






专利摘要
本发明公开了一种智能手表的交互方法,包括以下步骤:S1、基于人体传播振动信号,采集智能手表加速度计和陀螺仪的振动信号;S2、采用异常检测算法识别振动信号;S3、对振动信号进行预处理,采用k近邻算法改进后的算法对振动信号进行进一步的分类识别;S4、分析使用者对结果的反馈,及时矫正以维持稳定的识别精度。还相应公开了其交互系统,包括信号检测模块、识别分类模块、实时反馈模块。通过基于人体传播振动信号把人体部位当作虚拟屏幕,并结合了改进的机器学习算法,实际地拓展了手表的交互手段,提高了用户体验,本发明的交互手段新颖有趣,能够切实满足用户需求,可广的应用于文本输入、手表游戏等。
权利要求
1.一种智能手表的交互方法,其特征在于,包括以下步骤:
S1、基于人体传播振动信号,采集智能手表加速度计和陀螺仪的X、Y、Z三轴振动信号;
S2、采用异常检测算法识别振动信号;
S3、对振动信号进行预处理,采用k近邻算法改进后的算法利用经训练的模型对振动信号进行进一步的分类识别;
S4、分析使用者对分类识别结果是否进行纠正的反馈来矫正所述模型在训练阶段使用的训练样本,以维持稳定的识别精度;
其中,所述K近邻 算法改进后的算法为:基于动态时间规整算法,将实际信号与训练信号进行以帧为单位的匹配,计算出实际信号和训练信号之间的最短曼哈顿距离,并以所获得的最短曼哈顿距离作为k近邻算法进行分类识别的依据;
其中,步骤S2利用异常检测算法识别振动信号包括:
S21、采集加速度计Z轴数据;
S22、采用高通滤波器对所述加速度计Z轴数据进行滤波;
S23、设置有效敲击信号的阈值及噪音信号阈值;
S24、读取一段振幅小于噪音信号阈值信号作为第一状态;
S25、继续监听,等待读取振幅大于有效敲击信号阈值的信号,计振幅大于有效敲击信号阈值的位置为x,设置信号的起始位置为位置X前L的位置,即X-L;
S26、继续监听,等待读取一段连续且振幅小于噪音信号阈值的信号,当出现连续振幅小于噪音信号阈值时,设置信号的结束位置为当前位置;
S27、通过信号起止位置获取信号数据,判断信号长度是否满足长度区间,如不满足则回到S25,如满足则进入下一步;
S28、对数据进行高通滤波,分别计算滤波后信号前m个点的能量及m个点之后的能量,判断信号是否大于信噪比阈值,大于则判断信号为有效信号,否则认为是噪音信号,返回到S25。
2.根据权利要求1所述的智能手表的交互方法,其特征在于,步骤S3具体为:
S31、对信号进行归一化的预处理,将信号减去均值并除以方差;
S32、在初始化训练模型阶段,将步骤S31处理后的数据作为训练样本存储到数据库中;在实际使用阶段,使用基于k近邻算法改进后的算法对信号进行分类与识别。
3.根据权利要求1所述的智能手表的交互方法,其特征在于,步骤S4包括:
S41、由步骤S3得到的分类结果集合后,纠正使用者输入结果;
S42、纠正后,对训练样本进行一定程度的修正,从而保持精度的稳定。
4.根据权利要求3中所述的智能手表的交互方法,其特征在于,步骤S41中通过提供候选键或通过在输入法的联想结果对于实际输入进行纠正。
5.根据权利要求4中所述的智能手表的交互方法,其特征在于,步骤S42具体为:
S421、纠正结果与分类结果一致,无操作;
S422、纠正结果与分类结果不一致时,对于训练样本中与分类结果相同类别的样本,删除通过K近邻 算法改进后的算法计算得到的距离最大的样本,再将当前的样本替换至被删除样本的位置。
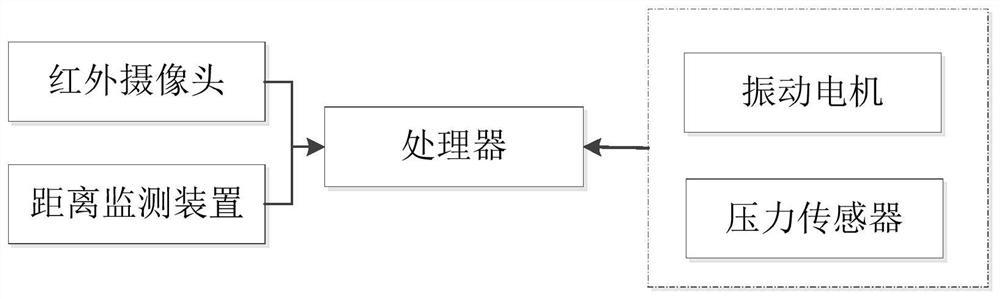
6.一种智能手表的交互系统,其特征在于,包括:
信号检测模块,基于人体传播振动信号,采集智能手表加速度计和陀螺仪的X、Y、Z三轴振动信号;
识别分类模块,采用异常检测算法识别振动信号;对振动信号进行预处理,采用k近邻算法改进后的算法利用经训练的模型对振动信号进行进一步的分类识别;
实时反馈模块,分析使用者对分类识别结果是否进行纠正的反馈来矫正所述模型在训练阶段使用的训练样本,以维持稳定的识别精度;
其中,所述K近邻 算法改进后的算法为:基于动态时间规整算法,将实际信号与训练信号进行以帧为单位的匹配,计算出实际信号和训练信号之间的最短曼哈顿距离,并以所获得的最短曼哈顿距离作为k近邻算法进行分类识别的依据;
其中所述采用异常检测算法识别振动信号包括:
S21、采集加速度计Z轴数据;
S22、采用高通滤波器对所述加速度计Z轴数据进行滤波;
S23、设置有效敲击信号的阈值及噪音信号阈值;
S24、读取一段振幅小于噪音信号阈值信号作为第一状态;
S25、继续监听,等待读取振幅大于有效敲击信号阈值的信号,计振幅大于有效敲击信号阈值的位置为x,设置信号的起始位置为位置X前L的位置,即X-L;
S26、继续监听,等待读取一段连续且振幅小于噪音信号阈值的信号,当出现连续振幅小于噪音信号阈值时,设置信号的结束位置为当前位置;
S27、通过信号起止位置获取信号数据,判断信号长度是否满足长度区间,如不满足则回到S25,如满足则进入下一步;
S28、对数据进行高通滤波,分别计算滤波后信号前m个点的能量及m个点之后的能量,判断信号是否大于信噪比阈值,大于则判断信号为有效信号,否则认为是噪音信号,返回到S25。
7.一种计算机可读存储介质,其上存储有计算机程序,用于执行权利要求1-5任一项所述的智能手表的交互方法。
一种智能手表的交互方法及交互系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0