








专利摘要
本发明属于机械手技术领域,具体的说是一种数控机床机械手,包括底座、支撑板和吸盘,所述底座的上表面转动连接有机械臂;所述机械臂的顶部位置转动连接有伸缩连接柱;所述伸缩连接柱的下表面固连有转动块;所述转动块的下表面转动连接有支撑板;所述支撑板的下方设有均匀布置的吸盘;本发明有效的解决了现有技术中,单一操作、效率较慢、难以满足不同大小加工件的上下料的需求、费用较高和机械手空间可调性较差等问题,有效的实现了多数量和多种类的加工件的同时上下料,通用性更强,且可以进行吸盘位置的自动调节,能有效的适用于不同位置加工件的吸附,自由度更高,有效的减少了机械手夹紧装置的体积。
权利要求
1.一种数控机床机械手,包括底座(1)、支撑板(2)和吸盘(3),其特征在于:所述底座(1)的上表面转动连接有机械臂(11);所述机械臂(11)的顶部位置转动连接有伸缩连接柱(12);所述伸缩连接柱(12)的下表面固连有转动块(13);所述转动块(13)的下表面转动连接有支撑板(2);所述支撑板(2)的下表面固连有十字固定滑块(21);所述十字固定滑块(21)的下表面中心位置固连有第一滑块(22);所述十字固定滑块(21)的四个端头位置均滑动连接有第二滑块(23);所述第二滑块(23)的左右两侧侧面均开设有第一滑槽;所述第一滑槽的内部均滑动连接有气缸(25);两个所述第二滑块(23)之间均滑动连接有第三滑块(24);所述第三滑块(24)的数量为四,以十字固定滑块(21)的中心为圆心均匀布置,且第二滑块(23)和第三滑块(24)之间交错布置;所述第三滑块(24)相对第二滑块(23)的一侧侧面均开设有第二滑槽,气缸(25)的活塞杆均滑动连接于对应的第二滑槽内;所述第一滑块(22)、第二滑块(23)和第三滑块(24)相背于十字固定滑块(21)的一侧侧面均设有吸盘(3);
所述第一滑块(22)、第二滑块(23)和第三滑块(24)相背于十字固定滑块(21)的一侧侧面均开设有第三滑槽;所述第三滑槽的内部均滑动连接有滑动板(31);所述滑动板(31)相背于第三滑槽的一侧侧面均开设有第四滑槽;所述第四滑槽的内部均滑动连接有滑动柱;所述滑动柱相背于第二滑槽的一侧侧面均固连于吸盘(3);
所述滑动柱均包括有固定柱(32)和移动柱(33),固定柱(32)均滑动连接于对应的第四滑槽,移动柱(33)均固连于对应的吸盘(3),且移动柱(33)上下滑动连接于固定柱(32);所述固定柱(32)和滑动柱之间均固连有弹簧(34);
所述十字固定滑块(21)的四个端面位置均开设有第五滑槽;所述第五滑槽的内部滑动连接有支撑块(35);
所述支撑块(35)的左右两侧侧面均固连有对称设置的第一限位块(36),且每个支撑块(35)固连的第一限位块(36)的数量均为四;所述第二滑块(23)于支撑块(35)侧面的两个第一限位块(36)之间位置均固连有第二限位块(37);
所述第一限位块(36)相对于第二限位块(37)的一侧侧面均固连有第一气囊(38);所述第五滑槽的槽底位置均固连有第二气囊(39),且第二气囊(39)与对应的第一气囊(38)之间均通过管道连通;
工作时,当数控机床需要进行上下料时,通过转动调节机械臂(11)使得支撑板(2)位于加工件的正上方位置,且首先使得第一滑块(22)位于对应的加工件的正上方位置,然后使第二滑块(23)均在十字固定滑块(21)的表面滑动,使得第二滑块(23)均滑动到对应的加工件的正上方位置,然后控制气缸(25)的活塞杆顶出或收缩,进而带动第三滑块(24)进行位置调整,实现将第三滑块(24)滑动到对应加工件的正上方位置,然后控制伸缩连接柱(12)向下顶起,伸缩连接柱(12)会带动支撑板(2)向下移动,进而带动第一滑块(22)、第二滑块(23)和第三滑块(24)上对应设置的吸盘(3)均贴附于对应加工件的上表面,实现对多个加工件的同时吸附,然后转动调节机械臂(11),实现将多个加工件同时从数控机床的内部拿出,或将外部未加工的加工件同时放