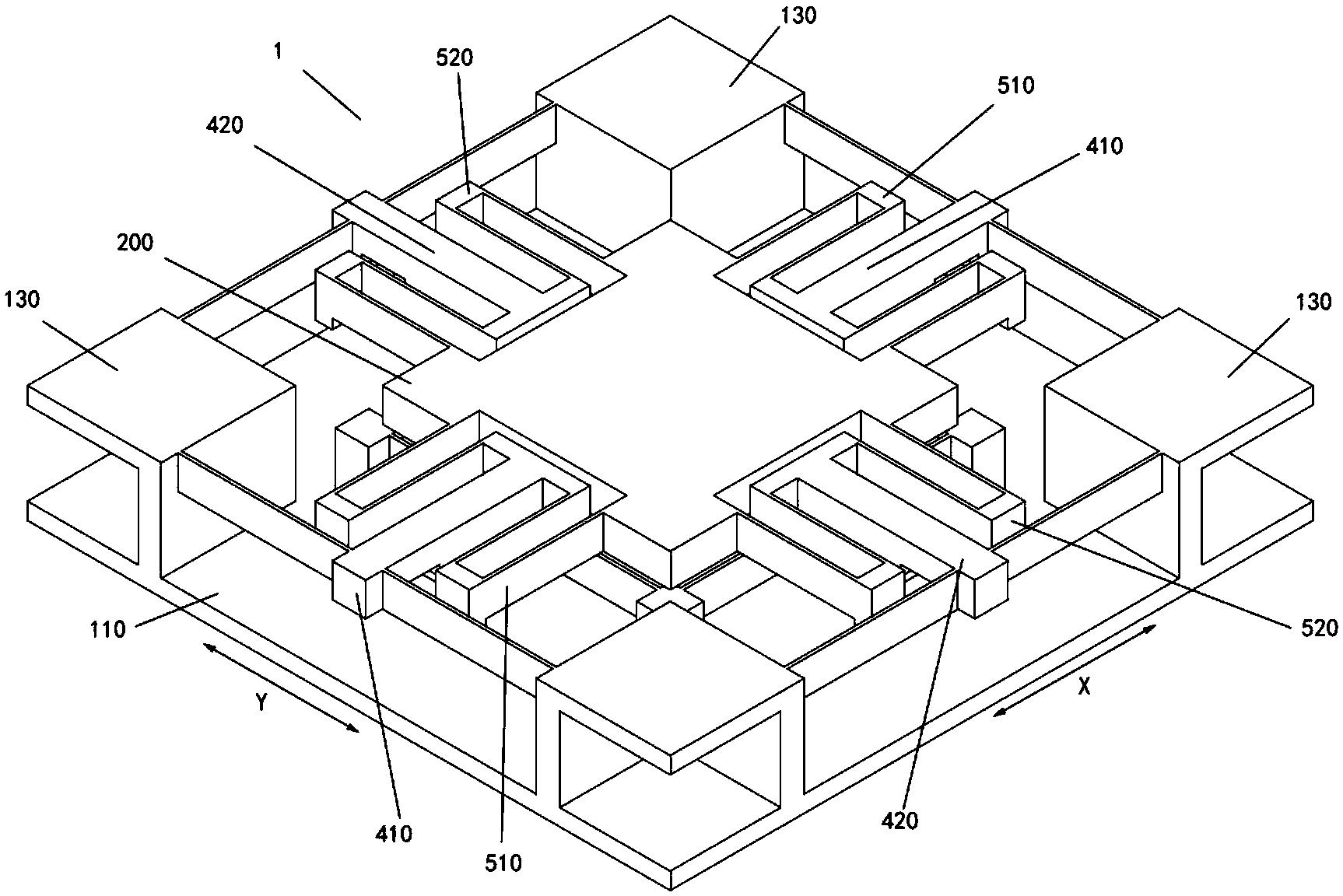
图1为本发明三维转动柔性机构整体结构示意图1。
图2位本发明三维转动柔性机构整体结构示意图2。
图3为本发明三维转动柔性机构装配爆炸图。
图4为本发明三维转动柔性机构正视图。
图5为本发明三维转动柔性机构右视图。
图中。
1-上圆盘 2-下圆盘 3-外环
4-内环 5-簧片 6-定位销钉
101-上圆盘动刚体 102-上圆盘静刚体 103-A切缝
104-A切槽201-下圆盘动刚体 202-下圆盘静刚体
203-B切缝204-B切槽301-外环上刚体
302-外环中间刚体 303-外环静刚体 304-C切槽
305-D切槽401-内环上刚体 402-内环中间刚体
403-内环静刚体 404-E切槽405-F切槽
501-簧片A502-簧片B503-簧片C
504-簧片D505-簧片E506-簧片F
507-簧片G508-簧片H509-簧片I
510-簧片J
具体实施方式
下面结合附图对本发明作进一步说明。
本发明一种制造便捷的三维转动柔性机构,由上圆盘1、下圆盘2、外环3与设置在外环3内部的内环4,以及簧片5构成;所述外环3包括外环上刚体301、外环中间刚体302、外环静刚体303、C切槽304和D切槽305;所述设置在外环3内部的内环4包括内环上刚体401、内环中间刚体402、内环静刚体403、E切槽404和F切槽405;外环3与内环4是一体化切割加工完成,再将内环4沿Z轴旋转180°与外环3通过销钉固定。本发明的三维转动柔性机构具有一个虚拟的转动中心,其位于A簧片501与C簧片503、E簧片505与G簧片507、I簧片509与J簧片510的交点O上,在O点建立XYZ坐标系。在坐标系XYZ中,外环静刚体303与内环静刚体403静止不动;外环中间刚体302和内环中间刚体402可绕X轴转动,其最大行程为±4°的一维转动运动;外环上刚体301和内环上刚体401可绕Y轴转动,其最大行程为±4°的一维转动运动;上圆盘动刚体101可绕Z轴转动,其最大行程为±4°的一维转动运动。3种转动运动相互串联构成本三维转动柔性机构。
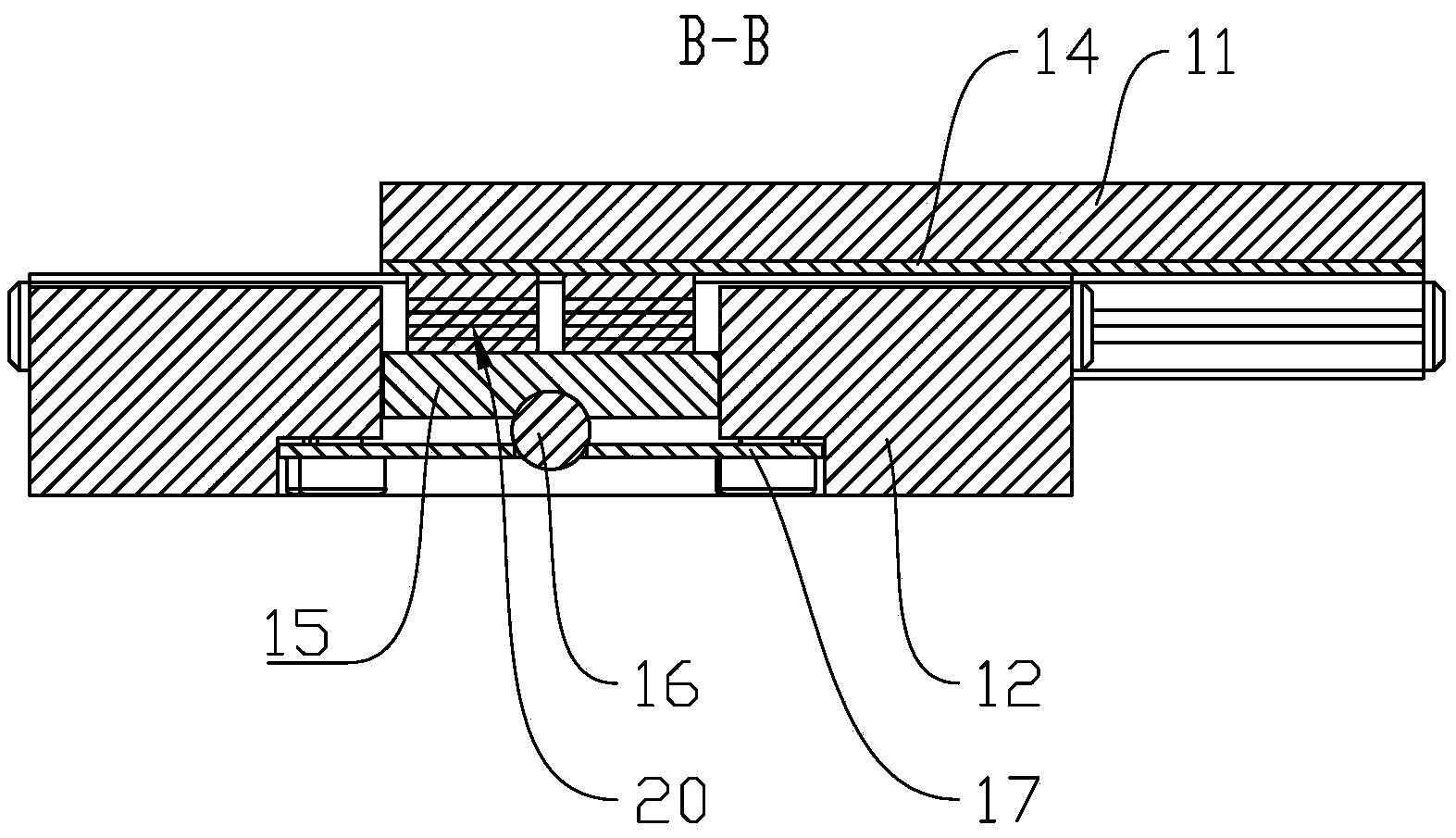
