








专利摘要
发明涉及无线信息处理技术,其公开了一种多人协作式楼层定位方法和系统,包括如下步骤:(S1)目标定位单元以及协助单元互相接收彼此的无线信号,收集信号信息,连同惯性传感器采集的信息一并发送到服务器端;(S2)构建楼层定位模型,获取模型数据信息;(S3)计算出楼层定位算法的系统参数,并得到目标定位单元的最终的高度值。本发明的有益效果:本发明基于火灾等恶劣环境和多名定位人员,将目的定位人员与辅助定位人员建立联系,消除目的定位人员的累积误差,从而实现有效的楼层定位的功能,能够极大地保证定位人员的生命安全。
权利要求
1.一种多人协作式楼层定位方法,其特征在于:所述多人协作式楼层定位方法包括如下步骤:
S1、目标定位人员寻找附近携带有定位装置的人员,然后定位人员之间相互通信,并将所获取的数据信息发送到服务器;
S2、服务器利用楼层定位算法,结合目标定位人员和辅助定位人员发送过来的信息,定位出目标定位人员所在的楼层;
S3、自底向上地,服务器定位每一位目标定位人员的位置,当所有人员都已经定位完成,检查定位人员是否出现异常,如果出现异常,马上叫辅助定位人员去指定楼层观察情况,如果没有异常,执行下一步骤;
S4、将目标定位人员发送信号到定位完成视为一个时钟周期,在每个时钟周期里重复步骤S1-S3,直到行动结束。
2.根据权利要求1所述的多人协作式楼层定位方法,其特征在于: 所述步骤S1包括以下步骤:
S11、目标定位人员通过定位装置发送电磁波信号寻找附件的辅助定位人员;
S12、接收到来自目标定位人员的电磁波信号的辅助定位人员,通过随身佩戴装置,发送唯一的MAC地址给服务器;
S13、服务器根据定位装置的历史高度选取3个或者3个以上的辅助定位人员并决定每位定位人员的通讯发生的时间片;
S14、定位人员们的装置按照服务器确定的时间片发送电磁波信号,然后定位人员们将各自收集的包括惯性传感器和电磁波收集的信息发送到服务器。
3.根据权利要求1所述的多人协作式楼层定位方法,其特征在于,所述步骤S2包括以下步骤:
S21、服务器根据定位人员发送的电磁波信号序列根据MAC地址实施数据分割得到子序列,用相位差测距算法计算任意相邻两个定位人员的相对距离,生成一个四面体模型,然后计算该四面体的高;
S22、服务器在根据定位人员发送过来的惯性传感器的信号计算出每位定位人员相对地面的高度差;
S23、服务器根据定位人员的上一个时钟周期确定的高度,结合目标定位人员相对辅助定位人员的垂直距离、辅助定位人员的高度、目标定位人员相对地面的高度,按照一定权重最终确定目标定位人员所在的楼层。
4.根据权利要求1所述的多人协作式楼层定位方法,其特征在于: 所述步骤S3包括以下步骤:
S31、服务器根据定位人员上一个时钟周期所在楼层,按从底层到顶层的顺序,计算出每一个定位人员当前时钟周期的所在楼层;
S32、服务器确定好每一位定位人员所在的楼层后,在每个定位时钟周期下刷新显示每位定位人员所在楼层的应用程序;
