

IPC分类号 : B64F1/00I,B64F1/02I,B64F1/22I,B63G11/00I,B63B39/00I








专利摘要
本发明涉及一种补偿式四自由度舰载起降平台,其包括底板、支撑立柱、连接横梁、前导向体、后导向体、伸出体、滑托、第一插锁装置、第一滑块、外起降组合平台、连杆机构和内起降平台。本发明提供一种补偿式四自由度舰载起降平台,能够在直升机着舰过程中补偿舰船的横摇、横荡、纵摇和垂荡四个自由度,极大地提高直升机着舰的安全性与稳定性。同时舰载起降平台能够与舰船的机库融为一体,在没有直升机着舰时,起降平台能够直接作为机库顶部,下方的空间则能够用作过道或者用来暂时停放直升机,既不会对舰船上的空间造成浪费,也不会影响舰船整体的美观。
权利要求
1.一种补偿式四自由度舰载起降平台,其特征在于,其包括底板、支撑立柱、连接横梁、前导向体、后导向体、伸出体、滑托、第一插锁装置、第一滑块、外起降组合平台、连杆机构和内起降平台,
所述支撑立柱均布设于所述底板的边角处,且每两个相邻所述支撑立柱的第一端设有所述连接横梁,所述前导向体的第一端通过转动副与所述底板的前端转动连接,所述后导向体的第一端与所述底板的后端固定连接,且所述后导向体的第二端与所述连接横梁固定连接;
所述伸出体分别设于所述前导向体和后导向体中,且所述伸出体通过第一移动副分别与所述前导向体和后导向体连接,所述伸出体的第一端通过球窝与所述第一滑块球副连接,所述滑托分别设于所述支撑立柱的内侧面,且通过第二移动副与所述支撑立柱连接,所述第一插锁装置设于所述滑托的第一端面,且通过所述第一插锁装置能将所述内起降平台和所述滑托锁定;
所述外起降组合平台包括中间平板、六套导向模块、第一折叠板、第二折叠板和六套第二插锁装置,所述中间平板的中间位置设有与所述内起降平台外形尺寸完全相同的通孔,所述六套导向模块前后对称设于所述中间平板的第一端面,且处于所述中间平板边角处的四套导向模块均通过第三移动副与所述第一滑块连接,所述六套第二插锁装置左右对称设于所述中间平板的第一端面,且通过所述六套第二插锁装置能将所述内起降平台与所述中间平板锁定,所述第一折叠板左右对称设于所述中间平板的第一侧面和第二侧面,且与所述中间平板转动副连接,所述第二折叠板前后对称设于所述中间平板的第三侧面和第四侧面,且与所述中间平板转动副连接,所述中间平板的第二端面还设有雷达测速测距传感器和双目成像测距仪,所述外起降组合平台前后对称设有所述连杆机构,所述连杆机构的长连杆通过转动副与所述第一滑块连接,所述连杆机构的第二滑块通过第四移动副与所述中间平板中部的导向模块连接;
