

IPC分类号 : B61C3/00,B61D37/00,B61C17/00,B61L27/00,E01B21/00,E01B21/02,E01B21/04






专利摘要
一种无人驾驶高架宽体电车,设置室内外摄像机,收集交通指挥信息及乘客图像信息,设置车载计算机,综合分析、比较、识别、处理各种信息,准确控制无人驾驶高架宽体电车的开门、关门、语音报站、起步、加速、减速和停车的一系列动作,设置供电导轨,前、后滑轮压在衔接双轨下面,通过前、后连接板拉住高架宽体电车与供电导轨牢固连接,依靠无数个地桩支撑和稳定高架宽体电车的平衡,设置宽体乘客车厢和窄体高架车厢,占用很窄路面,利用上层空间增大车厢容量,不影响下面的车辆通行,允许多辆同类电车在同一条供电导轨同方向的公交路线首末端的直行车道上循环行驶,自身无需携带任何能源,在行驶中接受供电轨道提供的电网电源,实现真正的节能环保。
说明书
技术领域
本发明涉及一种无人驾驶公交车,确切的说,是一种无人驾驶高架宽体电车。
背景技术
目前世界各国都在积极研发无人驾驶公交车,我国的无人驾驶公交车在复杂环境识别、智能行为决策和控制等方面实现了新的技术突破,已经达到世界先进水平,但是对于更为复杂的城市环境,无人驾驶公交车仍然面临行驶过程中的交通拥堵问题、视觉导航的可靠性问题、多车调度和协调问题、与其它交通参与者的交互问题、成本问题,以及节能环保问题,使无人驾驶公交车大范围应用仍然存在一定困难。
发明内容
为了解决现有无人驾驶公交车面临的一系列问题,为了更加节能环保,本发明公开一种无人驾驶高架宽体电车。
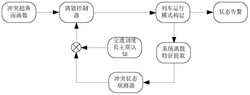
所述无人驾驶高架宽体电车的技术方案由高架宽体电车和供电导轨组成,其结构特点在于:所述高架宽体电车设置宽体乘客车厢和窄体高架车厢,宽体乘客车厢在窄体高架车厢上面,宽体乘客车厢与窄体高架车厢前后端对齐,窄体高架车厢上面左右端位于宽体乘客车厢下面左右端的中间位置,宽体乘客车厢的宽度大于大客车宽度,窄体高架车厢的宽度小于一般小汽车的宽度,从地面到窄体高架车厢上端的高度大于一般小汽车的高度,窄体高架车厢中间左右边设置左车门和右车门,左车门和右车门均为电脑控制的自动进出口门,窄体高架车厢内设置前楼梯和后楼梯,宽体乘客车厢底部前方设置乘客入口,乘客入口上端设置前护栏,宽体乘客车厢底部后方设置乘客出口,乘客出口上端设置后护栏,宽体乘客车厢顶部前端设置室外控制台,室外控制台上设置前视摄像机、左视摄像机和右视摄像机,宽体乘客车厢内部设置室内摄像机和语音播放器,宽体乘客车厢前端设置控制台,控制台内设置车载计算机,宽体乘客车厢前面设置投币箱,投币箱上端设置刷卡机,窄体高架车厢的前灯左、右端设置前左、右激光雷达,后灯左、右端设置后左、右激光雷达,所述车载计算机根据前视摄像机前方拍摄的图像信息,识别红绿灯标志,车载计算根据左、右视摄像机拍摄的左、右路旁图像信息,识别中途站台的标志,根据前后左右的激光雷达探测到周围障碍物的距离信息和室内外摄像机拍摄的乘客图像信息,车载计算机综合分析、比较、识别、处理各种信息、准确控制无人驾驶高架宽体电车的开门、关门、语音报站提示、起步、加速、减速和停车的一系列动作,车载计算机设