S33、定位人员另外带有报警器,如果定位人员30秒静止不动,将会自动报警,另外如果定位人员觉得有危险,也可以手动报警,服务器将收到定位人员的报警信号,然后服务器选择并告知最靠近目标定位人员的辅助定位人员,让其对目标定位人员进行救援。
5.根据权利要求1所述的多人协作式楼层定位方法,其特征在于: 所述服务器根据接收的文件使用电磁波相位差测距算法计算出六条边的长度,即AB、AC、AD、BC、BD、CD;根据欧拉四面体公式,得到该模型的体积V,再利用解三角形的方法计算出底面积S,根据等体积法:V=(1/3)*S*h0得出目标定位人员相对于辅助定位人员的相对垂直距离h0。
6.一种多人协作式楼层定位系统,其特征在于,所述多人协作式楼层定位系统包括:
信息接收模块,用于目标定位人员寻找附近携带有定位装置的人员,然后定位人员之间相互通信,并将所获取的数据信息发送到服务器的信息;
计算目标定位人员楼层位置模块,用于服务器利用楼层定位算法,结合目标定位人员和辅助定位人员发送过来的信息,定位出目标定位人员所在的楼层;
目标定位人员异常判断模块,用于自底向上地,服务器定位每一位目标定位人员的位置,当所有人员都已经定位完成,检查定位人员是否出现异常,如果出现异常,马上叫辅助定位人员去指定楼层观察情况,如果没有异常,执行循环定位模块;
循环定位模块,用于将目标定位人员发送信号到定位完成视为一个时钟周期,在每个时钟周期重复信息接收模块、计算目标定位人员楼层位置模块、目标定位人员异常判断模块,直到行动结束。
7.根据权利要求6所述的多人协作式楼层定位系统,其特征在于,所述信息接收模块中包括:
寻人单元,用于目标定位人员通过定位装置发送电磁波信号寻找附件的辅助定位人员;
MAC地址发送单元,用于接收到来自目标定位人员的电磁波信号的辅助定位人员,通过随身佩戴装置,发送唯一的MAC地址给服务器;
确定时间片单元,用于服务器根据定位装置的历史高度选取3个或者3个以上的辅助定位人员并决定每位定位人员的通讯发生的时间片;
信息发送单元,用于定位人员们的装置按照服务器确定的时间片发送电磁波信号,然后定位人员们将各自收集的包括惯性传感器和电磁波收集的信息发送到服务器。
8.根据权利要求6所述的多人协作式楼层定位系统,其特征在于: 所述计算目标定位人员楼层位置模块包括:
模型构建单元,用于服务器根据定位人员发送的电磁波信号序列根据MAC地址实施数据分割得到子序列,用相位差测距算法计算任意相邻两个定位人员的相对距离,生成一个四面体模型,然后计算该四面体的高;
高度差计算单元,用于服务器在根据定位人员发送过来的惯性传感器的信号计算出每位定位人员相对地面的高度差;
楼层确认单元,用于服务器根据定位人员的上一个时钟周期确定的高度,结合目标定位人员相对辅助定位人员的垂直距离、辅助定位人员的高度、目标定位人员相对地面的高度,按照一定权重最终确定目标定位人员所在的楼层;
所述目标定位人员异常判断模块包括:服务器根据定位人员上一个时钟周期所在楼层,按从底层到顶层的顺序,计算出每一个定位人员当前时钟周期的所在楼层;
程序刷新单元,用于服务器确定好每一位定位人员所在的楼层后,在每个定位时钟周期下刷新显示每位定位人员所在楼层的应用程序;
