







专利摘要
本发明公开一种智能跌倒监护装置及其处理方法,该监护装置包括:警报模块、信号采集模块和信号处理模块,其中,信号采集模块包括三轴加速度传感器、气压传感器和压力传感器,用于采集人体姿态实时数据、气压高度数据和压力数据;信号处理模块包括跌倒检测单元,跌倒检测单元设置为根据采集的人体姿态实时数据、气压高度数据和压力数据进行分析处理,以判断人体跌倒状态,当判断人体发生跌倒时输出第一信号至警报模块;警报模块根据第一信号生成并输出警报信息。本发明的智能跌倒监护装置及其处理方法通过采集三轴加速度、高度和压力数据进行跌倒检测,有效考虑人体的行为特征,正确率更高。
权利要求
1.智能跌倒监护装置,包括:警报模块、信号采集模块和信号处理模块,其中,
所述信号采集模块包括三轴加速度传感器、气压传感器和压力传感器,用于采集人体姿态实时数据、气压高度数据和压力数据并存储;
所述信号处理模块包括跌倒检测单元,所述跌倒检测单元设置为根据存储的人体姿态实时数据判断出现巨变数据的时间点,并根据出现巨变数据的时间点和存储的人体姿态实时数据生成巨变之前的一段时间内和巨变之后的一段时间内的人体躯干方向的加速度均值、巨变之后的一段时间内的三轴加速度变化之和,根据出现巨变数据的时间点和存储的气压高度数据生成巨变前后的人体气压高度差,根据出现巨变数据的时间点和存储的压力数据生成巨变前后身体一侧与另一侧的压力差之和,根据生成的巨变之前的一段时间内和巨变之后的一段时间内的人体躯干方向的加速度均值、巨变之后的一段时间内的三轴加速度变化之和、人体气压高度差和压力差之和判断人体跌倒状态,当判断人体发生跌倒时输出第一信号至警报模块;
所述警报模块根据所述第一信号生成并输出警报信息。
2.根据权利要求1所述的监护装置,其特征在于,所述信号采集模块还用于采集装置佩戴信息,所述信号处理模块还包括装置佩戴检测单元,所述装置佩戴检测单元设置为根据所述装置佩戴信息进行分析处理,输出佩戴状态标识;
所述跌倒检测单元根据所述输出的佩戴状态标识,检测人体跌倒状态和向所述警报模块输出第一信号;
其中,所述装置佩戴信息包括三轴加速度信号、佩戴部位压力信号、温度信号和人体生物电信号的其中之一或者两者以上的组合。
3.根据权利要求1或2所述的监护装置,其特征在于,还包括定位模块和无线通讯模块,所述定位模块采集所述监护装置的位置信息,所述警报模块通过所述无线通讯模块发送含有所述位置信息的警报信息至远程终端。
4.根据权利要求3所述的监护装置,其特征在于,所述信号处理模块还包括跌倒后状态检测单元,设置为根据所述信号采集模块采集的数据,检测跌倒后的人体状态,当判断人体解除跌倒状态时,向所述警报模块发送第二信号,所述警报模块根据所述第二信号,通过无线通讯模块发送脱离跌倒的信息至远程终端。
5.智能跌倒监护装置的处理方法,该监护装置包括警报模块、信号采集模块和信号处理模块,所述处理方法包括:
信号采集模块实时采集用户行为信息数据,输出至信号处理模块,所述用户行为信息数据包括三轴加速度数据、气压高度数据和压力数据;
信号处理模块根据所述用户行为信息数据判断人体跌倒状态,当判断人体发生跌倒时,输出第一信号至警报模块;
警报模块根据所述第一信号生成并输出警报信息;
其中,所述信号处理模块根据所述用户行为信息数据判断人体跌倒状态包括:
a、存储一定时间间隔内三轴加速度传感器采集的加速度数据、气压传感器采集的气压高度数据和压力传感器采集的压力数据;
b、根据存储的加速度数据判断所述一定时间间隔内是否出现巨变的数据,根据巨变数据的时间点,计算巨变之前的一段时间内和巨变之后的一段时间内的人体躯干方向的加速度均值AY_1和AY_2、巨变之后的一段时间内的三轴加速度变化之和ACC_SUM、巨变前后的人体气压高度差H2-H1、及巨变前后身体一侧与另一侧的压力差之和∑|Pi1-Pi2|;
c、设定阈值TH3、TH4、TH5,判断是否满足条件H2-H1>TH3、ACC_SUM<TH4及∑|Pi1-Pi2|>TH5,且AY_1接近于重力加速度g,AY_2接近于0,如果满足,则判断人体发生跌倒。
6.根据权利要求5所述的方法,其中,所述步骤b包括:
根据所述存储的一定时间间隔内的三轴加速度数据,对每次采集的三轴加速度数据,计算其三轴加速度幅值ACC,判断ACC是否大于设定的阈值TH1,当大于设定阈值时,判断此次数据采集的时间点即是出现数据巨变的时间点;
根据所述存储的三轴加速度数据,计算巨变前后时间段内的加速度数据变化量ACC_CHG,判断所述加速度数据变化量ACC_CHG是否大于设定阈值,如果大于设定阈值,则判断巨变前后的时间段即是发生跌倒的瞬间;
根据所述存储的三轴加速度数据,计算巨变前的一段时间内的人体躯干方向的加速度数据均值AY_1、巨变后的一段时间内的人体躯干方向的加速度均值AY_2、巨变后的一段时间内的三轴加速度变化之和ACC_SUM、巨变前后的人体气压高度值H2-H1及巨变前后佩戴装置部位的身体一侧与另一侧压力差之和∑|Pi1-Pi2|。
7.根据权利要求5所述的方法,还包括:
所述信号采集模块实时采集装置佩戴信息数据,输出至所述信号处理模块;
所述信号处理模块根据所述装置佩戴信息数据判断装置佩戴状态,输出装置佩戴状态标识;
信号处理模块读取所述佩戴状态标识进行判断,当佩戴状态标识为正确佩戴时,进行人体跌倒检测,并在判断人体发生跌倒时输出第一信号至警报模块。
8.根据权利要求7所述的方法,其中,所述装置佩戴信息数据包括温度数据、人体生物电信号、佩戴部位压力数据和三轴加速度数据的其中之一或两者以上的组合。
9.根据权利要求8所述的方法,其中,所述信号处理模块根据所述装置佩戴信息数据进行以下A至D分析处理的其中之一或两者以上的组合,以生成并输出装置佩戴状态标识:
A、读取温度传感器的贴近人体一侧的温度数据T1及暴露于空气中一侧的温度数据T2,在判断T1和T2的温度差大于设定阈值时,设置佩戴状态标识为正确佩戴,否则设置佩戴状态标识为佩戴有误;
B、读取人体生物电传感器输出的人体生物电信号,在判断人体生物电信号为高电平时设置佩戴状态标识为正确佩戴,否则设置佩戴状态标识为佩戴有误;
C、根据录入信息获取用户腰围值L,根据矩阵式分布的压力传感器间距D计算产生压力的传感器的个数N=L/D,读取N个压力传感器的压力数据P1…PN,在判断N个压力传感器的压力数据都等于设定阈值时,设置佩戴状态标识为正确佩戴,否则设置佩戴状态标识为佩戴有误;
