







专利摘要
本实用新型涉及一种点头鸭式波浪发电模拟系统,包括造浪装置、波浪检测装置和点头鸭波浪能量转换装置;造浪装置包括蓄水槽、驱动装置和造波板;造波板垂直设置在蓄水槽的第一端,且造波板与驱动装置机械连接;驱动装置用于驱动造波板沿水平方向在所述蓄水槽内做周期往复的运动;波浪检测装置固定于蓄水槽的上端,用于检测蓄水槽内的波浪的波长和波幅;点头鸭波浪能量转换装置设置在蓄水槽的第二端,用于捕获蓄水槽中的波浪能,并将波浪能转换为电能。上述点头鸭式波浪发电模拟系统可检测蓄水槽内的波浪的波长和波幅,实现对波长和波幅的实时监测,从而研究不同波长和波幅对发电效率的影响。
权利要求
1.一种点头鸭式波浪发电模拟系统,其特征在于,包括造浪装置、波浪检测装置和点头鸭波浪能量转换装置;
所述造浪装置包括蓄水槽、驱动装置和造波板;所述造波板垂直设置在所述蓄水槽的第一端,且所述造波板与所述驱动装置机械连接;所述驱动装置用于驱动所述造波板沿水平方向在所述蓄水槽内做周期往复的运动;
所述波浪检测装置固定于所述蓄水槽的上端,用于检测所述蓄水槽内的波浪的波长和波幅;
所述点头鸭波浪能量转换装置设置在所述蓄水槽的第二端,用于捕获所述蓄水槽中的波浪能,并将波浪能转换为电能。
2.根据权利要求1所述的点头鸭式波浪发电模拟系统,其特征在于,所述驱动装置包括电机驱动、气压驱动或液压驱动。
3.根据权利要求1所述的点头鸭式波浪发电模拟系统,其特征在于,所述波浪检测装置包括第一浮子、第一导轨、第一超声波测距模块、第二浮子、第二导轨和第二超声波测距模块;所述第一超声波测距模块和所述第二超声波测距模块分别连接上位机,且所述第一超声波测距模块与所述第一导轨固定连接,所述第二超声波测距模块与所述第二导轨固定连接;所述第一浮子与所述第一导轨活动连接,所述第二浮子与所述第二导轨活动连接。
4.根据权利要求1所述的点头鸭式波浪发电模拟系统,其特征在于,所述点头鸭波浪能量转换装置包括鸭体和发电传动装置;所述鸭体与所述发电传动装置机械连接;所述鸭体用于将所述蓄水槽内的波浪能转换为机械能,所述发电传动装置用于将所述机械能转换为电能。