报警救援单元,用于定位人员另外带有报警器,如果定位人员30秒静止不动,将会自动报警,另外如果定位人员觉得有危险,也可以手动报警,服务器将收到定位人员的报警信号,然后服务器选择并告知最靠近目标定位人员的辅助定位人员,让其对目标定位人员进行救援;
所述服务器根据接收的文件使用电磁波相位差测距算法计算出六条边的长度,即AB、AC、AD、BC、BD、CD;根据欧拉四面体公式,得到该模型的体积V,再利用解三角形的方法计算出底面积S,根据等体积法:V=(1/3)*S*h0得出目标定位人员相对于辅助定位人员的相对垂直距离h0度。
说明书
技术领域
本发明涉及无线信息处理技术,尤其涉及一种多人协作式楼层定位方法和系统。
背景技术
随着经济的高速发展,建筑变得越来越高且越来越庞大,于是室内定位成为了一个新的研究课题,并且目前已取得了一定的结果。楼层定位属于室内定位的一种,目前存在很多技术瓶颈。首先,GPS不能应用于室内定位;因为GPS只适用于视距的定位,但是建筑会有很多墙壁阻挡。其次,传统的WiFi三点定位模型和红外线定位技术并不能应用于楼层定位。此外,目前的研究大部分是局限于平面内的,对于楼层定位来说,它是一种立体模型,因此需要新的方法。为了定位目标人员的所在楼层,人们提出了各种解决办法,其中不乏结合三轴陀螺仪传感器、气压计等装置来实现定位人员的定位,但这种方法要么造价极高,或者是需要训练,并且精度不能达到要求。因此,我们急切需要找到一种可靠的,适应多种环境的定位目标定位人员所在楼层的方法和系统。
发明内容
为了克服上述所指的现有技术中的不足之处,本发明提供一种多人协作式楼层定位方法及系统,解决现有技术中楼层定位造价高且精度较低的问题。
本发明是通过以下技术方案实现的:
一种多人协作式楼层定位方法,包括如下步骤:
(S1)目标定位单元以及协助单元互相接收彼此的无线信号,收集信号信息,连同惯性传感器采集的信息一并发送到服务器端;
(S2) 构建楼层定位模型,获取模型数据信息;
(S3)计算出楼层定位算法的系统参数,并得到目标定位单元的最终的高度值。
作为本发明的进一步改进:所述协助单元为三个或者三个以上,且位于同一楼层。
作为本发明的进一步改进:所述步骤S1互相接收彼此的无线信号包括:
S11、目标定位单元所配装置发送定位信号,基于载波侦听多路访问技术;
S12、 接收到定位信号的协助单元发送自己的MAC地址给服务器,服务器选择其中的3位协助单元,并确定发送信号的时间片;
S13、附近的协助单元按照服务器的规定按时发送以及接收电磁波信号,并将数据返回给服务器,所述的电磁波数据包括接收信号强度、到达时间,所述的惯导数据包括角加速度,三个方向的速度、加速度。
作为本发明的进一步改进:所述步骤2中,根据惯性传感器的信息以及电磁波信号文件构建楼层定位模型,并得出模型的相关数据;利用装置返回得到的数据构建模型是基于四面体的一个立体模型,所述得出模型数据是指利用电磁波相位差测距法计算出立体模型六条边的长度。
作为本发明的进一步改进:所述步骤(S3)具体为:
S31、通过惯性传感器采集的数据计算出目标定位单元相对地面的高度;
S32、根据楼层定位模型以及得出的模型的边长,利用欧拉四面体公式以及解三角形的方法计算出模型的高;
S33、利用卡尔曼数据分析算法以及主成分数据分析方法,对所计算出的高度进行分析,确定该测量系统的参数,并最终得出当前目标当前的高度。
本发明同时提供了一种多人协作式楼层定位系统,包括:
目标定位单元以及配备装置单元,用于采集定位人员实时所处的环境数据并返回给服务器;
服务器单元,用于处理回馈过来的数据并负责将结果展示出来。
作为本发明的进一步改进:所述的目标定位单元以及配备装置单元包括:
惯性传感器模块:主要通过收集目标定位单元的速度和加速度,以用来测量其相对于地面的垂直高度;
危险报警模块:用于危险情况的手动或自动报警;
电磁波收发模块:用来跟服务器通讯和跟协助单元通讯;
救援模块:用于提供救援信息。
作为本发明的进一步改进:所述的服务器单元包括:
通讯模块:收发无线电信号,包括接收定位装置发送过来的目标定位单元楼层信息文件,以及发送指令给定位装置;
数据处理模块:服务器收到定位装置发送过来的文件以后,得到两个信息:(1)目标定位单元相对于地面的垂直距离h1;(2)目标定位单元相对于协助单元的相对垂直距离h0;服务器还存储了该目标定位单元的上一周期所得到的相对于地面的垂直高度h2,以及协助单元相对于地面的垂直高度h3;服务器根据这四个值,进行主成分分析,得到目标定位单元当前相对于地面的高度h;
时钟同步与控制模块:用来控制目标定位单元佩戴装置与协助单元通讯时的具体发送电磁波信号的时间片,以及确定楼层定位的周期;
应用程序显示模块:数据处理模块计算出当前目标定位单元的高度以后,该模块将结果显示到用户界面,指挥人员观察现场目标定位单元的所在楼层位置。
本发明的有益效果:本发明基于火灾等恶劣环境和多名定位人员,将目的定位人员与辅助定位人员建立联系,消除目的定位人员的累积误差,从而实现有效的楼层定位的功能,其有益效果包括:在火场等恶劣环境中定位系统依旧有效,测量误差小,不需要预先试验,在现有的通讯设备的基础上,进行稍微改进,造价不高。可以同时定位多名定位人员的所在楼层,并具备危险处理模块,能够极大地保证定位人员的生命安全。
附图说明
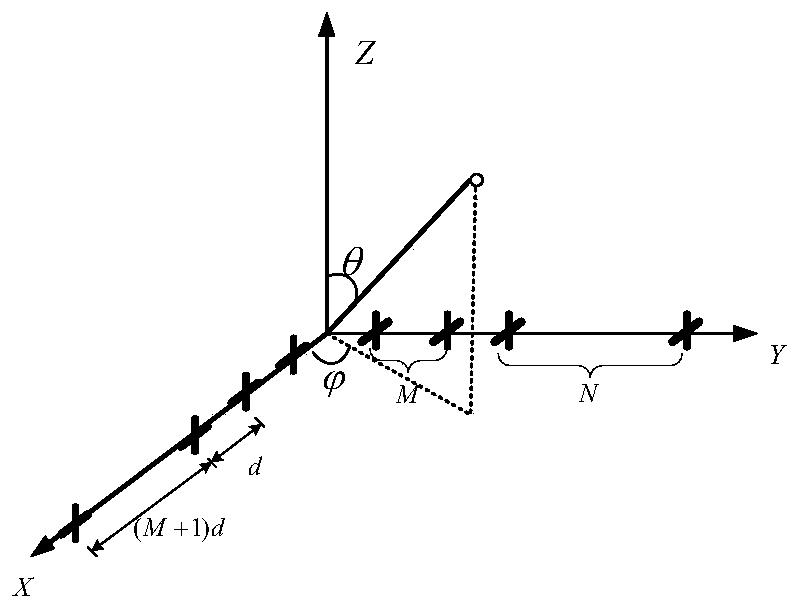
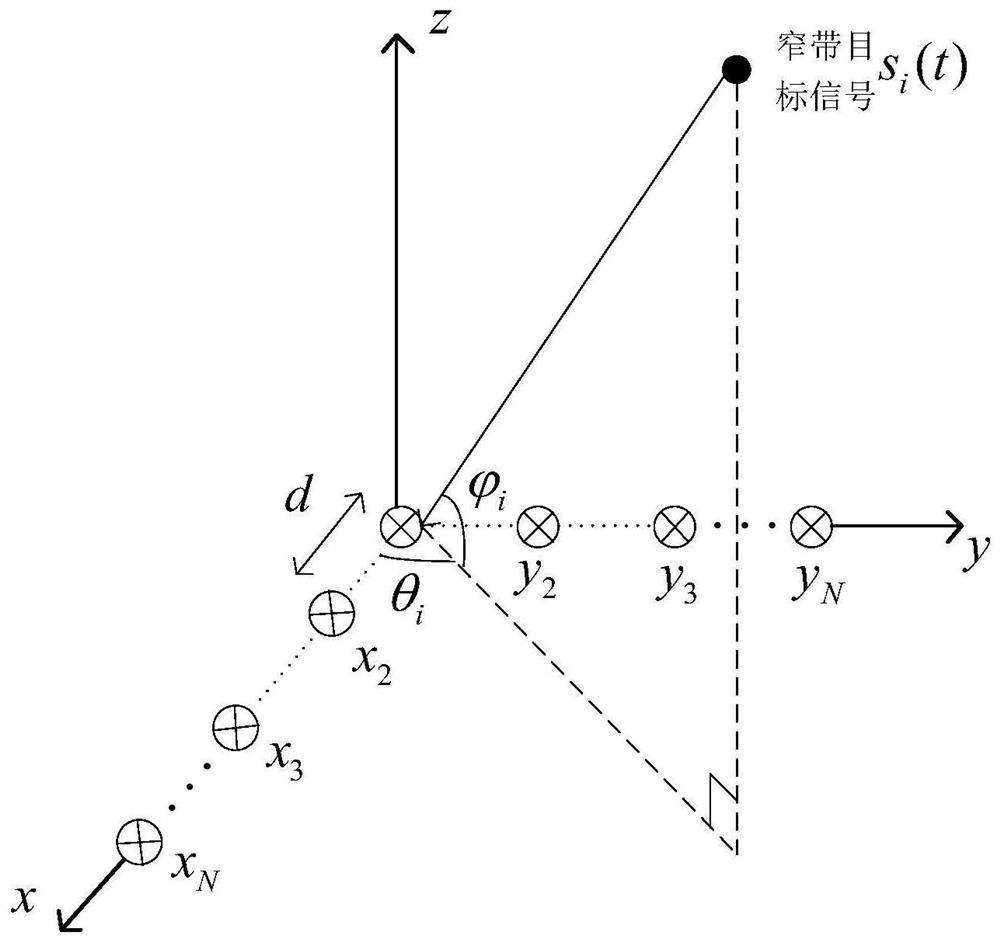
图1本发明的定位人员定位算法的立体三维模型。
具体实施方式
下面结合附图和实施例对本发明作进一步的描述。
一种多人协作式楼层定位方法,包括如下步骤:
(S1)目标定位单元以及协助单元互相接收彼此的无线信号,收集信号信息,连同惯性传感器采集的信息一并发送到服务器端;
(S2) 构建楼层定位模型,获取模型数据信息;
(S3)计算出楼层定位算法的系统参数,并得到目标定位单元的最终的高度值。
所述协助单元为三个或者三个以上,且位于同一楼层。
所述步骤S1互相接收彼此的无线信号包括:
S11、目标定位单元所配装置发送定位信号,基于载波侦听多路访问技术;
S12、 接收到定位信号的协助单元发送自己的MAC地址给服务器,服务器选择其中的3位协助单元,并确定发送信号的时间片;
S13、附近的协助单元按照服务器的规定按时发送以及接收电磁波信号,并将数据返回给服务器,所述的电磁波数据包括接收信号强度、到达时间,所述的惯导数据包括角加速度,三个方向的速度、加速度。
所述步骤2中,根据惯性传感器的信息以及电磁波信号文件构建楼层定位模型,并得出模型的相关数据;利用装置返回得到的数据构建模型是基于四面体的一个立体模型,所述得出模型数据是指利用电磁波相位差测距法计算出立体模型六条边的长度。
所述步骤(S3)具体为:
S31、通过惯性传感器采集的数据计算出目标定位单元相对地面的高度;
S32、根据楼层定位模型以及得出的模型的边长,利用欧拉四面体公式以及解三角形的方法计算出模型的高;
S33、利用卡尔曼数据分析算法以及主成分数据分析方法,对所计算出的高度进行分析,确定该测量系统的参数,并最终得出当前目标当前的高度。
本发明同时提供了一种多人协作式楼层定位系统,包括:
目标定位单元以及配备装置单元,用于采集定位人员实时所处的环境数据并返回给服务器;
服务器单元,用于处理回馈过来的数据并负责将结果展示出来。
所述的目标定位单元以及配备装置单元包括:
惯性传感器模块:主要通过收集目标定位单元的速度和加速度,以用来测量其相对于地面的垂直高度;
危险报警模块:用于危险情况的手动或自动报警;
电磁波收发模块:用来跟服务器通讯和跟协助单元通讯;
救援模块:用于提供救援信息。
所述的服务器单元包括:
通讯模块:收发无线电信号,包括接收定位装置发送过来的目标定位单元楼层信息文件,以及发送指令给定位装置;
数据处理模块:服务器收到定位装置发送过来的文件以后,得到两个信息:(1)目标定位单元相对于地面的垂直距离h1;(2)目标定位单元相对于协助单元的相对垂直距离h0;服务器还存储了该目标定位单元的上一周期所得到的相对于地面的垂直高度h2,以及协助单元相对于地面的垂直高度h3;服务器根据这四个值,进行主成分分析,得到目标定位单元当前相对于地面的高度h;
时钟同步与控制模块:用来控制目标定位单元佩戴装置与协助单元通讯时的具体发送电磁波信号的时间片,以及确定楼层定位的周期;
应用程序显示模块:数据处理模块计算出当前目标定位单元的高度以后,该模块将结果显示到用户界面,指挥人员观察现场目标定位单元的所在楼层位置。
本发明适用于(1):火灾场景,以便在大火环境中,利用手机惯性传感器以及能够收发电磁波的装置,实现对每一个消防员的楼层定位,并显示在终端(手机,电脑)上,如果消防员发生危险,我们就可以快速地找到消防员所在位置,最大程度地保护消防员的生命;同时也方便指挥人员更好地对救援力量进行有效率的调度部署,更快地控制火灾。(2)反恐,有了楼层定位方法,同样可以知道警察的所在楼层,一旦收到警察发过来的报警信号,所有人员就可以知道哪个楼层有恐怖分子。(3)安防,在一些不允许多人聚集的环境下,使用楼层定位系统,可以检测某时刻具体楼层的总人数,一旦多于阀值,表明有可能出现多人聚集情况。(4)商业也可以利用楼层定位方法来观察一天时间内楼层的总人数情况,判断人数越多,说明市场需求也有可能更大。
