

IPC分类号 : B64D1/10,B64D1/12,B64C5/00,B64C5/08,B64C9/06,B64C13/00,B64C27/22,B64C27/28,B64D27/24,B64D31/00,B64D47/08,G05D1/08,G05D1/10






专利摘要
本申请提供一种物资投放无人机及控制系统,包括无人机、驱动机构及载物箱,驱动机构固定在无人机下方,载物箱通过牵引绳连接在驱动机构的下方;无人机包括:机身、一对机翼及一对尾翼;尾翼上设置可偏转的尾舵,机翼上设置可偏转的副翼;机翼下方安装一对向后的后置助推桨及一对向前的前置倾转桨;驱动机构包括步进电机,步进电机上安装主动齿轮,主动齿轮外侧啮合缠绕结构,牵引绳的一端固定在缠绕结构上,另一端连接在载物箱上。本申请的有益效果是:无人机飞行至目标目的地后,通过驱动机构中的步进电机的转动使得牵引绳牵引载物箱垂直升降,从而增加投放的准确性与稳定性。
权利要求
1.一种物资投放无人机,其特征在于,包括无人机、驱动机构及载物箱(200),所述驱动机构固定在所述无人机下方,所述载物箱(200)通过牵引绳(500)连接在所述驱动机构的下方;
所述无人机包括:机身(810)、设置在所述机身(810)两侧的一对机翼(820)及一对尾翼(830);一对所述尾翼(830)呈V字型排布固定在所述机身(810)的尾部,一对所述尾翼(830)上分别设置尾舵(831),所述尾翼(830)上对应所述尾舵(831)设置控制尾舵(831)偏转的尾舵机;一对所述机翼(820)上靠近所述尾翼(830)的一侧分别设置副翼(821),所述机翼(820)上对应所述副翼(821)设置控制副翼(821)偏转的副翼舵机;
一对所述机翼(820)的下表面分别固定安装支架(840),所述安装支架(840)设置方向与所述机身(810)平行,所述安装支架(840)靠近尾翼(830)的一端安装后置助推桨(850),另一端安装前置倾转桨(860);所述安装支架(840)上对应一对所述后置助推桨(850)及一对前置倾转桨(860)分别设置驱动电机(870),所述安装支架(840)上对应一对所述倾转桨分别设置控制所述倾转桨翻转的倾转舵机(861);
所述驱动机构包括步进电机(300),所述步进电机(300)的输出轴上安装主动齿轮(410),所述主动齿轮(410)外侧啮合缠绕结构,所述牵引绳(500)的一端固定在所述缠绕结构上,另一端连接在所述载物箱(200)上。
2.根据权利要求1所述的物资投放无人机,其特征在于,所述驱动机构包括可拆卸地安装在所述机身(810)底面的第一安装板(110),所述第一安装板(110)的下方通过第一支撑机构连接第二安装板(120),所述第二安装板(120)远离所述第一安装板(110)的一侧固定所述步进电机(300),所述步进电机(300)的输出轴穿过所述第二安装板(120)后延伸至第二安装板(120)与第一安装板(110)之间;所述第二安装板(120)下方连接所述载物箱(200);位于所述第一安装板(110)与第二安装板(120)之间的步进电机(300)的输出轴上固定所述主动齿轮(410)。
3.根据权利要求2所述的物资投放无人机,其特征在于,所述缠绕结构包括四组缠绕组件,四组所述缠绕组件对称设置在所述主动齿轮(410)外侧;
所述缠绕组件包括从动齿轮(420)、固定柱(430)以及压盖(440),所述固定柱(430)垂直固定在所述第二安装板(120)及第一安装板(110)之间,所述从动齿轮(420)可转动地套设在所述固定柱(430)上,所述从动齿轮(420)与所述主动齿轮(410)水平啮合,所述压盖(440)可转动地套设在所述固定柱(430)上且与所述从动齿轮(420)固定连接,所述压盖(440)固定在所述从动齿轮(420)的上方且与从动齿轮(420)之间形成缠绕槽(450),所述牵引绳(500)的一端固定在所述缠绕槽(450)内,另一端连接在所述载物箱(200)上。
