









专利摘要
本发明公开一种电子元器件上料定距机构及其电子元器件点焊设备。电子元器件上料定距机构包括:上料流水线、定距装置、切离装置。定距装置包括:定距移送基座、水平往复移送部、竖直升降插拔部、定距移送杆、定距移送辅助结构;切离装置包括切离驱动部及与切离驱动部驱动连接的切离伸缩杆,切离伸缩杆由定距移送通道的入料端进入或脱离定距移送通道。本发明的电子元器件上料定距机构,通过设置上料流水线、定距装置、切离装置,并对各个装置的结构进行优化设计,在实现对电子元器件进行自动化上料的基础上,还能够实现将多个电子元器件彼此相互间隔开来,以便于后续的点焊机构对电子元器件进行点焊操作。
权利要求
1.一种电子元器件上料定距机构,其特征在于,包括:上料流水线、定距装置、切离装置;
所述上料流水线具有上料端及出料端;
所述定距装置包括:定距移送基座、水平往复移送部、竖直升降插拔部、定距移送杆、定距移送辅助结构;
所述定距移送基座包括左侧定距移送条及右侧定距移送条,所述左侧定距移送条与所述右侧定距移送条相互平行且间隔设置,所述左侧定距移送条与所述右侧定距移送条之间形成定距移送通道,所述定距移送通道具有入料端,所述定距移送通道的入料端与所述上料流水线的出料端衔接;
所述竖直升降插拔部与所述水平往复移送部驱动连接,所述水平往复移送部驱动所述竖直升降插拔部沿水平方向往复移动;所述定距移送杆与所述竖直升降插拔部驱动连接,所述竖直升降插拔部驱动所述定距移送杆沿竖直方向往复升降;所述定距移送杆由所述定距移送通道的底部进入或脱离所述定距移送通道;所述定距移送杆上开设有多个定距移送插拔槽,多个所述定距移送插拔槽呈直线依次间隔排布;
所述定距移送辅助结构包括定距移送辅助气缸及设于所述定距移送辅助气缸伸缩端的定距移送辅助板,所述定距移送辅助板封堵或敞开于所述定距移送通道的顶部;
所述切离装置包括切离驱动部及与所述切离驱动部驱动连接的切离伸缩杆,所述切离伸缩杆由所述定距移送通道的入料端进入或脱离所述定距移送通道。
2.根据权利要求1所述的电子元器件上料定距机构,其特征在于,所述左侧定距移送条上开设有左侧定距移送槽,所述右侧定距移送条上开设有右侧定距移送槽,所述左侧定距移送槽及所述右侧定距移送槽位于所述定距移送通道内。
3.根据权利要求1所述的电子元器件上料定距机构,其特征在于,所述水平往复移送部包括水平往复移送气缸及设于所述水平往复移送气缸伸缩端的水平往复移送座,所述水平往复移送气缸驱动所述水平往复移送座沿水平方向往复移动。
4.根据权利要求1所述的电子元器件上料定距机构,其特征在于,所述竖直升降插拔部包括竖直升降插拔气缸及设于所述竖直升降插拔气缸伸缩端的竖直升降插拔座,所述竖直升降插拔气缸安装于所述水平往复移送座上,所述定距移送杆设于所述竖直升降插拔座上。
5.根据权利要求1所述的电子元器件上料定距机构,其特征在于,所述上料流水线为直线式流水线结构。
6.根据权利要求1所述的电子元器件上料定距机构,其特征在于,所述上料流水线包括上料支撑架及设于所述上料支撑架上的传送带。
7.根据权利要求6所述的电子元器件上料定距机构,其特征在于,所述上料流水线还包括与所述传送带驱动连接的上料传送电机。
8.根据权利要求7所述的电子元器件上料定距机构,其特征在于,所述上料传送电机为伺服电机。
9.根据权利要求1所述的电子元器件上料定距机构,其特征在于,所述切离驱动部为气缸驱动结构。
