







专利摘要
本发明属于水下机器人回收领域,具体地说是一种水下机器人回收用自动抛绳器,包括端盖、储绳腔、火工推进器、底座及高强绳缆,其中底座安装在水下机器人的壳体上,所述火工推进器安装在该底座上,储绳腔的下端与火工推进器相连,上端设有端盖,所述高强绳缆的一端连接在水下机器的壳体上,另一端依次穿过所述底座、储绳腔,与所述端盖相连;所述储绳腔及其内容置的高强绳缆和端盖通过火工推进器产生的推力推出。本发明具有结构简单可靠,体积小,能在水下、水面工作等特点。
权利要求
1.一种水下机器人回收用自动抛绳器,其特征在于:包括端盖(1)、储绳腔(2)、火工推进器(5)、底座(6)及高强绳缆(9),其中底座(6)安装在水下机器人的壳体上,所述火工推进器(5)安装在该底座(6)上,储绳腔(2)的下端与火工推进器(5)相连,上端设有端盖(1),所述高强绳缆(9)的一端连接在水下机器人的壳体上,另一端依次穿过所述底座(6)、储绳腔(2),与所述端盖(1)相连;所述储绳腔(2)及其内容置的高强绳缆(9)和端盖(1)通过火工推进器(5)产生的推力推出。
2.按权利要求1所述的水下机器人回收用自动抛绳器,其特征在于:所述储绳腔(2)通过其下端设置的推杆(3)与火工推进器(5)的火工推进器帽(4)相连接。
3.按权利要求2所述的水下机器人回收用自动抛绳器,其特征在于:所述推杆(3)安装在储绳腔(2)底面的中间,推杆(3)的下端由储绳腔(2)的底面向下延伸、插设在所述火工推进器(5)的火工推进器帽(4)上;在所述推杆(3)一侧的储绳腔(2)底面上开有供所述高强绳缆(9)穿过的预留孔(14)。
4.按权利要求1所述的水下机器人回收用自动抛绳器,其特征在于:所述高强绳缆(9)位于储绳腔(2)中的部分通过绕绳器(11)缠绕,缠绕后退出所述绕绳器(11)的高强绳缆(9)的另一端通过绳缆固定螺钉(7)固接在端盖(1)上。
5.按权利要求4所述的水下机器人回收用自动抛绳器,其特征在于:所述高强绳缆(9)按由下至上螺旋缠绕在绕绳器(11)一层,再反向由上至下缠绕,依次反复均匀缠绕。
6.按权利要求1所述的水下机器人回收用自动抛绳器,其特征在于:所述底座(6)的顶部为凹槽,凹槽中部向下延伸形成中空的圆柱,在所述凹槽的侧壁上开有供高强绳缆(9)穿过的第一通孔;所述火工推进器(5)的一端安装在所述凹槽的底面上,另一端插入所述中空的圆柱内,在所述中空的圆柱的底面开有供水下机器人内的电缆穿过的第二通孔,所述水下机器人内的电缆与火工推进器(5)的输入端相连接。
7.按权利要求1所述的水下机器人回收用自动抛绳器,其特征在于:所述端盖(1)采用浮力材料,储绳腔(2)采用摩擦系数小的聚四氟乙烯材料。
8.按权利要求1所述的水下机器人回收用自动抛绳器,其特征在于:所述高强绳缆(9)的直径为8mm,破断力不小于6t。
9.按权利要求1所述的水下机器人回收用自动抛绳器,其特征在于:所述自动抛绳器通过底座(6)安装在水下机器人的背部耐压壳体(12)上,所述底座(6)与背部耐压壳体(12)之间以及所述火工推进器(5)与底座(6)之间分别通过O型橡胶密封圈(8)密封连接;所述火工推进器(5)的输入端与水下机器人的壳体内电缆(13)相连。