4.根据权利要求3所述的物资投放无人机,其特征在于,所述第二安装板(120)上对应各个所述缠绕组件分别设置导向结构,各个所述导向结构对称设置在所述载物箱(200)的上方;所述牵引绳(500)的活动端穿过所述导向结构后向下延伸连接在所述载物箱(200)上;所述导向结构远离所述缠绕组件的一端的下边缘安装对应所述载物箱(200)设置的停止微动开关(600)。
5.根据权利要求4所述的物资投放无人机,其特征在于,所述导向结构包括水平设置的导向碳管(710)以及设置在所述导向碳管(710)远离缠绕组件一端的转动组件,所述导向碳管(710)远离所述转动组件的一端通过固定座(730)固定在所述第二安装板(120)上;所述牵引绳(500)的活动端依次穿过导向碳管(710)及转动组件后连接在所述载物箱(200)上。
6.根据权利要求5所述的物资投放无人机,其特征在于,所述转动组件包括一对安装套(720),一对所述安装套(720)包裹在所述导向碳管(710)的外侧,一对所述安装套(720)之间分别设有轴承(721)、定位轴(722)及滚轴(723),所述轴承(721)与定位轴(722)相对设置在一对所述安装套(720)之间,所述轴承(721)内嵌在一个所述安装套(720)内,所述定位轴(722)的一端固定在另一个所述安装套(720)内,所述轴承(721)与定位轴(722)之间连接有可转动地滚轴(723)。
7.根据权利要求6所述的物资投放无人机,其特征在于,所述驱动机构上设有所述无人机可触发的启动微动开关。
8.根据权利要求7所述的物资投放无人机,其特征在于,所述载物箱(200)的底部设有箱门(210),所述载物箱(200)上对应所述箱门(210)设置控制箱门(210)开闭的箱舵机(220)。
9.根据权利要求8所述的物资投放无人机,其特征在于,所述载物箱(200)上安装超声波传感器(230)。
10.一种应用权利要求9所述的无人机的投放控制系统,其特征在于,包括:控制所述驱动机构的第一控制系统、控制所述载物箱(200)的第二控制系统及控制所述无人机的第三控制系统;
所述第一控制系统包括第一控制器、第一数传模块、第一降压模块及第一电源;所述第一电源配置用于对所述第一降压模块进行供电;所述第一降压模块配置用于对所述第一控制器进行供电;所述第一控制器配置用于接收所述停止微动开关(600)及启动微动开关的信号,并向所述步进电机(300)发送控制信号;
第二控制系统包括第二控制器、第二数传模块、第二降压模块、第三降压模块、第四降压模块及第二电源;所述第二电源配置用于分别对所述第二降压模块、第三降压模块及第四降压模块进行供电;所述第二降压模块配置用于对所述第二控制器进行供电;所述第三降压模块及第四降压模块分别对一对所述箱舵机(220)进行供电;所述第二控制器配置用于接收所述超声波传感器(230)的信号,并向一对所述箱舵机(220)发送控制信号;
所述第一数传模块及第二数传模块配置用于所述第一控制器及第二控制器之间的信号通信;
所述第三控制系统包括第三控制器、第五降压模块、第六降压模块、第三数传模块、电子调速器及第三电源;所述第三电源配置用于对所述第三控制器、电子调速器及第五降压模块进行供电;所述第五降压模块配置用于对所述第三电源的电压进行降压并对第六降压模块进行供电;所述第六降压模块配置用于对第五降压模块的电压进行降压并对所述第三数传模块进行供电;所述电子调速器设置四个,分别配置用于控制所述驱动电机(870)的转速;所述第三控制器配置用于通过第三数传模块与地面软件进行通信,分别向电子调速器、倾转舵机(861)、尾舵机及副翼舵机发送控制信号。
说明书
技术领域
本公开涉及无人机搜救技术领域,具体涉及一种物资投放无人机及控制系统。
背景技术
现在无人机搜救领域大部分都是依靠高清和热像摄像头进行外围考查和检测,无法真正的对伤员起到帮助的作用,另外传统的伞降物资不确定性很大,定向性较差,而且中途可能会造成物资的损失,不能保证物资能够定点、垂直向地送达遇难人员的身边。
发明内容
本申请的目的是针对以上问题,提供一种物资投放无人机及控制系统。
第一方面,本申请提供一种物资投放无人机,包括无人机、驱动机构及载物箱,所述驱动机构固定在所述无人机下方,所述载物箱通过牵引绳连接在所述驱动机构的下方;