置宽带通信发射、接收模块,通过发射和接收天线,公交调度监控室不仅能实时监控车辆现场,而且可以实时遥控无人驾驶高架宽体电车,指挥人员根据无人驾驶高架宽体电车的运行状况实时监控,可以对无人驾驶高架宽体电车进行人工操作;所述窄体高架车厢下端设置底盘框架,底盘框架前方左右端设置轴承架,轴承架内安装前左轴承和前右轴承,前左轴承和前右轴承内安装前轮轴,前轮轴左右端紧配安装左前轮和右前轮,前轮轴中间紧配安装前导向轮,前导向轮圆周制有前齿轮圈,所述底盘框架前上方左右端设置前电机轴,前电机轴右侧设置前驱电机,前驱电机左边设置前驱齿轮,前驱齿轮与前齿轮圈啮合,前驱电机同时驱动前导向轮、左前轮和右前轮,底盘框架后方左右端设置轴承架,轴承架内安装后左轴承和后右轴承,后左轴承和后右轴承内安装后轮轴,后轮轴左右端紧配安装左后轮和右后轮,后轮轴中间紧配安装后导向轮,后导向轮圆周制有后齿轮圈,所述底盘框架后上方左右端设置后电机轴,后电机轴右侧设置后驱电机,后驱电机左边设置后驱齿轮,后驱齿轮与后齿轮圈啮合,后驱齿轮同时驱动后导向轮、左后轮和右后轮,底盘框架设置前横梁,前横梁中间焊接前连接板,前连接板下方制有前轮孔,前轮孔左右端设置左一轮架和右一轮架,左一、右一轮架前后端设置前螺丝螺帽,4个前螺丝螺帽将左一、右一轮架紧固在前连接板下方左右端,左一、右一轮架设置前滑轮轴,前滑轮轴中间安装前滑轮,前滑轮小于前轮孔,与前轮孔同心;底盘框架设置后横梁,后横梁中间焊接后连接板,后连接板下方制有后轮孔,后轮孔左右端设置左二轮架和右二轮架,左二、右二轮架前后端设置后螺丝螺帽,4个后螺丝螺帽将左二、右二轮架紧固在后连接板下方左右端,左二、右二轮架设置后滑轮轴,后滑轮轴中间安装后滑轮,后滑轮小于后轮孔,与后轮孔同心,后连接板下端设置受电杆,所述受电杆为塑料制品,受电杆中部制有连接槽,后连接板下端位于连接槽内,连接槽中间设置连接轴,连接轴将受电杆与后连接板连接后受电杆能上下翘动,受电杆后端制有方孔,方孔内安装炭刷,炭刷内设置螺孔和螺帽,受电杆右后端设置炭刷螺丝钉,炭刷螺丝钉将炭刷与受电杆紧固,炭刷螺丝钉压紧一个焊片,焊片上焊接炭刷引线,后连接板前端焊接J形扁管,炭刷引线从J形扁管内引进窄体车厢,J形扁管前端焊接拉簧支架,受电杆前端制有拉簧孔,拉簧支架与拉簧孔之间安装拉簧,所述左前轮、右前轮、左后轮和右后轮是4个规格一致的铸铁车轮,所述前导向轮和后导向轮是2个规格一致的铸铁导向轮;所述供电导轨设置在城区某一路直行的公交路线上,城区双向道路中间设置隔离栏,隔离栏两侧是两个往返的单向道路,单向道路分为左转车道、直行车道和右转车道,供电导轨设置在直行车道中间,公交路线的首末端设置首端大转弯圆形车道和末端大转弯圆形车道,首、末端圆形车道与双向道路的两个直行车道首末端连接成封闭循环车道,供电导轨设置在循环车道中间。