所述上圆盘1包括上圆盘动刚体101、上圆盘静刚体102、A切缝103与A切槽104,上圆盘动刚体101与上圆盘静刚体102分别位于内和外两个位置;其中,上圆盘动刚体101与上圆盘静刚体102间通过簧片5相连,令此连接用簧片5为I簧片509;使I簧片509具有绕空间直角坐标系O(x、y、z)中的竖轴Z转动的自由度;所述下圆盘包括下圆盘动刚体201、下圆盘静刚体202、B切缝203与B切槽204,下圆盘动刚体201与下圆盘静刚体202分别位于内和外两个位置;其中,下圆盘动刚体201与下圆盘静刚体202间通过簧片5相连,令此连接用簧片5为J簧片510;使J簧片510具有绕空间直角坐标系O(x、y、z)中的竖轴Z转动的自由度;上述上圆盘动刚体101内侧与上圆盘静刚体102外侧间存在间隙,下圆盘动刚体201内侧与下圆盘静刚体202外侧间存在间隙,间隙在I簧片509与J簧片510不超过其屈服强度的转角范围内尽可能小;各簧片的长度和它们之间的夹角影响机构的运动范围、柔度以及运动精度等特性;各簧片的厚度影响机构的行程、柔度和寿命。
所述外环3包括外环上刚体301、外环中间刚体302、外环静刚体303、C切槽304与D切槽305,外环中间刚体302上端与外环上刚体301之间通过A簧片501和B簧片502相连,A簧片501和B簧片502相连倾斜方向相同,且关于YOZ平面相互对称;外环中间刚体302下端与外环静刚体303之间通过E簧片505和F簧片506相连,E簧片505和F簧片506倾斜方向相同,且关于XOZ平面相互对称;使A簧片501和B簧片502具有绕空间直角坐标系O(x、y、z)中横轴X转动的自由度;使E簧片505和F簧片506具有绕空间直角坐标系O(x、y、z)中纵轴Y转动的自由度;C切槽304将外环上刚体301与外环中间刚体302分开;D切槽305将外环中间刚体302与外环静刚体303分开;A簧片501和B簧片502的下板面与外环中间刚体302的上板面之间的夹角记为α,α=30°~60°;E簧片505和F簧片506的下板面与外环中间刚体302的上板面之间的夹角记为β,β=30°~60°。上述外环上刚体301底面与外环中间刚体302顶面间存在间隙,外环中间刚体302底面与外环静刚体303顶面间存在间隙,间隙在E簧片505和F簧片506不超过其屈服强度的转角范围内尽可能大;各簧片的长度和它们之间的夹角影响机构的运动范围、柔度以及运动精度等特性;各簧片的厚度影响机构的行程、柔度和寿命。