10.按权利要求1所述的水下机器人回收用自动抛绳器,其特征在于:所述自动抛绳器通过底座(6)安装在水下机器人的艏部耐压壳体(15)外,所述火工推进器(5)的输入端通过水密电缆(10)与水下机器人相连。
说明书
技术领域
本发明属于水下机器人回收领域,具体地说是一种水下机器人回收用自动抛绳器。
背景技术
由于海洋情况复杂多变,水下机器人的回收一直是世界性的难题。为了发明一种安全可靠的回收方法,需要一种能应用于水下、水面的自动抛绳器。
现有技术的抛绳器多为步枪或台座式结构,用于陆上或水面救援,包括发射器座、抢把手、肩托、枪体接头件、发射气瓶等部件,并采用高压气瓶的工作方式;也有抛射火箭式的,但其头部较重,发射后火箭会直接沉没于水中。以上所述现有的抛绳器无论从结构形式、体积重量方面都不满足水下机器人组部件小型化、轻量化的使用要求,且高压气瓶的工作方式也不适合于水下机器人。目前尚未发现适用于水下机器人的水下、水面自动抛绳器。
发明内容
为了解决现有抛绳器不适用于水下机器人使用条件的问题,本发明的目的在于提供一种水下机器人回收用自动抛绳器。该自动抛绳器在水下机器人回收时能自动弹出高强度绳缆,能用于水下或水面。
本发明的目的是通过以下技术方案来实现的:
本发明包括端盖、储绳腔、火工推进器、底座及高强绳缆,其中底座安装在水下机器人的壳体上,所述火工推进器安装在该底座上,储绳腔的下端与火工推进器相连,上端设有端盖,所述高强绳缆的一端连接在水下机器的壳体上,另一端依次穿过所述底座、储绳腔,与所述端盖相连;所述储绳腔及其内容置的高强绳缆和端盖通过火工推进器产生的推力推出。
其中:所述储绳腔通过其下端设置的推杆与火工推进器的火工推进器帽相连接;所述推杆安装在储绳腔底面的中间,推杆的下端由储绳腔的底面向下延伸、插设在所述火工推进器的火工推进器帽上;在所述推杆一侧的储绳腔底面上开有供所述高强绳缆穿过的预留孔;所述高强绳缆位于储绳腔中的部分通过绕绳器缠绕,缠绕后退出所述绕绳器的高强绳缆的另一端通过绳缆固定螺钉固接在端盖上;所述高强绳缆按由下至上螺旋缠绕在绕绳器一层,再反向由上至下缠绕,依次反复均匀缠绕;所述底座的顶部为凹槽,凹槽中部向下延伸形成中空的圆柱,在所述凹槽的侧壁上开有供高强绳缆穿过的第一通孔;所述火工推进器的一端安装在所述凹槽的底面上,另一端插入所述中空的圆柱内,在所述中空的圆柱的底面开有供水下机器人内的电缆穿过的第二通孔,所述水下机器人内的电缆与火工推进器的输入端相连接;所述端盖采用浮力材料,储绳腔采用摩擦系数小的聚四氟乙烯材料;所述高强绳缆的直径为8mm,破断力不小于6t;所述自动抛绳器通过底座安装在水下机器人的背部耐压壳体上,所述底座与背部耐压壳体之间以及所述火工推进器与底座之间分别通过O型橡胶密封圈密封连接;所述火工推进器的输入端与水下机器人的壳体内电缆相连;所述自动抛绳器通过底座安装在水下机器人的艏部耐压壳体外,所述火工推进器的输入端通过水密电缆与水下机器人相连。
本发明的优点与积极效果为:
1.结构简单可靠。由于水下机器人完全自主航行,对抛绳器的可靠性要求就较高;本发明为全部机械结构,简单实用,将高强绳缆固定端置于水下机器人本体上,抽出端置于弹射本体内的好处是可使线缆顺利抽出,减小发生打结、无法弹出等状况的概率,且即使发生这种情况,当工作人员将其打捞回收后,也可将其捋顺,继续作业;