D、读取三轴加速度传感器的三个轴方向上的加速度值,在判断代表人体躯干方向的加速度值为g且其他两个加速度值为0时,设置佩戴状态标识为正确佩戴,否则设置佩戴状态标识为佩戴有误,
其中,在进行两者以上的组合分析处理时,任一方式下判断为佩戴有误时,即设置为佩戴有误标识。
10.根据权利要求5至9任一项所述的方法,其中,所述装置还包括定位模块和无线通讯模块,所述方法还包括:
所述定位模块采集所述监护装置的位置信息,
所述警报模块通过所述无线通讯模块发送警报信息至远程终端,所述警报信息包括从所述定位模块获取的位置信息和求救内容。
11.根据权利要求10所述的方法,还包括:
当人体处于跌倒状态时,所述信号采集模块持续采集三轴加速度数据、气压高度数据及压力数据并存储;
信号处理模块根据实时更新的三轴加速度数据、气压高度数据及压力数据判断人体解除跌倒的状态,当判断人体解除跌倒时,向警报模块发送第二信号,所述警报模块根据第二信号,通过无线通讯模块发送脱离跌倒的信息至远程终端。
12.根据权利要求11所述的方法,其中,所述信号处理模块根据实时更新的三轴加速度数据、气压高度数据及压力数据进行分析处理,判断人体解除跌倒的状态包括:
计算发生跌倒后一段时间内的代表人体躯干方向的轴的加速度均值AY_3;
判断加速度均值AY_3、气压高度值H3及压力值P13,P23,…,PN3是否满足条件:|AY_3-g|<TH6、H3-H2>TH7且P13=P23=...=PN3,其中, TH6和TH7为设定的阈值,如满足条件,则判断人体解除跌倒状态。
13.根据权利要求12所述的方法,还包括:
接收通过按钮的信号输入,播放或停止扬声器警报和发送求救信息或解除求救信息至远程终端。
说明书
技术领域
本发明涉及智能化的安全产品,尤其涉及一种智能跌倒监护装置及其处理方法。
背景技术
随着时代的发展,现代人的生活标准不断提高,人们也越来越重视健康问题。同时,我国正在进入到老龄化社会,孤寡老人变为一个不可忽视的大群体,更多的年轻人由于工作或其他原因不能陪伴老人,导致老人无人看护,出现老人发生跌倒后无人帮忙从而造成更大身心伤害。所以,通过智能穿戴设备来帮助老人在出现跌倒意外后及时通知到监护人或者及时报警到相关医护人员,使得老人能够在最短的时间得到帮助,非常必要。
目前关于跌倒方面的检测技术,通用的方法是通过加速度传感器来检测在跌倒的过程中身体碰撞到地面时的剧烈变化的信号以及跌倒后一段时间内无法动弹的一段相对静止信号,来判断老人是否跌倒,从而报警,这为老人的跌倒监护提供了便利。然而,基于加速度和角度检测实现的跌倒检测装置,没有充分考虑到人体运动行为特点等因素,无法区分跑跳、弯腰等动作,使得误判率较高。并且,目前的跌倒检测装置并没有解决装置人为或意外脱离身体时导致误报的问题。
发明内容
根据本发明的一个方面,提供了一种智能跌倒监护装置,包括:警报模块、信号采集模块和信号处理模块,其中,
所述信号采集模块包括三轴加速度传感器、气压传感器和压力传感器,用于采集人体姿态实时数据、气压高度数据和压力数据;
所述信号处理模块包括跌倒检测单元,所述跌倒检测单元设置为根据所述采集的人体姿态实时数据、气压高度数据和压力数据进行分析处理,以判断人体跌倒状态,当判断人体发生跌倒时输出第一信号至警报模块;
所述警报模块根据所述第一信号生成并输出警报信息。
本发明的监护装置通过采集三轴加速度、高度和压力数据进行跌倒检测,综合考虑人体的行为特征和其它环境特征,跌倒检测的正确率更高。
在一些实施方式中,所述信号采集模块还用于采集装置佩戴信息,所述信号处理模块还可包括装置佩戴检测单元,所述装置佩戴检测单元设置为根据装置佩戴信息进行分析处理,输出佩戴状态标识;所述跌倒检测单元根据所述输出的佩戴状态标识,检测人体跌倒状态和向所述警报模块输出第一信号;其中,所述装置佩戴信息包括三轴加速度信号、佩戴部位压力信号、温度信号和人体生物电信号的其中之一或者两者以上的组合。由此,可以检测出装置的佩戴方向和/或佩戴位置是否正确,在装置佩戴正确时才进行跌倒检测,实现避免佩戴不正确导致的误报的不良,进一步提高跌倒检测的准确率。
在一些实施方式中,所述信号采集模块还包括温度传感器和/或人体生物电传感器,所述装置佩戴检测单元根据所述三轴加速度传感器采集的加速度信号、所述压力传感器采集的压力信号、所述温度传感器采集的温度信号和所述人体生物电传感器采集的人体生物电信号的其中之一或两者以上的组合,进行分析处理,输出佩戴状态标识。由此,可以进一步检测装置有无佩戴的情况,实现避免装置没有佩戴情况下导致误报的不良,提高装置佩戴和跌倒检测的准确率。
在一些实施方式中,所述装置还包括定位模块和无线通讯模块,所述定位模块采集所述监护装置的位置信息,所述警报模块通过无线通讯模块发送含有位置信息的警报信息至远程终端。由此,可以在发生跌倒危险时,及时通知监护人,并把位置信息提供给监护人,以获得有效的及时的帮助。
在一些实施方式中,所述信号处理模块还包括跌倒后状态检测单元,设置为根据所述信号采集模块采集的数据,检测跌倒后的人体状态。当判断人体解除跌倒状态时,向所述警报模块发送第二信号,所述警报模块根据所述第二信号,通过无线通讯模块发送脱离跌倒的信息至远程终端。由此,可以进一步检测用户跌倒后的处理情况,以便在用户脱离跌倒状态后及时通知监护人,为监护人带来了方便,有效提升了用户体验。并且,及时解除警报,可以减少在警报中装置的消耗,降低装置的功耗。
在一些实施方式中,所述警报模块包括根据第一信号启动扬声器进行求救语音播报和根据第二信号停止播放扬声器求救信号。由此,可以实现在向监护人通知求救的同时,向周围人发出求救,以使使用者及时得到救助,脱离险境,增加安全保障。
在一些实施方式中,该装置还包括人机交互模块,设置为通过触摸屏、按钮或语音接收用户输入,根据用户输入录入用户基本信息或启动所述警报模块进行求救或解除求救的处理。由此,用户可以通过触摸屏录入用户信息,以方便装置根据用户信息进行分析处理,也能够实现在装置发生检测误报时,用户通过按钮进行求救或解除误报求救,能够有效改善用户体验,快捷方便。
根据本发明的另一个方面,还提供了一种智能跌倒监护装置的处理方法,该监护装置包括警报模块、信号采集模块和信号处理模块,所述处理方法包括:
信号采集模块实时采集用户行为信息数据,输出至信号处理模块,所述用户行为信息数据包括三轴加速度数据、气压高度数据和压力数据;
信号处理模块根据所述用户行为信息数据进行分析处理,判断人体跌倒状态,当判断人体发生跌倒时,输出第一信号至警报模块;