所述内环4与外环3结构类似,包括内环上刚体401、内环中间刚体402、内环静刚体403、E切槽404与F切槽405,内环中间刚体402上端与内环上刚体401之间通过C簧片503和D簧片504相连,C簧片503和D簧片504倾斜方向相同,且关于YOZ平面相互对称,内环中间刚体402下端与内环静刚体403之间通过G簧片507和H簧片508相连;使C簧片503和D簧片504具有绕空间直角坐标系O(x、y、z)中横轴X转动的自由度;使G簧片507和H簧片508具有绕空间直角坐标系O(x、y、z)中纵轴Y转动的自由度;E切槽404将内环上刚体401与内环中间刚体402分开;F切槽405将内环中间刚体402与内环静刚体403分开;C簧片503和D簧片504的下板面与内环中间刚体402的上板面之间的夹角记为α,α=30°~60°;E簧片505和F簧片506的下板面与内环中间刚体402的上板面之间的夹角记为β,β=30°~60°;上述内环上刚体401底面与内环中间刚体402顶面间存在间隙,内环中间刚体402底面与内环静刚体403顶面间存在间隙,间隙在G簧片506和H簧片508不超过其屈服强度的转角范围内尽可能大;各簧片的长度和它们之间的夹角影响机构的运动范围、柔度以及运动精度等特性;各簧片的厚度影响机构的行程、柔度和寿命。
上述位于同侧的A簧片501与C簧片503间具有一定间隙,轴线相互交叉形成X型交叉簧片柔性机构;位于同侧的B簧片502与D簧片504间具有一定间隙,轴线相互交叉形成X型交叉簧片柔性机构;位于同侧的E簧片505与G簧片507间具有一定间隙,轴线相互交叉形成X型交叉簧片柔性机构;位于同侧的F簧片506与H簧片508间具有一定间隙,轴线相互交叉形成X型交叉簧片柔性机构;位于同侧的I簧片509与J簧片510间具有一定间隙,轴线相互交叉形成X型交叉簧片柔性机构。各簧片的长度和它们之间的夹角影响机构的运动范围、柔度以及运动精度等特性;各簧片的厚度影响机构的行程、柔度和寿命。
在本发明中,A切缝103将上圆盘1与下圆盘2分开。
