





专利摘要
本发明涉及精密二维运动场合,可用于通用XY运动平台的精密位移补偿,本发明具体涉及基于应力刚化原理的刚度频率可调二维微动平台,包括X向与Y向运动子平台及对应驱动器、微动工作平台,利用通过螺钉调节张紧力的薄膜组作为柔性铰链,实现二维微动平台的振动频率的独立调整。本发明采用上述结构,基于预应力膜,频率可调,能根据不同的工况和驱动频率,可在工作前或工作过程中调节微动平台的固有频率,两个进给运动方向正交,避免微动工作台在二维运动时发生耦合。
权利要求
1.基于应力刚化原理的刚度频率可调二维微动平台,其特征在于:包括有X向薄膜组(201)、Y向薄膜组(202)、X向运动子平台(203)、Y向运动子平台(204)、外框架(205)、X向驱动、Y向驱动、X向位移传感器(8)、Y向位移传感器(10)、机架(1)和工作平台(5);
所述外框架(205)固定于所述机架(1);具有弹性的所述X向薄膜组(201)设置于所述X向运动子平台(203)的两侧,其一端连接于所述外框架(205)内侧壁,另一端连接于所述X向运动子平台(203);具有弹性的所述Y向薄膜组(202)设置于所述Y向运动子平台(204)的两侧,其一端连接于所述X向运动子平台(203)的内侧壁,另一端连接于所述Y向运动子平台(204);所述X向薄膜组(201)和Y向薄膜组(202)相互垂直;所述工作平台(5)刚性连接于所述Y向运动子平台(204);
所述的X向薄膜组(201)和Y向薄膜组(202)中各自的薄膜均为平行布置,且薄膜的长度方向分别垂直于X向运动子平台(203)和Y向运动子平台(204)的进给方向;
所述X向驱动包括有X向驱动定子(301)和X向驱动动子(302);所述Y向驱动包括有Y向驱动定子(401)和Y向驱动动子(402)。其中所述的X向驱动定子(301)和Y向驱动定子(401)均固定在机架(1)上;所述的X向驱动动子(302)通过固定在X向运动子平台(203)上,所述的Y向驱动动子(402)通过固定在Y向运动子平台(204)上;
所述外框架(205)在其与X向薄膜组(201)的相连接处设置有槽(2),使所述外框架(205)的内侧形成较薄的可变形的X向运动子平台弹性件(6),所述外框架(205)设有调节X向运动子平台弹性件(6)变形度的X向频率调节机构(11);所述Y向运动子平台(204)设有调节与所述Y向薄膜组(202)的连接处为可变形的Y向运动子平台弹性件(9),所述Y向运动子平台(204)设有调节Y向运动子平台弹性件(9)的Y向频率调节机构(7)。
2.根据权利要求1所述的基于应力刚化原理的刚度频率可调二维微动平台,其特征在于:在所述X向运动子平台(203)和所述Y向运动子平台(204)的进给方向的端部分别设置有X向位移传感器(8)和Y向位移传感器(10)。
3.根据权利要求2所述的基于应力刚化原理的刚度频率可调二维微动平台,其特征在于:所述X向位移传感器(8)和Y向位移传感器(10)为电容式或电感式传感器
4.根据权利要求2所述的基于应力刚化原理的刚度频率可调二维微动平台,其特征在于:在所述X向位移传感器(8)和Y向位移传感器(10)的非工作面设置有绝缘层。
5.根据权利要求1所述的基于应力刚化原理的刚度频率可调二维微动平台,其特征在于:所述X向薄膜组(201)、Y向薄膜组(202)、X向运动子平台(203)、Y向运动子平台(204)和外框架(205)为一体式结构。