10.一种电子元器件点焊设备,其特征在于,包括权利要求1至9中任意一项所述的电子元器件上料定距机构,还包括与所述电子元器件上料定距机构配合的电子元器件点焊机构。
说明书
技术领域
本发明涉及电子元器件点焊技术领域,特别是涉及一种电子元器件上料定距机构及其电子元器件点焊设备。
背景技术
如图1所示,其为一种电子元器件10的结构图,电子元器件10包括上壳体11及与上壳体11卡合的下壳体12,相关的电子元件收容于上壳体11和下壳体12所形成的腔体内。在实际的生产过程中,将上壳体11和下壳体12卡合之后,还需要对上壳体11和下壳体12之间的结合处进行点焊处理,从而进一步加强上壳体11与下壳体12的连接牢固度。
由图1可知,电子元器件10为方形体结构,方形体结构的电子元器件10具有四个侧面,在实际的点焊过程中,需要对电子元器件10的四个侧面都进行点焊处理,每一侧面进行一次点焊。
电子元器件10的体积跟人的拇指差不多大小,属于小体积的元器件。设计人员在电子元器件点焊设备的设计过程中,首先需要考虑的是如何设计一种用于对电子元器件10进行自动化上料的机构。而为了提高对电子元器件10进行点焊的效率,需要一次性将多个电子元器件10上料于相关于点焊机构中,因此,自动化上料机构在实现对电子元器件10进行自动化上料的基础上,还需要能够实现将多个电子元器件10彼此相互间隔开来,以便于后续的点焊机构对电子元器件10进行点焊操作。
发明内容
本发明的目的是克服现有技术中的不足之处,提供一种电子元器件上料定距机构及其电子元器件点焊设备,在实现对电子元器件进行自动化上料的基础上,还能够实现将多个电子元器件彼此相互间隔开来,以便于后续的点焊机构对电子元器件进行点焊操作。
本发明的目的是通过以下技术方案来实现的:
一种电子元器件上料定距机构,包括:上料流水线、定距装置、切离装置;
所述上料流水线具有上料端及出料端;
所述定距装置包括:定距移送基座、水平往复移送部、竖直升降插拔部、定距移送杆、定距移送辅助结构;
所述定距移送基座包括左侧定距移送条及右侧定距移送条,所述左侧定距移送条与所述右侧定距移送条相互平行且间隔设置,所述左侧定距移送条与所述右侧定距移送条之间形成定距移送通道,所述定距移送通道具有入料端,所述定距移送通道的入料端与所述上料流水线的出料端衔接;
所述竖直升降插拔部与所述水平往复移送部驱动连接,所述水平往复移送部驱动所述竖直升降插拔部沿水平方向往复移动;所述定距移送杆与所述竖直升降插拔部驱动连接,所述竖直升降插拔部驱动所述定距移送杆沿竖直方向往复升降;所述定距移送杆由所述定距移送通道的底部进入或脱离所述定距移送通道;所述定距移送杆上开设有多个定距移送插拔槽,多个所述定距移送插拔槽呈直线依次间隔排布;
所述定距移送辅助结构包括定距移送辅助气缸及设于所述定距移送辅助气缸伸缩端的定距移送辅助板,所述定距移送辅助板封堵或敞开于所述定距移送通道的顶部;
所述切离装置包括切离驱动部及与所述切离驱动部驱动连接的切离伸缩杆,所述切离伸缩杆由所述定距移送通道的入料端进入或脱离所述定距移送通道。
在其中一个实施例中,所述左侧定距移送条上开设有左侧定距移送槽,所述右侧定距移送条上开设有右侧定距移送槽,所述左侧定距移送槽及所述右侧定距移送槽位于所述定距移送通道内。