所述无人机包括:机身、设置在所述机身两侧的一对机翼及一对尾翼;一对所述尾翼呈V字型排布固定在所述机身的尾部,一对所述尾翼上分别设置尾舵,所述尾翼上对应所述尾舵设置控制尾舵偏转的尾舵机;一对所述机翼上靠近所述尾翼的一侧分别设置副翼,所述机翼上对应所述副翼设置控制副翼偏转的副翼舵机;
一对所述机翼的下表面分别固定安装支架,所述安装支架设置方向与所述机身平行,所述安装支架靠近尾翼的一端安装后置助推桨,另一端安装前置倾转桨;所述安装支架上对应一对所述后置助推桨及一对前置倾转桨分别设置驱动电机,所述安装支架上对应一对所述倾转桨分别设置控制所述倾转桨翻转的倾转舵机;
所述驱动机构包括步进电机,所述步进电机的输出轴上安装主动齿轮,所述主动齿轮外侧啮合缠绕结构,所述牵引绳的一端固定在所述缠绕结构上,另一端连接在所述载物箱上。
根据本申请实施例提供的技术方案,所述驱动机构包括可拆卸地安装在所述机身底面的第一安装板,所述第一安装板的下方通过第一支撑机构连接第二安装板,所述第二安装板远离所述第一安装板的一侧固定所述步进电机,所述步进电机的输出轴穿过所述第二安装板后延伸至第二安装板与第一安装板之间;所述第二安装板下方连接所述载物箱;位于所述第一安装板与第二安装板之间的步进电机的输出轴上固定所述主动齿轮。
根据本申请实施例提供的技术方案,所述缠绕结构包括四组缠绕组件,四组所述缠绕组件对称设置在所述主动齿轮外侧;所述缠绕组件包括从动齿轮、固定柱以及压盖,所述固定柱垂直固定在所述第二安装板及第一安装板之间,所述从动齿轮可转动地套设在所述固定柱上,所述从动齿轮与所述主动齿轮水平啮合,所述压盖可转动地套设在所述固定柱上且与所述从动齿轮固定连接,所述压盖固定在所述从动齿轮的上方且与从动齿轮之间形成缠绕槽,所述牵引绳的一端固定在所述缠绕槽内,另一端连接在所述载物箱上。
根据本申请实施例提供的技术方案,所述第二安装板上对应各个所述缠绕组件分别设置导向结构,各个所述导向结构对称设置在所述载物箱的上方;所述牵引绳的活动端穿过所述导向结构后向下延伸连接在所述载物箱上;所述导向结构远离所述缠绕组件的一端的下边缘安装对应所述载物箱设置的停止微动开关。
根据本申请实施例提供的技术方案,所述导向结构包括水平设置的导向碳管以及设置在所述导向碳管远离缠绕组件一端的转动组件,所述导向碳管远离所述转动组件的一端通过固定座固定在所述第二安装板上;所述牵引绳的活动端依次穿过导向碳管及转动组件后连接在所述载物箱上。
根据本申请实施例提供的技术方案,所述转动组件包括一对安装套,一对所述安装套包裹在所述导向碳管的外侧,一对所述安装套之间分别设有轴承、定位轴及滚轴,所述轴承与定位轴相对设置在一对所述安装套之间,所述轴承内嵌在一个所述安装套内,所述定位轴的一端固定在另一个所述安装套内,所述轴承与定位轴之间连接有可转动地滚轴。
根据本申请实施例提供的技术方案,所述驱动机构上设有所述无人机可触发的启动微动开关。
根据本申请实施例提供的技术方案,所述载物箱的底部设有箱门,所述载物箱上对应所述箱门设置控制箱门开闭的箱舵机。
根据本申请实施例提供的技术方案,所述载物箱上安装超声波传感器。
第二方面,本申请提供一种物资投放无人机控制系统,包括:控制所述驱动机构的第一控制系统、控制所述载物箱的第二控制系统及控制所述无人机的第三控制系统;
所述第一控制系统包括第一控制器、第一数传模块、第一降压模块及第一电源;所述第一电源配置用于对所述第一降压模块进行供电;所述第一降压模块配置用于对所述第一控制器进行供电;所述第一控制器配置用于接收所述停止微动开关及启动微动开关的信号,并向所述步进电机发送控制信号;
第二控制系统包括第二控制器、第二数传模块、第二降压模块、第三降压模块、第四降压模块及第二电源;所述第二电源配置用于分别对所述第二降压模块、第三降压模块及第四降压模块进行供电;所述第二降压模块配置用于对所述第二控制器进行供电;所述第三降压模块及第四降压模块分别对一对所述箱舵机进行供电;所述第二控制器配置用于接收所述超声波传感器的信号,并向一对所述箱舵机发送控制信号;
所述第一数传模块及第二数传模块配置用于所述第一控制器及第二控制器之间的信号通信;