6.根据权利要求1所述的基于应力刚化原理的刚度频率可调二维微动平台,其特征在于:所述Y向运动子平台(204)在其内侧转角处设置有圆弧形内嵌式孔槽(206)。
7.根据权利要求1所述的基于应力刚化原理的刚度频率可调二维微动平台,其特征在于:所述X向音圈电机的磁性定子(301)和线圈动子(302)在图示Y向留有运动间隙,所述Y向音圈电机的磁性定子(401)和线圈动子(402)在图示X向留有运动间隙。通过所述方式,驱动机构实现XY向运动解耦。
8.根据权利要求1所述的基于应力刚化原理的刚度频率可调二维微动平台,其特征在于:所述X向驱动器(401)和所述Y向驱动器(402)为音圈电机。
9.根据权利要求1所述的基于应力刚化原理的刚度频率可调二维微动平台,其特征在于:所述X向频率调节机构(11)为穿过所述槽(2)的螺栓,其两端分别连接于所述槽(2)的两侧;所述Y向频率调节机构(7)为穿过所述Y向运动子平台(204)并连接于所述工作平台(5)的螺栓。
10.根据权利要求1所述的基于应力刚化原理的刚度频率可调二维微动平台,其特征在于:所述X向频率调节机构(11)为穿过所述槽(2)的压电陶瓷驱动器,其两端分别连接于所述槽(2)的两侧;所述Y向频率调节机构(7)为穿过所述Y向运动子平台(204)并连接于所述工作平台(5)的压电陶瓷驱动器。
说明书
技术领域
本发明涉及精密运动平台,可用于精密操作和宏微复合高速精密补偿,本发明具体涉及基于应力刚化原理的刚度频率可调二维微动平台。
背景技术
为了实现二维精密运动,精确、稳定的进给机构显得尤为重要,因为它与产品的质量密切相关。另外,复杂光学自由曲面由于体积小,高精度更是对微进给机构提出了严格的要求。微进给系统是加工此类产品的基础,其广泛应用于快刀伺服进给系统,微动工作台和宏微复合平台等中。传统的二维微进给装置通常采用固定频率设计,对材料特性和制造误差提出了极高的要求,尤其在加工不同产品时,其驱动频率通常会变化,使得固定频率的运动平台位移放大因子不一致,从而使得位移放大失真。此外,现有的基于柔性铰链的二维微动平台运动耦合,运动控制复杂,难于满足高速精密运动需求。
发明内容
本发明的目的在于提出基于应力刚化原理的刚度频率可调二维微动平台,基于预应力膜,频率可调,两个进给装置的驱动方向相互垂直,避免微动工作台在二维运动时发生耦合。
为达此目的,本发明采用以下技术方案:
基于应力刚化原理的刚度频率可调二维微动平台,包括有X向薄膜组(201)、Y向薄膜组(202)、X向运动子平台(203)、Y向运动子平台(204)、外框架(205)、X向驱动、Y向驱动、X向位移传感器(8)、Y向位移传感器(10)、机架(1)和工作平台(5);
所述外框架(205)固定于所述机架(1);具有弹性的所述X向薄膜组(201)设置于所述X向运动子平台(203)的两侧,其一端连接于所述外框架(205)内侧壁,另一端连接于所述X向运动子平台(203);具有弹性的所述Y向薄膜组(202)设置于所述Y向运动子平台(204)的两侧,其一端连接于所述X向运动子平台(203)的内侧壁,另一端连接于所述Y向运动子平台(204);所述X向薄膜组(201)和Y向薄膜组(202)相互垂直;所述工作平台(5)刚性连接于所述Y向运动子平台(204);
所述的X向薄膜组(201)和Y向薄膜组(202)中各自的薄膜均为平行布置,且薄膜的长度方向分别垂直于X向运动子平台(203)和Y向运动子平台(204)的进给方向;