在其中一个实施例中,所述水平往复移送部包括水平往复移送气缸及设于所述水平往复移送气缸伸缩端的水平往复移送座,所述水平往复移送气缸驱动所述水平往复移送座沿水平方向往复移动。
在其中一个实施例中,所述竖直升降插拔部包括竖直升降插拔气缸及设于所述竖直升降插拔气缸伸缩端的竖直升降插拔座,所述竖直升降插拔气缸安装于所述水平往复移送座上,所述定距移送杆设于所述竖直升降插拔座上。
在其中一个实施例中,所述上料流水线为直线式流水线结构。
在其中一个实施例中,所述上料流水线包括上料支撑架及设于所述上料支撑架上的传送带。
在其中一个实施例中,所述上料流水线还包括与所述传送带驱动连接的上料传送电机。
在其中一个实施例中,所述上料传送电机为伺服电机。
在其中一个实施例中,所述切离驱动部为气缸驱动结构。
一种电子元器件点焊设备,包括上述的电子元器件上料定距机构,还包括与所述电子元器件上料定距机构配合的电子元器件点焊机构。
本发明的一种电子元器件上料定距机构,通过设置上料流水线、定距装置、切离装置,并对各个装置的结构进行优化设计,在实现对电子元器件进行自动化上料的基础上,还能够实现将多个电子元器件彼此相互间隔开来,以便于后续的点焊机构对电子元器件进行点焊操作。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
图1为一种电子元器件的结构图;
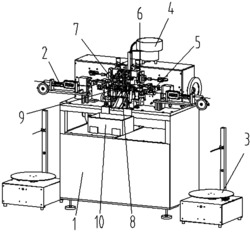
图2为本发明一实施例的电子元器件点焊设备的整体结构图;
图3为图2所示的电子元器件点焊设备的局部结构图;
图4为图3在A处的放大图;
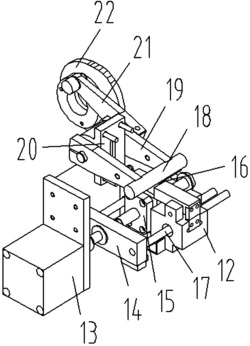
图5为图3所示的电子元器件上料定距机构的定距装置的结构图;
图6为图5所示的定距装置的局部图;
图7为图6在B处的放大图;
图8为图3所示的电子元器件点焊机构的移送装置及钟摆式翻转装置的结构图;
图9为图3所示的电子元器件点焊机构的点焊装置的结构图;
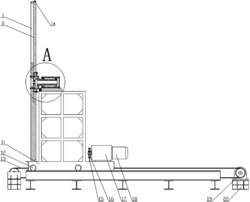
图10为位于下料流水线尾端的下料机械手的结构图。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
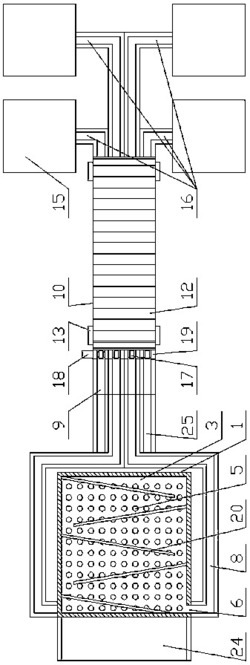
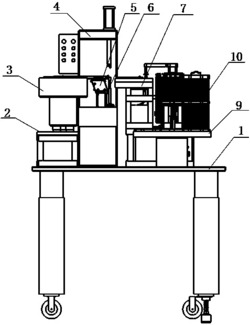
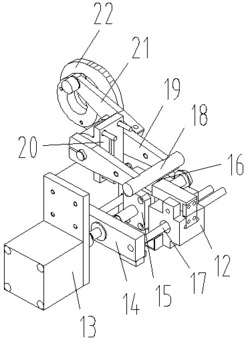
如图2所示,一种电子元器件点焊设备20,包括电子元器件上料定距机构21及与电子元器件上料定距机构21配合的电子元器件点焊机构22。电子元器件上料定距机构21用于对电子元器件10进行自动化上料,在实现对电子元器件10进行自动化上料的基础上,还实现将多个电子元器件10呈直线式排布并彼此相互间隔开来,以便于后续的点焊机构对电子元器件10进行点焊操作。电子元器件点焊机构22用于对电子元器件10的四个侧面都进行点焊处理,每一侧面进行一次点焊。
下面,对电子元器件上料定距机构21的具体结构及各部件的连接关系进行说明,从而说明电子元器件上料定距机构21是如何在实现对电子元器件10进行自动化上料的基础上,还实现将多个电子元器件10呈直线式排布并彼此相互间隔开来,以便于后续的点焊机构对电子元器件10进行点焊操作。