2.体积小,重量轻,空间利用率高。本发明采用绕绳器缠绕高强绳缆,使储绳腔空间利用率达到最大化,同时便于高强绳缆缠绕和退入储绳腔内。
3.本发明的储绳腔采用摩擦系数小的聚四氟乙烯材料,使储绳腔被弹出时绳缆与储绳腔的摩擦力不会阻碍绳缆弹出,尽可能的保证了抛绳器的工作可靠性。
4.本发明根据水下机器人重力与浮力基本相等的特点,端盖采用浮力材料,使得整个抛绳器为正浮力,当被弹出落下后可以漂浮在海面上,等待回收人员打捞。
5.易于安装及使用。本发明各部分安装方便,高强绳缆易于安装,使用时仅需将水密电缆与火工推进器连接好即可,方便快捷。
6.能在水下、水面工作。本发明的底座与壳体密封或火工推进器接水密电缆的设计使得抛绳器能在水下、水面正常工作,不会影响工作效果
附图说明
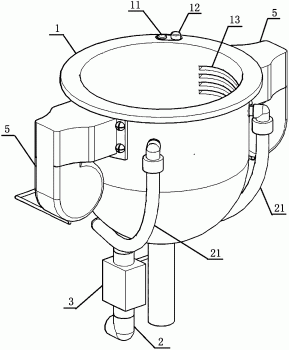
图1为本发明安装在水下机器人背部耐压壳体的结构示意图;
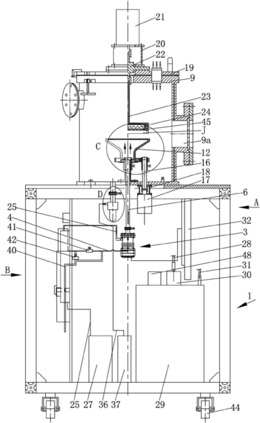
图2为本发明安装在水下机器人艏部耐压壳体的结构示意图;
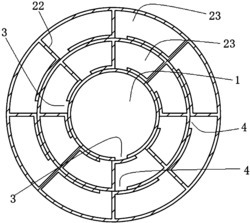
图3A为本发明高强绳缆缠绕在绕绳器上的示意图之一;
图3B为本发明高强绳缆缠绕在绕绳器上的示意图之二;
图3C为本发明高强绳缆缠绕在绕绳器上的示意图之三;
其中:1为端盖,2为储绳腔,3为推杆,4为火工推进器帽,5为火工推进器,6为底座,7为绳缆固定螺钉,8为O型橡胶密封圈,9为高强绳缆,10为水密电缆,11为绕绳器,12为背部耐压壳体,13为壳体内电缆,14为预留孔,15为艏部耐压壳体。
具体实施方式
下面结合附图对本发明作进一步详述。
本发明包括端盖1、储绳腔2、火工推进器5、底座6及高强绳缆9,其中底座6用于与水下机器人的壳体相连接,底座6的顶部为凹槽,凹槽中部向下延伸形成中空的圆柱,在所述凹槽的侧壁上开有供高强绳缆9穿过的第一通孔;所述火工推进器5安装在该底座6上,火工推进器5的一端安装在所述凹槽的底面上,另一端插入所述中空的圆柱内,在所述中空的圆柱的底面开有供水下机器人内的电缆穿过的第二通孔,所述水下机器人内的电缆与火工推进器5的输入端相连接。
储绳腔2的下端与火工推进器5相连,上端设有端盖1;储绳腔2为上端开口的中空圆柱,在储绳腔2的底面中间设有推杆3,该推杆3的下端由储绳腔2的底面向下延伸、插设在所述火工推进器5的火工推进器帽4上;在所述推杆3一侧的储绳腔2底面上开有供所述高强绳缆9穿过的预留孔14。本发明的端盖1采用浮力材料,使自动抛绳器抛出后能漂浮在水面上等待工作人员打捞,浮力材料为密度小于1的材料,为市购产品,购置于青岛海洋化工研究院,型号为浮力材料SBM-050,标准:Q/HHY221-2005。储绳腔2采用摩擦系数小的聚四氟乙烯材料,可减小抛绳时高强绳缆9与储绳腔2内壁之间的摩擦阻力;高强绳缆9的直径为8mm,破断力不小于6t。