5.根据权利要求4所述的点头鸭式波浪发电模拟系统,其特征在于,所述发电传动装置包括旋转轴、变速箱、第一发电机和第二发电机;所述变速箱固定于所述旋转轴上,并与所述鸭体机械连接;所述第一发电机、所述第二发电机分别与所述变速箱机械连接,用于将机械能转换为电能。
6.根据权利要求5所述的点头鸭式波浪发电模拟系统,其特征在于,所述变速箱的齿轮比设置为1:30。
7.根据权利要求4所述的点头鸭式波浪发电模拟系统,其特征在于,所述点头鸭波浪能量转换装置还包括重心调节装置,所述重心调节装置固定于所述鸭体上,用于调节所述鸭体的重心位置。
8.根据权利要求4所述的点头鸭式波浪发电模拟系统,其特征在于,所述点头鸭波浪能量转换装置还包括升降杆,所述升降杆与所述鸭体滑动连接,用于调节所述鸭体沿竖直方向上的位置。
9.根据权利要求1至8任一项所述的点头鸭式波浪发电模拟系统,其特征在于,还包括消波装置,所述消波装置分别设置在所述蓄水槽的第一端和第二端,用于稳定所述蓄水槽内的波浪波形。
说明书
技术领域
本实用新型涉及可再生能源技术领域,特别是涉及一种点头鸭式波浪发电模拟系统。
背景技术
海水中蕴藏着巨大的波浪能,全球可利用的波浪能高达20×109kW。在当前能源危机的大背景下,世界各海洋大国均十分重视波浪能的研究利用,尤其是波浪能发电系统的研究开发。波浪能采集装置是波浪能发电系统中最关键的部分,在众多类型的波浪能采集装置中,由英国爱丁堡大学Salter教授提出的点头鸭式波浪能采集装置以其设计精巧、采能高效而著称,作为目前世界上效率最高的波浪能采集技术,其应用前景十分广阔。
目前,一些国内外学者已对点头鸭式波浪能采集装置进行了研究。Mynett等对二维正弦波中运行的点头鸭装置特性进行了分析,认为在理想运行条件下,点头鸭波浪能采集装置的波浪能转换效率接近90%。Serman等对不规则波作用下的“点头鸭”性能进行了研究,结果表明,在不规则波作用下该波浪能采集装置的效率要低很。
传统的针对不规则波作用下该波浪能采集装置的效率的研究大多关注波浪的攻角变化对波浪能转换效率的影响,而研究波浪的波长和波幅变化对点头鸭式波浪发电装置的发电效率进行综合分析较少。