所述第三控制系统包括第三控制器、第五降压模块、第六降压模块、第三数传模块、电子调速器及第三电源;所述第三电源配置用于对所述第三控制器、电子调速器及第五降压模块进行供电;所述第五降压模块配置用于对所述第三电源的电压进行降压并对第六降压模块进行供电;所述第六降压模块配置用于对第五降压模块的电压进行降压并对所述第三数传模块进行供电;所述电子调速器设置四个,分别配置用于控制所述驱动电机的转速;所述第三控制器配置用于通过第三数传模块与地面软件进行通信,分别向电子调速器、倾转舵机、尾舵机及副翼舵机发送控制信号。
本发明的有益效果:本申请提供一种物资投放无人机,包括无人机、驱动机构及载物箱,所述驱动机构固定在所述无人机下方,所述载物箱通过牵引绳连接在所述驱动机构的下方;所述无人机包括:机身、设置在所述机身两侧的一对机翼及一对尾翼;一对所述尾翼呈V字型排布固定在所述机身的尾部,一对所述尾翼上分别设置尾舵,所述尾翼上对应所述尾舵设置控制尾舵偏转的尾舵机;一对所述机翼上靠近所述尾翼的一侧分别设置副翼,所述机翼上对应所述副翼设置控制副翼偏转的副翼舵机;一对所述机翼的下表面分别固定安装支架,所述安装支架设置方向与所述机身平行,所述安装支架靠近尾翼的一端安装后置助推桨,另一端安装前置倾转桨;所述安装支架上对应一对所述后置助推桨及一对前置倾转桨分别设置驱动电机,所述安装支架上对应一对所述倾转桨分别设置控制所述倾转桨翻转的倾转舵机;所述驱动机构包括步进电机,所述步进电机的输出轴上安装主动齿轮,所述主动齿轮外侧啮合缠绕结构,所述牵引绳的一端固定在所述缠绕结构上,另一端连接在所述载物箱上。
搭载的物资的无人机在后置助推桨及前置倾转桨的作用下从基地垂直起飞,在空中进入机翼及尾翼作用的固定翼模式进行远距离飞行,在抵达目的地后进行盘旋式搜索,确认目标之后进入由后置助推桨及前置倾转桨作用的垂直悬停模式准备物资投放;驱动机构控制步进电机旋转,带动主动齿轮旋转,主动齿轮旋转带动啮合的缠绕结构旋转,从而使得缠绕在缠绕结构上的牵引绳不断伸长放线,从而使得连接在牵引绳上的载物箱不断向下移动,当载物箱竖直下降到距离地面一定距离后,载物箱内的物资投放至定点区域,从而通过无人机实现物资的垂直、定点准确投放。
附图说明
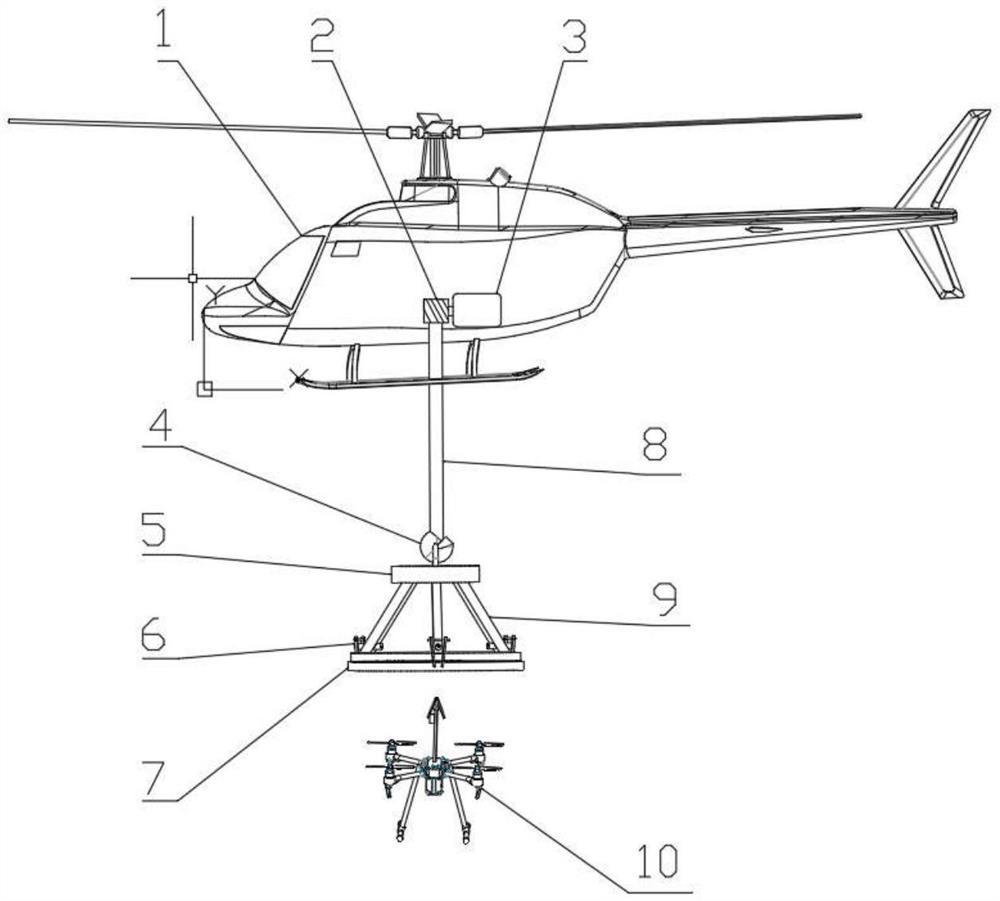
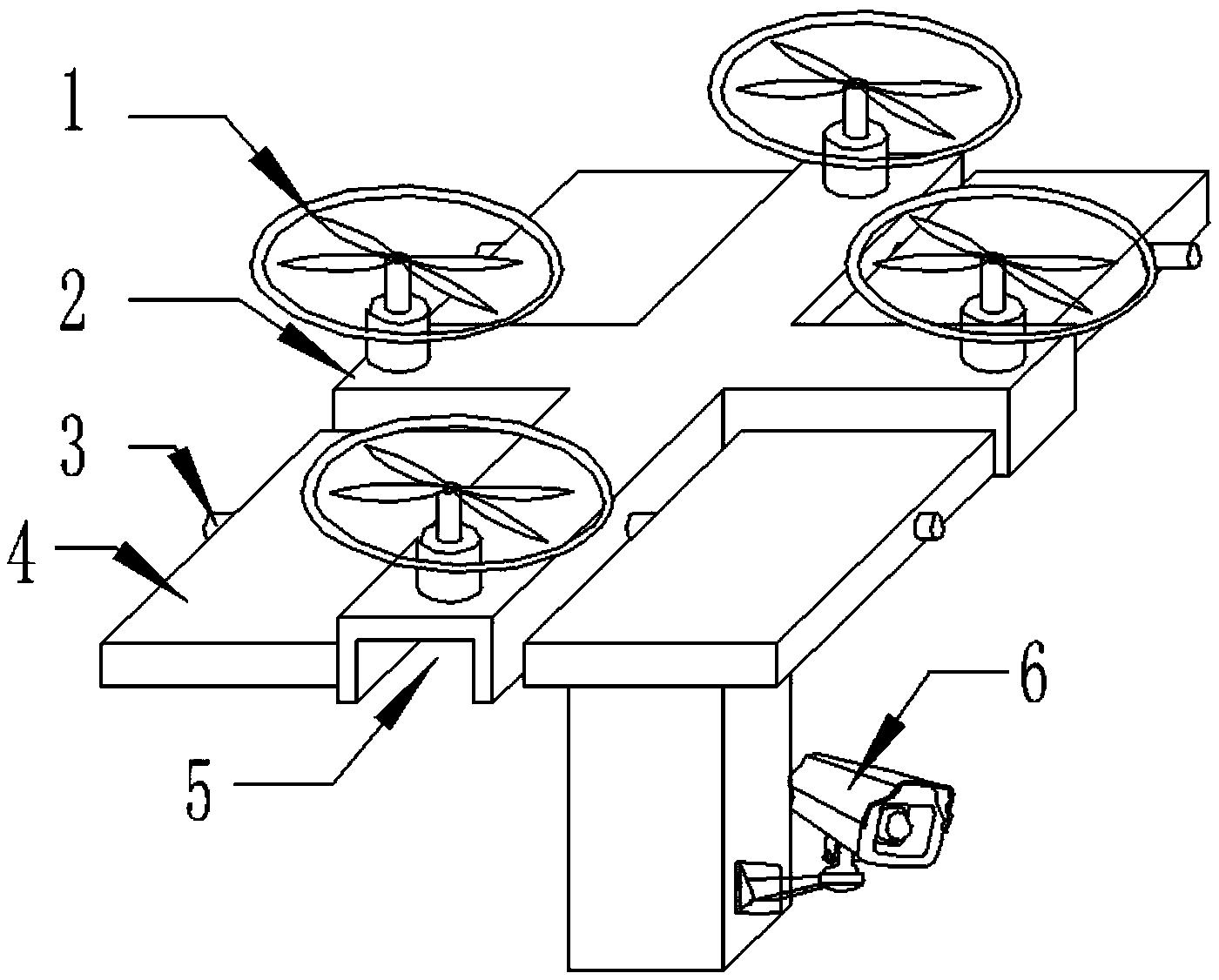
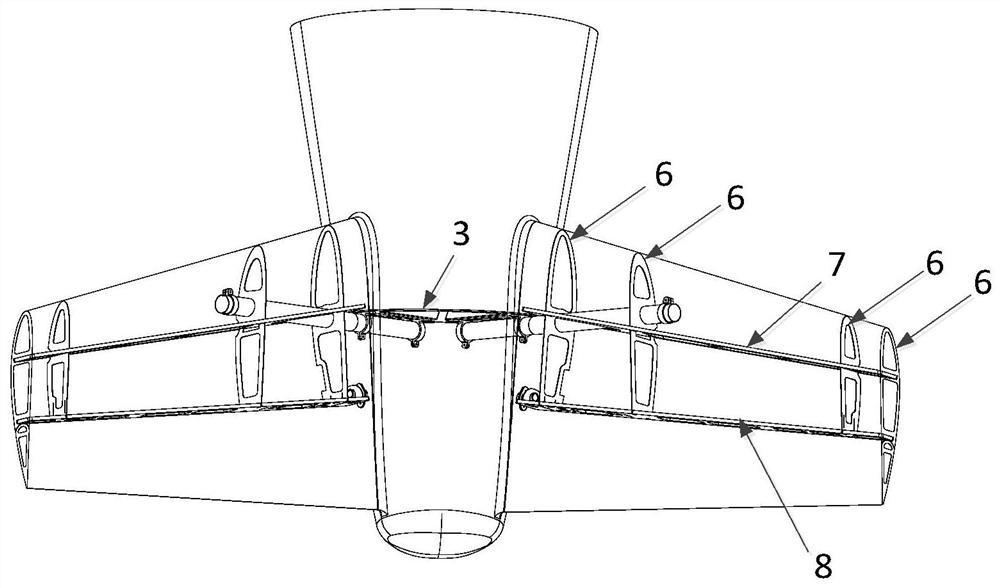
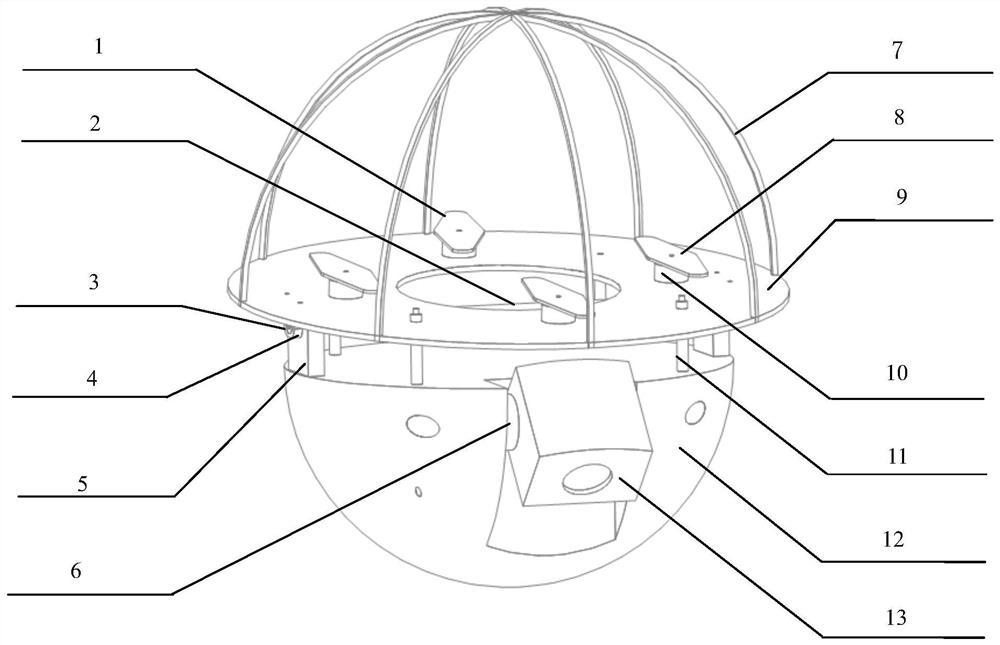
图1为本申请第一种实施例的轴侧结构示意图;
图2为本申请第一种实施例的主视结构示意图;
图3为本申请第一种实施例中驱动机构及载物箱的轴侧结构示意图;
图4为本申请第一种实施例中驱动机构及载物箱的主视结构示意图;
图5为本申请第一种实施例中主动齿轮与从缠绕结构配合的爆炸结构示意图;
图6为本申请第一种实施例中导向结构的爆炸结构示意图;
图7为本申请第一种实施例中载物箱的爆炸结构示意图;
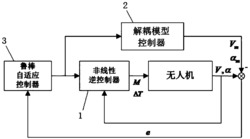
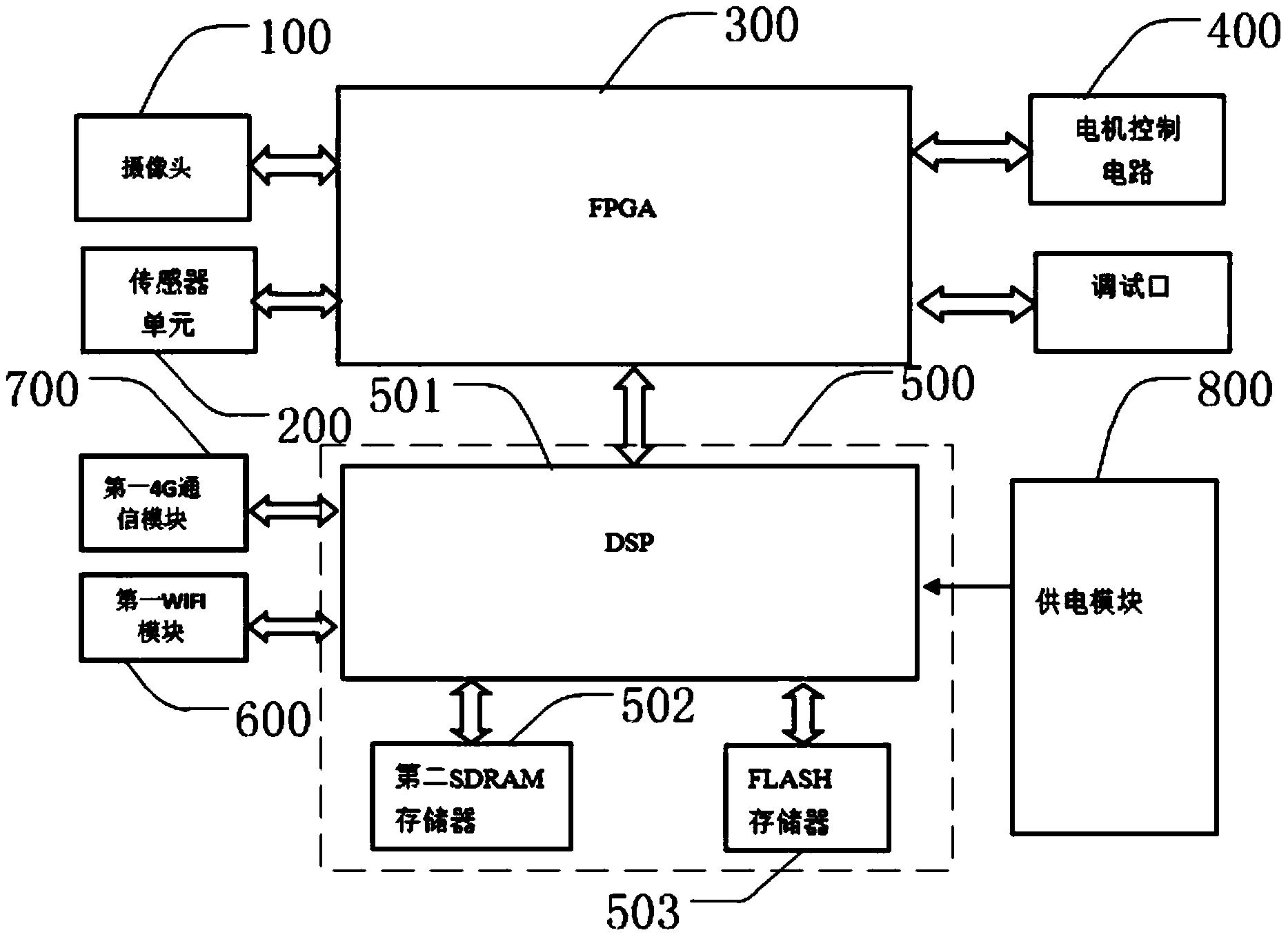
图8为本申请第二种实施例的原理框图;
图9为本申请第二种实施例的第一控制系统的电路接线图;
图10为本申请第二种实施例的第二控制系统的电路接线图;
图11为本申请第二种实施例的第三控制系统的电路接线图;
图中所述文字标注表示为:110、第一安装板;120、第二安装板;200、载物箱;210、箱门;220、箱舵机;230、超声波传感器;240、箱体连接件;300、步进电机;410、主动齿轮;420、从动齿轮;430、固定柱;440、压盖;450、缠绕槽;500、牵引绳;600、停止微动开关;710、导向碳管;720、安装套;721、轴承;722、定位轴;723、滚轴;730、固定座;810、机身;820、机翼;821、副翼;830、尾翼;831、尾舵;840、安装支架;850、后置助推桨;860、前置倾转桨;861、倾转舵机;870、驱动电机。
具体实施方式