高强绳缆9的一端连接在水下机器的壳体上,另一端依次穿过所述底座6上的第一通孔、储绳腔2上的预留孔14,与所述端盖1相连;所述储绳腔2及其内容置的高强绳缆9和端盖1通过火工推进器5产生的推力推出。高强绳缆9位于储绳腔2中的部分通过绕绳器11缠绕,绕绳方法为:高强绳缆9首先从下至上螺旋缠绕在绕绳器11上一层,接着反向从上至下缠绕,如此反复,最终全部均匀缠绕;缠绕后,将高强绳缆9的另一端通过绳缆固定螺钉7固接在端盖1上,退出绕绳器11,将端盖1用螺钉固接在储绳腔2的顶端。
本发明可通过底座6安装在水下机器人的背部耐压壳体12上或安装在水下机器人的艏部耐压壳体15外。如图1所示,本发明通过底座6安装在水下机器人的背部耐压壳体12上,所述底座6与背部耐压壳体12之间以及所述火工推进器5与底座6之间分别通过O型橡胶密封圈8密封连接;火工推进器5与火工推进器帽4装配好后带O型橡胶密封圈8固定在底座6上,储绳腔2通过推杆3与火工推进器帽4连接;高强绳缆9的一端紧固在水下机器人的背部耐压壳体12上,另一端从底座6引出并穿过储绳腔2后,使用绕绳器11将高强绳缆9绕好,与绳缆固定螺钉7紧固后,退出绕绳器11,并将高强绳缆9放入储绳腔2中,使端盖1与储绳腔2可靠连接。火工推进器5的输入端与水下机器人的壳体内电缆13相连。
如图2所示,本发明通过底座6安装在水下机器人的艏部耐压壳体15外,无需O型橡胶密封圈8,其余安装方式与安装在水下机器人背部耐压壳体上相同;火工推进器5的输入端通过水密电缆10与水下机器人相连。
本发明的工作原理为:
如图1所示,当本发明安装在水下机器人的背部耐压壳体12上、用于引导对接起吊装置对接时,首先将火工推进器5与火工推进器帽4装配好后,固定在底座6上。将火工推进器5的输入端与壳体内电缆13连接好,再将底座6固定在水下机器人的背部耐压壳体12上,火工推进器5与底座6之间以及底座6与背部耐压壳体12之间要加O型橡胶密封圈8作密封处理。接下来用推杆3连接火工推进器帽4将储绳腔2安装在底座6上,将高强绳缆9和一端紧固在水下机器人的背部耐压壳体12上后,另一端从底座6穿出并穿过储绳腔2,用如图3A~图3C所示的方法,将高强绳缆9缠绕在绕绳器11上,高强绳缆9的末端与绳缆固定螺钉7紧固后,将高强绳缆9退出绕绳器11、并放入储绳腔2中,盖上端盖1并用螺钉固定。当工作人员遥控发出信号使自动抛绳器工作时,由于火工推进器5瞬时产生的推力将火工推进器帽4及储绳腔2迅速推向空中,由于一端紧固在水下机器人上,另一端会顺着储绳腔2的预留孔14被抽出,在设计好的火工推进器5的推力作用下,可保证高强绳缆9从内部被顺序全部抽出。之后由于储绳腔2及端盖1为正浮力,其漂浮在海面上,等待工作人员回收。
如图2所示,当本发明安装在水下机器人的艏部耐压壳体15外、用于回收牵引时,无需安装O型橡胶密封圈8,将火工推进器5的输入端与水密电缆10连接即可,其余结构与安装在水下机器人的背部耐压壳体所述相同。
如图3A~图3C所示,高强绳缆9在绕绳器11上的缠绕方法为:首先将高强绳缆9由下至上螺旋缠绕在绕绳器11上一层,如图3A所示;接着反向从上至下缠绕,如图3B所示;如此反复,最终全部均匀缠绕,如图3C所示。注意高强绳缆缠绕时要施加预紧力,使绳缆缠绕紧密有力。
一种水下机器人回收用自动抛绳器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。





动态评分
0.0