

IPC分类号 : H02K1/27I,H02K5/16I,H02K11/21I,H02P23/14I,H02P23/18I



![2-[4-(苯并噁唑-2-氧基)苯氧基]脂肪酰吡啶胺的医药用途](https://www.zhichawang.com/images/faming.png)



专利摘要
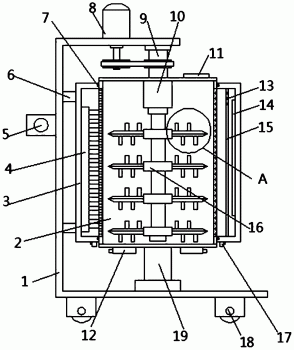
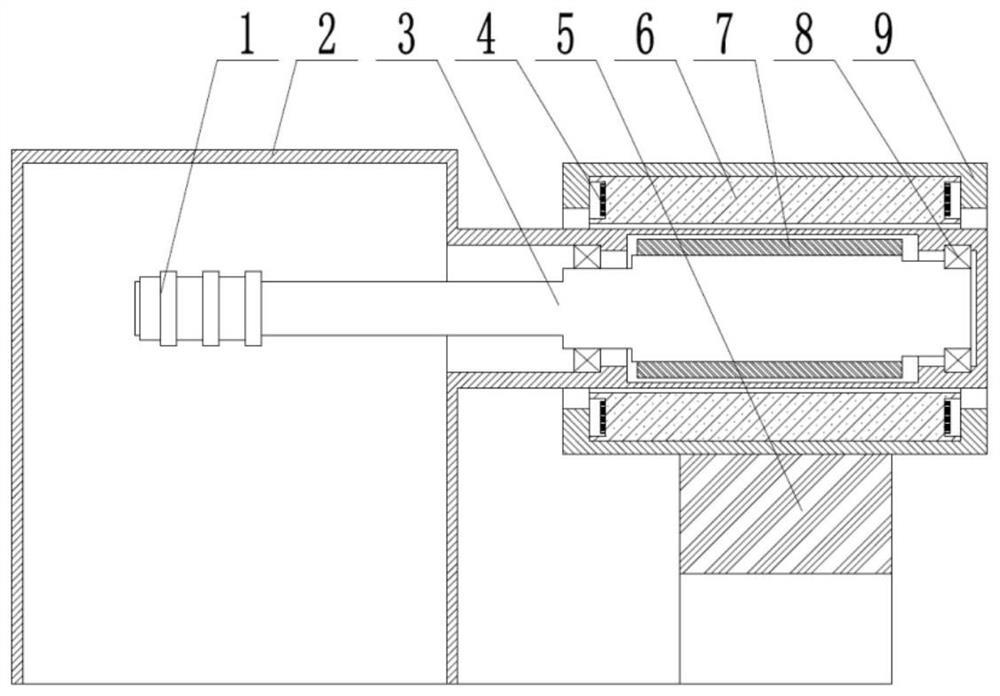
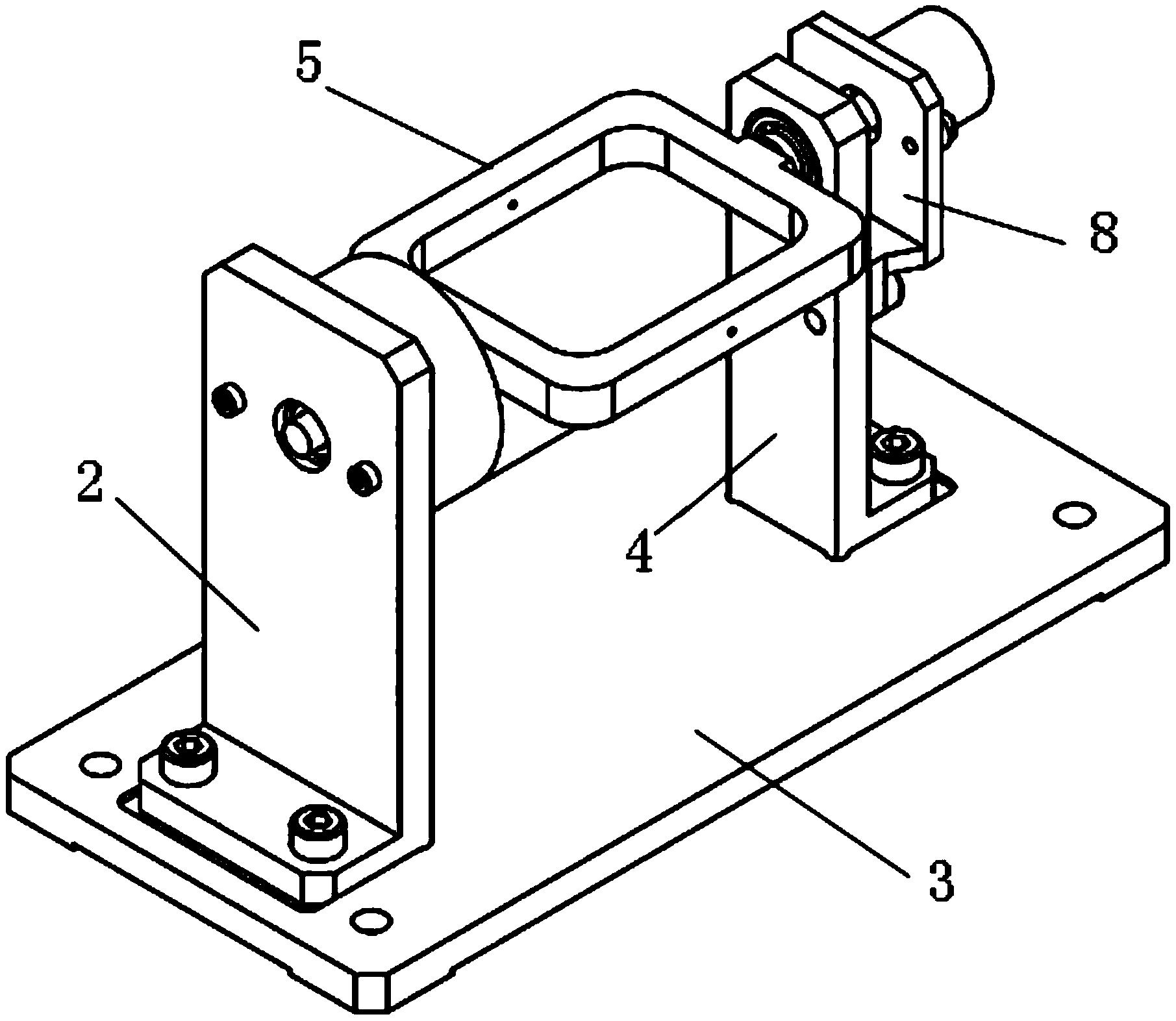
本发明涉及一种刚柔耦合高精度振镜电机及其控制方法,其中所述刚柔耦合高精度振镜电机包括:定子、相对于所述定子转动的转子、轴承座和至少两组编码器;转子转轴上安装有所述刚柔耦合轴承;所述刚柔耦合轴承包括:刚性轴承和能够发生弹性形变的柔性铰链环,所述柔性铰链环被固定在所述刚性轴承的内圈内;所述至少两组编码器包括:第一组编码器和第二组编码器;所述第一组编码器用于测量所述转轴的旋转角度;所述第二组编码器用于测量所述刚性轴承的内圈的旋转角度。本发明利用柔性铰链环的弹性变形来克服摩擦死区,降低扰动带宽,并通过两组编码器对电机运动进行监控,提高了控制精度。
权利要求
1.一种用于控制刚柔耦合高精度振镜电机的方法,其特征在于,
所述刚柔耦合高精度振镜电机包括:定子、相对于所述定子转动的转子、轴承座和至少两组编码器;
所述转子包括:转轴、刚柔耦合轴承和多个磁铁;
所述多个磁铁极性交替地粘贴在所述转轴上;
所述转轴上安装有所述刚柔耦合轴承;
所述轴承座通过所述刚柔耦合轴承将所述转子定位在所述定子中;
所述刚柔耦合轴承包括:刚性轴承和能够发生弹性形变的柔性铰链环,所述柔性铰链环被固定在所述刚性轴承的内圈内;
所述至少两组编码器包括:第一组编码器和第二组编码器;