警报模块根据所述第一信号生成并输出警报信息。
本发明的方法通过采集三轴加速度、高度和压力数据进行跌倒检测,综合考虑人体的行为特征和其它环境特征,跌倒检测的正确率更高。
在一些实施方式中,所述信息处理模块根据所述用户行为信息数据进行分析处理,判断人体跌倒状态包括:
a、存储一定时间间隔内三轴加速度传感器采集的加速度数据、气压传感器采集的气压高度数据和压力传感器采集的压力数据;
b、根据存储的加速度数据判断所述一定时间间隔内是否出现巨变的数据,根据巨变数据的时间点,计算巨变之前的一段时间内和巨变之后的一段时间内的人体躯干方向的加速度均值AY_1和AY_2、巨变之后的一段时间内的三轴加速度变化之和ACC_SUM、巨变前后的人体气压高度差H2-H1、及巨变前后身体一侧与另一侧的压力差之和∑|Pi1-Pi2|;
c、设定阈值TH3、TH4、TH5,判断是否满足条件H2-H1>TH3、ACC_SUM<TH4及∑|Pi1-Pi2|>TH5,且AY_1接近于重力加速度g,AY_2接近于0,如果满足,则判断人体发生跌倒。
由此,通过三轴加速度判断人体的跌倒和平躺的姿态变化,通过高度数据判断装置离地面的高度变化,通过压力数据判断佩戴部位一周的受压力度变化,能够结合用户姿态和行为特征,更加准确地检测出人体是否发生跌倒。
在一些实施方式中,所述步骤b包括:
根据所述存储的一定时间间隔内的三轴加速度数据,对每次采集的三轴加速度数据,计算其三轴加速度幅值ACC,判断ACC是否大于设定的阈值TH1,当大于设定阈值时,判断此次数据采集的时间点即是出现数据巨变的时间点;
根据所述存储的三轴加速度数据,计算巨变前后时间段内的加速度数据变化量ACC_CHG,判断所述加速度数据变化量ACC_CHG是否大于设定阈值,如果大于设定阈值,则判断巨变前后时间段即是发生跌倒的瞬间;
根据所述存储的三轴加速度数据,计算巨变前的一段时间内的人体躯干方向的加速度数据均值AY_1、巨变后的一段时间内的人体躯干方向的加速度均值AY_2、巨变后的一段时间内的三轴加速度变化之和ACC_SUM、巨变前后的人体气压高度值H2-H1及巨变前后佩戴装置部位的身体一侧与另一侧压力差之和∑|Pi1-Pi2|。
由此,可以根据数据的剧烈波动,判断人体发生跌倒的时间,获取跌倒前后的数据进行比较,以确定人体是否发生跌倒。
在一些实施方式中,所述方法还可包括:信号采集模块实时采集装置佩戴信息数据输出至信号处理模块,所述信号处理模块根据装置佩戴信息数据进行分析处理,判断装置佩戴状态,输出装置佩戴状态标识;信号处理模块读取所述佩戴状态标识进行判断,当佩戴状态标识为正确佩戴时,进行人体跌倒检测,并输出第一信号至警报模块。由此,在检测到装置正确佩戴时,才进行人体跌倒检测,可以避免因装置没有佩戴或佩戴不正确或滑落时产生误报的问题,进一步提高检测的准确率。而且,只有在装置佩戴正确时,才进行用户行为信息数据的采集和人体跌倒的检测,能够减少不必要的数据处理操作,提高效率,节省功耗。
在一些实施方式中,所述信号采集模块还包括温度传感器和/或人体生物电传感器,所述装置佩戴信息数据包括温度数据、人体生物电信号、佩戴部位压力数据和三轴加速度数据的其中之一或者两者以上的组合。
在一些实施方式中,所述信号处理模块根据所述装置佩戴信息数据进行以下A至D分析处理的其中之一或两者以上的组合,以生成并输出装置佩戴状态标识:
A、读取温度传感器的贴近人体一侧的温度信号T1及设备暴露于空气中一侧的温度信号T2,在判断T1和T2的温度差大于设定阈值时,设置佩戴状态标识为正确佩戴,否则设置佩戴状态标识为佩戴有误;
B、读取人体生物电传感器输出的人体生物电信号,在判断人体生物电信号为高电平时,设置佩戴状态标识为正确佩戴,否则设置佩戴状态标识为佩戴有误;
C、根据录入信息获取用户腰围值L,根据矩阵式分布的压力传感器间距D计算产生压力的传感器的个数N=L/D,读取N个压力传感器的压力信号P1…PN,在判断N个压力传感器的压力信号都等于设定阈值时,设置佩戴状态标识为正确佩戴,否则设置佩戴状态标识为佩戴有误;
D、读取三轴加速度传感器的三个轴方向上的加速度值,在判断代表人体躯干方向的加速度值为g且其他两个加速度值为0时,设置佩戴状态标识为正确佩戴,否则设置佩戴状态标识为佩戴有误;
其中,在进行两者以上的组合分析处理时,任一方式下判断为佩戴有误时,即设置为佩戴有误标识。
由此,可以实现通过温度和/或人体生物电信号判断人体是否佩戴了装置,通过压力和加速度判断人体佩戴装置的位置和方向是否正确,从而实现对装置是否佩戴和佩戴是否正确的检测,避免因装置问题而误报。
在一些实施方式中,所述装置还包括定位模块和无线通讯模块,所述方法还包括:所述定位模块采集所述监护装置的位置信息,所述警报模块通过无线通讯模块发送警报信息至远程终端,所述警报信息包括从所述定位模块获取的位置信息和求救内容。由此,可以及时将位置信息和跌倒求救内容发送至监护人,以得到及时有效的救助。
在一些实施方式中,该方法还可包括:
当人体处于跌倒状态时,所述信号采集模块持续采集三轴加速度数据、气压高度数据及压力数据并存储;
信号处理模块根据实时更新的三轴加速度数据、气压高度数据及压力数据进行分析处理,判断人体解除跌倒的状态,当判断人体解除跌倒时,向警报模块发送第二信号,所述警报模块根据第二信号,通过无线通讯模块发送脱离跌倒的信息至远程终端。
由此,可以实现在跌倒后对用户状态的持续监测,以便在解除危险后,及时通知监护人,给监护人节约时间和减少监护人的紧张焦虑,更加人性化,用户体验更好。
在一些实施方式中,所述信号处理模块根据实时更新的三轴加速度数据、气压高度数据及压力数据进行分析处理,判断人体解除跌倒的状态包括:
计算发生跌倒后一段时间内的代表人体躯干方向的轴的加速度均值AY_3;
判断加速度均值AY_3、气压高度值H3及压力值P13,P23,…,PN3是否满足条件:|AY_3-g|<TH6、H3-H2>TH7且P13=P23=...=PN3,其中,TH6和TH7为设定的阈值,如满足条件,则判断人体解除跌倒状态。
由此,通过人体躯干方向的加速度均值是否接近于g,装置高度是否逐渐变大和佩戴部位压力数据是否变得均匀,而判断人体是否从跌倒状态站立起来,从而在人体解除跌倒时,第一时间通知监护人。
在一些实施方式中,该方法还可包括:接收通过按钮的信号输入,播放/暂停扬声器警报和发送求救信息/解除求救信息至远程终端。由此,可以实现在发生误报时,进行用户的主动处理,以减少误报带来的不良后果。