实用新型内容
基于此,有必要提供一种研究波浪的波长和波幅对发电效率的影响的点头鸭式波浪发电模拟系统。
一种点头鸭式波浪发电模拟系统,包括造浪装置、波浪检测装置和点头鸭波浪能量转换装置;
所述造浪装置包括蓄水槽、驱动装置和造波板;所述造波板垂直设置在所述蓄水槽的第一端,且所述造波板与所述驱动装置机械连接;所述驱动装置用于驱动所述造波板沿水平方向在所述蓄水槽内做周期往复的运动;
所述波浪检测装置固定于所述蓄水槽的上端,用于检测所述蓄水槽内的波浪的波长和波幅;
所述点头鸭波浪能量转换装置设置在所述蓄水槽的第二端,用于捕获所述蓄水槽中的波浪能,并将波浪能转换为电能。
在其中一个实施例中,所述驱动装置包括电机驱动、气压驱动或液压驱动。
在其中一个实施例中,所述波浪检测装置包括第一浮子、第一导轨、第一超声波测距模块、第二浮子、第二导轨和第二超声波测距模块;所述第一超声波测距模块和所述第二超声波测距模块分别连接上位机,且所述第一超声波测距模块与所述第一导轨固定连接,所述第二超声波测距模块与所述第二导轨固定连接;所述第一浮子与所述第一导轨活动连接,所述第二浮子与所述第二导轨活动连接。
在其中一个实施例中,所述点头鸭波浪能量转换装置包括鸭体和发电传动装置;所述鸭体与所述发电传动装置机械连接;所述鸭体用于将所述蓄水槽内的波浪能转换为机械能,所述发电传动装置用于将所述机械能转换为电能。
在其中一个实施例中,所述发电传动装置包括旋转轴、变速箱、第一发电机和第二发电机;所述变速箱固定于所述旋转轴上,并与所述鸭体机械连接;所述第一发电机、所述第二发电机分别与所述变速箱机械连接,用于将机械能转换为电能。
在其中一个实施例中,所述变速箱的齿轮比设置为1:30。
在其中一个实施例中,所述点头鸭波浪能量转换装置还包括重心调节装置,所述重心调节装置固定于所述鸭体上,用于调节所述鸭体的重心位置。
在其中一个实施例中,所述点头鸭波浪能量转换装置还包括升降杆,所述升降杆与所述鸭体滑动连接,用于调节所述鸭体沿竖直方向上的位置。