所述X向驱动包括有X向驱动定子(301)和X向驱动动子(302);所述Y向驱动包括有Y向驱动定子(401)和Y向驱动动子(402)。其中所述的X向驱动定子(301)和Y向驱动定子(401)均固定在机架(1)上;所述的X向驱动动子(302)通过固定在X向运动子平台(203)上,所述的Y向驱动动子(402)通过固定在Y向运动子平台(204)上;
所述外框架(205)在其与X向薄膜组(201)的相连接处设置有槽(2),使所述外框架(205)的内侧形成较薄的可变形的X向运动子平台弹性件(6),所述外框架(205)设有调节X向运动子平台弹性件(6)变形度的X向频率调节机构(11);所述Y向运动子平台(204)设有调节与所述Y向薄膜组(202)的连接处为可变形的Y向运动子平台弹性件(9),所述Y向运动子平台(204)设有调节Y向运动子平台弹性件(9)的Y向频率调节机构(7)。
在所述X向运动子平台(203)和所述Y向运动子平台(204)的进给方向的端部分别设置有X向位移传感器(8)和Y向位移传感器(10)。
所述X向位移传感器(8)和Y向位移传感器(10)为电容式或电感式传感器
在所述X向位移传感器(8)和Y向位移传感器(10)的非工作面设置有绝缘层。
所述X向薄膜组(201)、Y向薄膜组(202)、X向运动子平台(203)、Y向运动子平台(204)和外框架(205)为一体式结构。
所述Y向运动子平台(204)在其内侧转角处设置有圆弧形内嵌式孔槽(206)。
所述X向音圈电机的磁性定子(301)和线圈动子(302)在图示Y向留有运动间隙,所述Y向音圈电机的磁性定子(401)和线圈动子(402)在图示X向留有运动间隙。通过所述方式,驱动机构实现XY向运动解耦。
所述X向驱动器(401)和所述Y向驱动器(402)为音圈电机。
所述X向频率调节机构(11)为穿过所述槽(2)的螺栓,其两端分别连接于所述槽(2)的两侧;所述Y向频率调节机构(7)为穿过所述Y向运动子平台(204)并连接于所述工作平台(5)的螺栓。
所述X向频率调节机构(11)为穿过所述槽(2)的压电陶瓷驱动器,其两端分别连接于所述槽(2)的两侧;所述Y向频率调节机构(7)为穿过所述Y向运动子平台(204)并连接于所述工作平台(5)的压电陶瓷驱动器。
本发明所提出的微动平台频率调节的技术原理为:预应力膜所构成的柔顺机构的固有频率与预应力膜的张力相关,通过调节预应力膜内的张紧力来调节机构的固有频率,满足不同工况的要求。
由于采用上述技术方案,本发明提出的频率调节二维微动平台具有以下优点:
1.采用了基于调节预应力膜张紧力来改变机构固有频率的的设计方案,可以手动或动态的调整机构的运动特性,改善并提高微动平台的性能。
2.本发明所提出的二维微动平台中驱动器的大质量的定子都固定在机架上,减小了二维微动平台的运动惯性,有利于提高微动平台的响应速度。
3.本发明所提出的二维微动平台采用一体式柔顺机构来实现XY平面内二维位移,X向运动平台和Y向运动平台之间没有运动副间隙,可以适应高执行频率的工作环境。
4.本发明所提出的二维微动平台的X向运动方向与Y向运动方向相互垂直,运动控制简单。
附图说明
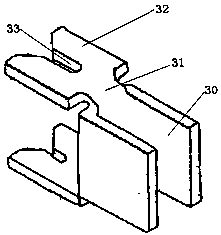
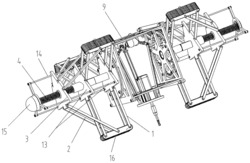
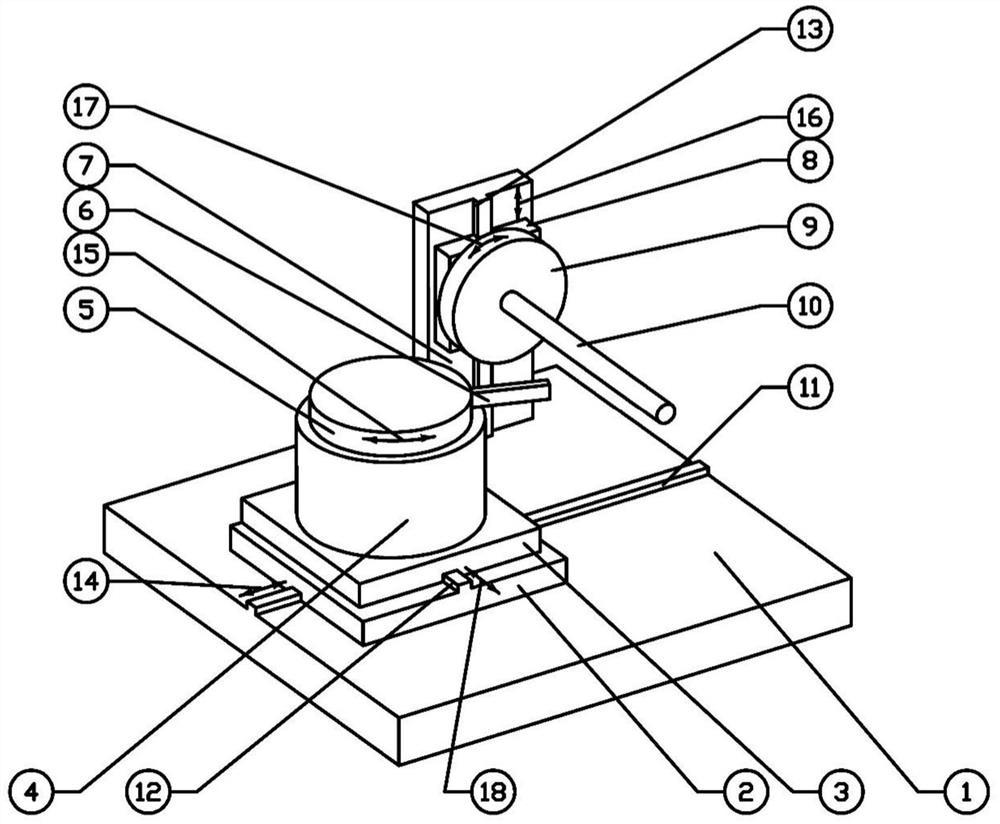
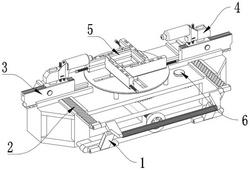