附图说明
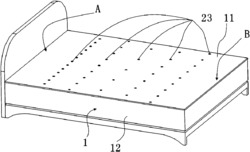
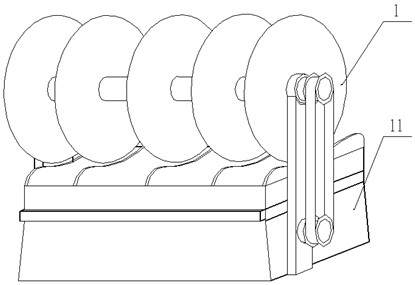
图1为本发明一实施方式的智能人体跌倒监护装置的外观结构示意图;
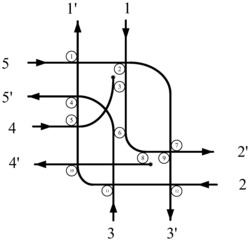
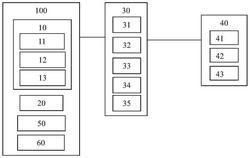
图2为本发明一实施方式的智能人体跌倒监护装置的模块框架结构示意图;
图3为本发明一实施方式的智能人体跌倒监护装置的处理方法的流程图;
图4为图3所示方法中人体跌倒检测的方法流程图;
图5为本发明另一实施方式的智能人体跌倒监护装置的处理方法的流程图;
图6为图5所示方法中装置是否正确佩戴的检测方法流程图;
图7为本发明另一实施方式的智能人体跌倒监护装置的处理方法流程图;
图8为图7所示方法中自动退出跌倒模式的方法流程图;
图9为人体发生跌倒时三轴加速度数据折线图。
具体实施方式
下面结合附图对本发明作进一步详细的说明。
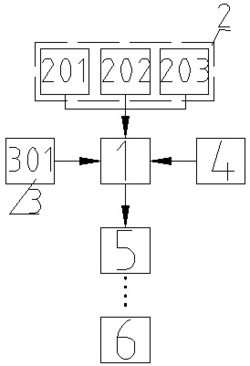
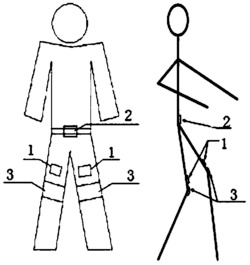
图1示意性地显示了根据本发明的一种实施方式的智能人体跌倒监护装置的外观结构。如图1所示,该装置包括带体1和带扣2,带体1和带扣2一端固定连接,另一端可在系腰带时扣紧,连接和扣紧方式同普通的腰带。带扣2上设置有按钮3,用户可以通过按下按钮3进行人机交互。监护装置的压力传感器5沿带体1均匀分布,而剩余的功能模块(如信号采集模块的其他传感器、信号处理模块、定位模块、无线通讯模块等)都内置于带扣2内的集成芯片4上。在实际应用中,用户通过佩戴图1所示的腰带就可以实现对使用者的日常监护。由于腰带属于大多数人的日常着装必须品,携带方便,无任何附带感,不易遗忘,非常便捷。
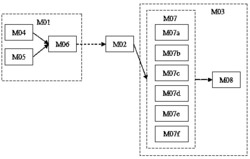
图2示意性地显示了本装置的内置于带体内的各模块的框架结构。如图2所示,该装置包括信号处理模块20、定位模块21、信号采集模块22、无线通讯模块23和警报模块24。定位模块21采用GPS或北斗或移动基站等定位方式实现,用于提供用户的地理位置信息。无线通讯模块23是GSM通讯单元或蓝牙通讯单元等可以通过无线方式与移动终端设备进行通讯的芯片或模块,用于实现与远程终端(如手机、电脑、IPad等设备终端)之间的数据交互。警报模块24设置为当接收到与跌倒相应的第一信号(如求救信号)时,通过无线通讯模块23发送相应的警报信息(如求救信息)至远程终端,以通知监护人用户发生跌倒需要救助,相应的求救信息可包括定位模块21获取的地理位置信息和特定的求救内容。信号采集模块22用于实时采集用户行为信息数据,提供给信号处理模块20进行人体跌倒检测分析。信号采集模块22主要通过多种传感器实现,包括但不限于三轴加速度传感器、气压传感器和压力传感器,三轴加速度传感器用于采集人体姿态数据,气压传感器用于采集气压高度数据,压力传感器用于采集压力数据。信号处理模块20是MCU等微型处理器。其中,信号处理模块20包括跌倒检测单元202,跌倒检测单元202用于根据信号采集模块22采集的人体姿态数据(包括三个轴向的加速度数据AX、AY、AZ)、气压高度数据和压力数据进行跌倒检测,当判断发生跌倒时,向警报模块24输出求救信号(即第一信号),以启动警报模块24将求救信息通过无线通讯模块23发送到监护人的远程终端设备。由于人体发生跌倒时,三轴加速度会在摔倒瞬间有短暂的“巨变”,随后有一段时间会相对“静止”,气压高度数据在跌倒前后会有一定的高度差,压力数据在人体贴近地面的一侧和背离地面的一侧会根据受力情况不同而一定的差值,跌倒检测单元202根据这三种数据就可以进行人体是否发生跌倒的检测和判断。
图9示意性地显示了一种典型情况的人体发生跌倒的三轴加速度数据折线图。第一区间90为人体正常站立时的加速度数据折线图,第二区间91为失重状态的加速度数据折线图,第三区间92为发生跌倒时的加速度数据折线图,第四区间93为跌倒后一段时间内的加速度数据折线图。如图9所示,在人体发生跌倒时,在撞击到地面时,三轴加速度信号会出现波动非常剧烈的一段数据,如图9中信号发生剧烈变化的第三区间92,即为人体碰撞地面的瞬间,本发明称之为“巨变”区间。分析跌倒发生后一段时间内的加速度数据,正常情况下,跌倒后会有一段相对静止的区间,如图9所示的静止区间(第四区间)93,在第四区间93内,代表人体躯干方向的Y轴的加速度基本接近于0(因为人体由直立变为了平躺姿态),本发明称之为“静止”区间。
在使用过程中,信号采集模块22实时采集用户行为数据(包括人体姿态数据、气压高度数据和佩戴部位压力数据),并通过FIFO(First In First Out,先进先出)形式存储一段时间(如4秒)内的人体姿态数据(即三轴加速度数据)、气压高度数据和压力数据。跌倒检测单元202根据存储的三轴加速度数据,分析是否出现波动非常剧烈的一段数据(即是否出现“巨变”),具体为:在发生“巨变”的区段设定阈值TH1,通过计算每次采集的三轴加速度数据AX、AY、AZ的向量模获取三轴加速度幅值ACC,即有 判断每次采集的三轴加速度数据的幅值ACC是否大于设定的阈值TH1,当三轴加速度幅值大于设定的阈值时,判断此次采集数据的时间点即为发生“巨变”的时间。根据发生“巨变”的时间点,读取发生“巨变”前的一段时间内(如1秒)存储的代表人体躯干方向的三轴加速度数据AY,根据采集的代表人体躯干方向的Y轴的加速度值AY,计算发生“巨变”前的Y轴的均值 (n为“巨变”前的一段时间内采集的加速度数据的编号)。同时,记录发生“巨变”前最后一次采集的气压高度数据H1和压力数据(P11,P21,……,PN1)。为了进一步确认人体是否在巨变时发生跌倒,可根据存储的采集数据记录发生“巨变”瞬间前后时段内(如巨变前0.1s-巨变后0.1s内)的加速度数据AX、AY、AZ,根据记录的加速度数据计算加速度变化量ACC_CHG,计算公式为: (n是在该瞬间时段内采集的加速度数据的编号)。设定阈值TH2如可以设置为2g,判断计算得到的“巨变”瞬间的加速度变化量ACC_CHG是否满足ACC_AHG>TH2,满足说明在这个瞬间时段人体发生跌倒,而在这个跌倒瞬间后人体将进入巨变后的静止时间段,则记录“静止区间”内(即巨变后0.1s之后的一段时间内)的三轴加速度数据AX、AY、AZ,气压高度值H2以及佩戴部位的压力值(P12,P22,……,PN2)。