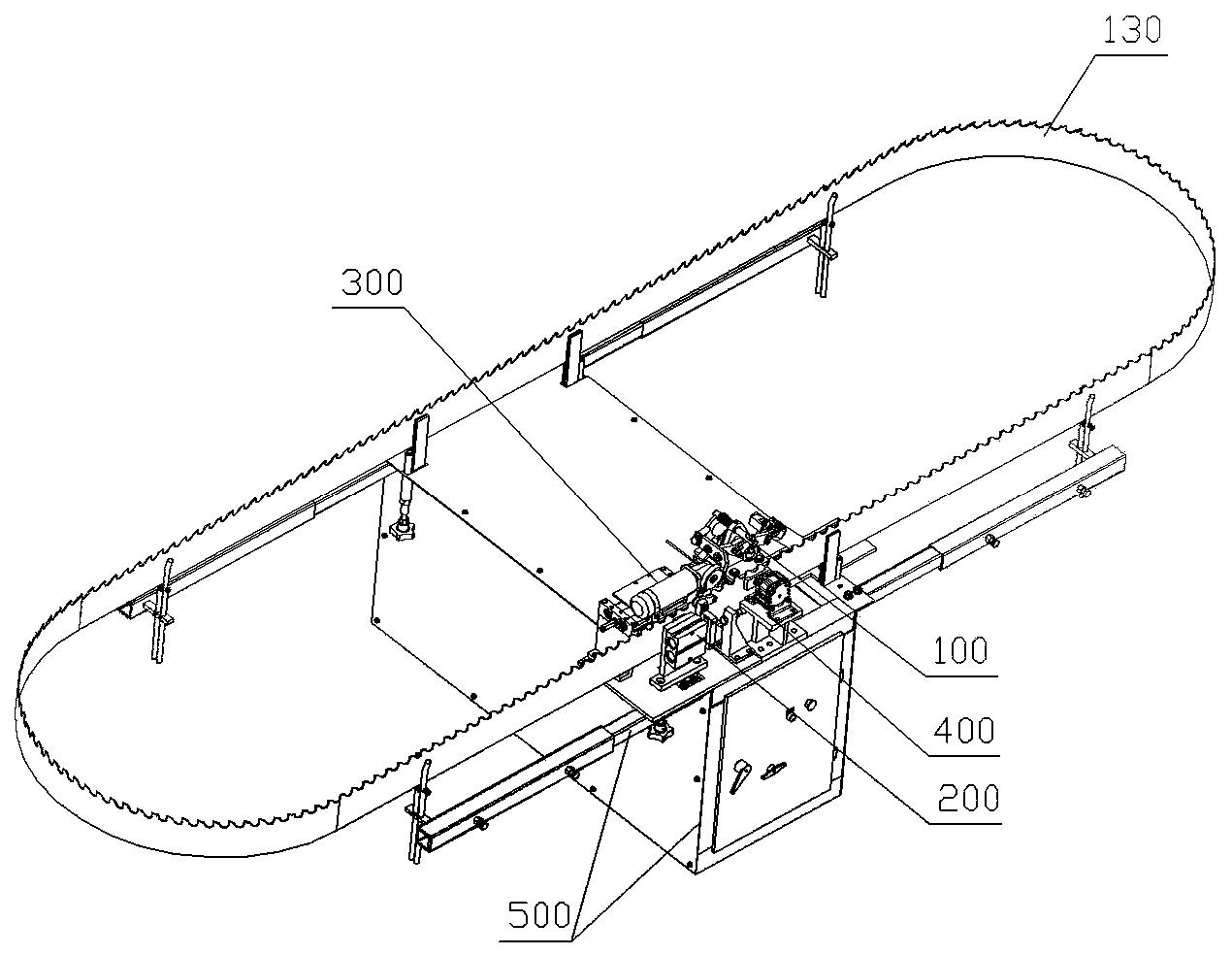
如图3所示,一种电子元器件上料定距机构21,包括:上料流水线100、定距装置200、切离装置300。
上料流水线100具有上料端110及出料端120。进一步的,上料流水线100为直线式流水线结构,上料流水线100包括上料支撑架130及设于上料支撑架130上的传送带(图未示)。上料流水线100还包括与传送带驱动连接的上料传送电机(图未示)。在本实施例中,电机为伺服电机。
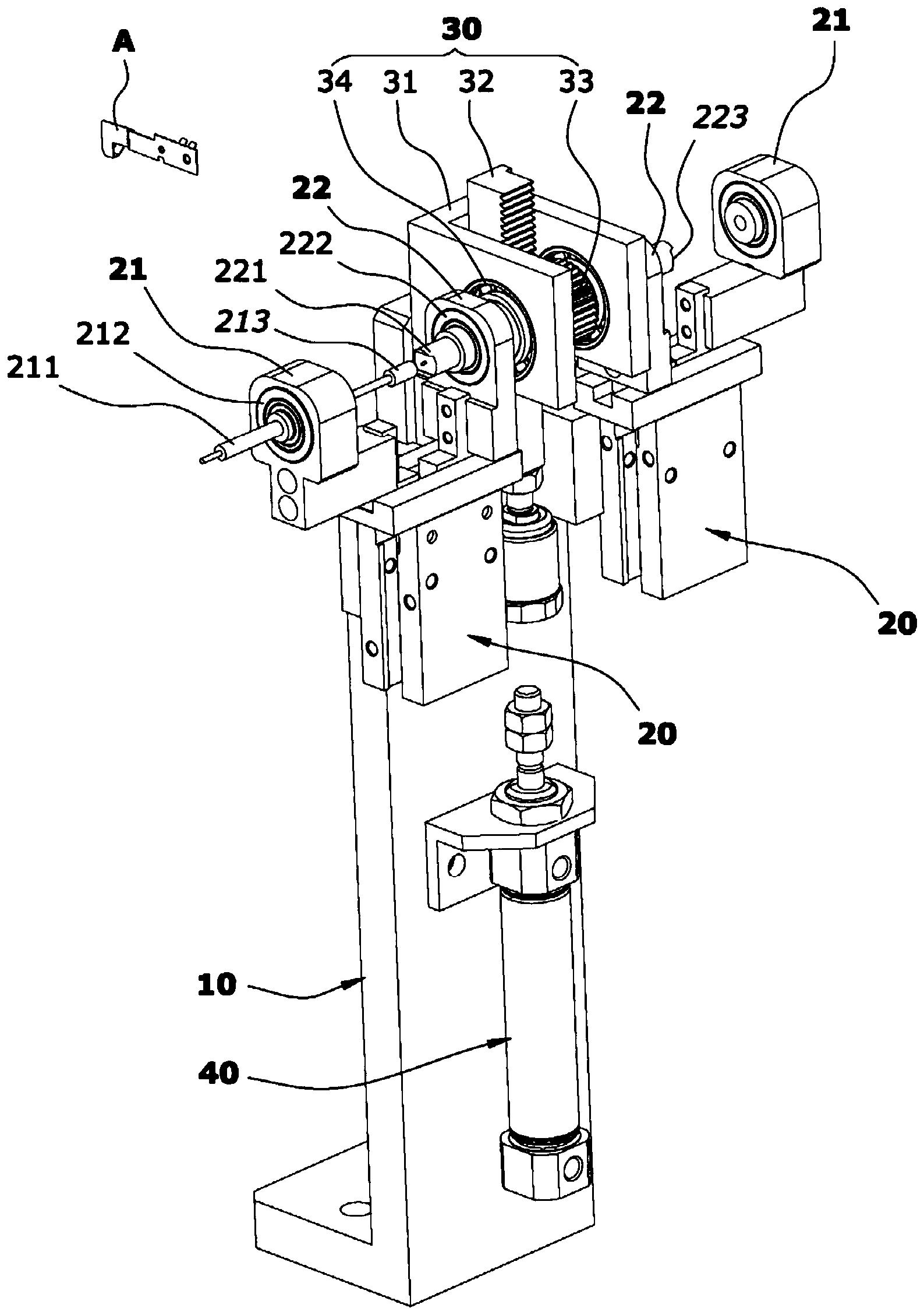
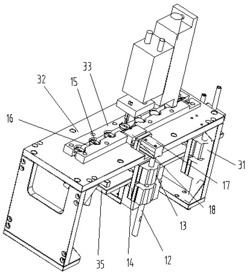
如图5所示,定距装置200包括:定距移送基座210、水平往复移送部220、竖直升降插拔部230、定距移送杆240、定距移送辅助结构250。
如图6及图7所示,定距移送基座210包括左侧定距移送条211及右侧定距移送条212,左侧定距移送条211与右侧定距移送条212相互平行且间隔设置,左侧定距移送条211与右侧定距移送条212之间形成定距移送通道213,定距移送通道213具有入料端214,定距移送通道213的入料端214与上料流水线100的出料端120衔接。如图7所示,进一步的,左侧定距移送条211上开设有左侧定距移送槽215,右侧定距移送条212上开设有右侧定距移送槽216,左侧定距移送槽215及右侧定距移送槽216位于定距移送通道213内。
如图5所示,竖直升降插拔部230与水平往复移送部220驱动连接,水平往复移送部220驱动竖直升降插拔部230沿水平方向往复移动;定距移送杆240与竖直升降插拔部230驱动连接,竖直升降插拔部230驱动定距移送杆240沿竖直方向往复升降;定距移送杆240由定距移送通道213的底部进入或脱离定距移送通道213;定距移送杆240上开设有多个定距移送插拔槽241(如图7所示),多个定距移送插拔槽241呈直线依次间隔排布。如图5所示,具体的,水平往复移送部220包括水平往复移送气缸221及设于水平往复移送气缸221伸缩端的水平往复移送座222,水平往复移送气缸221驱动水平往复移送座222沿水平方向往复移动;竖直升降插拔部230包括竖直升降插拔气缸231及设于竖直升降插拔气缸231伸缩端的竖直升降插拔座232,竖直升降插拔气缸231安装于水平往复移送座222上,定距移送杆240设于竖直升降插拔座232上。
如图6所示,定距移送辅助结构250包括定距移送辅助气缸251及设于定距移送辅助气缸251伸缩端的定距移送辅助板252,定距移送辅助板252封堵或敞开于定距移送通道213的顶部。
如图4所示,切离装置300包括切离驱动部310及与切离驱动部310驱动连接的切离伸缩杆320,切离伸缩杆320由定距移送通道213的入料端214进入或脱离定距移送通道213。在本实施例中,切离驱动部310为气缸驱动结构。
下面,对上述结构的电子元器件上料定距机构21的工作原理进行说明:
将多个电子元器件10放置于传送带上,多个电子元器件10呈直线排布于传送带上,在上料传送电机的驱动下,传送带带动其上的多个电子元器件10由上料端110输送至出料端120处;