所述连杆机构包括两个长连杆、两个短连杆和第二滑块,所述长连杆长度是所述短连杆长度的两倍,所述两个长连杆的第一端通过转动副连接,所述两个长连杆的第二端分别通过转动副与同一侧的所述第一滑块连接,所述两个短连杆的第一端通过转动副分别与所述两个长连杆的中间位置连接,所述两个短连杆的第二端通过转动副与所述第二滑块连接。
2.根据权利要求1所述的补偿式四自由度舰载起降平台,其特征在于,所述支撑立柱包括四个支撑立柱,所述四个支撑立柱均布设于所述底板的边角处,且所述四个支撑立柱的安装点依次连线围成长方形或正方形。
3.根据权利要求1所述的补偿式四自由度舰载起降平台,其特征在于,所述中间平板第一端面前端的三套导向模块等距布置且位于同一条直线上,所述中间平板第一端面后端的三套导向模块等距布置且位于同一条直线上。
4.根据权利要求1所述的补偿式四自由度舰载起降平台,其特征在于,所述前导向体的第二端通过平面副或圆弧导轨副分别与所述底板左右两侧的连接横梁连接。
5.根据权利要求1所述的补偿式四自由度舰载起降平台,其特征在于,所述内起降平台上设有镂空网格,四个系留装置设于所述内起降平台的第一端面,且呈圆周均匀布置。
6.根据权利要求1所述的补偿式四自由度舰载起降平台,其特征在于,所述连杆机构能够采用直线驱动单元,所述直线驱动单元包括四套直线驱动单元,所述四套直线驱动单元两两前后对称设于所述中间平板上,且所述四套直线驱动单元的固定端分别通过转动副与所述第一滑块连接,所述四套直线驱动单元的伸出端分别通过转动副与所述中间平板连接。
7.根据权利要求1所述的补偿式四自由度舰载起降平台,其特征在于,所述第三移动副为随动移动副,所述第一移动副、第二移动副、第四移动副以及直线驱动单元均为主动移动副,且所述第一移动副、第二移动副、第四移动副以及直线驱动单元能够采用液压驱动或电缸驱动,或者能够采用齿轮齿条驱动或丝杠驱动。
8.根据权利要求5所述的补偿式四自由度舰载起降平台,其特征在于,所述四个系留装置能够采用两自由度智能跟踪系留平台,所述两自由度智能跟踪系留平台包括导轨、移动平台和抓手,所述导轨通过移动副分别与所述外起降组合平台和内起降平台连接,所述移动平台安装于所述导轨上,且与所述导轨移动副连接,所述抓手通过转动副均布设于所述移动平台的边角处。
9.根据权利要求1所述的补偿式四自由度舰载起降平台,其特征在于,当所述前导向体的第一端与所述底板的前端固定连接,且所述伸出体的第一端通过转动副与所述第一滑块连接时,舰载起降平台具有三个自由度,构成三自由度舰载起降平台。
说明书
技术领域
本发明属于舰载起降平台技术领域,特别是涉及一种补偿式四自由度舰载起降平台。
背景技术