所述供电导轨设置供电槽,所述供电槽是在循环车道中间开挖壕沟,壕沟底部中线设置无数地桩,每个地桩前后距离均为7米,地桩上面设置供电槽,供电槽上端制有左连接边和右连接边,左、右连接边和供电槽以及无数地桩用钢筋混凝土整体浇制,形成长距离封闭循环的供电槽,供电槽的总长度约等于公交路线首末端长度的2倍,供电槽底部中线设置无数个绝缘柱,绝缘柱选用高压线瓷瓶,每个绝缘柱之间的前后距离均为7米,绝缘柱下端均设置下连接板,下连接板由左、右螺丝钉紧固在供电槽底部,绝缘柱上端均设置上连接板,上连接板设置前、后螺丝孔和前、后螺丝钉,上连接板右上端设置L型铜排,L型铜排长度为7米,L型铜排前、后端制有连接孔,由前、后螺丝钉将前端的L型铜排与后端的L型铜排固定在上连接板的前、后端,前端的L型铜排与后端的L型铜排之间的连接处靠紧,对齐成一条直线后紧固,由无数个绝缘柱和上连接板将无数根L型铜排连接成长距离火线电轨,所述长距离火线电轨的首端或者末端连接交流220V电源的火线,长距离火线电轨经过绝缘柱对地绝缘,有效防止路面雨水造成漏电,供电槽底部设置抽水装置,如遇雨天及时排水,以满足供电槽内的电绝缘条件,所述供电轨道在供电槽左连接边上面设置左双连轨道,供电槽右连接边上面设置右双连轨道,左、右双连轨道的长度为7米,左、右双连轨道位于供电槽左、右连接边上面的图形是左右对称的,左双连轨道前后端均设置2个左螺丝螺帽,左连接边设置与前、后2个左螺丝螺帽对应的4个左安装孔,由4个左螺丝螺帽将左双连轨道固定在左连接边上面,无数左双连轨道按前后顺序排列在左连接边上面,以同样的固定方式安装;右双连轨道前后端设置2个右螺丝螺帽、右连接边设置与前、后2个右螺丝螺帽对应的4个右安装孔,由4个右螺丝螺帽将右双连轨道固定在右连接边上面,无数右双连轨道按前后顺序排列在右连接边上面,以同样的固定方式安装,左双连轨道的前后端均制有2个左连接耳、前端的左双连轨道与后端的左双连轨道之间的连接处靠紧,对齐成一条直线后由2个左对接螺丝紧固,无数左双连轨道的前后端相连,连接成长距离左双连轨道,右双连轨道的前后端均制有2个右连接耳,前端的右双连轨道与后端的右双连轨道之间的连接处靠紧,对齐成一条直线后由2个右螺丝螺帽紧固,无数右双连轨道的前后端相连,连接成长距离右双连轨道,所述长距离左、右双连轨道的首端或者末端连接交流220V电源的地线,长距离左、右双连轨道之间形成4个平行的轨道,位于4个轨道中间的两个轨道截面是L形,是左窄轨道和右窄轨道左、右窄轨道之间形成一个平行的导向槽,导向槽的宽度为3厘米,左、右窄轨道的上端面为导向双轨,左、右窄轨道的下端面为衔接双轨,位于4个轨道两边的两个轨道截面是工字形,是左工字形轨道和右工字形轨道,左、右工字形轨道之间的距离小于1米,左、右工字形轨道为载重双轨,所述供电轨道整体完成后,所述壕沟内填土掩埋供电槽,供电槽左右边修成柏油路,所述左工字形轨道与左窄轨道之间的槽口内修成左边带柏油路面,所述右工字形轨道与右窄轨道之间的槽口内修成右边带柏油路面,所述左边带柏油路面、右边带柏油路面与柏油路平面的高度一致,所述左、右窄轨道和左、右工字形轨道上端面均高于柏油路平面3毫米,所述前齿轮圈和后齿轮圈均位于导向槽内,前导向轮和后导向轮的左右端均滚动在导向双轨上面,无论供电导轨向左或者向右转弯,前导向轮和后导向轮跟随导向双轨左右导向,引导高架宽体电车左右转弯,左前轮、右前轮、左后轮和右后轮始终滚动在所述载重双轨上面,所述前连接板和后连接板规格一致,由1厘米厚的钢板制造成型,均位于导向槽内中间,前连接板和后连接板上安装的前滑轮和后滑轮是2个规格一致的铸铁滑轮,前、后滑轮左右端中心均设置左轴承和右轴承,前、后滑轮圆周均制有导向圈,前、后滑轮的导向圈均位于导向槽内,前滑轮和后滑轮的左右端均滚动在所述衔接双轨下面,无论供电导轨向左或者向右转弯,前滑轮和后滑轮跟随衔接双轨左右导向,使所述受电杆的炭刷下端始终滑动动在所述火线电轨上面,所述拉簧使炭刷接触火线电轨始终保持一定的压力。
