







专利摘要
本发明公开了一种具有高稳定性的航标,包括航标主体与驱动机构;所述航标主体外表面设置有转动块,所述转动块与航标主体活动连接,所述驱动机构通过转动块与航标主体连接,所述转动块与航标主体同轴设置,所述转动块能够以航标主体为轴进行转动,所述转动块的质量密度分布均匀。本发明提高了航标在水中的稳定性,使航标在水中的位置不会发生改变,能够准确对来往船舶起到警示作用,避免事故的发生。
权利要求
1.一种具有高稳定性的航标,其特征在于:包括航标主体与驱动机构;所述航标主体外表面设置有转动块,所述转动块与航标主体活动连接,所述驱动机构通过转动块与航标主体连接,所述转动块与航标主体同轴设置,所述转动块能够以航标主体为轴进行转动,所述转动块的质量密度分布均匀;
所述航标主体外表面设置有圆形槽,所述转动块内壁设置有与圆形槽相配合的凸出块;
所述驱动机构包括驱动电机与齿轮传动机构;所述驱动电机的转轴端通过齿轮传动机构与转动块连接;
所述齿轮传动机构包括主动齿轮、从动齿轮与传送带;所述主动齿轮位于驱动电机的转轴端,所述从动齿轮位于转动块外表面,所述主动齿轮与从动齿轮之间通过传送带连接。
2.根据权利要求1所述的一种具有高稳定性的航标,其特征在于:所述传送带与驱动电机同侧设置有支撑架,所述支撑架与传送带连接且不影响传送带正常使用。
3.根据权利要求2所述的一种具有高稳定性的航标,其特征在于:所述支撑架上设置有振动传感器与电源,所述电源与驱动电机电性连接。
4.根据权利要求1所述的一种具有高稳定性的航标,其特征在于:还包括密封盒,所述航标主体一部分位于密封盒内,另一部分位于密封盒外,所述驱动机构与转动块均位于密封盒内。
5.根据权利要求4所述的一种具有高稳定性的航标,其特征在于:所述航标主体底端设置有位于密封盒内的配重基台。
6.根据权利要求1所述的一种具有高稳定性的航标,其特征在于:所述航标主体与转动块均为圆柱形结构体。
说明书
技术领域
本发明属于航标技术领域,尤其涉及一种具有高稳定性的航标。
背景技术
航标是航行标志的简称,指标示航道方向、界限与碍航物的标志,包括过河标、沿岸标、导标、过渡导标、首尾导标、侧面标、左右通航标、示位标、泛滥标和桥涵标等。是帮助引导船舶航行、定位和标示碍航物与表示警告的人工标志。
传统航标直接放置在水中,对来往的船舶起到警告作用,当处于大风天气时,航标在水中容易晃动,极其不稳定,位置容易发生改变,当航标位置发生改变后,航标则无法准确对来往船舶起到警示作用,容易导致事故的发生。
发明内容
本发明克服了现有技术的不足,提供一种具有高稳定性的航标,使航标在水中的位置不会发生改变,能够准确对来往船舶起到警示作用,避免事故的发生。
为达到上述目的,本发明采用的技术方案为:一种具有高稳定性的航标,包括航标主体与驱动机构;所述航标主体外表面设置有转动块,所述转动块与航标主体活动连接,所述驱动机构通过转动块与航标主体连接,所述转动块与航标主体同轴设置,所述转动块能够以航标主体为轴进行转动,所述转动块的质量密度分布均匀。
本发明一个较佳实施例中,所述驱动机构包括驱动电机与齿轮传动机构;所述驱动电机的转轴端通过齿轮传动机构与转动块连接。
本发明一个较佳实施例中,所述齿轮传动机构包括主动齿轮、从动齿轮与传送带;所述主动齿轮位于驱动电机的转轴端,所述从动齿轮位于转动块外表面,所述主动齿轮与从动齿轮之间通过传送带连接。