舰载起降平台主要应用于航海领域,由于风浪涌的作用以及舰船自身运动的影响,直升机在舰船上起降的过程中,直升机与舰船的运动状态无法保持一致,因此直升机着舰时有较大的概率发生事故,这对飞行员的人身安全以及设备的安全性来说是一个极大的隐患,因此直升机着舰的安全问题是亟待解决的。通过分析,舰船的运动是六个自由度的,包括横摇、纵摇、艏摇、横荡、纵荡、垂荡,其中舰船的纵荡对直升机着舰的影响极小,几乎能够忽略,而舰船的艏摇幅度很小,对直升机着舰的影响也可忽略。由此,凭借多年从事相关行业的经验与实践,本发明人提出一种补偿式四自由度舰载起降平台,以克服现有技术的缺陷,它能够在直升机着舰过程中补偿四个自由度,极大地提高直升机着舰的安全性与稳定性。
申请号为201610114472.9的专利文献中公开了一种基于六自由度并联平台的复合式舰载抗冲稳定平台及方法,该稳定平台分为上下两套六自由度并联平台,下方被动减震,上方主动稳定,虽然能够很好地隔离舰船六维摇荡动作还能够抗冲,但是它多补偿了两个自由度,控制复杂;而且它最上方的起降平台无法降落到舰船甲板的高度,从而直升机无法方便地从稳定平台上移入机库;其次它无法融入到机库中去,占用了舰船较大的空间,在闲置时完全没有其他作用,还在一定程度上影响了舰船的美观。
发明内容
针对以上情况,本发明提供一种补偿式四自由度舰载起降平台,能够在直升机着舰过程中补偿四个自由度,极大地提高直升机着舰的安全性与稳定性。同时,补偿式四自由度舰载起降平台能够与舰船的机库融为一体,在没有直升机着舰时,起降平台能够直接作为机库顶部,下方的空间则能够用作过道或者用来暂时停放直升机,既不会对舰船上的空间造成浪费,也不会影响舰船整体的美观。
本发明采用的技术方案是,一种补偿式四自由度舰载起降平台,其包括底板、支撑立柱、连接横梁、前导向体、后导向体、伸出体、滑托、第一插锁装置、第一滑块、外起降组合平台、连杆机构和内起降平台,所述支撑立柱均布设于所述底板的边角处,且每两个相邻所述支撑立柱的第一端设有所述连接横梁,所述前导向体的第一端通过转动副与所述底板的前端转动连接,所述后导向体的第一端与所述底板的后端固定连接,且所述后导向体的第二端与所述连接横梁固定连接;所述伸出体分别设于所述前导向体和后导向体中,且所述伸出体通过第一移动副分别与所述前导向体和后导向体连接,所述伸出体的第一端通过球窝与所述第一滑块球副连接,所述滑托分别设于所述支撑立柱的内侧面,且通过第二移动副与所述支撑立柱连接,所述第一插锁装置设于所述滑托的第一端面,且通过所述第一插锁装置能将所述内起降平台和所述滑托锁定;以及所述外起降组合平台包括中间平板、六套导向模块、第一折叠板、第二折叠板和六套第二插锁装置,所述中间平板的中间位置设有与所述内起降平台外形尺寸完全相同的通孔,所述六套导向模块前后对称设于所述中间平板的第一端面,且处于所述中间平板边角处的四套导向模块均通过第三移动副与所述第一滑块连接,所述六