根据记录的数据计算该区间内的代表人体躯干方向的Y轴的加速度的均值 和该区间内的三轴加速度变化之和 n为静止区间内采集的加速度数据的编号。设定装置离地面的高度阈值TH3,静止状态加速度阈值TH4和压力差阈值TH5,判断巨变前的气压高度值H1和静止区间内的气压高度值H2的高度差是否满足大于设定的阈值TH3,即是否满足H2-H1>TH3,静止区间内的加速度变化之和ACC_SUM是否小于设定的阈值TH4,即是否满足ACC_SUM<TH4。同时判断装置佩戴部位一周的压力情况,是否存在一侧的压力传感器的压力值与另一侧的压力值的压力差之和大于设定的阈值TH5,即∑|Pi1-Pi2|>TH5。且判断巨变前的Y轴方向的加速度均值AY_1是否接近重力加速度g(说明用户是站立状态),静止区间Y轴方向的加速度均值AY_2是否接近0(用户是平躺状态)。其中,TH3可以根据人体信息数据设置为腰部到脚踝的高度如80cm,如果满足,则说明在巨变前和静止区间,人体的高度由直立变为弯曲或平躺状态;TH4是发生跌倒后的平静时期,这一时期加速度变化量非常小,可以设置为较小的值,如趋近于0.1g(g为重力加速度)。如果满足,则说明在人体高度由高变低之后的一段时间内,人体处于静止状态,而正常的跌倒发生后,在脱离跌倒姿态前都会出现该情形;TH5根据人体跌倒时着地一侧的压力值与远离地面一侧的压力值的差之和进行设置,如果满足则说明人体在身高发生变化且进入静止状态后,有一侧着地。由此,可以判断当三个条件同时满足,即为人体发生了跌倒,则将人体跌倒状态标志如FALL_DOWN_FLAG设置为TRUE,同时向警报模块24发送求救信号(如字符“1”),从而启动警报,进入求救模式。警报模块24根据定位模块21提供的地理位置信息,生成包含地理位置信息和求救内容的求救信息通过无线通讯模块23发送到监护人的远程终端,进行通知,以获取救助。该实施例提供的跌倒检测方式,需要同时检测气压高度数据的变化、加速度变化以及佩戴部位一周压力数据变化,能够比较全面的考虑用户的行为特征和数据,相对单一的加速度或角度变化的检测方式,本发明的检测准确率更高更有效,以便使用者在发生跌倒后能够第一时间发出求救请求,获得救助。
同时,考虑到除了算法方面的准确率外,装置佩戴情况也是影响检测准确率的一个重要因素,本发明同时提供了装置在没有佩戴情况下或佩戴不正确情形下导致误报的解决方案。如图2所示,信号处理模块20中还包括装置佩戴检测单元201。装置佩戴检测单元201设置为根据信号采集模块采集的装置佩戴信息数据(包括三轴加速度数据和佩戴部位一周的压力数据)进行分析处理,输出佩戴状态控制信号至跌倒检测单元202。跌倒检测单元202输出的佩戴状态控制信号进行跌倒检测,当在装置佩戴正确的情况下,采集用户行为数据进行分析检测,在发生跌倒时向警报模块24输出求救信号。
在使用时,用户启动装置后,信号采集模块21不间断地采集压力数据P1,P1,……,PN。装置佩戴检测单元201对比压力数据P1,P1,……,PN,如果人体没有佩戴或佩戴松紧不符合要求,比如太过于松动或佩戴部位不准确等,压力传感器的各数据就会有较大差值,如果正确佩戴,压力数据的值基本上应该满足P1=P2=……=PN=P,其中P为正确佩戴在腰部时的松紧度压力值。需要说明的是,压力传感器是矩阵式分布在腰带上的,个数为N=L/D,其中,L为用户的腰围信息(根据用户录入的基本信息获取),D是矩阵式分布的压力传感器的间距。如果信号采集模块21采集的压力数据满足P1=P2=……=PN=P,则可以判定用户佩戴的松紧度和佩戴位置正确,则将佩戴状态标识WARE_FLAG设置为TRUE,否则设置为FALSE。
优选地,用户启动装置后,信号采集模块21同时不断采集三轴加速度数据AX、AY、AZ。装置佩戴检测单元201可同时根据三轴加速度数据检测装置佩戴方位是否正确。由于,正常情况下人体直立时,正确的佩戴方式应该仅有一根轴(即人体躯干直立方向的轴)加速度值为g(即重力加速度),而其他两根轴加速度值为0。假设Y轴代表人体站立时候的躯干方向,则装置佩戴检测单元201判断采集的AX、AY、AZ是否满足AY=g且AX=AZ=0,如果满足,则判定用户佩戴方向正确,设置佩戴状态标识WARE_FLAG=TRUE,否则设置为FALSE。
优选地,信号采集模块21还包括温度传感器。其中,由于温度传感器本身具有方向性(朝向人体侧和朝向外侧),本实施例的温度传感器设置为两个,一个的方向设置为朝向人体的一侧,用于采集人体温度,另一个的方向设置为朝向空气的一侧,用于采集环境温度,两个温度传感器设置好方向后,集成于图1所示的集成芯片4上进行温度采集。装置启动后,信号采集模块21不断采集装置贴近人体一侧的温度数据T1和装置暴露于空气中一侧的温度数据T2,如果人体没有佩戴装置,则基本应满足T1=T2(允许有一定范围误差,如T1与T2的差接近于设定的阈值如0.5°),如果佩戴装置的情况下,两侧的温差即T1和T2应该有一定的幅值(如大于设定的阈值0.5°)。装置佩戴检测单元201根据采集的温度数据,比较T1和T2的温差值,即可判定装置是否佩戴。如果佩戴,则设定佩戴状态标识为TRUE,否则设置为FALSE。
优选地,信号采集模块21还可包括人体生物电传感器。装置启动后,信号采集模块21不断采集人体生物电传感器输出的人体生物电信号,根据人体生物电信号是否为高电平,判断人体是否佩戴了装置。如果人体生物电信号为高电平,则设置佩戴状态标识为TRUE,否则设置为FALSE。
在实际应用中,装置佩戴检测单元201可以只根据以上的压力数据、三轴加速度、温度数据和人体生物电信号的其中一项进行装置是否佩戴或是否正确佩戴的检测,也可以同时选择其中的任意两项以上的组合进行检测,选择的检测数据越多,检测的准确率越高。其中,在选择其中任意两项以上的组合进行检测时,只要其中任一方式的检测结果为佩戴有误,都要设置佩戴状态标识为FALSE。如,可以同时进行四项的组合进行检测,包括先通过温度数据检测装置是否佩戴,如果人体和外界环境温差很小时(如都为37度),则通过人体生物电信号检测装置是否佩戴,如果佩戴则对比压力数据判断佩戴位置是否正确,如果正确再根据三轴加速度判断佩戴方向是否正确。如果四者都正确,则判定为装置佩戴正确,设置佩戴状态标识为TRUE,否则设置为FALSE,并继续进行数据采集。跌倒检测单元202读取佩戴状态标识的值,当为TRUE时,通过信号采集模块21采集用户行为信息数据进行跌倒检测。