所述前驱电机和后驱电机是同样型号的无刷无齿外转子永磁电机,前驱电机和后驱电机分别设置对应的前控制器和后控制器,窄体车厢内设置整流器,由炭刷引进窄体车厢的交流220V的电源火线连接整流器输入端,供电导轨经过前、后车轮将交流220V的电源地线连接到底盘框架,底盘框架设置接铁线连接整流器输入端,整流器输出220V的直流电源到前控制器和后控制器,前控制器输出端连接到前驱电机,后控制器输出端连接到后驱电机,前、后控制器的输入端连接到车载计算机,车载计算机控制前、后车轮和前、后导向轮共计六个车轮都具有相同的驱动力和制动力,都属于电力驱动和电力制动,增强了无人驾驶高架宽体电车的驱动力和制动力,所述无人驾驶高架宽体电车没有方向盘,没有脚踏油门和脚踏制动,全部是车载计算机控制电车的起步、加速和制动,前、后导向轮在导向双轨的导向槽内产生转弯力度,实现无人驾驶高架宽体电车的自动转向。
所述无人驾驶高架宽体电车的有益效果在于:所述供电导轨设置在城市道路的直行车道上,供电导轨没有改变机动车道的基本属性,属于铁路、公路两用的机动车道,供电导轨的左、右窄轨道和左、右工字形轨道上端面仅仅高于柏油路平面3毫米,与柏油路基本面相差无几,左、右工字形轨道之间的距离小于1米,所述导向槽的宽度仅有3厘米,因此供电导轨不影响路面行人和车辆通行,无人驾驶高架宽体电车的中途公交站台设置在人行横道的斑马线上,窄体高架车厢的左、右车门都可使用,方便左右人行道的乘客经过左、右车门和前、后楼梯上下高架宽体电车,高架宽体电车左右平衡时,重心在左右车轮之间,高架宽体电车左右不平衡时,重心在左右车轮之外,所述前、后滑轮压在所述衔接双轨下面,通过所述前、后连接板拉住高架宽体电车,使供电导轨与高架宽体电车牢固连接,所述供电导轨依靠无数个地桩支撑高架宽体电车在左右重心不平衡时的重力,充分利用地下基础稳定高架宽体电车的平衡;所述无人驾驶高架宽体电车在固定的轨道上行驶,属于一个槽口的轨道交通模式,不需要导航,因此不存在视觉导航的可靠性问题,所述高架宽体电车上面是宽体乘客车厢,下面是窄体高架车厢,高架宽体电车在城区双向道路中间行驶,宽体乘客车厢在两辆高架宽体电车双向道路相遇时不会接触,高架宽体电车遇到所有十字路口都是直行不转弯,允许多辆高架宽体电车在同一条公交路线上共用同一条供电导轨,在同方向的公交路线首末端循环行驶,解决了公交路线多车调度和协调问题,高架宽体电车始终沿着直行车道行驶,中途不变道,与其它交通参与者共享一个车道的路权,不影响其他车道的车辆通行,不与红绿灯指挥规则发生矛盾,解决了与其它交通参与者的交互问题,所述窄体高架车厢仅占用很窄的路面,宽体乘客车厢利用上层空间增大车厢容量,不影响宽体乘客车厢下面的车辆通行,实现顺畅的立体交通,缓解了交通拥堵问题,无人驾驶高架宽体电车自身无需携带任何能源,在行驶中接受供电轨道提供的电网电源,实现真正的节能环保,所述无人驾驶高架宽体电车与轨道交通的地铁和轻轨相比成本最低。