在其中一个实施例中,所述点头鸭式波浪发电模拟装置还包括消波装置,所述消波装置分别设置在所述蓄水槽的第一端和第二端,用于稳定所述蓄水槽内的波浪波形。
上述点头鸭式波浪发电模拟系统中,在蓄水槽的上端设置了波浪检测装置,该波浪检测装置可检测蓄水槽内的波浪的波长和波幅,实现对波长和波幅的实时监测,从而研究不同波长和波幅对发电效率的影响。
附图说明
图1为第一个实施例中的点头鸭式波浪发电模拟系统的结构示意图;
图2为一个实施例中的造浪装置的造波原理示意图;
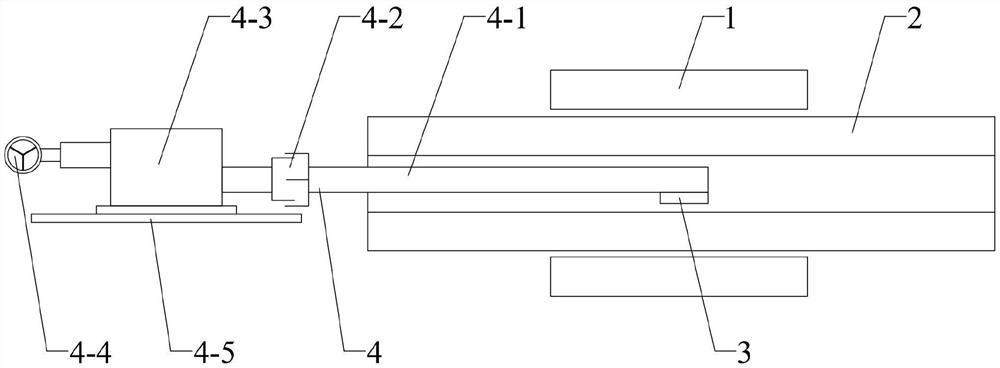
图3为一个实施例中的波浪检测装置的结构示意图;
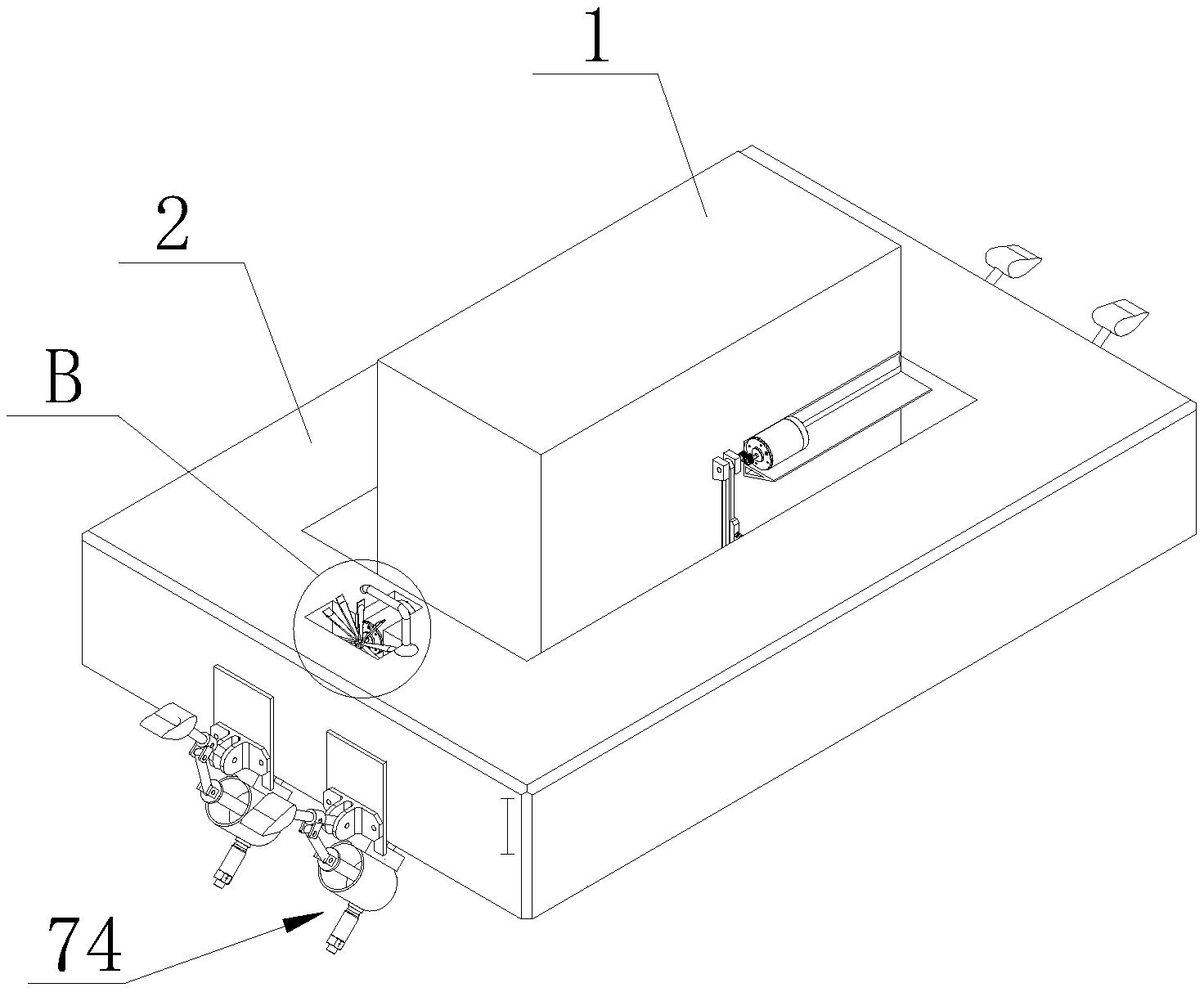
图4为第一个实施例中的点头鸭波浪能量转换装置的结构示意图;
图5为一个实施例中的发电传动装置的结构示意图;
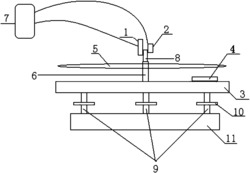
图6为第二个实施例中的点头鸭波浪能量转换装置的结构示意图;
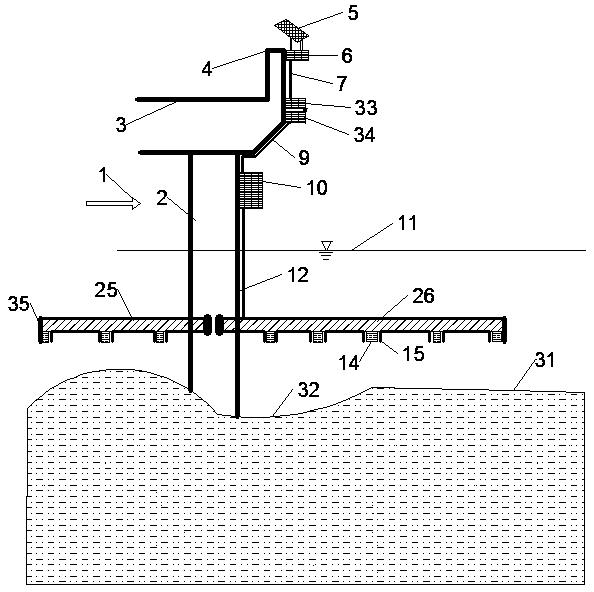
图7为第二个实施例中的点头鸭式波浪发电模拟系统的结构示意图。
具体实施方式
为了便于理解本申请,下面将参照相关附图对本申请进行更全面的描述。附图中给出了本申请的较佳实施例。但是,本申请可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容理解的更加透彻全面。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平”的、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
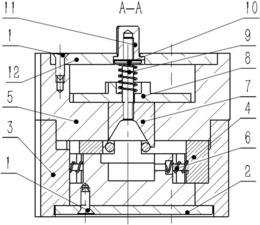
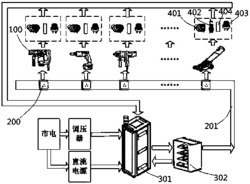
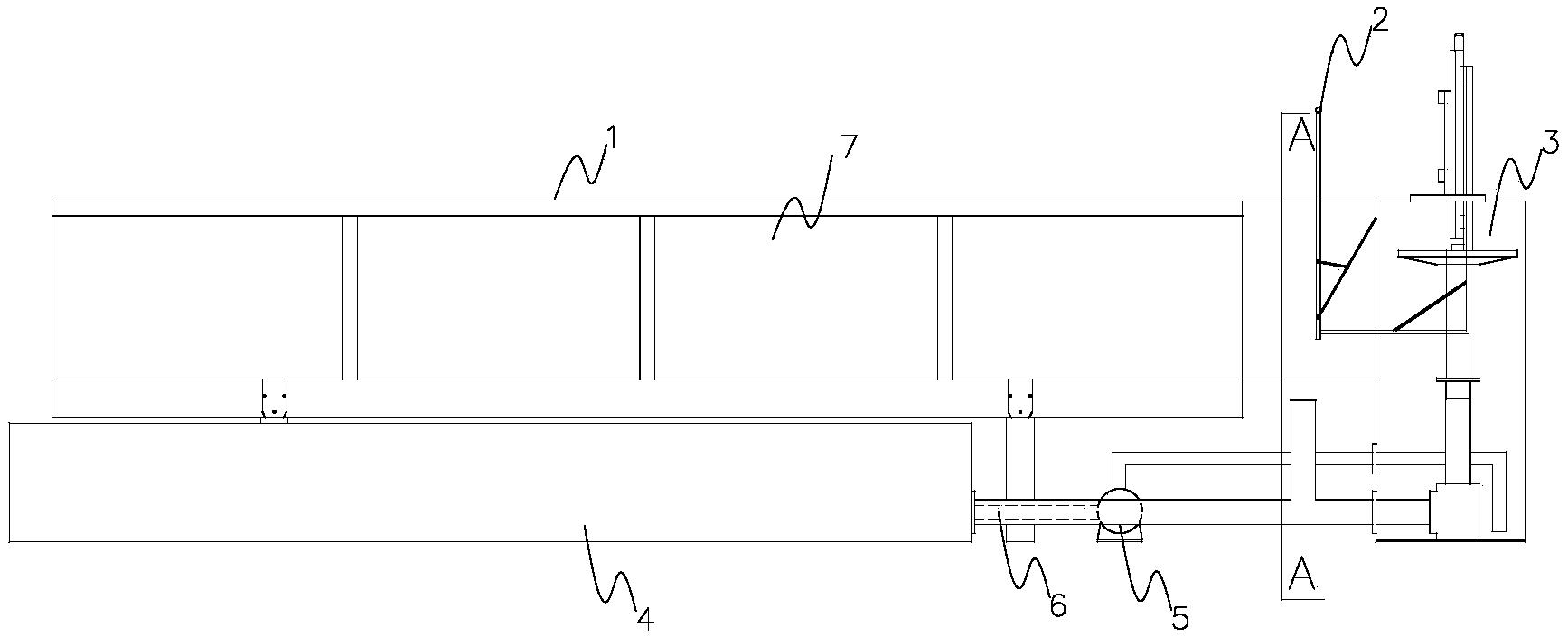
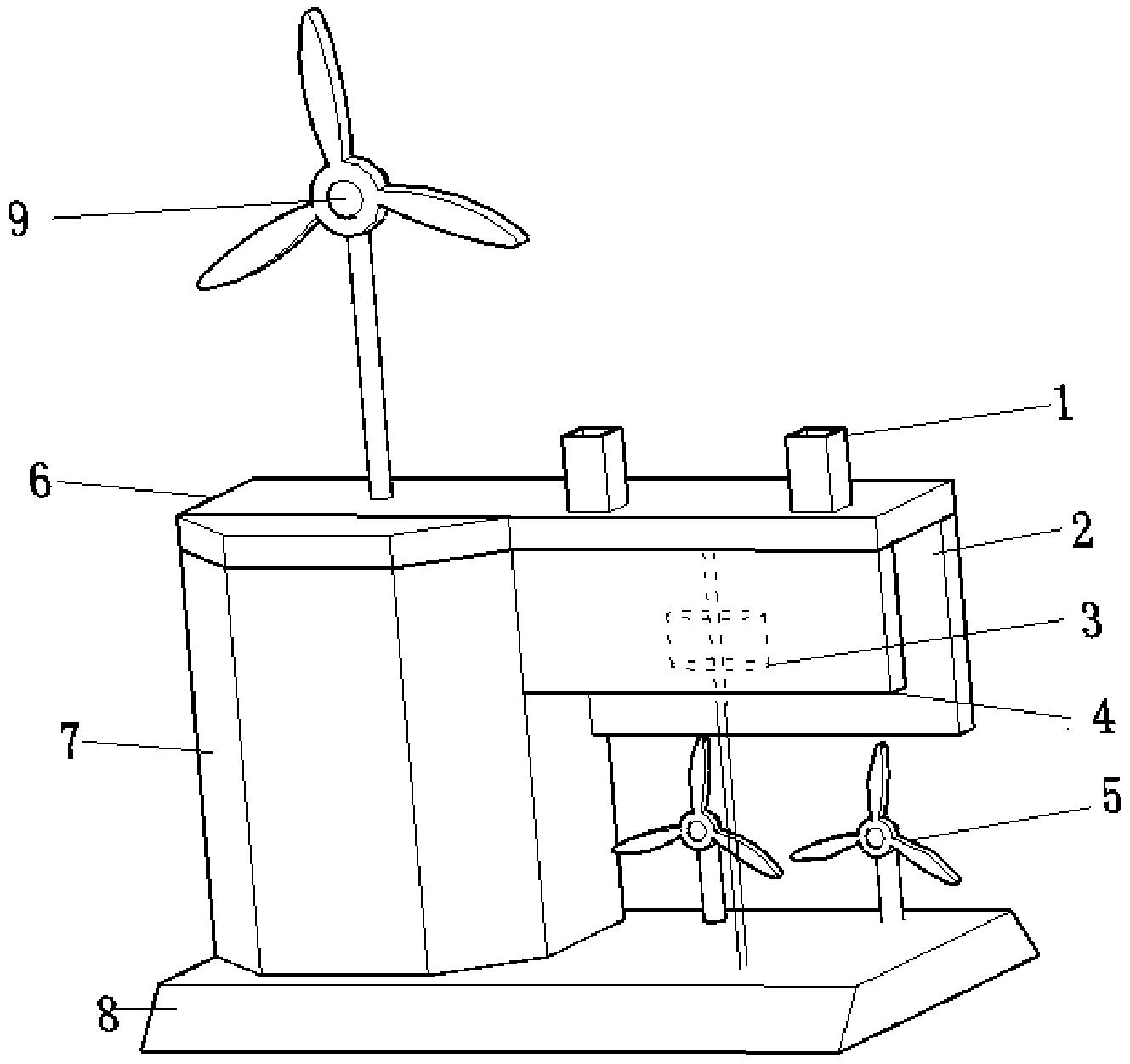