优选地,在进行佩戴检测时,还可以在初始化后或者检测到佩戴有误时,通过语音播放正确佩戴方法,指导用户进行佩戴。
如图2所示,本装置还可以包括人机交互模块25。人机交互模块25可以是触摸屏、语音识别模块或按钮,设置为接收用户输入,进行信息录入,或根据用户指令启动警报模块24进行求救报警或解除求救报警。如通过触摸屏录入用户基本信息,或通过按钮进行一键报警,也能够满足因采样率不足及算法识别率等问题影响检测结果时,用户能及时进行跌倒报警,非常快捷方便。
优选地,为了能够更加人性化地满足用户的需求,本发明还可进一步设置自动退出跌倒报警的功能,以满足用户在跌倒后休息一段时间自行爬起或其他方式站立起来等情况下,需要及时告知监护人和自动退出报警模式的需求。
如图2所示,信号处理模块20还包括跌倒后状态检测单元203,设置为在人体发生跌倒后,信号采集模块21持续采集三轴加速度数据(AX、AY、AZ)、气压高度数据(H)和佩戴部位压力数据(P1,P2,……,PN),并存储一段时间内(如4秒内)的加速度数据、高度数据和压力数据,分析代表人体躯干方向的Y轴均值 气压高度值H3以压力值(P13,P23,……,PN3)是否满足由跌倒转为站立的条件。具体为,设定阈值TH6、和TH7,判断是否满足|AY_3-g|<TH6、H3-H2>TH7且P13=P23=...=PN3,如果全部满足,则判定为使用者已经自行站立,设置跌倒状态标识为FALSE,并发送相应的第二信号(如解除求救信号)至警报模块24,警报模块24通过无线通讯模块23发送脱离跌倒状态的信息至远程终端,以提醒监护人使用者已经脱离跌倒状态。其中,TH6是代表人体躯干方向的加速度均值AY_3与站立状态下的加速度值g(即重力加速度)之间差值的阈值,可以设定为接近于0,AY_3越接近于重力加速度g(即|AY_3-g|<TH6时TH6越小),表明人体越接近于正常的站立状态;TH7是高度差阈值,表示当前状态下装置的高度与跌倒时装置的高度之间差值与站立状态时高度的接近程度,可以设置为80cm,也可以根据用户的身高信息进行设置,H3-H2>TH7表示当前装置高度H3比跌倒时的装置高度H2要高,说明人体已远离地面;而P13=P23=...=PN3表明装置佩戴部位的压力已经趋向于平衡,即没有承压较大的点,说明使用者已经不是处于一侧着地状态。由此,通过判断是否满足判定条件|AY_3-g|<TH6、H3-H2>TH7且P13=P23=...=PN3,即可判定用户是否已经自行站立,从而在用户脱离跌倒模式时能及时通知监护人,可以有效提升用户体验,非常便捷。同时,由于在报警阶段,装置需要不停使用无线通讯模块、人机交互模块和警报模块,装置的功耗会比较高,而自动检测到用户解除跌倒状态后退出警报,能够有效降低装置的功耗。
可选地,警报模块25还可以是扬声器播放装置,在启动求救模式时,在通过无线通讯模块23向监护人发送求救信息时,同时启动扬声器播放语音求救信号,以便及时得到救助;而在自动退出求救模式时,通过无线通讯模块23向监护人发送脱离跌倒状态信息和停止播放扬声器的语音求救信号。
本发明提供的智能人体跌倒监护装置能够佩戴于用户腰部,作为腰带使用,非常方便。而且,本发明的装置通过三轴加速度数据、气压高度数据和压力数据进行人体跌倒检测,更符合用户的行为特征,正确率更高。同时,本发明的装置提供了装置佩戴检测功能,能够避免因装置没有佩戴或佩戴不正确时误报的不良,进一步提高了跌倒检测的正确率,以及时准确的将使用者的跌倒求救信息和位置信息发送给监护人。本发明的装置同时还可提供跌倒后的自动检测,能够在用户跌倒后继续检测用户行为状态,当用户站立后,及时将跌倒解除的信息发送给监护人,给监护人带来了便利(如节省监护人的时间、减少监护人的精神紧张压力等)。本发明的装置还能够通过触摸屏、按钮、语音识别等实现与用户的信息交互,方便用户操作,可以在发生危急情况或出现误报时,通过按钮满足用户求救的需求。
图3示意性地显示了本发明一实施方式的智能人体跌倒监护装置的处理方法(工作方法)。如图3所示,该方法包括:
步骤S301:信号采集模块采集用户行为信息数据。
信号采集模块通过三轴加速度传感器采集用户人体姿态数据(包括三轴加速度值AX、AY、AZ),通过环境气压传感器采集用户气压高度数据(H),通过压力传感器采集用户佩戴部位一周的压力数据(P1,P2,......,PN)。用户姿态数据可以用于判断用户的站立或平躺状态,气压高度数据可以用于判断装置离地面的高度,佩戴部位一周的压力数据可以用于判断用户着地时着地侧和未着地侧的压力情况。
步骤S302:信号处理模块根据采集的用户行为信息数据检测人体是否发生跌倒。
信号处理模块根据采集到的用户行为信息数据进行分析,判断人体是否发生跌倒,当检测到人体发生跌倒时,进行步骤S303,如果没有检测到人体发生跌倒,则继续进行步骤S301的数据采集。图4示意性地显示了人体跌倒检测的方法流程。如图4所示,该方法包括:
步骤S401:实时采集人体姿态行为数据、气压高度数据及压力数据。
信号采集模块实时进行数据采集,主要采集人体姿态实时数据(即三轴加速度数据AX,AY,AZ)、环境气压高度(H)数据以及佩戴部位压力数据(P1,P2,…,PN)。并采用FIFO(First In First Out,先进先出)模式存储一段时间内的数据,如4秒内的加速度数据、气压高度数据和压力数据。
步骤S402:判断是否发生数据的“巨变”。
信号处理模块根据三轴加速数据,分析是否出现“巨变”的数据,因为当人体发生跌倒时,在撞击到地面时,三轴加速度信号会出现波动非常剧烈的一段数据(具体可参见前文图9的叙述),在此设定阈值TH1,根据三轴加速度数据AX,AY,AZ三者的向量模计算获取三轴加速度幅值ACC(计算公式参见前文叙述),判断是否存在ACC>TH1,如果满足条件,则说明此时发生“巨变”,则进行步骤S403,如果不满足条件,则继续进行步骤S401。
步骤S403:记录变化前的高度值(H1)、Y轴加速度均值(AY_1)以及压力值(P11,P21,......,PN1)。
根据信号采集模块各个传感器采集的数据,记录下发生“巨变”前的代表人体躯干方向的Y轴均值数据AY_1(计算公式参见前文叙述),气压高度数据H1,压力数据(P11,P21,……,PN1)。
步骤S404:计算“巨变”瞬间的加速度变化值ACC_CHG。