当电子元器件10到达上料流水线100的出料端120处,切离装置300工作,用于将出料端120处的电子元器件10切离并推送至定距装置200处,具体的,切离驱动部310驱动切离伸缩杆320伸缩,切离伸缩杆320由定距移送通道213的入料端214进入或脱离定距移送通道213,从而实现将电子元器件10由上料流水线100的出料端120处推送至定距移送通道213的入料端214;
由于左侧定距移送条211上开设有左侧定距移送槽215,右侧定距移送条212上开设有右侧定距移送槽216,左侧定距移送槽215及右侧定距移送槽216位于定距移送通道213内,因此,左侧定距移送槽215和右侧定距移送槽216可以将定距移送通道213内的电子元器件10托起,防止电子元器件10发生掉落;
定距装置200用于实现将多个电子元器件10之间相互间隔以实现定距,分为两个阶段:第一阶段是对电子元器件10进行插拔式运输,使得多个电子元器件10可以全部进入到定距移送通道213内,而在此阶段中,定距移送辅助结构250的定距移送辅助板252将定距移送通道213的顶部封堵住;第二阶段是多个电子元器件10已经完全进入到定距移送通道213内并实现了定距,此时,定距移送辅助结构250的定距移送辅助板252敞开于定距移送通道213的顶部,从而为电子元器件10取料做好准备;
具体的,在第一阶段中,水平往复移送部220驱动竖直升降插拔部230沿水平方向往复移动,竖直升降插拔部230驱动定距移送杆240沿竖直方向往复升降,定距移送杆240在水平往复移送部220和竖直升降插拔部230的配合下由定距移送通道213的底部进入或脱离定距移送通道213,并且,定距移送杆240上开设有多个用于收容和拨动电子元器件10的定距移送插拔槽241;这样,首先,定距移送杆240进入到定距移送通道213内将电子元器件10收容于定距移送插拔槽241内,然后,定距移送杆240带动电子元器件10往一侧拨动,接着,定距移送杆240脱离定距移送通道213以使得电子元器件10脱离定距移送插拔槽241,最后,定距移送杆240再反方向运动以进行复位,对下一个电子元器件10拨动做好准备;可知,定距移送杆240不断的重复动作,从而不断的将入料端214处的电子元器件10往一侧拨动,使得多个电子元器件10可以进入到定距移送通道213内并实现定距;而此时,定距移送辅助板252将定距移送通道213的顶部封堵住,这样,定距移送辅助板252可以将定距移送通道213内的电子元器件10压住,以防止电子元器件10在传输的过程中从定距移送通道213的顶部脱离出来,提高了传输的稳定性。
在此,要特别说明的是,设计人员在对定距移送基座210进行结构设计的过程中,主要是设计了两条相互平行且间隔设置的左侧定距移送条211与右侧定距移送条212,左侧定距移送条211与右侧定距移送条212之间形成定距移送通道213,可知,定距移送通道213为底部和顶部相互贯通的半开放式通道,此种半开放式的通道可以带来如下两个方面的效果:一方面,定距移送杆240可以从定距移送通道213的底部进入或脱离定距移送通道213,从而实现对多个电子元器件10的定距;另一方面,当多个电子元器件10已经完成定距后,后一工位的机械手可以非常方便的将多个电子元器件10从定距移送通道213的顶部取走。