为了使本领域技术人员更好地理解本发明的技术方案,下面结合附图对本申请进行详细描述,本部分的描述仅是示范性和解释性,不应对本申请的保护范围有任何的限制作用。
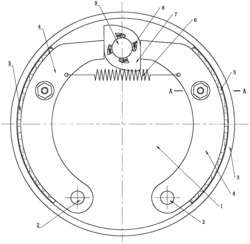
如图1至4所示为本申请的第一种实施例的示意图,包括无人机、驱动机构及载物箱200,所述驱动机构固定在所述无人机下方,所述载物箱200通过牵引绳500连接在所述驱动机构的下方。通过垂直起降搭载投放物资的无人机系统从基地垂直起飞后,在进行远距离飞行抵达目的地后进行盘旋式搜索,确认目标之后进入垂直悬停模式准备物资投放;驱动机构控制其下方的载物箱200垂直移动,到达定点区域后将载物箱200内的投放物资进行投放。
所述无人机包括:机身810、设置在所述机身810两侧的一对机翼820及一对尾翼830;一对所述尾翼830呈V字型排布固定在所述机身810的尾部,一对所述尾翼830上分别设置尾舵831,所述尾翼830上对应所述尾舵831设置控制尾舵831偏转的尾舵机;一对所述机翼820上靠近所述尾翼830的一侧分别设置副翼821,所述机翼820上对应所述副翼821设置控制副翼821偏转的副翼舵机。
本实施例中,尾翼830以及机翼820构成无人机的固定翼,在尾翼830与机翼820相对于机身810固定的基础上,副翼821相对于机翼820可进行偏转移动以调整机身810的姿态,同时尾舵831相对于尾翼830可进行偏转移动同时也起到调整机身810姿态的作用。本实施例中,副翼821相对于机翼820的偏转运动是通过副翼舵机进行驱动控制的;尾舵831相对于尾翼830的偏转运动是通过尾舵机进行驱动控制的。本实施例中,无人机起飞至控制进行远距离飞行时采用固定翼飞行模式,在机翼820及尾翼830固定的前提下,通过副翼821及尾舵831对固定翼飞行模式下的飞机姿态进行调整。
本实施例中,副翼舵机以及尾舵机均采用银燕金属9G舵机。
一对所述机翼820的下表面分别固定安装支架840,所述安装支架840设置方向与所述机身810平行,所述安装支架840靠近尾翼830的一端安装后置助推桨850,另一端安装前置倾转桨860;所述安装支架840上对应一对所述后置助推桨850及一对前置倾转桨860分别设置驱动电机870,所述安装支架840上对应一对所述倾转桨分别设置控制所述倾转桨翻转的倾转舵机861。
本实施例中,一对后置助推桨850主要用于飞机垂直飞行模式时提供升力,在固定翼飞行模式下静止,本实施例中,垂直飞行模式是指飞机进行升高或下降等垂直方向的飞行过程,例如在垂直起飞过程或者飞机停留在一定高度盘旋进行物资投放的过程均为垂直飞行模式。本实施例中,后置助推桨850的驱动电机870采用朗宇4112电机。
本实施例中,一对前置倾转桨860用于飞机的垂直飞行模式时提供升力和固定翼飞行模式时提供推力,也就是说前置倾转桨860在无人机的两种飞行模式中均处于工作状态并发挥作用。在垂直飞行模式时,前置倾转桨860在驱动电机870的作用下进行高速旋转为飞机垂直飞行提供升力;在固定翼飞行模式时,前置倾转桨860在驱动电机870高速驱动其旋转的同时,由倾转舵机861驱动前置倾转桨860整体旋转90度后继续进行工作以为固定翼飞行模式下的飞机提供推力。本实施例中,前置倾转桨860的驱动电机870采用朗宇3520电机,倾转舵机861采用25KG倾转舵机861。
所述驱动机构包括步进电机300,所述步进电机300的输出轴上安装主动齿轮410,所述主动齿轮410外侧啮合缠绕结构,所述牵引绳500的一端固定在所述缠绕结构上,另一端连接在所述载物箱200上。本实施例中,步进电机300采用Nology42行星减速步进电机300,牵引绳500采用钢丝绳。
本实施例中,搭载的物资的无人机在后置助推桨850及前置倾转桨860的作用下从基地垂直起飞,在空中进入机翼820及尾翼830作用的固定翼模式进行远距离飞行,在抵达目的地后进行盘旋式搜索,确认目标之后进入由后置助推桨850及前置倾转桨860作用的垂直悬停模式准备物资投放;驱动机构控制步进电机300旋转,带动主动齿轮410旋转,主动齿轮410旋转带动啮合的缠绕结构旋转,从而使得缠绕在缠绕结构上的牵引绳500不断伸长放线,从而使得连接在牵引绳500上的载物箱200不断向下移动,当载物箱200竖直下降到距离地面一定距离后,载物箱200内的物资投放至定点区域,从而通过无人机实现物资的垂直、定点准确投放。