在本发明中,B切缝203将下圆盘2与内环上刚体301和外环上刚体401分开。
A切缝103与B切缝203为直线,这两条切缝由切割机床分两次加工完成。
上述上圆盘静刚体102、下圆盘静刚体202与外环上刚体301轴向间,内环上刚体401与外环上刚体301径向间,以及内环静刚体403与外环静刚体303径向间,通过定位销钉定位装配,实现内环4与外环3间的定位,使内环上刚体401、内环中间刚体402、内环静刚体403分别和外环上刚体301、外环中间刚体302、外环静刚体303间形成整体的柔性机构动刚体、柔性机构上刚体、柔性机构下刚体与柔性机构静刚体,形成本发明三维转动柔性机构。
对于上述结构三维转动柔性机构来说,柔性机构动刚体相对柔性机构静刚体具有绕横轴X转动和绕纵轴Y转动以及绕竖轴Z转动的3个自由度。通过E簧片505、F簧片506、G簧片507和H簧片508的连接方式,使柔性机构下刚体相对柔性机构静刚体具有绕纵轴Y转动的1个自由度;通过A簧片501、B簧片502、C簧片503和D簧片504的连接方式,使柔性机构动刚体相对柔性机构下刚体具有绕横轴X转动的1个自由度;通过I簧片509与J簧片510的连接方式,使柔性机构动刚体相对柔性机构上刚体具有绕竖轴Z转动的1个自由度。
本发明所设计的三维转动柔性机构是一种制造便捷的机构,是一体化设计与加工,其加工方式主要为线切割以及钻铣工艺一体化技术,可减少装配误差。其加工方法如下:净测环身、齐高,通过线切割切出从中间切出B切缝203将胚料分为两半;通过线切割将上胚料切出A切槽104形成I簧片509和J簧片510,从中间切出A切缝103,从而得到上圆盘1和下圆盘2;通过线切割将下胚料去中心通孔,分两次切内外环间隙,切断之前加销钉;通过线切割将前后面切出C切槽304以及销钉孔,左右面切出D切槽305以及销钉孔得到内环4和外环3;将销钉卸下,内环4抽出并旋转180°装入内环,上圆盘翻转180°,销钉装入。至此完成本发明三维转动柔性机构的加工与装配过程。
在本发明图1所示的三维转动柔性机构为圆柱体构型,也可以根据实际需要设计成正方体、长方体或者球状等构型。
一种制造便捷的三维转动柔性机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0