本发明一个较佳实施例中,所述传送带与驱动电机同侧设置有支撑架,所述支撑架与传送带连接且不影响传送带正常使用。
本发明一个较佳实施例中,所述支撑架上设置有振动传感器与电源,所述电源与驱动电机电性连接。
本发明一个较佳实施例中,还包括密封盒,所述航标主体一部分位于密封盒内,另一部分位于密封盒外,所述驱动机构与转动块均位于密封盒内。
本发明一个较佳实施例中,所述航标主体底端设置有位于密封盒内的配重基台。
本发明一个较佳实施例中,所述航标主体与转动块均为圆柱形结构体。
本发明一个较佳实施例中,所述航标主体外表面设置有圆形槽,所述转动块内壁设置有与圆形槽相配合的凸出块。
本发明解决了背景技术中存在的缺陷,本发明具备以下有益效果:
(1)当航标主体处于不稳定状态时,航标主体具有偏离自身轴心线的趋势,高速转动过程中的转动块具有高稳定性,并且转动块在高速转动过程中一直与航标主体保持活动连接,故而转动块降低了航标主体偏离自身轴心线的趋势,从而提高了航标主体的稳定性;
(2)通过驱动机构带动转动块进行转动,不会影响航标主体本身具有的稳定性;
(3)采用振动传感器监测航标主体的振动状态,方便快捷,并且能够精确的监测到航标主体振动的幅度;
(4)转动块与航标主体采用同轴设置,保证转动块在高速转动过程中相对航标主体的位置不会发生偏移,从而能够准确提高航标主体的稳定性;
(5)采用凸出块配合圆形槽,使转动块在高速转动过程中一直与航标主体保持活动连接,进而保证转动块能够顺利降低航标主体偏离自身轴心的趋势,从而提高了航标主体的稳定性;
(6)配重基台的使用,使航标主体具有足够大的重量,从而使其本身具有高稳定性;
(7)使用透明密封盒,在不干涉振动传感器对航标主体监测的同时,密封盒的使用对盒内的物体起到防水作用。
附图说明
下面结合附图和实施例对本发明进一步说明;
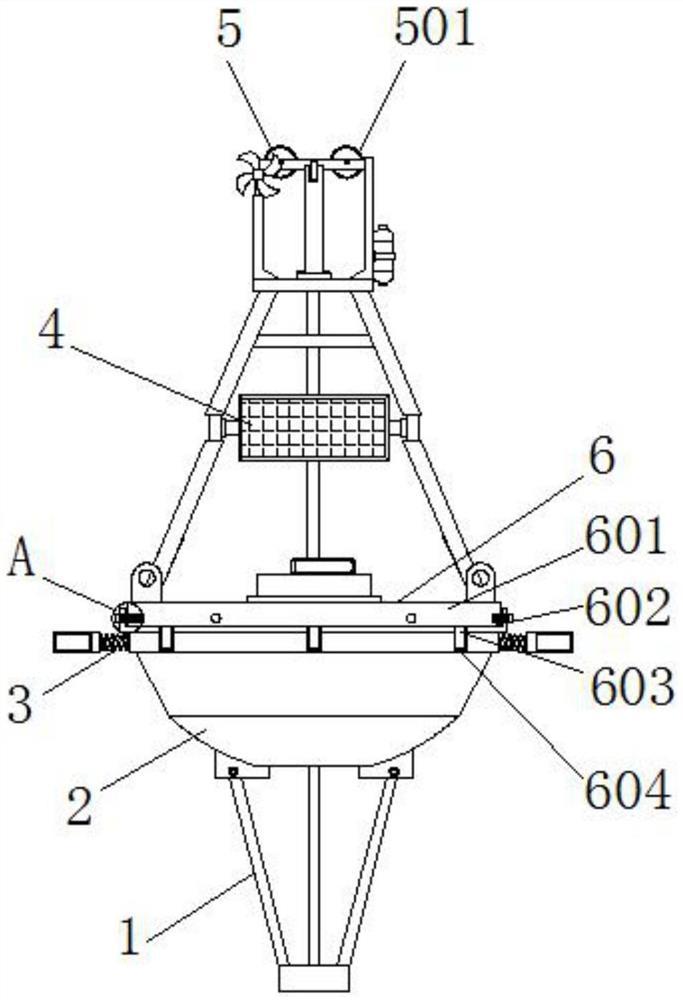
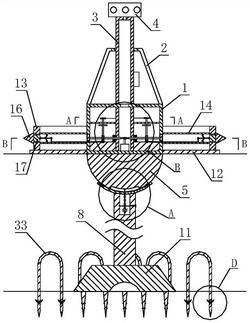
图1为本发明的优选实施例的轴测图;
图2为图1中去除密封盒的结构示意图;
图3为图2的俯视图;
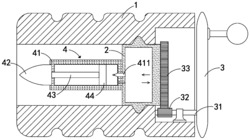
图4为图1的剖视图;
图5为图4中A部放大图;
图中:1、航标主体;101、圆形槽;2、转动块;201、凸出块;3、驱动电机;4、主动齿轮;5、从动齿轮;6、传送带;7、支撑架;8、振动传感器;9、电源;10、配重基台;11、密封盒。
具体实施方式
现在结合附图和实施例对本发明作进一步详细的说明,这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
如图1、图2和图3所示,一种具有高稳定性的航标,包括航标主体1与驱动机构;航标主体1外表面设置有转动块2,转动块2为一质量大、密度大的筒状物体,转动块2与航标主体1活动连接,由于转动块2在高速转动状态下具有高稳定性,与此同时转动块2一直与航标主体1活动连接,故而当航标主体1稳定性较差时,航标主体1具有偏离自身轴心线的趋势,此时由于处于高速转动过程中的转动块2具有高稳定性,故而转动块2降低了航标主体1偏离自身轴心线的趋势,从而提高了航标主体1的稳定性,驱动机构通过转动块2与航标主体1连接,驱动机构用于对转动块2进行驱动,当航标主体1处于不稳状态时,驱动转动块2进行高速旋转,转动块2与航标主体1同轴设置,采用同轴设置,保证转动块2在高速转动过程中相对航标主体1的位置不会发生偏移,从而能够准确提高航标主体1的稳定性,转动块2能够以航标主体1为轴进行转动,转动块2的质量密度分布均匀,采用质量密度分布均匀的转动块2,防止转动块2因质量分布不均发生转动偏移的现象。