在一实施例中,一种人员定位装置,包括了手机上的惯性传感器,惯性传感器用来测量人员的所在的高度,同时,为了提高楼层定位的精度,降低错误率,装置上新增了能够收发电磁波的仪器,它用来测量目标定位人员与辅助定位人员的相对垂直高度差。此外,还需一种定位辅助装置,它包括了能够收发电磁波的仪器。
以上所述目标定位人员定位装置的应用方法,包括以下步骤:S1、目标定位人员寻找附近携带了定位装置的人员,然后定位人员之间(包括目标定位人员和辅助定位人员)互相通信,并将所获信息发送到服务器;S2、服务器利用楼层定位算法,结合目标定位人员和辅助定位人员发送过来的信息,定位出目标定位人员所在的楼层。S3、自底向上地,服务器定位每一位目标定位人员的位置,当所有人员都已经定位完成,检查定位人员是否出现异常,如果出现异常,马上叫辅助定位人员去指定楼层观察情况,如果没有异常,执行下一步骤; S4、将目标定位人员发送信号到定位完成视为一个时钟周期,在每个时钟周期里,重复上述步骤S1、S2、S3,直到行动结束。
所述的目标定位人员是指需要做楼层定位的定位人员;附近的人员充当辅助定位人员的角色,他们为同一楼层,且数目至少为3个。同一个人不同时间内可以做目标定位人员,也可以做辅助定位人员。
所述步骤S1里面辅助定位人员的寻找和通讯包括:S11、目标定位人员定位装置发送电磁波信号来寻找附近的辅助定位人员;S12、接收到来自目标定位人员的电磁波信号的辅助定位人员,通过随身佩戴装置,发送唯一的MAC地址给服务器;S13、服务器根据装置的历史高度选取3个或者3个以上的辅助定位人员。并决定每位定位人员(包括目标定位人员和辅助定位人员)通讯发生的时间片;S14、定位人员们的装置按照服务器确定的时间片发送电磁波信号,然后定位人员们将各自收集的包括惯性传感器和电磁波收集的信息发送到服务器。
所述步骤S2利用的定位算法是基于电磁波的相位差测距算法。所述步骤S2包括:S21、服务器根据由定位人员发送过来的电磁波信号序列根据MAC地址实施数据分割得到子序列,用相位差测距算法计算任意相邻两个定位人员的相对距离,生成一个四面体模型,然后计算该四面体的高,即为目标定位人员相对辅助定位人员的垂直距离h0;S22、服务器在根据由定位人员发送过来的惯性传感器的信号计算出每位定位人员相对地面的高度差h1。S23、服务器在根据定位人员的上一个时钟周期确定的高度h2,结合目标定位人员相对辅助定位人员的垂直距离h0,、辅助定位人员的高度h3、目标定位人员相对地面的高度h1,按照一定权重最终确定目标定位人员所在的楼层。
所述步骤S3包括:S31、服务器根据定位人员上一个时钟周期所在楼层,按从底层到顶层的顺序,计算出每一个定位人员当前时钟周期的所在楼层。S32、服务器确定好每一位定位人员所在的楼层后,在每个时钟周期下刷新显示每位定位人员所在楼层的应用程序;S33、定位人员另外带有报警器,如果定位人员30秒静止不动,将会自动报警,另外如果定位人员觉得有危险,也可以手动报警,服务器将收到定位人员的报警信号,然后服务器选择并告知最靠近目标定位人员的辅助定位人员,让其对目标定位人员进行救援。