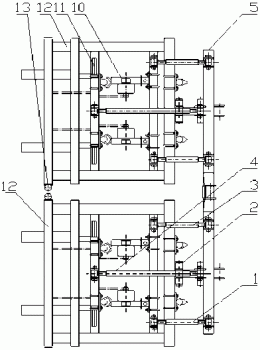
在一优选实施例中,所述驱动机构包括可拆卸地安装在所述机身810底面的第一安装板110,所述第一安装板110的下方通过第一支撑机构连接第二安装板120,所述第二安装板120远离所述第一安装板110的一侧固定所述步进电机300,所述步进电机300的输出轴穿过所述第二安装板120后延伸至第二安装板120与第一安装板110之间;所述第二安装板120下方连接所述载物箱200;位于所述第一安装板110与第二安装板120之间的步进电机300的输出轴上固定所述主动齿轮410。
本优选实施例中,第一安装板110及第二安装板120起到固定安装的作用,步进电机300在控制系统的作用下进行工作,步进电机300旋转工作带动主动齿轮410旋转。
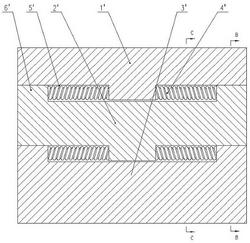
在上述优选实施例的一优选实施方式中,如图5所示,所述缠绕组件对称设置在所述主动齿轮410外侧;所述缠绕组件包括从动齿轮420、固定柱430以及压盖440,所述固定柱430垂直固定在所述第二安装板120及第一安装板110之间,所述从动齿轮420可转动地套设在所述固定柱430上,所述从动齿轮420与所述主动齿轮410水平啮合,所述压盖440可转动地套设在所述固定柱430上且与所述从动齿轮420固定连接,所述压盖440固定在所述从动齿轮420的上方且与从动齿轮420之间形成缠绕槽450,所述牵引绳500的一端固定在所述缠绕槽450内,另一端连接在所述载物箱200上。本优选实施方式中,缠绕组件中的从动齿轮420与主动齿轮410啮合连接,在从动齿轮420旋转的同时实现缠绕在缠绕槽450内的牵引绳500的放线及收线,进而实现连接在牵引绳500下方的载物箱200的垂直升降,因此缠绕组件具有复用的作用。
在上述优选实施例的一优选实施方式中,所述第二安装板120上对应各个所述缠绕组件分别设置导向结构,各个所述导向结构对称设置在所述载物箱200的上方;所述牵引绳500的活动端穿过所述导向结构后向下延伸连接在所述载物箱200上;所述导向结构远离所述缠绕组件的一端的下边缘安装对应所述载物箱200设置的停止微动开关600。本优选方式中,设置导向结构的目的是将缠绕组件上缠绕的牵引绳500向外导引至对应载物箱200边缘的上方。本优选方式中,在导向结构上设置停止微动开关600,当载物箱200投放完毕上升过程中,载物箱200的上边缘与停止微动开关600接触后,触发停止微动开关600,从而控制步进电机300停止工作。本实施例中,停止微动开关600采用AC1300V 5A型号。
优选地,如图6所示所述导向结构包括水平设置的导向碳管710以及设置在所述导向碳管710远离缠绕组件一端的转动组件,所述导向碳管710远离所述转动组件的一端通过固定座730固定在所述第二安装板120上;所述牵引绳500的活动端依次穿过导向碳管710及转动组件后连接在所述载物箱200上。本优选方式中,牵引绳500的活动端依次穿过导向碳管710及转动组件后连接在载物箱200上,导向碳管710的作用是将牵引绳500由缠绕组件向外延伸,因为载物箱200的横截面积大于第一安装板110及第二安装板120的横截面积,因此为使得载物箱200的上升或者下降作用更加平稳,将牵引绳500连接在载物箱200的四角上。转动组件的作用使得牵引绳500经过导向碳管710后更加顺畅地与导向碳管710边缘接触,从而保证载物箱200升降移动过程的稳定性。