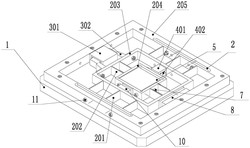
图1是本发明一种实例的结构轴测示意图
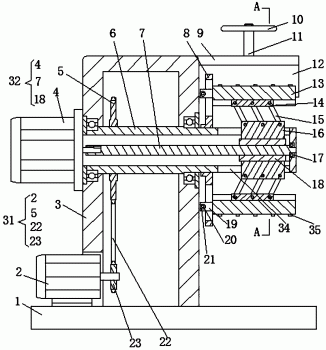
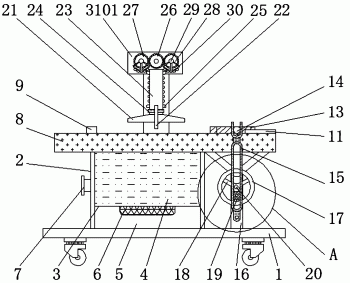
图2是本发明的一种实例的正视图
图3是本发明的一维微动平台的薄膜组、运动子平台和外框架的一体式结构示意图
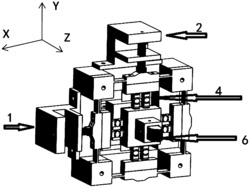
图4是本发明的另一种实例的结构轴测示意图
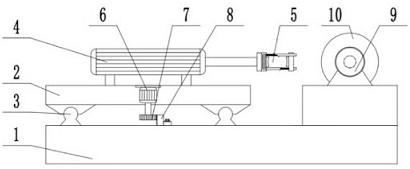
图5是本发明的另一种实例的正视图。
其中:机架1,槽2,X向薄膜组201,Y向薄膜组202,X向运动子平台203,Y向运动子平台204,外框架205,内嵌式孔槽206,X向驱动定子301,X向驱动动子302,Y向驱动定子401,Y向驱动动子402,工作平台5,X向运动子平台弹性件6,Y向频率调节机构7,X向位移传感器8,Y向运动子平台弹性件9,Y向位移传感器10,X向频率调节机构11,Y向压电陶瓷片12,X向压电陶瓷片13。
具体实施方式
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
如图1至图3所示的基于应力刚化原理的刚度频率可调二维微动平台,包括有X向薄膜组201、Y向薄膜组202、X向运动子平台203、Y向运动子平台204、外框架205、X向驱动、Y向驱动、X向位移传感器8、Y向位移传感器10、机架1和工作平台5;
所述外框架205固定于所述机架1;具有弹性的所述X向薄膜组201设置于所述X向运动子平台203的两侧,其一端连接于所述外框架205内侧壁,另一端连接于所述X向运动子平台203;具有弹性的所述Y向薄膜组202设置于所述Y向运动子平台204的两侧,其一端连接于所述X向运动子平台203的内侧壁,另一端连接于所述Y向运动子平台204;所述X向薄膜组201和Y向薄膜组202相互垂直;所述工作平台5刚性连接于所述Y向运动子平台204;
所述的X向薄膜组201和Y向薄膜组202中各自的薄膜均为平行布置,且薄膜的长度方向分别垂直于X向运动子平台203和Y向运动子平台204的进给方向;
所述X向驱动包括有X向驱动定子301和X向驱动动子302;所述Y向驱动包括有Y向驱动定子401和Y向驱动动子402。其中所述的X向驱动定子301和Y向驱动定子401均固定在机架1上;所述的X向驱动动子302通过固定在X向运动子平台203上,所述的Y向驱动动子402通过固定在Y向运动子平台204上;所述X向驱动用来驱动X向运动子平台203的X向运动,所述Y向驱动用来驱动Y向运动子平台204的Y向运动;
如图3所示,所述外框架205在其与X向薄膜组201的相连接处设置有槽2,使所述外框架205的内侧形成较薄的可变形的X向运动子平台弹性件6,所述外框架205设有调节X向运动子平台弹性件6变形度的X向频率调节机构11;所述Y向运动子平台204设有调节与所述Y向薄膜组202的连接处为可变形的Y向运动子平台弹性件9,所述Y向运动子平台204设有调节Y向运动子平台弹性件9的Y向频率调节机构7。
所述X向驱动器驱动所述X向运动子平台203及与其连接的Y向运动子平台204和工作平台5产生X向微位移进给。在所述X向薄膜组201的牵制作用下,所述X向运动子平台203在非X进给方向的运动被抑制。