给出的是一个四面体的模型,该模型用来计算目标定位人员相对于辅助定位人员的相对垂直距离h0;首先,服务器根据接收的文件使用电磁波相位差测距算法计算出六条边的长度,即AB、AC、AD、BC、BD、CD;根据欧拉四面体公式,得到该模型的体积V,再利用解三角形的方法计算出底面积S,根据等体积法:V=(1/3)*S*h0得出目标定位人员相对于辅助定位人员的相对垂直距离h0。
本发明还提供了一种定位人员楼层定位系统,基于无线网络信号传输技术,包括:电磁波收发模块,用于发送电磁波信号和接收电磁波信号;惯性传感器模块,用于测量定位人员的垂直速度和垂直加速度;楼层定位模块,用于利用楼层定位算法消除累积误差,计算精确度较高的高度值;警报模块,用于判断定位人员发生危险时,向服务器发出危险警报信号。二维动态显示模块,用于实时显示每位定位人员的当前所在楼层以及历史所在楼层的一条路径。
本发明还可以结合群智感知的方法(如利用居民的手机路径数据)构造出一个建筑的三维结构,并对给这个三维结构建筑编码并存储于数据库中,等需要的时候,按照地标调出三维结构,辅助楼层定位进行多人定位。
在又一实施例中,一种具体实现多定位人员楼层定位的流程,具体包括以下步骤:
步骤1:给所有的定位人员部署任务,必须指定其中三位定位人员在一楼或者在低层楼;
步骤2:其他多个定位人员从底层出发,每位定位人员配备定位装置,启动服务器定位应用程序,设置当前定位人员为第一个定位人员;
步骤3:服务器发送激活指令让定位人员定位装置发出电磁波信号,类似于载波侦听访问(OFDM),寻找辅助定位人员;
步骤4:接收到电磁波信号的定位人员发送MAC地址给服务器,服务器选择三个辅助定位人员;并决定这四个装置,即目的定位人员和附近的三位定位人员的装置,发送电磁波信号的时间片;
步骤5:相关的定位装置按照服务器的指令发送电磁波信号并收集电磁波信号,连同惯性传感器模块的信息一并发送回给服务器;
步骤6:服务器收集信息并使用楼层定位算法计算出目的定位人员的当前相对地面的垂直高度,同时检测是否出现异常,如果出现异常,采取上述的应急措施;
步骤7:重复上述步骤3~6,计算其他定位人员的位置,当所有定位人员的位置计算完成,进入下一步骤;
步骤8:检查救援行动是否结束;如果结束,终止应用程序;如果没有结束,进入下一个时钟周期,重上述步骤的2~7。
以上内容是结合具体实现方式对本发明做的进一步阐述,不应认定本发明的具体实现只局限于以上说明。对于本技术领域的技术人员而言,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,均应视为有本发明所提交的权利要求确定的保护范围之内。
多人协作式楼层定位方法和系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0