附图说明
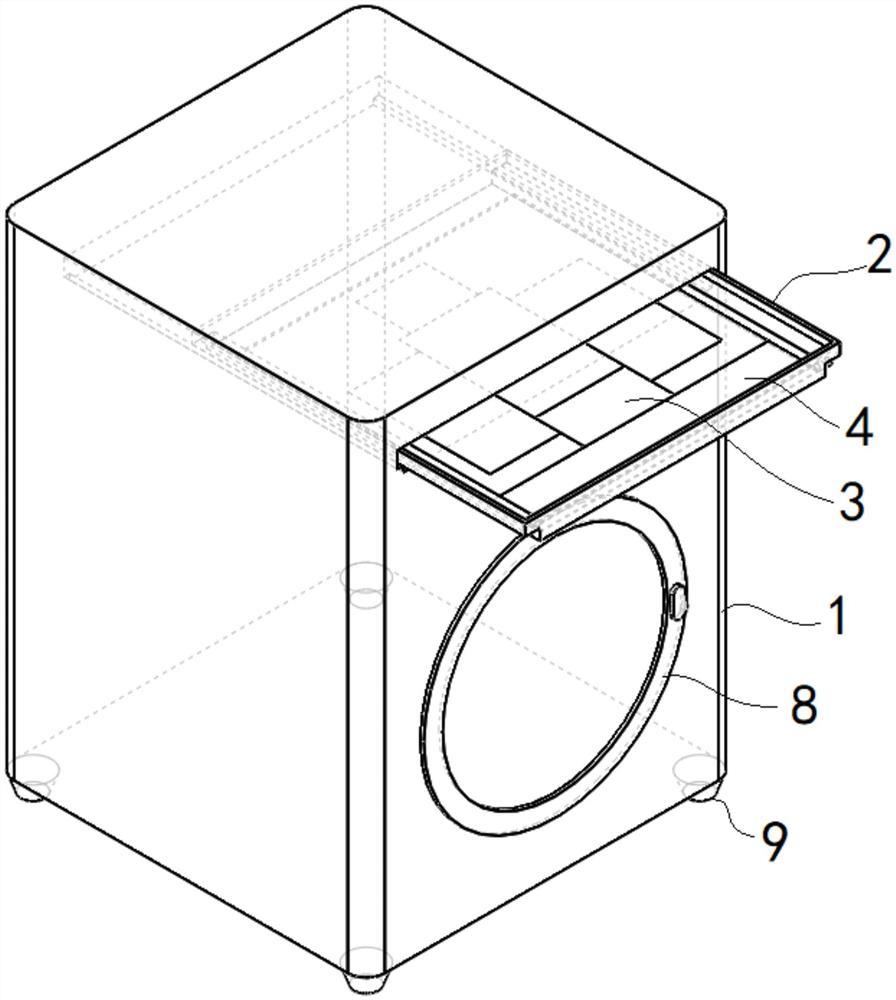
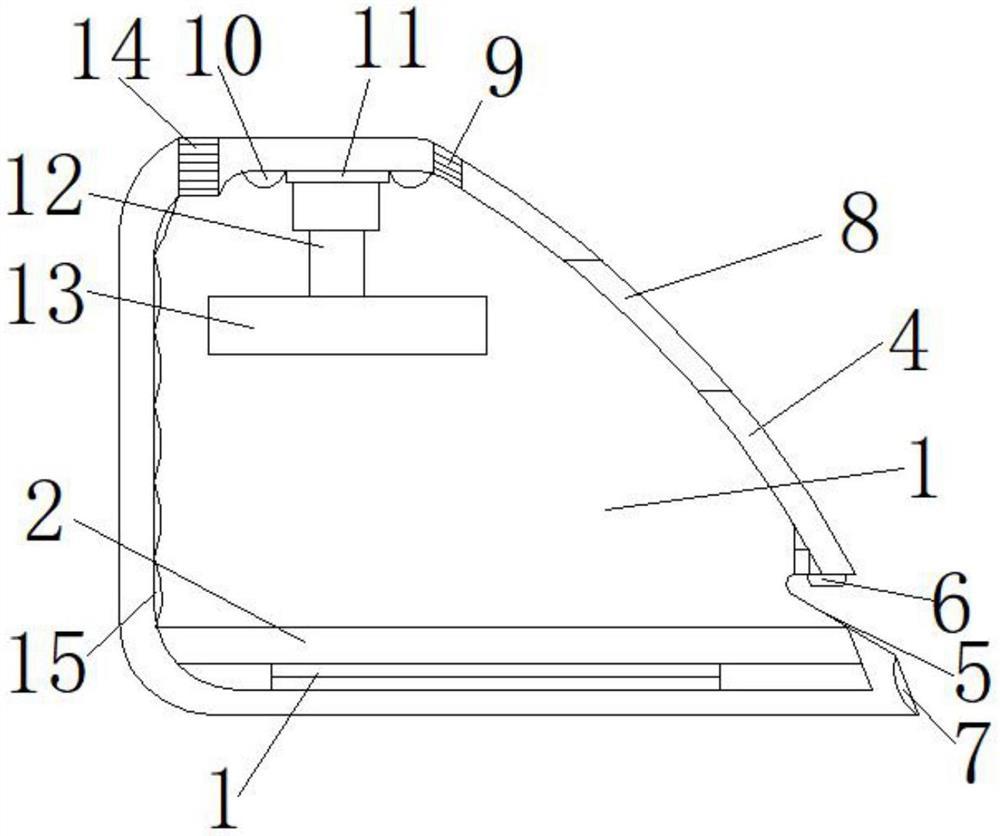
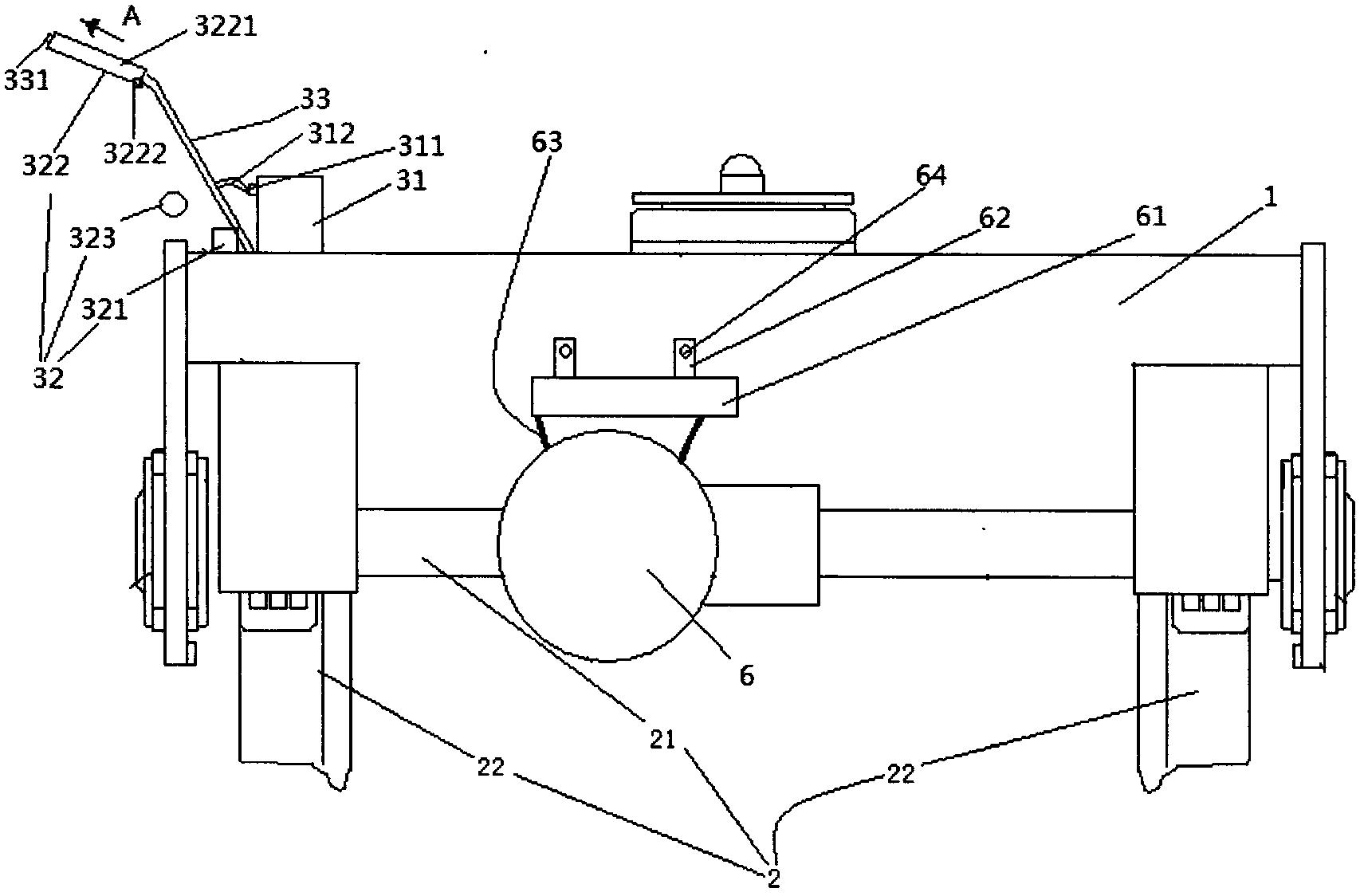
图1为高架宽体电车右视结构示意图。
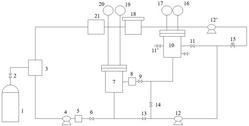
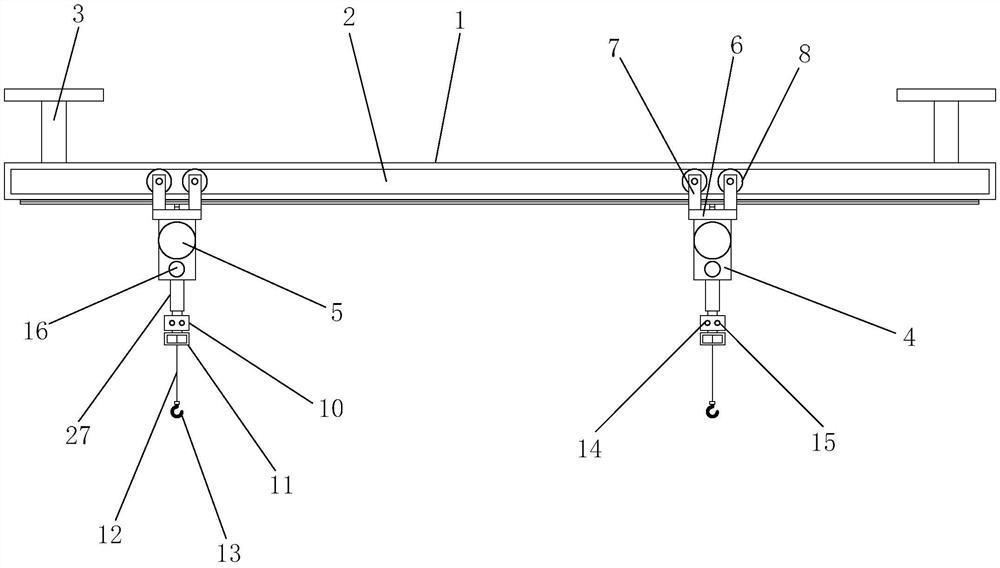
图2为无人驾驶高架宽体电车右视整体结构示意图。
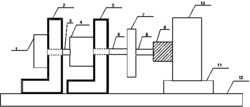
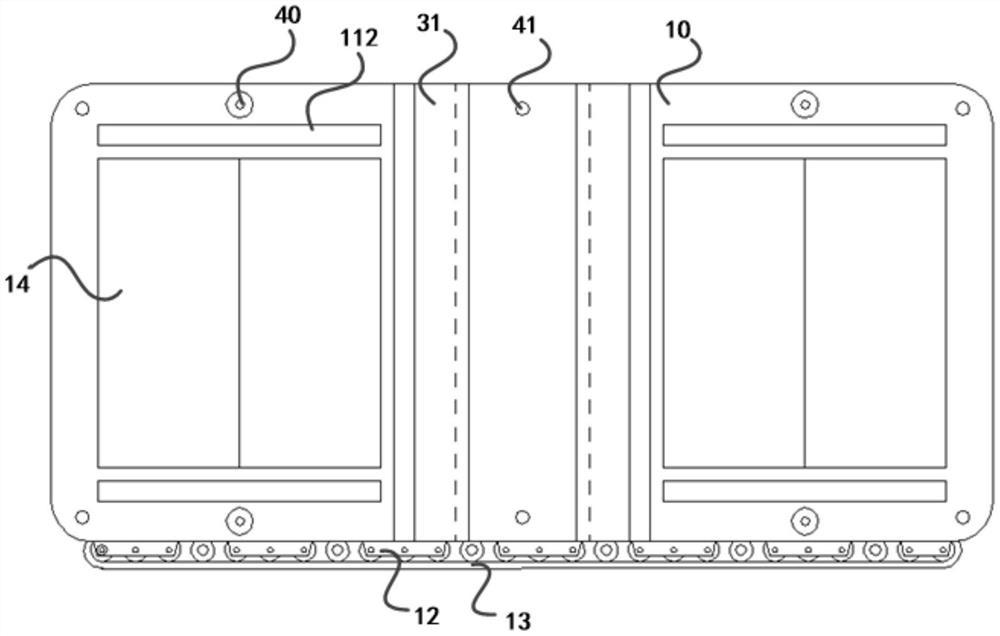
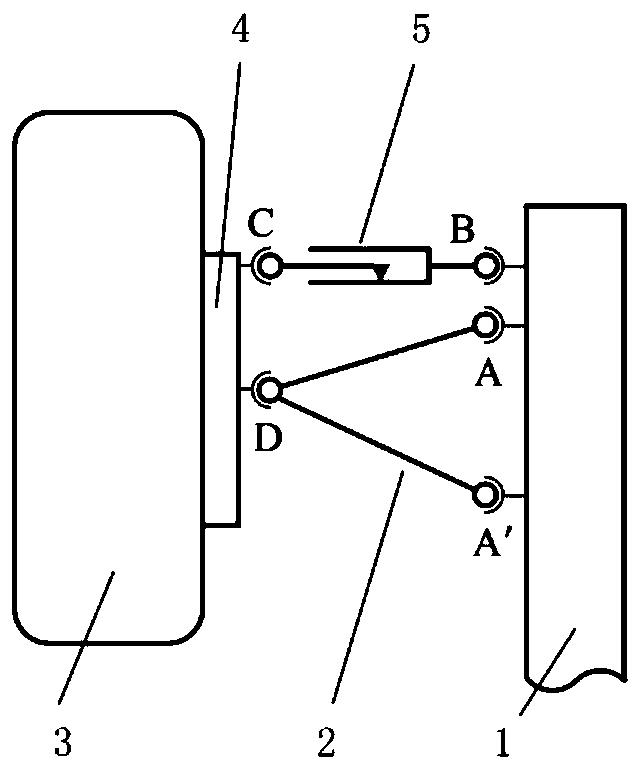
图3为无人驾驶高架宽体电车后视整体结构示意图。
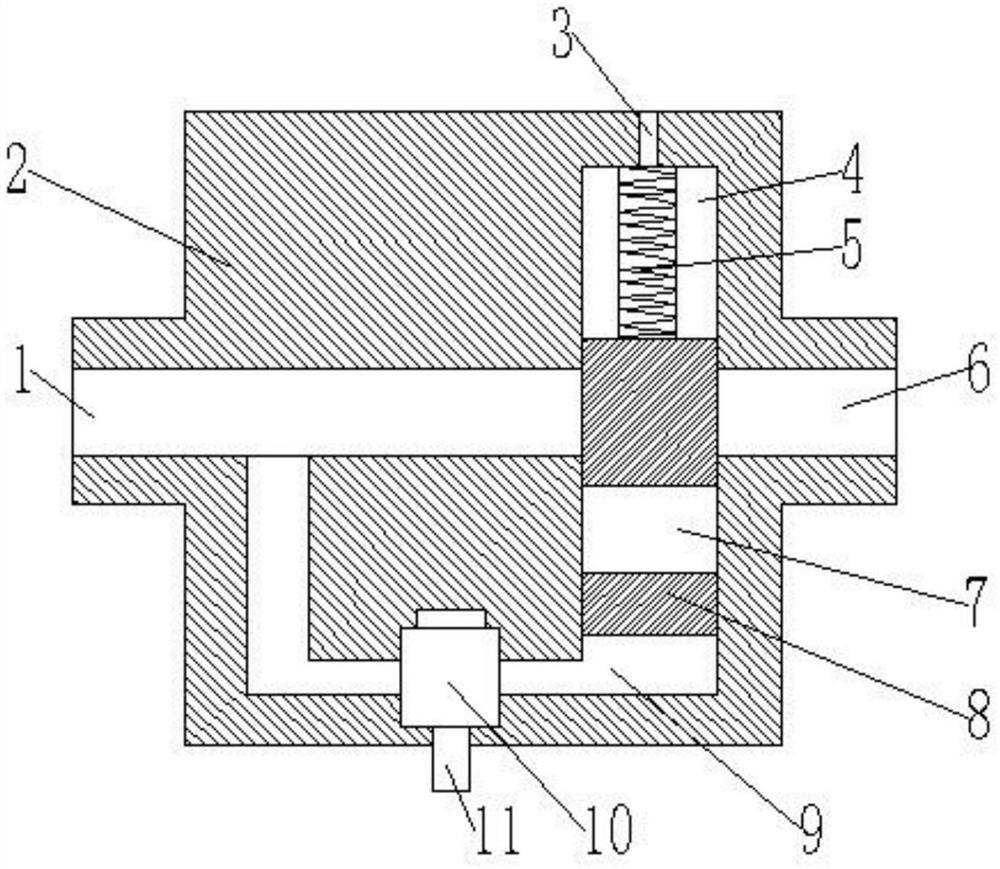
图4为供电导轨后视结构示意图。
具体实施方式
下面结合附图作进一歩说明。
在图1、图2、图3、图4中,所述高架宽体电车设置宽体乘客车厢1和窄体高架车厢2,宽体乘客车厢设置在窄体高架车厢上面,宽体乘客车厢与窄体高架车厢前后端对齐,窄体高架车厢上面左右端位于宽体乘客车厢下面左右端的中间位置,宽体乘客车厢的宽度大于大客车宽度,窄体高架车厢的宽度小于一般小汽车的宽度,从地面到窄体高架车厢上端的高度大于一般小汽车的高度,窄体高架车厢中间左右边设置左车门和右车门3,左车门和右车门均为电脑控制的自动进出口门,窄体高架车厢内设置前楼梯4和后楼梯5,宽体乘客车厢底部前方设置乘客入口6,乘客入口上端设置前护栏7,宽体乘客车厢底部后方设置乘客出口8,乘客出口上端设置后护栏9,宽体乘客车厢顶部前端设置室外控制台10,室外控制台上设置前视摄像机11、左视摄像机和右视摄像机12,宽体乘客车厢内部设置室内摄像机13和语音播放器14,宽体乘客车厢前端设置控制台,控制台内设置车载计算机,宽体乘客车厢前面设置投币箱15,投币箱上端设置刷卡机,窄体高架车厢的前灯左、右端设置前左、右激光雷达16,后灯左、右端设置后左、右激光雷达17,所述车载计算机根据前视摄像机前方拍摄的图像信息,识别红绿灯标志,车载计算根据左、右视摄像机拍摄的左、右路旁图像信息,识别中途站台的标志,根据前后左右的激光雷达探测到周围障碍物的距离信息和室内外摄像机拍摄的乘客图像信息,车载计算机综合分析、比较、识别、处理各种信息、准确控制无人驾驶高架宽体电车的开门、关门、语音报站提示、起步、加速、减速和停车的一系列动作,车载计算机设置宽带通信发射、接收模块,通过发射和接收天线,公交调度监控室不仅能实时监控车辆现场,而且可以实时遥控无人驾驶高架宽体电车,指挥人员根据无人驾驶高架宽体电车的运行状况实时监控,可以对无人驾驶高架宽体电车进行人工操作;所述窄体高架车厢下端设置底盘框架18,底盘框架前方左右端设置轴承架,轴承架内安装前左轴承和前右轴承19,前左轴承和前右轴承内安装前轮轴20,前轮轴左右端紧配安装左前轮和右前轮21,前轮轴中间紧配安装前导向轮,前导向轮圆周制有前齿轮圈22,所