虽然上述的半开放式的定距移送通道213给电子元器件10的定距和取出带来了有益效果,然而,定距移送杆240在对电子元器件10进行插拔式运输的过程中,电子元器件10会受到定距移送杆240的顶升力作用,于是电子元器件10会从定距移送通道213的顶部脱离出来,这样,就会使得电子元器件10不能够很好的收容于定距移送杆240的定距移送插拔槽241内,不利于对电子元器件10进行传输及定距。为了更好解决这一技术问题,特别设置了定距移送辅助结构250。可知,当定距移送杆240在对电子元器件10进行插拔式运输时,定距移送辅助板252将定距移送通道213的顶部封堵住,定距移送辅助板252可以将定距移送通道213内的电子元器件10压住,以防止电子元器件10在传输的过程中从定距移送通道213的顶部脱离出来,提高了传输的稳定性;也可知,当完成了对电子元器件10的插拔式运输时,定距移送辅助板252敞开于定距移送通道213的顶部,从而为电子元器件10取料做好准备。
下面,对电子元器件点焊机构22的具体结构及各部件的连接关系进行说明,从而说明电子元器件点焊机构22是如何对电子元器件10的四个侧面都进行点焊处理,并且每一侧面进行一次点焊。
如图8所示,一种电子元器件点焊机构22,包括:移送装置400、钟摆式翻转装置500(如图2所示)、点焊装置600(如图2及图9所示)、下料流水线700(如图2所示)。
钟摆式翻转装置500位于点焊装置600和下料流水线700之间,移送装置400用于驱动钟摆式翻转装置500沿水平方向往复移动,使得钟摆式翻转装置500可以往复于点焊装置600和下料流水线700之间。当钟摆式翻转装置500向点焊装置600一侧靠近并到达指定位置,钟摆式翻转装置500吸取定距装置200中的多个电子元器件10至点焊位置处,由点焊装置600对多个电子元器件10进行点焊处理,而当多个电子元器件10被点焊完成后,钟摆式翻转装置500向下料流水线700一侧靠近并到达指定位置,钟摆式翻转装置500将点焊过后的多个电子元器件10放置于下料流水线700上,再由下料流水线700将多个电子元器件10传输至下一个工位。
如图8所示,移送装置400包括:移送支撑架410、水平移送板420、水平移送驱动部430。水平移送板420沿水平方向滑动设于移送支撑架410上,水平移送驱动部430与水平移送板420驱动连接,水平移送驱动部430驱动水平移送板420沿水平方向往复滑动。进一步的,移送支撑架410上设有水平移送引导轨411,水平移送板420上设有水平移送滑块421,水平移送滑块421滑动设于水平移送引导轨411上。在本实施例中,水平移送驱动部430为气缸驱动结构。
如图8所示,钟摆式翻转装置500包括:翻转驱动部510、翻转支撑架520、翻转板530。翻转支撑架520固定于水平移送板420上,翻转板530转动设于翻转支撑架520上,翻转驱动部510驱动翻转板530沿翻转支撑架520往复式转动;翻转板530上安装有多根点焊吸放旋转杆531,多根点焊吸放旋转杆531呈直线依次间隔排布,翻转板530上还安装有与多根点焊吸放旋转杆531驱动连接的点焊旋转驱动部532,点焊旋转驱动部532驱动多根点焊吸放旋转杆531旋转。具体的,翻转驱动部510包括:翻转气缸511、翻转齿条512、翻转轴513。翻转轴513转动设于翻转支撑架520上,翻转轴513的一端与翻转板530连接,翻转轴513的另一端设有翻转齿轮514;翻转齿条512设于翻转气缸511的伸缩端,翻转齿轮514与翻转齿条512啮合。具体的,每两根相邻的点焊吸放旋转杆531通过皮带传送连接,点焊旋转驱动部532与其中一根点焊吸放旋转杆531驱动连接。