套第二插锁装置左右对称设于所述中间平板的第一端面,且通过所述六套第二插锁装置能将所述内起降平台与所述中间平板锁定,所述第一折叠板左右对称设于所述中间平板的第一侧面和第二侧面,且与所述中间平板转动副连接,所述第二折叠板前后对称设于所述中间平板的第三侧面和第四侧面,且与所述中间平板转动副连接,所述中间平板的第二端面还设有雷达测速测距传感器和双目成像测距仪,所述外起降组合平台前后对称设有所述连杆机构,所述连杆机构的长连杆通过转动副与所述第一滑块连接,所述连杆机构的第二滑块通过第四移动副与所述中间平板中部的导向模块连接。
进一步地,所述连杆机构包括两个长连杆、两个短连杆和第二滑块,所述长连杆长度是所述短连杆长度的两倍,所述两个长连杆的第一端通过转动副连接,所述两个长连杆的第二端分别通过转动副与同一侧的所述第一滑块连接,所述两个短连杆的第一端通过转动副分别与所述两个长连杆的中间位置连接,所述两个短连杆的第二端通过转动副与所述第二滑块连接。
优选地,所述支撑立柱包括四个支撑立柱,所述四个支撑立柱均布设于所述底板的边角处,且所述四个支撑立柱的安装点依次连线围成长方形或正方形。
优选地,所述中间平板第一端面前端的三套导向模块等距布置且位于同一条直线上,所述中间平板第一端面后端的三套导向模块等距布置且位于同一条直线上。
优选地,所述前导向体的第二端通过平面副或圆弧导轨副分别与所述底板左右两侧的连接横梁连接。
进一步地,所述内起降平台上设有镂空网格,四个系留装置设于所述内起降平台的第一端面,且呈圆周均匀布置。
优选地,所述连杆机构能够采用直线驱动单元,所述直线驱动单元包括四套直线驱动单元,所述四套直线驱动单元两两前后对称设于所述中间平板上,且所述四套直线驱动单元的固定端分别通过转动副与所述第一滑块连接,所述四套直线驱动单元的伸出端分别通过转动副与所述中间平板连接。
优选地,所述第三移动副为随动移动副,所述第一移动副、第二移动副、第四移动副以及直线驱动单元均为主动移动副,且所述第一移动副、第二移动副、第四移动副以及直线驱动单元能够采用液压驱动或电缸驱动,或者能够采用齿轮齿条驱动或丝杠驱动。
进一步地,所述四个系留装置能够采用两自由度智能跟踪系留平台,所述两自由度智能跟踪系留平台包括导轨、移动平台和抓手,所述导轨通过移动副分别与所述外起降组合平台和内起降平台连接,所述移动平台安装于所述导轨上,且与所述导轨移动副连接,所述抓手通过转动副均布设于所述移动平台的边角处。
优选地,当所述前导向体的第一端与所述底板的前端固定连接,且所述伸出体的第一端通过转动副与所述第一滑块连接时,舰载起降平台具有三个自由度,构成三自由度舰载起降平台。
本发明的特点和有益效果是:
1、本发明提供的一种补偿式四自由度舰载起降平台,能够在直升机着舰过程中,通过控制伸出体的运动补偿舰船的横摇、纵摇和垂荡三个自由度,同时通过驱动第二滑块协同运动补偿舰船的横荡自由度,极大地提高直升机着舰的安全性与稳定性。
2、本发明提供的一种补偿式四自由度舰载起降平台,能够与舰船的机库融为一体,在没有直升机着舰时,内起降平台能够直接作为机库顶部,下方的空间则能够用作过道或者用来暂时停放直升机。
3、本发明提供的一种补偿式四自由度舰载起降平台,合理运用空间,既不会对舰船上的空间造成浪费,也不会影响舰船整体的美观。
附图说明
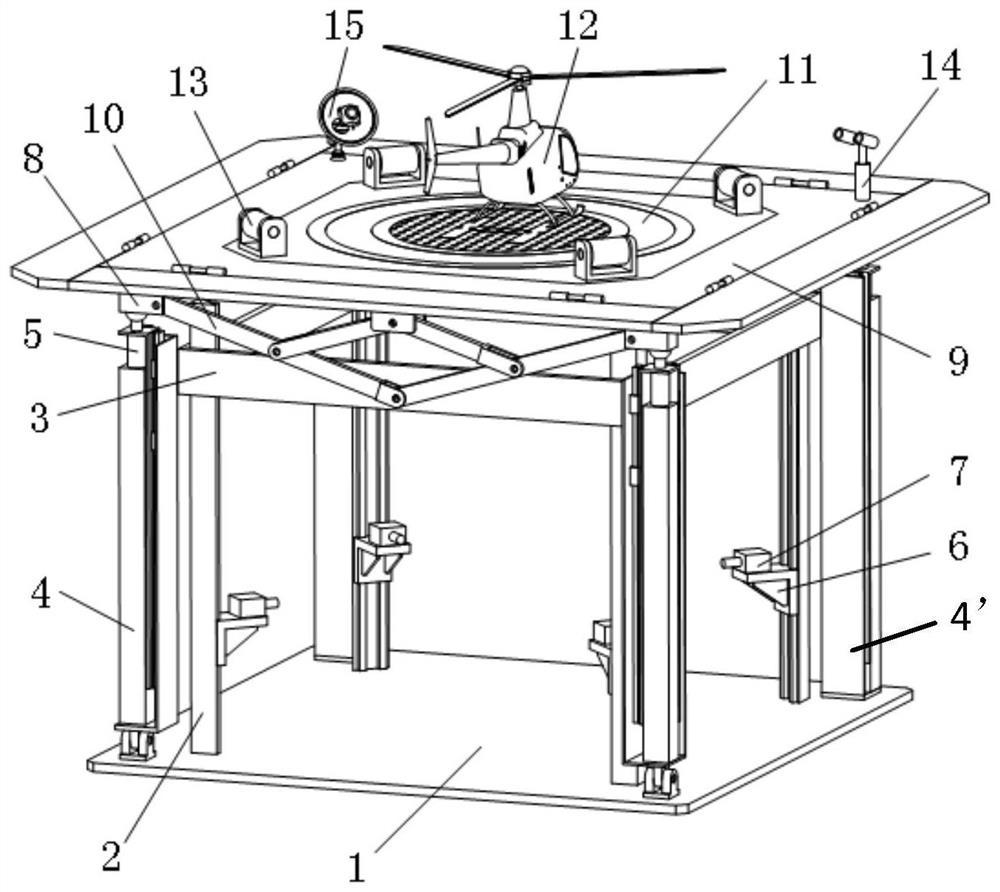
图1为本发明的整体结构示意图;
图2为本发明第一状态下的结构示意图;
图3为本发明第二状态下的结构示意图;
图4为本发明外起降组合平台在平展状态下的结构示意图;
图5为本发明外起降组合平台在折叠状态下的结构示意图;
图6为本发明连杆机构的结构示意图;
图7为本发明将连杆机构替换为直线驱动单元的结构示意图;
图8为本发明两自由度智能跟踪系留平台的结构示意图;
图9为本发明四自由度舰载起降平台变为三自由度时的结构示意图;以及
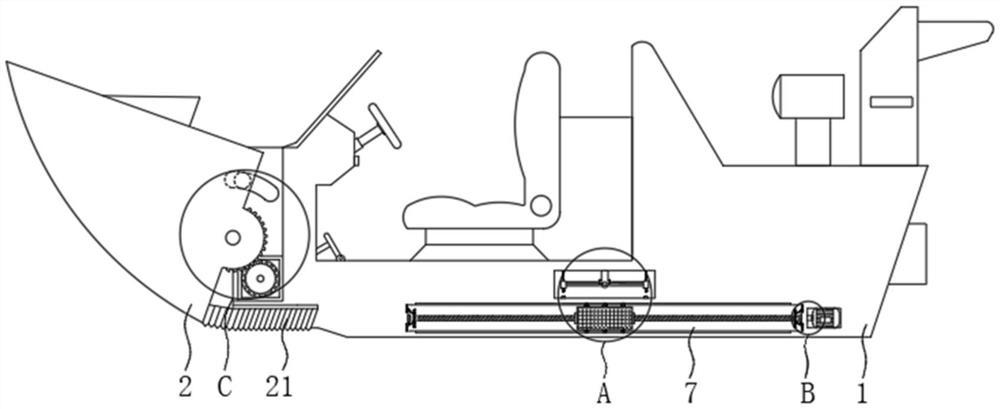
图10为本发明舰载起降平台安装在舰船上的整体效果图。
主要附图标记:
底板1;支撑立柱2;连接横梁3;前导向体4;后导向体4’;伸出体5;滑托6;第一插锁装置7;第一滑块8;外起降组合平台9;中间平板901;导向模块902;第一折叠板903;第二折叠板904;第二插锁装置905;连杆机构10;长连杆1001;短连杆1002;第二滑块1003;内起降平台11;直升机12;系留装置13;双目成像测距仪14;雷达测速测距传感器15;直线驱动单元16;两自由度智能跟踪系留平台17;导轨1701;移动平台1702;抓手1703;舰船18。
具体实施方式
为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
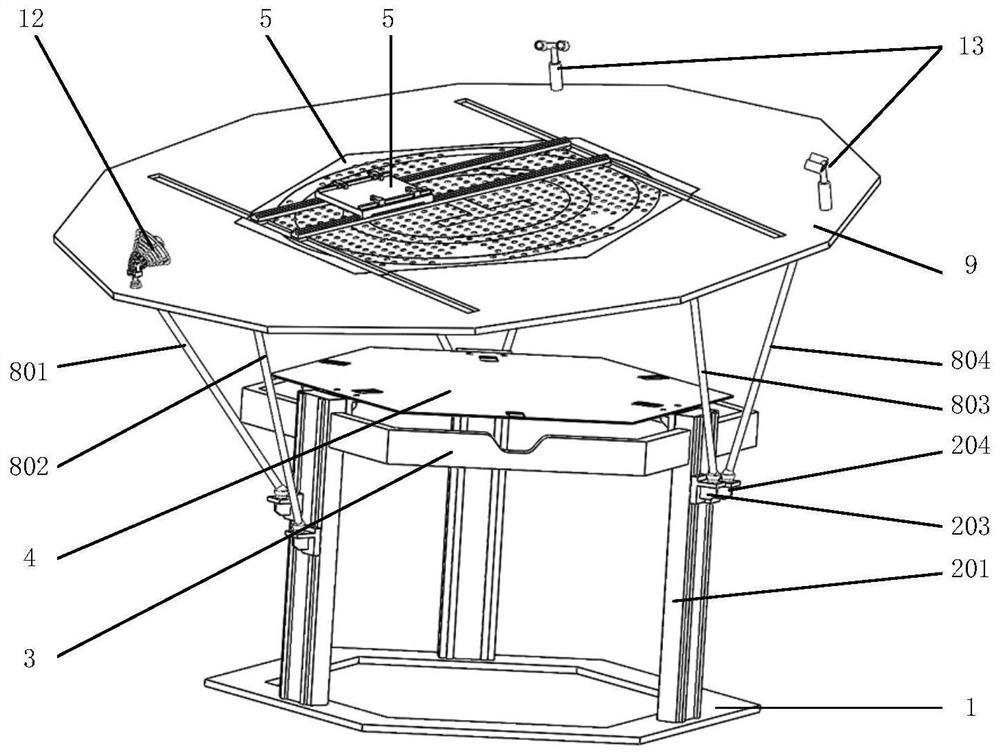
本发明提供一种补偿式四自由度舰载起降平台,如图1~图3所示,其包括底板1、支撑立柱2、连接横梁3、前导向体4、后导向体4’、伸出体5、滑托6、第一插锁装置7、第一滑块8、外起降组合平台9、连杆机构10和内起降平台11,支撑立柱2均布设于底板1的边角处,且每两个相邻支撑立柱2的第一端设有连接横梁3,前导向体4的第一端通过转动副与底板1的前端转动连接,后导向体4’的第一端与底板1的后端固定连接,且后导向体4’的第二端与连接横梁3固定连接,伸出体5分别设于前导向体4和后导向体4’中,且伸出体5通过第一移动副分别与前导向体4和后导向体4’连接,伸出体5的第一端通过球窝与第一滑块8球副连接,滑托6分别设于支撑立柱2的内侧面,且通过第二移动副与支撑立柱2连接,第一插锁装置7设于滑托6的第一端面,且通过第一插锁装置7能将内起降平台11和滑托6锁定。