述底盘框架前上方左右端设置前电机轴23,前电机轴右侧设置前驱电机24,前驱电机左边设置前驱齿轮25,前驱齿轮与前齿轮圈啮合,前驱电机同时驱动前导向轮、左前轮和右前轮,底盘框架后方左右端设置轴承架,轴承架内安装后左轴承26和后右轴承27,后左轴承和后右轴承内安装后轮轴28,后轮轴左右端紧配安装左后轮29和右后轮30,后轮轴中间紧配安装后导向轮31,后导向轮圆周制有后齿轮圈32,所述底盘框架后上方左右端设置后电机轴33,后电机轴右侧设置后驱电机34,后驱电机左边设置后驱齿轮35,后驱齿轮与后齿轮圈啮合,后驱电机同时驱动后导向轮、左后轮和右后轮,底盘框架设置前横梁36,前横梁中间焊接前连接板37,前连接板下方制有前轮孔38,前轮孔左右端设置左一轮架和右一轮架39,左一、右一轮架前后端设置前螺丝螺帽40、41、42、43,4个前螺丝螺帽将左一、右一轮架紧固在前连接板下方左右端,左一、右一轮架设置前滑轮轴44,前滑轮轴中间安装前滑轮45,前滑轮小于前轮孔,与前轮孔同心;底盘框架设置后横梁46,后横梁中间焊接后连接板47,后连接板下方制有后轮孔48,后轮孔左右端设置左二轮架49和右二轮架50,左二、右二轮架前后端设置后螺丝螺帽51、52、53、54,4个后螺丝螺帽将左二、右二轮架紧固在后连接板下方左右端,左二、右二轮架设置后滑轮轴55,后滑轮轴中间安装后滑轮56,后滑轮小于后轮孔,与后轮孔同心,后连接板下端设置受电杆57,所述受电杆为塑料制品,受电杆中部制有连接槽58,后连接板下端位于连接槽内,连接槽中间设置连接轴59,连接轴将受电杆与后连接板连接后受电杆能上下翘动,受电杆后端制有方孔,方孔内安装炭刷60,炭刷内设置螺孔和螺帽61,受电杆右后端设置炭刷螺丝钉62,炭刷螺丝钉将炭刷与受电杆紧固,炭刷螺丝钉压紧一个焊片63,焊片上焊接炭刷引线64,后连接板前端焊接J形扁管65,炭刷引线从J形扁管内引进窄体高架车厢,J形扁管前端焊接拉簧支架66,受电杆前端制有拉簧孔,拉簧支架与拉簧孔之间安装拉簧67,所述左前轮、右前轮、左后轮和右后轮是4个规格一致的铸铁车轮,所述前导向轮和后导向轮是2个规格一致的铸铁导向轮;所述供电导轨设置在城区某一路直行的公交路线上,城区双向道路中间设置隔离栏,隔离栏两侧是两个往返的单向道路,单向道路分为左转车道、直行车道和右转车道,供电导轨设置在直行车道中间,公交路线的首末端设置首端大转弯圆形车道和末端大转弯圆形车道,首、末端圆形车道与双向道路的两个直行车道首末端连接成封闭循环车道,供电导轨设置在循环车道中间。
所述供电导轨设置供电槽68, 所述供电槽是在循环车道中间开挖壕沟,壕沟底部中线设置无数地桩69,每个地桩前后距离均为7米,地桩上面设置供电槽,供电槽上端制有左连接边70和右连接边71,左、右连接边和供电槽以及无数地桩用钢筋混凝土整体浇制,形成长距离封闭循环的供电槽,供电槽的总长度约等于公交路线首末端长度的2倍,供电槽底部中线设置无数个绝缘柱72,绝缘柱选用高压线瓷瓶,每个绝缘柱之间的前后距离均为7米,绝缘柱下端均设置下连接板73,下连接板由左、右螺丝钉74、75紧固在供电槽底部,绝缘柱上端均设置上连接板76,上连接板设置前、后螺丝孔和前、后螺丝钉77、78,上连接板右上端设置L型