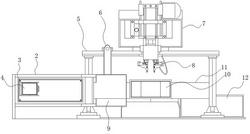
如图9所示,点焊装置600包括:点焊支撑架610、点焊水平移动座620、点焊水平驱动部630、点焊竖直升降座640、点焊竖直驱动部650、点焊头660。点焊水平移动座620沿水平方向滑动设于点焊支撑架610上,点焊水平驱动部630驱动点焊水平移动座620沿水平方向往复移动;点焊竖直升降座640沿竖直方向滑动设于点焊水平移动座620上,点焊竖直驱动部650驱动点焊竖直升降座640沿竖直方向往复升降;点焊头660安装于点焊竖直升降座640上。在本实施例中,点焊水平驱动部630为电机丝杆驱动结构,点焊竖直驱动部650为气缸驱动结构。具体的,点焊支撑架610上设有点焊水平移动引导轨611,点焊水平移动座620上设有点焊水平移动滑块621,点焊水平移动滑块621滑动设于点焊水平移动引导轨611上。
下面,对上述结构的电子元器件点焊机构22的工作原理进行描述:
水平移送板420沿水平方向滑动设于移送支撑架410上,水平移送驱动部430驱动水平移送板420沿水平方向往复滑动,于是,水平移送板420带动其上的钟摆式翻转装置500往复于点焊装置600和下料流水线700之间,实现对电子元器件10的吸取、点焊、放置过程;
当钟摆式翻转装置500到达点焊位置处时,翻转驱动部510驱动翻转板530沿翻转支撑架520向一侧转动,翻转板530进而带动其上的多根点焊吸放旋转杆531转动,于是,多根点焊吸放旋转杆531的一端可以接触并吸取定距装置200中的多个电子元器件10;
多根点焊吸放旋转杆531将多个电子元器件10吸取后,翻转驱动部510驱动翻转板530沿翻转支撑架520反方向转动90度角,于是翻转板530进而带动其上的多根点焊吸放旋转杆531反方向转动90度角,这样,多个电子元器件10也跟随着调整90度角,使得电子元器件10由平躺状态调整为竖直状态,为方便点焊装置600对电子元器件10的四个侧面进行点焊做好准备;
点焊旋转驱动部532驱动多根点焊吸放旋转杆531旋转,于是,位于点焊吸放旋转杆531一端的电子元器件10也跟随着旋转,每一次旋转90度,从而使得旋转中的电子元器件10不断得调整其侧面的朝向,极大方便了点焊装置600可以对其四个侧面进行点焊处理;
点焊装置600工作,点焊水平驱动部630驱动点焊水平移动座620沿水平方向往复移动,点焊竖直驱动部650驱动点焊竖直升降座640沿竖直方向往复升降;点焊水平驱动部630驱动点焊水平移动座620,使得点焊头660可以沿水平方向呈直线往复移动,于是,点焊头660可以从位于一侧的点焊吸放旋转杆531到达另一侧的点焊吸放旋转杆531,从而实现对多个电子元器件10进行点焊;点焊竖直驱动部650驱动点焊竖直升降座640,使得点焊头660可以沿竖直方向往复升降,于是,点焊头660可以靠近或远离电子元器件10;
要特别说明的是,点焊旋转驱动部532与点焊装置600相互配合,点焊旋转驱动部532用于实现对每一个电子元器件10的侧面朝向调整,而点焊装置600用于实现一次性能将多个电子元器件10进行点焊处理;例如,点焊旋转驱动部532用于驱动多根点焊吸放旋转杆531旋转,位于点焊吸放旋转杆531一端的电子元器件10也跟随着旋转,旋转中的电子元器件10不断得调整其侧面的朝向,方便了点焊头660对电子元器件10的每一个侧面进行点焊;又如,点焊水平驱动部630驱动点焊水平移动座620,使得点焊头660可以沿水平方向呈直线往复移动,于是,点焊头660可以从位于一侧的点焊吸放旋转杆531到达另一侧的点焊吸放旋转杆531,从而实现对多个电子元器件10进行点焊;