具体的,支撑立柱2包括四个支撑立柱2,四个支撑立柱2均布设于底板1的边角处,且四个支撑立柱2的安装点依次连线围成长方形或正方形。
前导向体4的第二端通过平面副或圆弧导轨副分别与底板1左右两侧的连接横梁3连接。
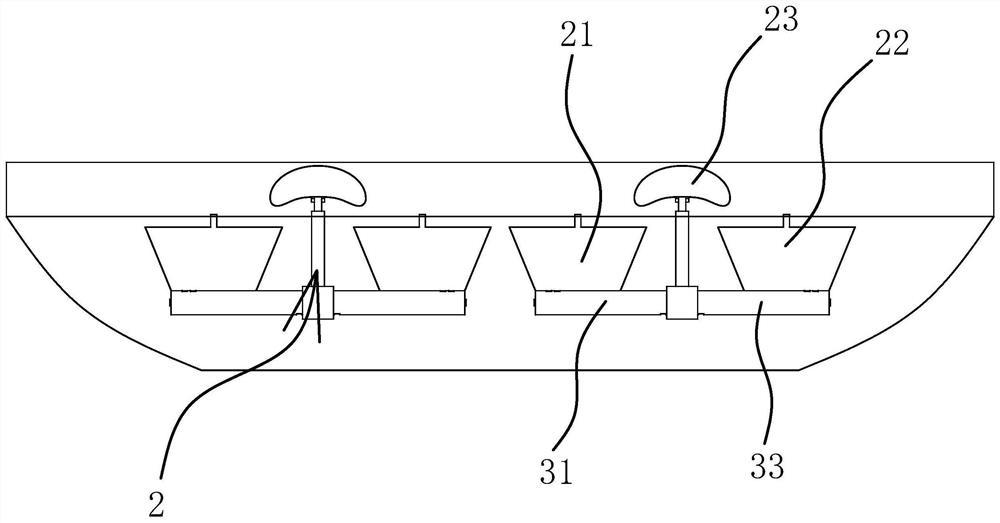
如图4和图5所示,外起降组合平台9包括中间平板901、六套导向模块902、第一折叠板903、第二折叠板904和六套第二插锁装置905,中间平板901的中间位置设有与内起降平台11外形尺寸完全相同的通孔,六套导向模块902前后对称设于中间平板901的第一端面,且处于中间平板901边角处的四套导向模块902均通过第三移动副与第一滑块8连接,六套第二插锁装置905左右对称设于中间平板901的第一端面,且通过六套第二插锁装置905能将内起降平台11与中间平板901锁定,第一折叠板903左右对称设于中间平板901的第一侧面和第二侧面,且与中间平板901转动副连接,第二折叠板904前后对称设于中间平板901的第三侧面和第四侧面,且与中间平板901转动副连接;外起降组合平台9处于平展状态时,两块第一折叠板903、两块第二折叠板904和中间平板901保持平齐,在此基础上,两块第一折叠板903向上翻折90度,并且两块第二折叠板904也向上翻折90度后,此时外起降组合平台9处于折叠状态。
具体的,中间平板901第一端面前端的三套导向模块902等距布置且位于同一条直线上,中间平板901第一端面后端的三套导向模块902等距布置且位于同一条直线上,中间平板901的第二端面还设有雷达测速测距传感器15和双目成像测距仪14。
在第一状态下,内起降平台11通过六套第二插锁装置905与外起降组合平台9进行锁定连接;在第二状态下,内起降平台11通过四套第一插锁装置7与四个滑托6进行锁定连接。
内起降平台11上设有镂空网格,四个系留装置13设于内起降平台11的第一端面,且呈圆周均匀布置。
如图6所示,连杆机构10包括两个长连杆1001、两个短连杆1002和第二滑块1003,长连杆1001长度是短连杆1002长度的两倍,两个长连杆1001的第一端通过转动副连接,两个长连杆1001的第二端分别通过转动副与同一侧的第一滑块8连接,两个短连杆1002的第一端通过转动副分别与两个长连杆1001的中间位置连接,两个短连杆1002的第二端通过转动副与第二滑块1003连接,第二滑块1003通过第四移动副与中间平板901中部的导向模块902连接。
