







专利摘要
本发明属于核电站控制技术领域,尤其涉及一种用于铅冷快堆功率的自抗扰控制方法,包括:S1:依据中子动力学方程获得铅冷快堆温度微分方程,根据铅冷快堆中的温度反馈结合控制棒棒位变化得到铅冷快堆反应性反馈方程;S2:对中子动力学方程中的六组缓发中子建立近似单组缓发中子模型,并转化成2阶非线性模型;S3:利用2阶非线性模型信息,设计基于线性扩张状态观测器的自抗扰控制器;S4:通过给定控制器带宽和观测器带宽来确定铅冷快堆功率控制系统的自抗扰控制过程。
权利要求
1.一种用于铅冷快堆功率的自抗扰控制方法,其特征在于,包括:
S1:依据反应堆中子动力学获得铅冷快堆中子密度和缓发中子先驱核浓度微分方程,依据堆芯热传输与热平衡获得燃料温度、包壳温度和冷却剂平均温度微分方程,根据铅冷快堆中的温度反馈结合控制棒棒位变化得到铅冷快堆反应性反馈方程;所述中子密度和缓发中子先驱核浓度微分方程为:
其中,t为时间,n(t)为中子数函数,ρ(t)为铅冷快堆反应性反馈方程,β为总有效缓发中子份额,Λ为不变的中子平均寿命,i为缓发中子组序号,λ
其中,M
ρ(t)=α
其中,ρ(t)为铅冷快堆反应性反馈方程,α
S2:对中子动力学方程中的六组缓发中子建立近似单组缓发中子模型,并转化成2阶非线性模型;
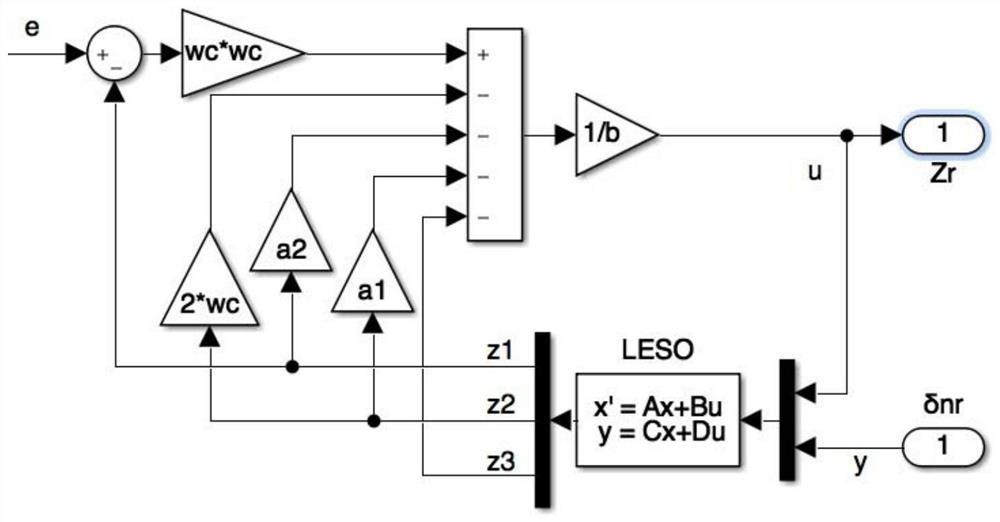
S3:利用2阶非线性模型信息,设计基于线性扩张状态观测器的自抗扰控制器;
S4:通过给定控制器带宽和观测器带宽来确定铅冷快堆功率控制系统的自抗扰控制过程。
2.根据权利要求1所述的一种用于铅冷快堆功率的自抗扰控制方法,其特征在于,所述温度反馈为燃料多普勒效应反应性反馈系数、轴向及径向膨胀反应性反馈系数和冷却剂密度反应性反馈系数。
3.根据权利要求1或2所述的一种用于铅冷快堆功率的自抗扰控制方法,其特征在于,所述2阶非线性模型为:
其中:n
中间变量
4.根据权利要求3所述的一种用于铅冷快堆功率的自抗扰控制方法,其特征在于,所述S3具体包括:将式(7)用式(8)的形式表达,
y和u分别是输出和输入的控制量,g是模型不确定因素,w为系统的外部扰动,令f=g+w为总扰动;
令中间变量
其中:
其中,x
其中z是观测器中x的观测估计项,L是观测器增益,用极点配置方法获得:
l
z
控制器设计:
f
PD控制器控制:
u
其中r为设定值,闭环传递函数为:
其中,比例系数
一种用于铅冷快堆功率的自抗扰控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0