完成了对多个电子元器件10进行点焊处理后,移送装置400驱动钟摆式翻转装置500平移,使得钟摆式翻转装置500可以到达放料位置处;
接着,翻转驱动部510驱动翻转板530沿翻转支撑架520再进行一次反方向转动,多根点焊吸放旋转杆531复位至原来的状态,这样,原来呈竖直状态的电子元器件10则被重新调整为平躺状态,点焊吸放旋转杆531放开对电子元器件10的吸取,于是,电子元器件10则可以掉落于下料流水线700上,下料流水线700将电子元器件10运输至下一工位。
下面,对点焊吸放旋转杆531的具体结构进行说明:
实施例一,点焊吸放旋转杆531的一端设有电磁铁(图未示),这样,对线圈进行通电产生磁场,进而使得铁块获得磁性,从而实现对电子元器件10的金属外壳进行吸取;不对线圈进行通电,线圈则不会产生磁场,于是铁块的磁性消失,电子元器件10不再被吸取。可知,通过在点焊吸放旋转杆531的一端设置电磁铁,可以实现对电子元器件10的吸取或放置;
实施例二,点焊吸放旋转杆531的一端设有真空吸嘴,这样,通过真空发生器的作用,使得真空吸嘴可以对电子元器件10进行吸取或放置。
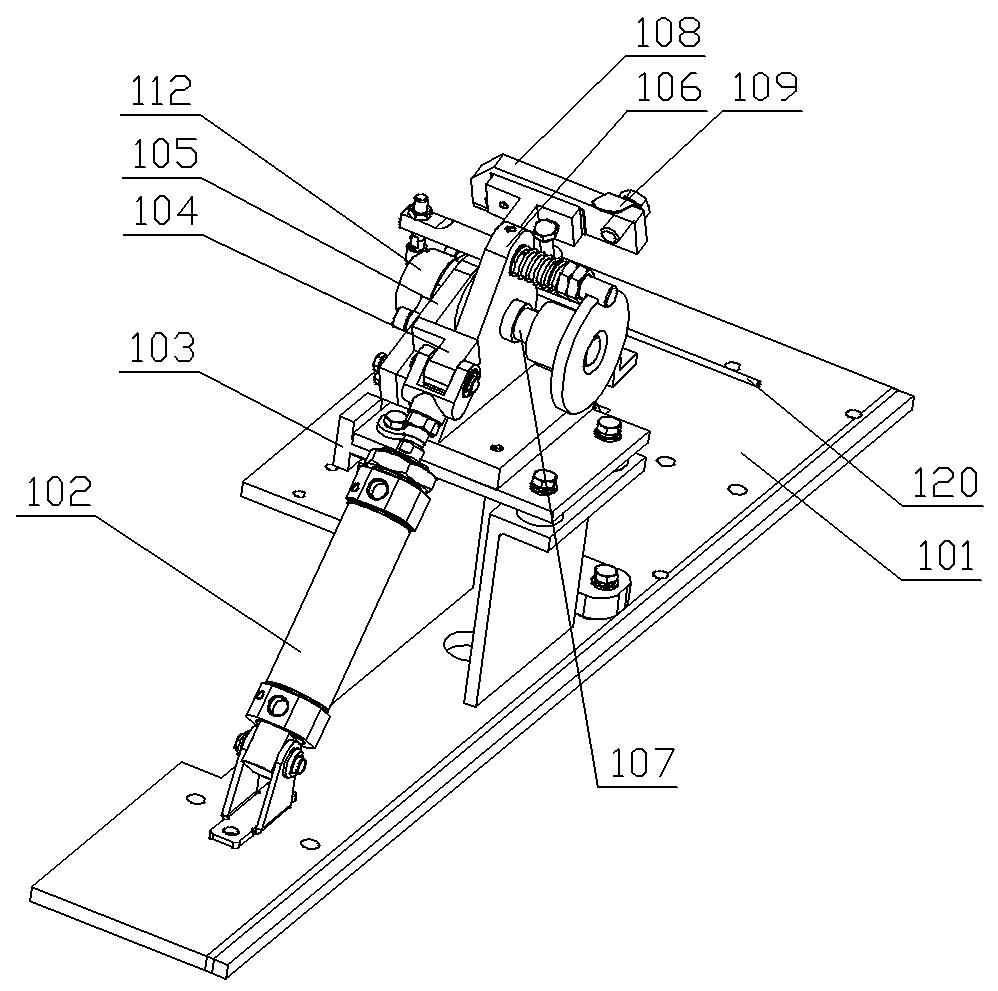
如图10所示,电子元器件点焊机构22还包括下料机械手800,下料机械手800位于下料流水线700的尾端。下料机械手800包括:下料支撑架810、下料水平移动座820、下料水平驱动气缸830、下料竖直升降座840、下料竖直驱动气缸850、下料磁铁块860。下料水平移动座820沿水平方向滑动设于下料支撑架810上,下料水平驱动气缸830驱动下料水平移动座820沿水平方向往复移动,下料竖直升降座840沿竖直方向滑动设于下料水平移动座820上,下料竖直驱动气缸850驱动下料竖直升降座840沿竖直方向往复升降,下料磁铁块860安装于下料竖直升降座840上。
下面,对下料机械手800的工作原理进行说明:
下料水平驱动气缸830驱动下料水平移动座820沿水平方向往复移动,下料竖直驱动气缸850驱动下料竖直升降座840沿竖直方向往复升降,这样,下料磁铁块860便可以在水平方向和竖直方向两个自由度上运动,从而实现将下料流水线700尾端的多个电子元器件10吸取并移送至下一个工位。
本发明的电子元器件点焊设备20,通过设置电子元器件上料定距机构21及与电子元器件上料定距机构21配合的电子元器件点焊机构22,电子元器件上料定距机构21用于对电子元器件10进行自动化上料,在实现对电子元器件10进行自动化上料的基础上,还实现将多个电子元器件10彼此相互间隔开来,以便于后续的点焊机构对电子元器件10进行点焊操作;电子元器件点焊机构22用于对电子元器件10的四个侧面都进行点焊处理,每一侧面进行一次点焊。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
电子元器件上料定距机构及其电子元器件点焊设备专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0