优选地,如图6所示,所述转动组件包括一对安装套720,一对所述安装套720包裹在所述导向碳管710的外侧,一对所述安装套720之间分别设有轴承721、定位轴722及滚轴723,所述轴承721与定位轴722相对设置在一对所述安装套720之间,所述轴承721内嵌在一个所述安装套720内,所述定位轴722的一端固定在另一个所述安装套720内,所述轴承721与定位轴722之间连接有可转动地滚轴723。本优选方式中,一对安装套720固定安装在导向碳管710的外周,从而使得一对安装套720包裹在导向碳管710外周,轴承721及定位轴722分别相对地安装在一对安装套720内,并将滚轴723连接在轴承721与定位轴722之间且使得滚轴723在轴承721及定位轴722之间可转动地连接。将由导向碳管710末端伸出的牵引绳500的活动端沿滚轴723传输,由于滚轴723可相对转动,从而减小牵引绳500与滚轴723接触时的摩擦力,使得牵引绳500更加顺滑地沿滚轴723传输。
在一优选实施方式中,所述驱动机构上设有所述无人机可触发的启动微动开关。本优选方式中,在第一安装板110上设置启动微动开关,当无人机的遥控器发出启动指令后,启动无人机上的启动舵机(图中未示出)触发启动微动开关,启动微动开关被触发后,步进电机300开始启动工作。本实施例中,启动微动开关采用AC1300V 5A型号。
在一优选实施方式中,如图7所示,所述载物箱200的底部设有箱门210,所述载物箱200上对应所述箱门210设置控制箱门210开闭的箱舵机220。本优选方式中,当载物箱200到达距离地面设定高度后,控制箱舵机220旋转,从而带动箱门210打开,将载物箱200内的物资进行投放。本优选实施方式中,箱舵机220采用双出轴数字舵机。
在一优选实施方式中,所述载物箱200上安装超声波传感器230。安装在载物箱200上设置超声波传感器230用于检测载物箱200距离地面的高度。优选地,当超声波传感器230检测到距离地面1米时,步进电机300停止工作。本优选实施方式中,超声波传感器230采用IOE-SR05超声波测距模块。
在一优选实施方式中,所述载物箱200的顶板的四角分别安装箱体连接件240,所述牵引绳500的活动端固定在所述箱体连接件240上。本优选实施方式中,载物箱200顶板的四角上分别设置箱体连接件240,可以使得分别连接在箱体连接件240上的四根牵引绳500均匀受力,能够保证四根牵引绳500均匀地承载载物箱200,从而使得投放过程更加平稳。
如图8所示,为本申请的第二种实施例,本实施例是对第一种实施例的控制系统,包括:控制所述驱动机构的第一控制系统、控制所述载物箱200的第二控制系统及控制所述无人机的第三控制系统。
如图9所示,所述第一控制系统包括第一控制器、第一数传模块、第一降压模块及第一电源;所述第一电源配置用于对所述第一降压模块进行供电;所述第一降压模块配置用于对所述第一控制器进行供电。本实施例中,第一电源为充电锂电池,所述第一电源配置用于对所述第一降压模块进行供电;所述第一降压模块配置用于对所述第一控制器进行供电,本实施例中第一降压模块采用HENGE 4A开关式UBEC降压模块,目的是将第一电源的7V-26V的输入电源降压为5V 4A的电量,供第一控制器使用。
所述第一控制器配置用于接收所述停止微动开关600及启动微动开关的信号,并向所述步进电机300发送控制信号。所述第一控制器配置用于接收所述停止微动开关600及启动微动开关的信号,并向所述步进电机300发送控制信号;本实施例中,第一控制器采用Arduino nano V3.0 ATMEGA328P,当第一控制器接收停止微动开关600的信号后,向步进电机300发送停止信号,当第一控制器接收启动微动开关的信号后,向步进电机300发送启动信号。本实施例中,第一控制器通过七特步进电机300驱动控制器对步进电机300进行控制,步进电机300驱动控制器用于控制步进电机300的转动方向、速度和使能,并给步进电机300提供动力,而步进电机300驱动器的动力由第一控制器提供。
如图10所示,第二控制系统包括第二控制器、第二数传模块、第二降压模块、第三降压模块、第四降压模块及第二电源;所述第二电源配置用于分别对所述第二降压模块、第三降压模块及第四降压模块进行供电;所述第二降压模块配置用于对所述第二控制器进行供电;所述第三降压模块及第四降压模块分别对一对所述箱舵机220进行供电。本实施例中,第二电源为充电锂电池,所述第二电源配置用于分别对所述第二降压模块、第三降压模块及第四降压模块进行供电;