如图1所示,一种点头鸭式波浪发电模拟系统,包括造浪装置100、波浪检测装置200和点头鸭波浪能量转换装置300。其中,该造浪装置100包括蓄水槽 110、驱动装置120和造波板130,该造波板130垂直设置在蓄水槽110的第一端,且造波板130与驱动装置120机械连接;该驱动装置120用于驱动造波板 130沿水平方向在蓄水槽110内做周期往复的运动;该波浪检测装置200固定于蓄水槽110的上端,用于检测蓄水槽110内的波浪的波长和波幅;该点头鸭波浪能量转换装置300设置在蓄水槽110的第二端,用于捕获蓄水槽中的波浪能,并将波浪能转换为电能。
本实施例中,为研究不同波长和波幅对发电效率的影响,建立了造浪装置 100、波浪检测装置200和点头鸭波浪能量转换装置300的模拟系统,采用波浪检测装置200对造浪装置100进行了数据采集(即波浪的波长和波幅数据),通过点头鸭波浪能量转换装置300将波浪能转换为电能,从而研究不同波长和波幅对能量转换效率(及发电效率)的影响。
应当理解地是,本申请在于制备出具有高转化效率和较高稳定性波浪发电装置,实现对系统的波长,波幅,发电效率等各项参数均有相应表征,确保在不同的波形下获得较高的能量转化效率。
在一个实施例中,驱动装置120包括电机驱动、气压驱动或液压驱动。
其中,电机驱动具有:体积小,电机启动容易,控制性能好,快速响应能力强且无污染等优点。电机驱动和其它形式相比,在高速、高精度、小型节能方面更能满足要求,因而在轻载情况下,采用电机驱动的系统比较多。
其中,气压驱动是以空气为介质,相应速度快,且空气可直接从大气中获得,又可排放到大气中,不需要回流系统,与液压系统相比,气动系统构成简单、价格便宜,但工作压力低,因而承受能力低,定位刚度也低。工作载荷在几百牛顿时,启动系统比较有效。
其中,液压驱动虽然油液易泄漏,但输出力矩大,负载能力强,一个体积与能搬送14~23kg载荷低气动或电动系统相当低液压系统,就可搬送130~ 140kg的负载,而且还有电动系统相当低精度和响应速度。另一方面,液压系统的油液能起到对运动部件润滑的作用,并通过油液低流动把热量带走,实现系统低自冷却,以延长元件和系统的使用寿命。采用液压驱动机构还可以得到很大的速度范围,其低速特性比电动机要好,当液压执行器泄漏较小时,液压弹簧刚度大,因而闭环系统的定位刚度较大,位置误差比较小。另外,利用液压系统的集成回路可以把液压系统设计得相当紧凑,减少系统所占空间。