根据信号采集模块各个传感器采集的数据,记录发生“巨变”瞬间前后时段(如前0.1s-后0.1s)内的加速度数据变化量ACC_CHG(计算公式参见前文叙述)。
步骤S405:判断加速度变化值ACC_CHG是否大于设定阈值TH2。
因为正常跌倒的触地瞬间非常短暂,同时触地时的总变化量会非常大,设定阈值TH2,判断是否满足条件ACC_CHG>TH2,如果满足则说明人体此时已经触地跌倒,在跌倒之后人体正常会进入静止区间,则进行步骤S406,否则进行步骤S401持续进行数据采集。
步骤S406:记录变化后的高度值(H2)、Y轴加速度均值(AY_2)、压力值(P12,P22,......,PN2)以及“平静”区间段的加速度变化总和ACC_SUM。
根据前文对图9的折线图的叙述,分析跌倒发生后一段时间内的三轴加速度,检测出跌倒后的静止区间(该区间内代表人体躯干方向的Y轴基本接近于0,可通过该区间内Y轴的加速度是否趋近于0进行判断。),计算该区间内三轴加速度变化之和ACC_SUM(计算公式参见前文叙述),同时记录该时间段的人体气压高度值H2,以及佩戴装置部位的压力值(P12,P22,……,PN2)。
步骤S407:是否满足跌倒判定条件。
设定阈值TH3、TH4、TH5(取值详见前文叙述),判断巨变前的气压高度值H1和静止区间内的气压高度值H2的高度差是否满足大于设定的阈值TH3,即是否满足H2-H1>TH3,静止区间内的加速度变化之和ACC_SUM(计算公式参见前文叙述)是否小于设定的阈值TH4,即是否满足ACC_SUM<TH4,同时判断装置佩戴部位一周的压力情况,是否存在一侧的压力传感器的压力值大于设定的阈值TH5,即∑|Pi1-Pi2|>TH5。且判断巨变前的Y轴加速度均值AY_1是否接近重力加速度g,静止区间的Y轴加速度均值是否接近0,如果同时满足H2-H1>TH3、ACC_SUM<TH4和∑|Pi1-Pi2|>TH5,且AY_1接近g,AY_2接近0,则进行步骤S408,否则进行步骤S401。
步骤S408:判断发生跌倒,设置跌倒状态标识为TRUE,进入跌倒求救状态。
如果同时满足以上条件,则判断人体已经发生了跌倒(具体见前文叙述),则设置跌倒状态标识FALL_DOWN_FLAG=TRUE,同时向警报模块发送第一信号如求救信号,以进入跌倒求救状态。
通过以上步骤,即可通过三轴加速度判断人体的站立和平躺的方向变化,通过气压高度数据判断装置离地面的高度变化,通过压力数据判断人体佩戴部位(本发明为腰部)一周的受压情况变化,从而检测出人体是否发生跌倒,符合人体行为特征,检测的准确率更高。
步骤S303:信号处理模块向警报模块发送求救信号,并通过定位模块获取用户位置信息。
信号处理模块向警报模块发送求救信号(如字符“1”),同时通过定位模块获取用户的地理位置信息。
步骤S304:警报模块进行求救响应处理。
警报模块接收到求救信号后,通过无线通讯模块将用户的地理位置信息和求救内容发送到监护的远程终端设备,通知监护人,以得到及时的救助。
图5示意性地显示了本发明另一实施方式的智能人体跌倒监护装置的处理方法。如图5所示,该实施方式与图3所示实施方式的不同在于,本实施例需要首先检测装置是否佩戴正确,如果佩戴正确才进行人体是否发生跌倒的检测。具体如下:
步骤S501:信号采集模块采集装置佩戴信息数据。
信号采集模块可以是三轴加速度传感器、压力传感器、温度传感器和人体生物电传感器的其中之一或者两项以上的组合,可以通过三轴加速度传感器采集三轴加速度数据AX、AY、AZ,通过压力传感器采集佩戴部位一周的压力数据P1,P2,......,PN,通过温度传感器采集贴近人体一侧的温度数据T1和暴露于空气一侧的温度数据T2,通过人体生物电传感器采集人体生物电信号。信号采集模块采集装置佩戴信息数据,可以是以上传感器数据中的一个,也可以是多种的组合,本实施例优选三者组合的方案,进行详细阐述。该组合方式可以提高检测的正确率。
步骤S502:信号处理模块根据采集的装置佩戴信息数据检测装置是否正确佩戴。
信号处理模块根据采集的数据,检测装置是否正确佩戴。图6示意性地显示了装置是否正确佩戴的检测方法,如图6所示,该方法包括:
步骤S601:开启设备并初始化。
用户开启装置的电源,等待装置自动进行数据的初始化,将装置的状态变量赋予初值,如将佩戴状态标识WARE_FLAG初始化为FALSE、将跌倒状态标识FALL_DOWN_FLAG赋值为FALSE等。
步骤S602:实时采集温度、压力及加速度数据,并向用户进行语音指导佩戴。
信号采集模块实时采集三轴加速度数据AX、AY、AZ,佩戴部位一周的压力数据P1,P2,......,PN,贴近人体一侧的温度数据T1和暴露于空气一侧的温度数据T2,同时通过语音播放佩戴方法对用户进行佩戴指导。
步骤S603:判断人体一侧温度T1与空气一侧温度T2相比,是否T1-T2>TH。
如果人体没有佩戴设备,则理论上T1=T2,实际中有0.5°左右的误差,如果人体佩戴,则一侧是空气温度、一侧是人体温度就会导致两侧出现温度差,这样就达到了检测设备是否佩戴的目的。基于存在温差的事实,设定阈值TH,对比T1和T2是否满足温度差大于设定的阈值,如果大于则进行步骤S604,否则持续进行步骤S602的数据采集。
需要说明的是,由于存在外界温度与人体温度接近的情况,作为优选实施例,可以在信号采集模块中增加人体生物电传感器,进行进一步检测,具体为采集人体生物电信号,判断是否为高电平,如果人体生物电传感器输出的为高电平,则说明人体佩戴了装置,可进行步骤S604的压力检测,否则持续进行数据采集。在实际应用中,人体生物电传感器也可以作为温度传感器判断装置是否佩戴的替代方案,即将温度传感器替换为人体生物电传感器,进行人体生物电信号的判断,本发明对组合方式不做限制。
步骤S604:判断各压力传感器的值是否满足P1=P2=......=PN>0。
如果人体正确佩戴,则人体腰部一周的压力值满足相等且等于松紧度适中时的压力值P,即有P1=P2=......=PN=P>0,判断是否满足该条件即可判断出装置是否佩戴部位正确且松紧度合适(具体可参见前文叙述)。如果满足,则进行步骤S605,否则持续进行步骤S602的数据采集。
步骤S605:判断正常站立情形下三轴加速度值是否满足AY=g且AX=AZ=0。
