









专利摘要
本发明公开了一种阀控缸电液位置伺服系统低频干扰补偿方法,包括以下步骤:输入位置指令信号r;将液压缸两腔压差信号p和液压缸活塞杆加速度信号a,作为干扰力计算模块的输入信号,求取干扰力F;计算干扰补偿信号x2;利用位置指令信号r减去液压缸活塞杆位移信号c,将二者之差作为比例积分控制器的输入信号;将比例积分控制器的输出信号x1与干扰补偿信号x2相加,得到伺服阀的驱动信号x,输入到阀控缸系统中,驱动液压缸及负载产生相应运动。采用本发明提出的低频干扰补偿方法,系统位置闭环传递函数幅频特性在6‑7Hz频段内的波动可以降低到3dB之内,明显提高了系统的控制精度。本发明易于采用计算机数字控制实现。
权利要求
1.一种阀控缸电液位置伺服系统低频干扰补偿方法,其特征在于:所述的阀控缸电液位置伺服系统包括减法器(1)、比例积分控制器(2)、加法器(3)、阀控缸系统(4)、干扰力计算模块(5)和干扰补偿信号计算模块(6);
所述的低频干扰补偿方法,包括以下步骤:
A、输入位置指令信号r;
B、将液压缸两腔压差信号p和液压缸活塞杆加速度信号a,作为干扰力计算模块(5)的输入信号,求取干扰力F,计算公式为:
F=pA-Ma
式中,M为液压缸活塞杆及负载的总质量,A为液压缸活塞及活塞杆之间的环形有效面积;
C、干扰补偿信号计算模块(6)计算干扰补偿信号x2,计算公式为:
x2=FG
其中,
式中,Ctc为液压缸的总泄露系数,Kc为伺服阀的流量压力系数,Vt为液压缸两腔的总容积,β
D、减法器(1)利用位置指令信号r减去液压缸活塞杆位移信号c,将二者之差作为比例积分控制器(2)的输入信号;
E、加法器(3)将比例积分控制器(2)的输出信号x1与干扰补偿信号x2相加,得到伺服阀的驱动信号x,输入到阀控缸系统(4)中,驱动液压缸及负载产生相应运动。
说明书
技术领域
本发明涉及机械领域的电液位置伺服系统,特别是一种阀控缸电液位置伺服系统低频干扰补偿方法。
背景技术
传统阀控缸电液位置伺服系统的设计,均假设系统有刚性基础,且液压缸与负载为刚性连接。但对于负载重量较大的系统,上述假设并不成立,系统的基础存在弹性,液压缸与负载也存在柔性连接。受基础弹性和液压缸与负载柔性连接等干扰的影响,系统位置闭环传递函数幅频特性在低频段易出现较大幅度的波动,极大降低了阀控缸位置伺服系统的控制精度。
分析表明,采用传统的控制方法时,受基础弹性和液压缸与负载柔性连接等干扰的影响,系统位置闭环传递函数幅频特性在6-7Hz频段内出现了约20dB的波动,严重影响了给定信号在该频段内的再现精度。
发明内容
为解决现有技术存在的上述问题,本发明要设计一种能有效提高阀控缸位置伺服系统的控制精度的阀控缸电液位置伺服系统低频干扰补偿方法。
为了实现上述目的,本发明的技术方案如下:一种阀控缸电液位置伺服系统低频干扰补偿方法,所述的阀控缸电液位置伺服系统包括减法器、比例积分控制器、加法器、阀控缸系统、干扰力计算模块和干扰补偿信号计算模块;
所述的低频干扰补偿方法,包括以下步骤:
A、输入位置指令信号r;