具体地,如图1和图2所示,图2为造浪装置100的造波原理示意图。其中,驱动装置120推动造波板130做周期性的左右推动运动,生成正弦波列。可以理解地,通过单片机控制驱动装置120(例如步进电机)的冲程、推板吃水深度以及频率可以造出不同的波形,即具有不同波长和波幅的波浪。
在一个实施例中,如图1和图3所示,波浪检测装置200包括第一浮子210A、第一导轨220A、第一超声波测距模块230A、第二浮子210B、第二导轨220B 和第二超声波测距模块230B。其中,第一超声波测距模块230A和第二超声波测距模块230B分别连接上位机(图1和3未显示),且第一超声波测距模块230A 与第一导轨220A固定连接,第二超声波测距模块230B与第二导轨220B固定连接;第一浮子210A与第一导轨220A活动连接,第二浮子210B与第二导轨 220B活动连接。
本实施例中,为了测量波浪的波长和振幅,利用光电门的工作原理,在波面上放置了两个浮子,并运用超声波测距模块分别(第一超声波测距模块230A 和第二超声波测距模块230B)对浮子(第一浮子210A和第二浮子210B)进行实时对焦,并将信号传送到上位机,通过Labview人机交互界面将波浪的波长和振幅读出。
需要说明的是,波浪的波幅可通过检测超声波测距模块与浮子的距离得出,在此不再赘述。
对于检测波浪的波长可通过对单个浮子的突变信号进行处理可以得到波浪周期T,通过对双浮子的信号处理并结合如下公式:
其中,λ为波浪的波长,v0为波速(m/s),f为频率,t1为第一浮子210A 到最高位置时的时间信号,t2为第二浮子210B到最高位置时的时间信号,S为第一浮子210A和第二浮子210B之间的水平距离。
为了量化时间信号,可结合第一超声波测距模块230A和第二超声波测距模块230B采集数据的最小单位时间t0和采集点的个数n、m来计算波长,即波长表示为:
其中,n为第一浮子210A两次达到最高值中间所采集的数据点个数;m为在第一浮子210A第一次达到最高值所采集的数据点个数与第二浮子210B第一次达到最高所采集的数据点个数之差。
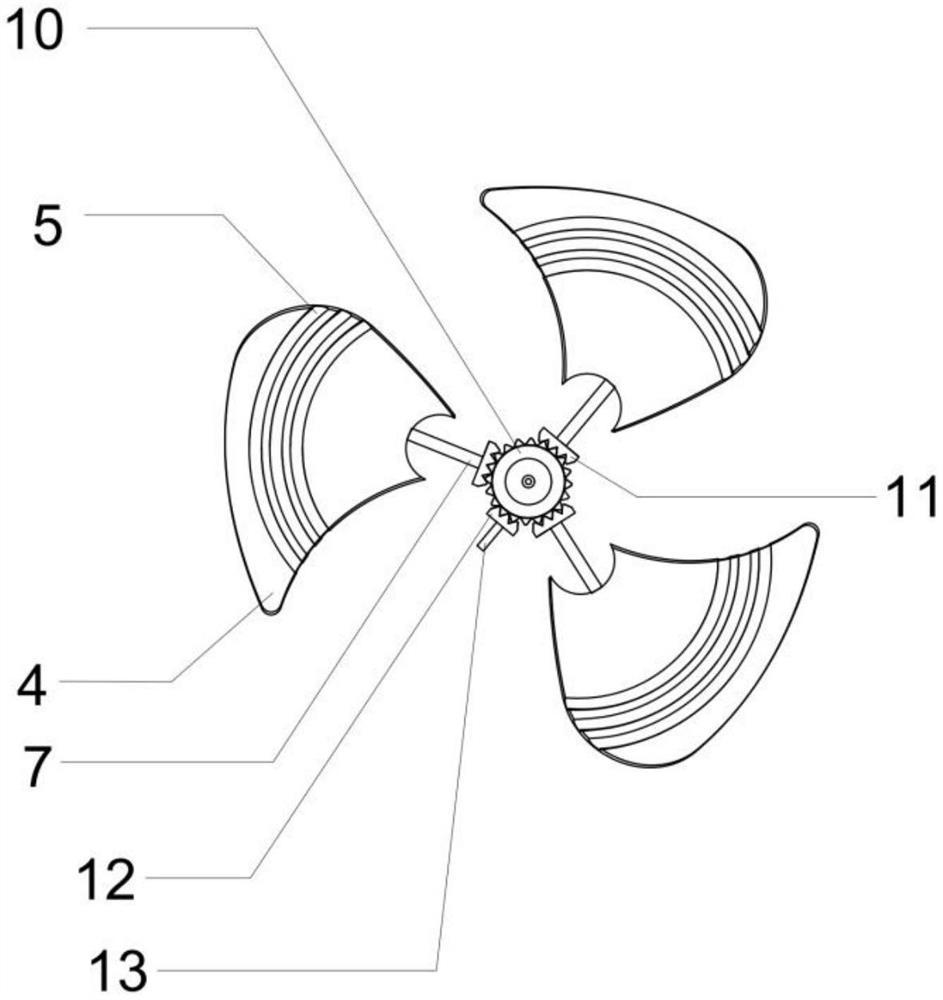
在一个实施例中,如图1和图4所示,点头鸭波浪能量转换装置300包括鸭体310和发电传动装置320。其中,鸭体310与发电传动装置320机械连接;鸭体310用于将蓄水槽110内的波浪能转换为机械能,发电传动装置320用于将机械能转换为电能。
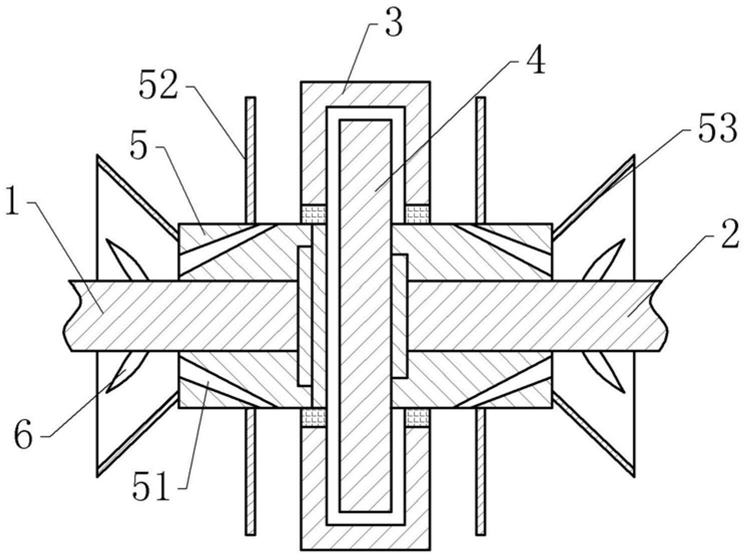
具体地,如图1、4和5所示,发电传动装置320包括旋转轴321、变速箱 322、第一发电机323A和第二发电机323B。其中,变速箱322固定于旋转轴321 上,并与鸭体310机械连接;第一发电机323A、第二发电机323B分别与变速箱322机械连接,用于将机械能转换为电能。
本实施例中,旋转轴321用于支撑起整个点头鸭波浪能量转换装置300;在鸭体310与发电传动装置320连接处还设有软性材料,该软性材料用于保证主轴旋转的同时防止鸭体进水;此外,第一发电机323A、第二发电机323B分别通过飞轮与变速箱322机械连接,该飞轮用于保证第一发电机323A和第二发电机323B的持续快速旋转,以提高第一发电机323A和第二发电机323B发电的稳定性。
在一个实施例中,参见图5,变速箱322的齿轮比设置为1:30。
在一个实施例中,如图6所示,点头鸭波浪能量转换装置还包括重心调节装置330,该重心调节装置330固定于鸭体310上,用于调节鸭体310的重心位置。
本实施例中,重心调节装置330设置为多根圆柱体金属棒,且该多根圆柱体金属棒固定于鸭体310的“鸭嘴”处,以使点头鸭波浪能量转换装置随波浪的攻角保持稳定的范围。具体地,该攻角范围保持在70°~90°。