铜排79,L型铜排长度为7米,L型铜排前、后端制有连接孔,由前、后螺丝钉将前端的L型铜排与后端的L型铜排固定在上连接板的前、后端,前端的L型铜排与后端的L型铜排之间的连接处靠紧,对齐成一条直线后紧固,由无数个绝缘柱和上连接板将无数根L型铜排连接成长距离火线电轨,所述长距离火线电轨的首端或者末端连接交流220V电源的火线,长距离火线电轨经过绝缘柱对地绝缘,有效防止路面雨水造成漏电,供电槽底部设置抽水装置,如遇雨天及时排水,以满足供电槽内的电绝缘条件,所述供电轨道在供电槽左连接边上面设置左双连轨道80,供电槽右连接边上面设置右双连轨道81,左、右双连轨道的长度为7米,左、右双连轨道位于供电槽左、右连接边上面的图形是左右对称的,左双连轨道前后端均设置2个左螺丝螺帽82、83,左连接边设置与前、后2个左螺丝螺帽对应的4个左安装孔,由4个左螺丝螺帽将左双连轨道固定在左连接边上面,无数左双连轨道按前后顺序排列在左连接边上面,以同样的固定方式安装;右双连轨道前后端设置2个右螺丝螺帽84、85,右连接边设置与前、后2个右螺丝螺帽对应的4个右安装孔,由4个右螺丝螺帽将右双连轨道固定在右连接边上面,无数右双连轨道按前后顺序排列在右连接边上面,以同样的固定方式安装,左双连轨道的前后端均制有2个左连接耳,前端的左双连轨道与后端的左双连轨道之间的连接处靠紧,对齐成一条直线后由2个左对接螺丝螺帽86、87紧固,无数左双连轨道的前后端相连,连接成长距离左双连轨道,右双连轨道的前后端均制有2个右连接耳,前端的右双连轨道与后端的右双连轨道之间的连接处靠紧,对齐成一条直线后由2个右对接螺丝螺帽88、89紧固,无数右双连轨道的前后端相连,连接成长距离右双连轨道,所述长距离左、右双连轨道的首端或者末端连接交流220V电源的地线,长距离左、右双连轨道之间形成4个平行的轨道,位于4个轨道中间的两个轨道截面是L形,是左窄轨道90和右窄轨道91左、右窄轨道之间形成一个平行的导向槽92,导向槽的宽度为3厘米,左、右窄轨道的上端面为导向双轨,左、右窄轨道的下端面为衔接双轨,位于4个轨道两边的两个轨道截面是工字形,是左工字形轨道93和右工字形轨道94,左、右工字形轨道之间的距离小于1米,左、右工字形轨道为载重双轨,所述供电轨道整体完成后,所述壕沟内填土掩埋供电槽,供电槽左右边修成柏油路95,所述左工字形轨道与左窄轨道之间的槽口内修成左边带柏油路面96,所述右工字形轨道与右窄轨道之间的槽口内修成右边带柏油路面97,所述左边带柏油路面、右边带柏油路面与柏油路平面的高度一致,所述左、右窄轨道和左、右工字形轨道上端面均高于柏油路平面3毫米,所述前齿轮圈和后齿轮圈均位于导向槽内,前导向轮和后导向轮的左右端均滚动在导向双轨上面,无论供电导轨向左或者向右转弯,前导向轮和后导向轮跟随导向双轨左右导向,引导高架宽体电车左右转弯,左前轮、右前轮、左后轮和右后轮始终滚动在所述载重双轨上面,所述前连接板和后连接板规格一致,由1厘米厚的钢板制造成型,均位于导向槽内中间,前连接板和后连接板上安装的前滑轮和后滑轮的左右端中心均设置左轴承98和右轴承99,前、后滑轮圆周均制有导向圈100,前、后滑轮的导向圈均位于导向槽内,前滑轮和后滑轮的左右端均滚动在所述衔接双轨下面,无论供电导轨向左或者向右转弯,前滑轮和后滑轮跟随衔接双轨左右导向,使所述受电杆的炭刷下端始终滑动动在所述火线电轨上面,所述拉簧使炭刷接触火线电轨始终保持一定的压力。