所述第一组编码器用于测量所述转轴的旋转角度;
所述第二组编码器用于测量所述刚性轴承的内圈的旋转角度;
所述方法包括以下步骤:
步骤1,以最大转矩减去最大扰动量的差值除以转轴的等效惯量,得到最大角加速度,以所述最大角加速度作为约束,进行运动规划,得到运动规划的角位移、角速度和角加速度;
步骤2,以运动规划的角位移和角速度为参考输入,以振镜电机转轴的角位移和角速度作为反馈,所述振镜电机的定子和转子共同组成驱动执行器,建立所述振镜电机的闭环控制系统;
步骤3,检测刚性轴承内圈的角位移和角速度并分别与所述振镜电机转轴的角位移和角速度作差,得到两者之间的角位移差和角速度差;
步骤4,将步骤2得到的振镜电机转轴的角位移和角速度与运动规划的角位移和角速度作差,输入到pd控制器,对角位移差进行比例增益放大,再对角位置差进行微分计算后乘以比例增益,得到振镜电机转轴的控制量;
步骤5,将步骤3得到的角位移差和角速度差分别乘以柔性铰链片组的刚度和阻尼,将两者相加,得到柔性铰链片组量测扰动力;
步骤6,将步骤4得到的控制量进行以柔性铰链片组固有频率为中心频率进行陷波滤波,再将步骤5得到的柔性铰链片组量测扰动力和运动规划的角加速度前馈信息补偿到控制量中;
步骤7,将步骤5得到的量测扰动力与所述步骤6得到的陷波滤波后的控制量一起输入到扩张状态观测器ESO,估计振镜电机转轴的扰动信息;
步骤8,将步骤7得到的扰动信息的估计值补偿到步骤6得到的控制量中,转变为无扰动的刚体平台控制系统。
2.根据权利要求1所述的方法,其特征在于,最大转矩由振镜电机的力常数乘以有效工作电流求得;
最大扰动量获取方法为:施加一恒定驱动转矩T,测量角加速度曲线,取最小的角加速度值a,通过T-df=Im*a算出最大扰动量df;电机转轴的惯量为Im。