所述Y向驱动所述Y向运动子平台204及与其连接的工作平台5产生Y向微位移进给。在所述Y向薄膜组202的牵制作用下,所述Y向运动子平台204在非Y进给方向的运动被抑制。
所述工作平台安装有刀具等功能组件,在所述所述X向驱动器和所述Y向驱动器作用下产生二维位移,完成相应的工艺动作。
通过改变所述X向频率调节机构11和Y向频率调节机构7的松紧程度可以改变上述机构的固有频率,从而改变所述工作平台5运动特性。
所述的X向驱动定子301和Y向驱动定子401均固定在机架1,质量轻,振动动能小,频率快。
如图1所示,在所述X向运动子平台203和所述Y向运动子平台204的进给方向的端部分别设置有X向位移传感器8和Y向位移传感器10,用于探测工作平台5的X向和Y向的微位移。
所述X向位移传感器8和Y向位移传感器10为电容式或电感式传感器
在所述X向位移传感器8和Y向位移传感器10的非工作面设置有绝缘层,用于防止位移传感器被其他金属材料干扰,影响测量精度。
所述X向薄膜组201、Y向薄膜组202、X向运动子平台203、Y向运动子平台204和外框架205为一体式结构,由整块材料经过铣削、电火花加工等方式获取,避免了零件的装配误差,可以提高平台运动精度。
如图3所示,所述Y向运动子平台204在其内侧转角处设置有圆弧形内嵌式孔槽206。上述孔槽206设置目的在于保证本发明中的频率调节装置可以较好地调节X向薄膜组201和Y向薄膜组202的薄膜张紧力。
所述X向音圈电机的磁性定子301和线圈动子302在图示Y向留有运动间隙,所述Y向音圈电机的磁性定子401和线圈动子402在图示X向留有运动间隙。通过所述方式,驱动机构实现XY向运动解耦。
所述X向驱动器401和所述Y向驱动器402为音圈电机。
所述X向频率调节机构11为穿过所述槽2的螺栓,其两端分别连接于所述槽2的两侧;所述Y向频率调节机构7为穿过所述Y向运动子平台204并连接于所述工作平台5的螺栓。
如图1至图3所示,所述X向频率调节机构11和Y向频率调节机构7为螺栓,所述螺栓可手动调节长度方向产生位移,可分别改变所述X向运动子平台弹性件6和Y向运动子平台弹性件9的松紧度,进而分别改变所述X向薄膜组201和Y向薄膜组202的薄膜张紧力,实现对平台的结构固有频率的动态调整。
所述X向频率调节机构11为穿过所述槽2的压电陶瓷驱动器,其两端分别连接于所述槽2的两侧;所述Y向频率调节机构7为穿过所述Y向运动子平台204并连接于所述工作平台5的压电陶瓷驱动器。
如图3至图5所示,所述X向频率调节机构11包括螺栓和X向压电陶瓷片13,所述Y向频率调节机构7包括螺栓和Y向压电陶瓷片12。所述X向压电陶瓷片13和所述Y向压电陶瓷片12在外加电压作用下可控制螺栓的长度方向产生位移,可分别改变所述X向运动子平台弹性件6和Y向运动子平台弹性件9的松紧度,进而分别改变所述X向薄膜组201和Y向薄膜组202的薄膜张紧力,实现对平台的结构固有频率的动态调整。
以上结合具体实施例描述了本发明的技术原理。这些描述只是为了解释本发明的原理,而不能以任何方式解释为对本发明保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些方式都将落入本发明的保护范围之内。
基于应力刚化原理的刚度频率可调二维微动平台专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0