具体而言,驱动机构包括驱动电机3与齿轮传动机构;驱动电机3的转轴端通过齿轮传动机构与转动块2连接,驱动电机3通过齿轮传动机构驱动转动块2进行高速旋转。
具体地,齿轮传动机构包括主动齿轮4、从动齿轮5与传送带6;主动齿轮4位于驱动电机3的转轴端,从动齿轮5位于转动块2外表面,主动齿轮4与从动齿轮5之间通过传送带6连接,当驱动电机3开始工作时,主动齿轮4通过传送带6带动从动齿轮5进行转动,进而带动转动块2进行高速旋转。
如图2所示,根据本发明的一个实施例,传送带6与驱动电机3同侧设置有支撑架7,支撑架7与传送带6连接且不影响传送带正常使用,支撑架7对传送带6起到支撑作用,避免齿轮传动机构在传动过程中发生故障。
具体地,支撑架7上设置有振动传感器8与电源9,电源9与驱动电机3电性连接,振动传感器8用于监测航标主体1的振动状态,本发明中振动传感器8为电涡流传感器,型号为HZ-891,当航标主体1的振动幅度到达某个临界点时,振动传感器8将信号反馈至控制系统,控制系统接收信号之后,控制电源10开始工作,启动驱动电机3,通过齿轮传动机构带动转动块2进行高速转动,进而稳定提高航标主体1的稳定性。
如图4所示,在本发明的一些具体实施方式中,还包括密封盒11,航标主体1一部分位于密封盒11内,另一部分位于密封盒11外,驱动机构与转动块2均位于密封盒11内,由于本发明的使用方向为水中的航标,故而需要一个完整的密封盒11,防止进水使装置遭到破坏,同时密封盒11需要采用透明设计,以保证振动传感器8能够顺利监测航标主体1的振动状态。
具体地,航标主体1底端设置有位于密封盒11内的配重基台10,配重基台10的使用,使航标主体1底部具有足够大的重量,从而使其本身具有一定稳定性。
可选的,航标主体1与转动块2均为圆柱形结构体。
如图5所示,在本发明的一些具体实施方式中,航标主体1外表面设置有圆形槽101,转动块2内壁设置有与圆形槽101相配合的凸出块201,采用凸出块201配合圆形槽101,使转动块2在高速转动过程中一直与航标主体1保持活动连接,进而保证航标主体1的稳定性。
总而言之,本发明当航标主体1处于不稳定状态下,航标主体1具有偏离自身轴心线的趋势,此时,驱动电机3通过齿轮传动机构带动转动块2进行高速、稳定的转动,此时的转动块2具有高稳定性,并且由于转动块2在高速、稳定转动过程中一直与航标主体1保持活动连接,故而能够转动块2能够降低航标主体1偏离自身轴心线的趋势,从而提高航标主体1的稳定性,防止航标主体1因不稳而发生位置改变,避免事故的发生。
以上依据本发明的理想实施例为启示,通过上述的说明内容,相关人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定技术性范围。
一种具有高稳定性的航标专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0