3.根据权利要求2所述的方法,其特征在于,以柔性铰链片组振动频率和阻尼比为参数,对旋转运动曲线参数进行动力学响应优化,避免谐振分量;其中,动力学响应优化步骤如下:
S1、参数化运动规划曲线,并获得参数化的所述运动规划曲线中各角加速度输入信号对应的角位移输出响应在时域上的幅值;
S2、建立优化模型;
S3、根据S2所获的运动规划曲线参数的最优值,获得最优运动规划曲线。
4.根据权利要求1-3任一项所述的方法,其特征在于,对pd控制器输出的控制量进行陷波滤波处理,需要将柔性铰链片组产生的量测扰动力与运动规划的角加速度信息在控制量中进行补偿。
5.根据权利要求1-3任一项所述的方法,其特征在于,所述柔性铰链环包括:柔性铰链环内环、柔性铰链环外环和柔性铰链片组;
所述柔性铰链环内环与所述转轴紧密接触,所述柔性铰链环外环与所述刚性轴承的内圈紧密接触,所述柔性铰链片组在所述柔性铰链环内环与所述柔性铰链环外环之间环型等距分布。
6.根据权利要求5所述的方法,其特征在于,所述刚柔耦合高精度振镜电机还包括:机座和固定在机座上的读数头安装架;
所述第一组编码器包括:第一编码器码盘和与所述第一编码器码盘组合使用的第一编码器读头;
所述第二组编码器包括:第二编码器码盘和与所述第二编码器码盘组合使用的第二编码器读头;
所述第一编码器码盘被固定在所述转轴上;
所述第一编码器读头与所述读数头安装架固定在一起;
所述第二编码器码盘被固定在所述柔性铰链环外环上;
所述第二编码器读头与所述读数头安装架固定在一起。
7.根据权利要求6所述的方法,其特征在于,所述柔性铰链环的材质为铝合金且采用一体式加工制造。
8.根据权利要求1-3任一项所述的方法,其特征在于,所述刚柔耦合高精度振镜电机还包括:振镜镜片和夹套;
所述夹套将所述振镜镜片固定在转轴的一端。
一种刚柔耦合高精度振镜电机及其控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0