需要说明的是,点头鸭波浪能量转换装置在攻角为70°~90°时所受到的波浪力最大。因此,为了保证点头鸭波浪能量转换装置在工作状态时时刻保持70°~90°的攻角,本实施例通过添加重物使点头鸭波浪能量转换装置的重心位置发生偏移可以实现点头鸭波浪能量转换装置的攻角一直保持在70°~90°,并且当攻角呈钝角姿态时,重心位置又发生偏移,使点头鸭波浪能量转换装置重新回到70°~90°,从而大大提高了系统的稳定性。
在一个实施例中,参见图6,点头鸭波浪能量转换装置还包括升降杆340,该升降杆340与鸭体310滑动连接,用于调节鸭体310沿竖直方向上的位置。
需要说明的是,随着波浪高度的增加,鸭体310的摆动幅度越来越大,当鸭体310摆动幅度与水平线呈超过90°后,换能装置将会“翻车”,即丧失发电功能。因此,本实施例中设置了升降杆340与鸭体310滑动连接,通过该升降杆340可实现对鸭体310高度的调节,从而实现对点头鸭波浪能量转换装置工作状态的调节,使发电系统实时处在最佳工作状态。
在一个实施例中,该升降杆340连接一个步进电机,该步进电机电气连接上位机,结合超声波测距模块,记录使鸭体310处在最佳工作状态的波幅区间。当超声波测距模块检测到的波幅超过该区间时,便自动发送信号给步进电机,配合升降杆340实现对鸭体310高度的调节。
在一个实施例中,如图7所示,点头鸭式波浪发电模拟装置还包括消波装置400,该消波装置400分别设置在蓄水槽110的第一端和第二端,用于稳定该蓄水槽110内的波浪波形。
本实施例中,消波装置400包括若干不规则的玻璃碎渣,采用玻璃碎渣可对蓄水槽110的前后(即第一端和第二端)进行消波,稳定波浪波形,减少反射波干扰,避免形成驻波,便于观察、测量、采集数据。
上述点头鸭式波浪发电模拟系统中,在蓄水槽的上端设置了波浪检测装置 200,该波浪检测装置200可检测蓄水槽110内的波浪的波长和波幅,实现对波长和波幅的实时监测,从而研究不同波长和波幅对发电效率的影响。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
点头鸭式波浪发电模拟系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0