正常情况下,人体站立时,正确的佩戴方式应该仅有一根轴加速度值为g(重力及速度)其他两根轴应为0,设Y轴代表人体站立时候躯干方向,即AY=g且AX=AZ=0,如果满足则说明装置的佩戴方向正确,则进行步骤S607,否则进行步骤S606。
步骤S606:通过语音提示用户佩戴方向错误。
播放语音提示,提醒用户佩戴方向错误,并继续进行步骤S602的数据采集。
步骤S607:判断佩戴正确,设置佩戴正确状态标识为TRUE,进入跌倒检测状态。
如果同时满足温度、压力和三轴加速度的判定条件,则说明装置已经佩戴,且佩戴部位和方向都正确,此时将佩戴正确状态标识WARE_FLAG设置为TRUE,之后进行步骤S503的跌倒检测的数据采集和判断人体是否发生跌倒,否则不进行跌倒检测。由此,可以避免因装置没有佩戴或佩戴不正确时的误报,提高跌倒检测和求救警报的准确率。
步骤S503:信号采集模块采集用户行为信息数据。
步骤S504:语音播放佩戴方法。
步骤S505:信号处理模块根据采集的用户行为信息数据检测人体是否发生跌倒。
步骤S506:信号处理模块向警报模块发送求救信号,并通过定位模块获取用户位置信息。
步骤S507:警报模块进行求救响应处理。
步骤S503至步骤S507的实现可参照前文骤S301至步骤S304。通过该实施例,即可实现在判断佩戴正确的前提下,再进行跌倒检测,能够提高检测的效率和准确率。
图7示意性地显示了本发明另一实施方式的智能人体跌倒监护装置的处理方法。如图7所示,该实施方式与图5所示实施方式的不同在于,本实施例在检测到人体发生跌倒并进入求救模式后,会继续采集用户行为数据,进行跌倒后人体是否解除跌倒状态的检测,并在检测到人体解除跌倒状态时,自动退出跌倒求救模式,为用户和监护人提供方便。具体包括:
步骤S701:信号采集模块采集装置佩戴信息数据。
步骤S702:信号处理模块根据采集的装置佩戴信息数据检测装置是否正确佩戴。
步骤S703:信号采集模块采集用户行为信息数据。
步骤S704:语音播放佩戴方法。
步骤S705:信号处理模块根据采集的用户行为信息数据检测人体是否发生跌倒。
步骤S706:信号处理模块向警报模块发送求救信号,并通过定位模块获取用户位置信息。
步骤S707:警报模块进行求救响应处理。
步骤S708:信号采集模块持续采集用户行为信息数据。
步骤S709:信号处理模块根据采集的用户行为信息数据检测人体是否解除跌倒状态。
其中,步骤S701至步骤S707同步骤S501至步骤S507。不同在于,当进行跌倒警报后,需要继续进行步骤S708的数据采集,采集的数据包括三轴加速度数据、气压高度数据和佩戴部位的压力数据,并需要对采集的数据进行步骤S709的解除跌倒检测,以便在使用者休息后自动或依靠别人帮助站立后,能够及时通知监护人使用者已经解除跌倒状态,从而减少监护人的紧张焦虑,节约监护人的时间,以提供更智能更好的用户服务。
图8示意性地显示了信号处理模块根据采集的用户行为信息数据检测人体是否解除跌倒状态的方法。如图8所示,该方法包括:
步骤S801:判断跌倒状态标识是否为TRUE。
读取跌倒状态标识FALL_DOWN_FLAG的值,判断是否为TRUE,如果是TRUE则说明已经发生跌倒,则进行步骤S802持续进行数据采集,否则说明使用者并没有跌倒,进行步骤S803。
步骤S802:实时采集人体姿态行为数据、气压高度数据及压力数据。
信号采集模块持续采集三轴加速度数据(AX,AY,AZ),气压高度传感器持续采集高度数据(H),压力传感器实时采集压力数据(P1,P2,……,PN),并采用FIFO形式存储一段时间如4秒内采集的数据。
步骤S803:退出检测。
步骤S804:记录跌倒后的高度值(H3)、Y轴加速度均值(AY_3)以及压力值(P13,P23,......,PN3)。
信号处理模块根据存储的三轴加速度数据,计算得到该时间段内的Y轴加速度均值AY_3(计算公式参见前文叙述),并记录实时采集的气压高度数据H3,和压力数据(P13,P23,......,PN3)。
步骤S805:判断是否满足解除跌倒状态的判定条件。
设定阈值TH6和TH7,判断是否满足条件|AY_3-g|<TH6、H3-H2>TH7、P13=P23=...=PN3,如果满足|AY_3-g|<TH6说明人体躯干已经垂直于地面,即站立。满足H3-H2>TH7则说明当前设备高度比跌倒时高。满足P13=P23=...=PN3则可判断设备当前压力状态与跌倒前压力状态对比已变得均匀,不再是一侧受力大的着地情形。其中,阈值TH6,TH7的取值具体参见前文叙述。如果满足判定条件,则进行步骤S806,否则进行步骤S802继续采集数据。
步骤S806:判断已从跌倒模式解除,设置跌倒状态标识为FALSE,输出解除跌倒求救信号。
如果满足判定条件,则可判定使用者已从跌倒状态站立,此时设置跌倒状态标识为FALSE,并向警报模块发送解除跌倒信号(如字符“0”),以停止求救的警报。
步骤S710:信号处理模块向警报模块发送解除跌倒信号,警报模块进行解除求救的响应处理。
警报模块根据接收到的解除跌倒信号,通过无线通讯模块向监护人发送已解除跌倒、停止求救的信息,同时,警报模块也可以通过关闭扬声器,停止进行语音求救。
优选地,为了避免当检测错误时,发生误报,更好的保障使用者的人身安全,本发明的监护装置中的操作方法还可以包括:通过按钮接收用户的信号输入,播放/暂停扬声器警报和发送求救/解除求救信息至远程终端。如在装置上设置一个按钮,如果用户短暂按一下,则信号处理模块接收到用户的输入,向警报模块发送求救信号,警报模块播放扬声器和向监护人发送包含位置信息的求救信息给远程终端。如果用户长按按键,则信号处理模块接收用户输入,向警报模块发送解除求救信号,警报模块则停止播放扬声器的语音求救和向监护人发送已经解除危险的信息。
通过本发明的方法,实现了通过三轴加速度传感器、气压传感器和压力传感器进行人体行为信息数据的采集和但通过人体行为信息数据对人体跌倒状态的检测监护,准确率更高,满足对老人和病人的跌倒监护需求。同时,本发明的方法还提供了装置佩戴正确与否和自动退出跌倒模式的检测,能够避免因装置佩戴问题而带来的误报,也能够在判断跌倒后继续检测使用者的情况,达到站立时的及时通知处理,更加智能方便,检测的准确率更高。
以上所述的仅是本发明的一些实施方式。对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
智能跌倒监护装置及其处理方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0