如图7所示,连杆机构10能够采用直线驱动单元16,直线驱动单元16包括四套直线驱动单元16,四套直线驱动单元16两两前后对称设于中间平板901上,且四套直线驱动单元16的固定端分别通过转动副与第一滑块8连接,四套直线驱动单元16的伸出端分别通过转动副与中间平板901连接。
具体的,第三移动副为随动移动副,第一移动副、第二移动副、第四移动副以及直线驱动单元16均为主动移动副,且第一移动副、第二移动副、第四移动副以及直线驱动单元16能够采用液压驱动、电缸驱动,亦能够采用齿轮齿条驱动、丝杠驱动。
如图8所示,四个系留装置13能够采用两自由度智能跟踪系留平台17,两自由度智能跟踪系留平台17包括导轨1701、移动平台1702和抓手1703,导轨1701通过移动副分别与外起降组合平台9和内起降平台11连接,移动平台1702安装于导轨1701上,且与导轨1701移动副连接,抓手1703通过转动副均布设于移动平台1702的边角处。
两自由度智能跟踪系留平台17的具体工作过程:直升机12在接近整个起降平台的过程中,两自由度智能跟踪系留平台17通过两个移动副调整移动平台1702的位置并实时追踪直升机12,待直升机12落到移动平台1702上后,四个抓手1703抓住直升机12的滑撬实现系留,再通过两个移动副调整移动平台1702的位置,使直升机12处于内起降平台11中心的位置。
如图9所示,当前导向体4的第一端与底板1的前端固定连接,且伸出体的第一端通过转动副与第一滑块连接,处于底板1左侧的两个伸出体5做同步运动,处于底板1右侧的两个伸出体5也做同步运动,且伸出体5的第一端通过移动副与第一滑块8连接时,舰载起降平台具有三个自由度,构成三自由度舰载起降平台,能够补偿舰船横摇、横荡和垂荡运动。
本发明的具体操作步骤如下:
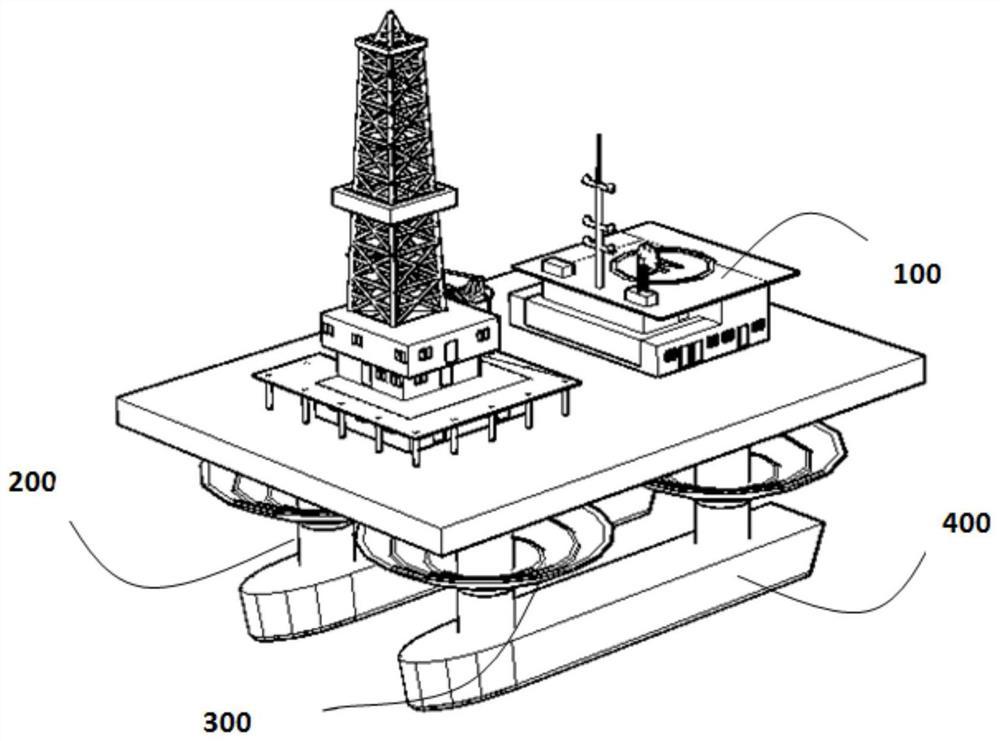
如图9和图10所示,直升机12着舰时,外起降组合平台9处于平展状态下,并与舰船18的机库顶重合,内起降平台11通过六套第二插锁装置905与外起降组合平台9进行锁定连接,从而内起降平台11和外起降组合平台9成为一个整体,并通过驱动四个伸出体5使外起降组合平台9高于机库顶一定距离,再控制四个伸出体5的运动使外起降组合平台9补偿舰船18的四个自由度,使外起降组合平台9的运动状态与直升机12的运动状态基本一致,通过着舰引导毫米波雷达测速测距传感器15和着舰引导红外双目成像测距仪14的引导,直升机12降落到内起降平台11上后,内起降平台11上的系留装置13将直升机12系留在内起降平台11上,然后外起降组合平台9转到折叠状态下,接着外起降组合平台9回到机库顶,解开外起降组合平台9上的六套第二插锁装置905,从而内起降平台11与外起降组合平台9分离开来,再通过四套第一插锁装置7将内起降平台11和四个滑托6连接成一个整体,随后驱动滑托6带着内起降平台11沿着四个支撑立柱2向下运动到底板1上,然后解开这四套第一插锁装置7,将直升机12拉入机库。