第二降压模块、第三降压模块及第四降压模块均采用BEC降压模块,其中,第二降压模块将第二电源的7V-26V的输入电源降压为5V 3A电量为第二控制器进行供电,所述第三降压模块及第四降压模块分别将第二电源的7V-26V的输入电源降压为7V 3A电量为一对控制箱门210的舵机进行供电;本实施例中,控制箱门210的舵机采用双出轴数字舵机。
所述第二控制器配置用于接收所述超声波传感器230的信号,并向一对所述箱舵机220发送控制信号。所述第二控制器配置用于接收所述超声波传感器230的信号,并向一对所述舵机发送控制信号;本实施例中,第二控制器采用Arduino nano V3.0 ATMEGA328P,当第二控制器接收超声波传感器230检测到的距离地面1米的信号时,将超声波信号通过第二数传模块及第一数传模块发送至第一控制器,由第一控制器控制步进电机300停止工作。
所述第一数传模块及第二数传模块配置用于所述第一控制器及第二控制器之间的信号通信。所述第一数传模块及第二数传模块配置用于所述第一控制器及第二控制器之间的信号通信,本实施例中第一数传模块及第二数传模块均采用AS01-ML01DP52.4G 100mw型号。
如图11所示,所述第三控制系统包括第三控制器、第五降压模块、第六降压模块、第三数传模块、电子调速器及第三电源。
所述第三电源配置用于对所述第三控制器、电子调速器及第五降压模块进行供电,本实施例中第三电源为6S16000MAH电池。
所述第五降压模块配置用于对所述第三电源的电压进行降压并对第六降压模块进行供电。本实施例中,第五降压模块采用HENGE 4A开关式UBEC,将第三电源的7V-26V的输入电源转换为12V电量。
所述第六降压模块配置用于对第五降压模块的电压进行降压并对所述第三数传模块进行供电。本实施例中,第六降压模块将第五降压模块的电量降压为3.3V电量为第三数传模块供电。
所述电子调速器设置四个,分别配置用于控制所述驱动电机870的转速。本实施例中,控制后置助推桨850的驱动电机870的电子调速器采用好盈铂金40A电子调速器,控制前置倾转桨860的驱动电机870的电子调速器采用好盈铂金60A电子调速器。
所述第三控制器配置用于通过第三数传模块与地面软件进行通信,分别向电子调速器、倾转舵机861、尾舵机及副翼舵机发送控制信号。本实施例中,第三控制器采用PIXHACK V3。
在一优选实施方式中,第三控制系统还包括电流计,所述电流计配置用于检测检测第三电源的电压及电流,并为第三控制器提供电量。
在一优选实施方式中,第三控制系统还包括外置的GPS模块,GPS模块配置用于检测无人机的位置信息并将位置信息发送置第三控制器。本优选方式中采用M8N GPS。
在一优选实施方式中,第三控制系统还包括空速传感器,空速传感器配置用于检测飞机相对空气的速度,并将空速信号通过I2C扩展板发送至第三控制器。
在一优选实施方式中,第三控制系统还包括通过云台布置的摄像机,摄像机将采集的图像信息发送至第三控制器。优选地,第三控制器上对应设置OSD及图传模块,第三控制器将图像信息通过OSD及图传模块发送至地面控制中心的显示屏上。本优选方式中,云台与第三控制器信号连接,第三控制器调整云台的设置角度。本优选方式中,图传模块采用欧姆威1W模块。
在一优选实施方式中,第三控制系统还包括外置的接收机,所述接收机配置用于无人机与遥控器之间进行信号通信。
在一优选实施方式中,第三控制系统还包括外置的安全开关和蜂鸣器模块,配置用于飞机的解锁和鸣响提示。
本文中应用了具体个例对本申请的原理及实施方式进行了阐述,以上实例的说明只是用于帮助理解本申请的方法及其核心思想。以上所述仅是本申请的优选实施方式,应当指出,由于文字表达的有限性,而客观上存在无限的具体结构,对于本技术领域的普通技术人员来说,在不脱离本申请原理的前提下,还可以做出若干改进、润饰或变化,也可以将上述技术特征以适当的方式进行组合;这些改进润饰、变化或组合,或未经改进将申请的构思和技术方案直接应用于其它场合的,均应视为本申请的保护范围。
一种物资投放无人机及控制系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0