所述前驱电机和后驱电机是同样型号的无刷无齿外转子永磁电机,前驱电机和后驱电机分别设置对应的前控制器和后控制器,窄体高架车厢内设置整流器,由炭刷引进窄体车厢的交流220V的电源火线连接整流器输入端,供电导轨经过前、后车轮将交流220V的电源地线连接到底盘框架,底盘框架设置接铁线连接整流器输入端,整流器输出220V的直流电源到前控制器和后控制器,前控制器输出端连接到前驱电机,后控制器输出端连接到后驱电机,前、后控制器的输入端连接到车载计算机,车载计算机控制前、后车轮和前、后导向轮共计六个车轮都具有相同的驱动力和制动力,都属于电力驱动和电力制动,增强了无人驾驶高架宽体电车的驱动力和制动力,所述无人驾驶高架宽体电车没有方向盘,没有脚踏油门和脚踏制动,全部是车载计算机控制电车的起步、加速和制动,前、后导向轮在导向双轨的导向槽内产生转弯力度,实现无人驾驶高架宽体电车的自动转向。
所述供电导轨设置在城市道路的直行车道上,供电导轨没有改变机动车道的基本属性,属于铁路、公路两用的机动车道,供电导轨的左、右窄轨道和左、右工字形轨道上端面仅仅高于柏油路平面3毫米,与柏油路基本面相差无几,左、右工字形轨道之间的距离小于1米,所述导向槽的宽度仅有3厘米,因此供电导轨不影响路面行人和车辆通行,无人驾驶高架宽体电车的中途公交站台设置在人行横道的斑马线上,窄体高架车厢的左、右车门都可使用,方便左右人行道的乘客经过左、右车门和前、后楼梯上下高架宽体电车,高架宽体电车左右平衡时,重心在左右车轮之间,高架宽体电车左右不平衡时,重心在左右车轮之外,所述前、后滑轮压在所述衔接双轨下面,通过所述前、后连接板拉住高架宽体电车,使供电导轨与高架宽体电车牢固连接,所述供电导轨依靠无数个地桩支撑高架宽体电车在左右重心不平衡时的重力,充分利用地下基础稳定高架宽体电车的平衡;所述无人驾驶高架宽体电车在固定的轨道上行驶,属于一个槽口的轨道交通模式,不需要导航,不存在视觉导航的可靠性问题,所述高架宽体电车上面是宽体乘客车厢,下面是窄体高架车厢,高架宽体电车在城区双向道路中间行驶,宽体乘客车厢在两辆高架宽体电车双向道路相遇时不会接触,高架宽体电车遇到所有十字路口都是直行不转弯,允许多辆高架宽体电车在同一条公交路线上共用同一条供电导轨,在同方向的公交路线首末端循环行驶,解决了公交路线多车调度和协调问题,高架宽体电车始终沿着直行车道行驶,中途不变道,与其它交通参与者共享一个车道的路权,不影响其他车道的车辆通行,不与红绿灯指挥规则发生矛盾,解决了与其它交通参与者的交互问题,所述窄体高架车厢仅占用很窄的路面,宽体乘客车厢利用上层空间增大车厢容量,不影响宽体乘客车厢下面的车辆通行,实现顺畅的立体交通,缓解了交通拥堵问题,无人驾驶高架宽体电车自身无需携带任何能源,在行驶中接受供电轨道提供的电网电源,实现真正的节能环保,所述无人驾驶高架宽体电车与轨道交通的地铁和轻轨相比成本最低。
无人驾驶高架宽体电车专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0