本发明在使用时,四个自由度是这样补偿的:通过控制四个伸出体5的运动补偿舰船18的横摇、纵摇和垂荡三个自由度,再通过驱动两个第二滑块1003或者四套直线驱动单元16协同运动以补偿舰船18的横荡自由度。
直升机12从机库到起飞离舰的过程与直升机12着舰到进入机库的过程相反,首先外起降组合平台9处于折叠状态下,此时外起降组合平台9在机库顶上,内起降平台11通过四套第一插锁装置7与四个滑托6连接成一个整体,此时内起降平台11在底板1上,将直升机12从机库拉到内起降平台11上,并通过系留装置13系留在内起降平台11上,再通过驱动滑托6将内起降平台11升到与外起降组合平台9持平的位置,然后解开这四套第一插锁装置7,再通过六套第二插锁装置905将内起降平台11与外起降组合平台9锁定连接在一块,然后通过驱动四个伸出体5使外起降组合平台9高于机库顶一定距离,再将外起降组合平台9转到平展状态下,并控制四个伸出体5的运动使外起降组合平台9补偿舰船18的四个自由度,使直升机12与海平面保持平行,从而直升机12的起飞过程不会受到舰船18运动的影响,待直升机12安全飞离舰船18后,控制四个伸出体5的运动使外起降组合平台9回到机库顶。
本发明在使用时,还能够作为舰船18的一个观景台,先使该补偿式四自由度舰载起降平台处于第一状态,外起降组合平台9与机库顶贴合,待相关人员来到内起降平台11上后,外起降组合平台9转到折叠状态,从而起到护栏的作用,然后通过驱动四个伸出体5使外起降组合平台9高于机库顶一定距离,再控制外起降组合平台9的运动来补偿舰船18的四个自由度,使外起降组合平台9与海平面保持平行,方便相关人员眺望海景。
本发明提供一种补偿式四自由度舰载起降平台,能够在直升机着舰过程中补偿四个自由度,极大地提高直升机着舰的安全性与稳定性。同时,补偿式四自由度舰载起降平台能够与舰船的机库融为一体,在没有直升机着舰时,起降平台能够直接作为机库顶部,下方的空间则能够用作过道或者用来暂时停放直升机,既不会对舰船上的空间造成浪费,也不会影响舰船整体的美观。
以上所述是本申请的优选实施方式,不以此限定本发明的保护范围,应当指出,对于该技术领域的普通技术人员来说,在不脱离本技术原理前提下,还能够做出若干改进和润饰,这些改进和润饰也应视为本申请的保护范围。
补偿式四自由度舰载起降平台专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0