B、将液压缸两腔压差信号p和液压缸活塞杆加速度信号a,作为干扰力计算模块的输入信号,求取干扰力F,计算公式为:
F=pA-Ma
式中,M为液压缸活塞杆及负载的总质量,A为液压缸活塞及活塞杆之间的环形有效面积。
C、干扰补偿信号计算模块计算干扰补偿信号x2,计算公式为:
x2=FG
其中,
式中,Ctc为液压缸的总泄露系数,Kc为伺服阀的流量压力系数,Vt为液压缸两腔的总容积,βe为油液等效体积弹性模数,s为拉普拉斯变换的复变量,Kq为伺服阀的流量增益,f为转折频率。
D、减法器利用位置指令信号r减去液压缸活塞杆位移信号c,将二者之差作为比例积分控制器的输入信号;
E、加法器将比例积分控制器的输出信号x1与干扰补偿信号x2相加,得到伺服阀的驱动信号x,输入到阀控缸系统中,驱动液压缸及负载产生相应运动。
与现有技术相比,本发明具有以下有益效果:
1、采用本发明提出的低频干扰补偿方法,系统位置闭环传递函数幅频特性在6-7Hz频段内的波动可以降低到3dB之内,明显提高了系统的控制精度。
2、本发明的所有步骤均可通过软件编程实现。在CPU为Intel PD 2.6G、内存为1G的Advantech工控机IPC-610上测试,算法的运行周期小于1ms,能够满足电液位置伺服系统实时性要求,所以本发明易于采用计算机数字控制实现。
附图说明
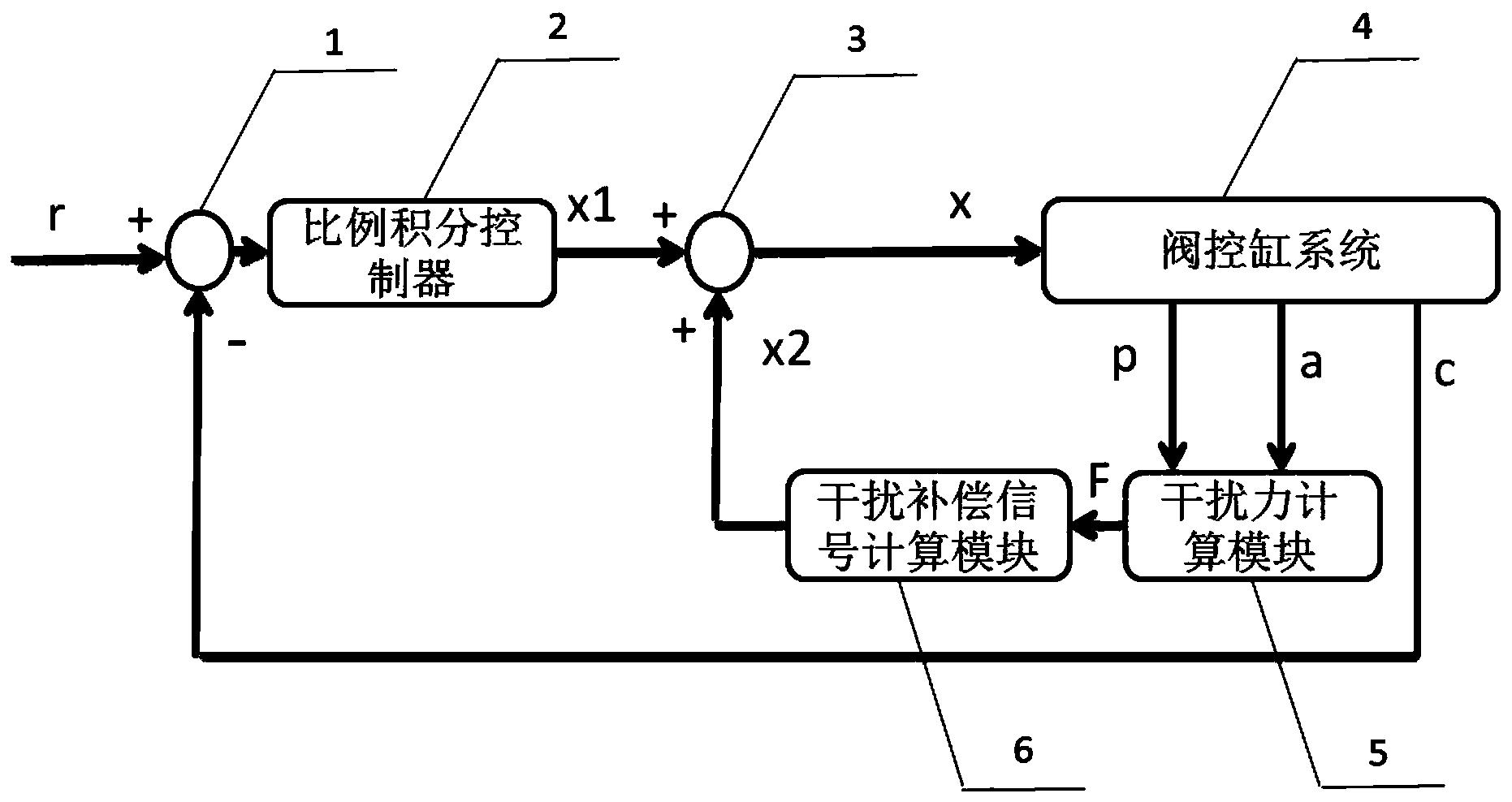
图1是本发明的控制流程示意图。
图中:1、减法器,2、比例积分控制器,3、加法器,4、阀控缸系统,5、干扰力计算模块,6、干扰补偿信号计算模块。
具体实施方式
下面结合附图对本发明进行进一步地描述。如图1所示,一种阀控缸电液位置伺服系统低频干扰补偿方法,所述的阀控缸电液位置伺服系统包括减法器1、比例积分控制器2、加法器3、阀控缸系统4、干扰力计算模块5和干扰补偿信号计算模块6;
所述的低频干扰补偿方法,包括以下步骤:
A、输入位置指令信号r;
B、将液压缸两腔压差信号p和液压缸活塞杆加速度信号a,作为干扰力计算模块5的输入信号,求取干扰力F,计算公式为:
F=pA-Ma
式中,M为液压缸活塞杆及负载的总质量,A为液压缸活塞及活塞杆之间的环形有效面积。
C、干扰补偿信号计算模块6计算干扰补偿信号x2,计算公式为:
x2=FG
其中,
式中,Ctc为液压缸的总泄露系数,Kc为伺服阀的流量压力系数,Vt为液压缸两腔的总容积,βe为油液等效体积弹性模数,s为拉普拉斯变换的复变量,Kq为伺服阀的流量增益,f为转折频率。
D、减法器1利用位置指令信号r减去液压缸活塞杆位移信号c,将二者之差作为比例积分控制器2的输入信号;
E、加法器1将比例积分控制器2的输出信号x1与干扰补偿信号x2相加,得到伺服阀的驱动信号x,输入到阀控缸系统4中,驱动液压缸及负载产生相应运动。
本发明不局限于本实施例,任何在本发明披露的技术范围内的等同构思或者改变,均列为本发明的保护范围。
一种阀控缸电液位置伺服系统低频干扰补偿方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。



动态评分
0.0