入到数控机床的内部;初始条件下,吸盘(3)均位于对应的第一滑块(22)、第二滑块(23)和第三滑块(24)的中点位置,通过滑动板(31)在第三滑槽的内部滑动,再通过滑动柱在第四滑槽的内部滑动,能够实现对滑动柱表面固连的吸盘(3)微调,使得吸盘(3)能够进一步移动到对应的加工件的正上方;通过设置固定柱(32)和移动柱(33),且移动柱(33)上下滑动连接于固定柱(32),且固定柱(32)和移动柱(33)之间均设置弹簧(34),能够实现吸盘(3)上下位置的调整;通过设置支撑块(35),当第二滑块(23)向外滑动到一定的距离时,第二滑块(23)底部的支撑块(35)也会同时向外滑动;通过设置第一限位块(36)和第二限位块(37),当第二滑块(23)向外滑动到一定距离时,第二限位块(37)会顶到第一限位块(36),使得第一限位块(36)能够带动支撑块(35)向外移动,当第二滑块(23)进行向内运动时,同样能够通过第二限位块(37)和第一限位块(36)带动支撑板(2)的内收;当第二滑块(23)内收时,通过设置第一气囊(38)和第二气囊(39),当第二滑块(23)回收的过程中,第二限位块(37)会挤压对应第一限位块(36)表面固连的第一气囊(38),使得第一气囊(38)内的气体会通过管道进入到第五滑槽的槽底的第二气囊(39)内。
说明书
技术领域
本发明属于机械手技术领域,具体的说是一种数控机床机械手。
背景技术
由于工业自动化的全面发展和科学技术的不断提高,对工作效率的提高迫在眉睫,单纯的手工劳作已满足不了工业自动化的要求,因此必须利用先进的自动化机械设备以取代人的劳动,满足工业自动化的需求,其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度。
机械手,指能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,主要由执行机构、驱动机构和控制系统三大部分组成,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而应用于机械制造、冶金、电子、轻工和原子能等部门,尤其在数控机床领域得到了广泛应用。
现有技术中,每个数控机床机械手每次均只能进行单个加工件的上下料,效率较慢,且针对多种加工件进行上下料时,需要的机械手的夹紧装置大小不同,设计时仅仅通过扩大夹紧装置的大小,来满足不同大小的加工件,费用较高,且机械手的夹具较大时,需要的空间较大,容易和数控机床的开口碰撞,因此程序设定的要求更高等问题。
鉴于此,为了克服上述技术问题,本公司设计研发了一种数控机床机械手,解决了上述技术问题。
发明内容
为了弥补现有技术的不足,解决现有技术中每个数控机床机械手每次均只能进行单个加工件的上下料,效率较慢,且针对多种加工件进行上下料时,需要的机械手的夹紧装置大小不同,设计时仅仅通过扩大夹紧装置的大小,来满足不同大小的加工件,费用较高,且机械手的夹具较大时,需要的空间较大,容易和数控机床的开口碰撞,因此程序设定的要求更高等问题。本发明提出一种数控机床机械手。
本发明解决其技术问题所采用的技术方案是:本发明所述的一种数控机床机械手,包括底座、支撑板和吸盘,所述底座的上表面转动连接有机械臂;所述机械臂的顶部位置转动连接有伸缩连接柱;所述伸缩连接柱的下表面固连有转动块;所述转动块的下表面转动连接有支撑板;所述支撑板的下表面固连有十字固定滑块;所述十字固定滑块的下表面中心位置固连有第一滑块;所述十字固定滑块的四个端头位置均滑动连接有第二滑块;所述第二滑块的左右两侧侧面均开设有第一滑槽;所述第一滑槽的内部均滑动连接有气缸;两个所述第二滑块之间均滑动连接有第三滑块;所述第三滑块的数量为四,以十字固定滑块的中心为圆心均匀布置,且第二滑块和第三滑块之间交错布置;所述第三滑块相对第二滑块的一侧侧面均开设有第二滑槽,气缸的活塞杆均滑动连接于对应的第二滑槽内;所述第一滑块、第二滑块和第三滑块相背于十字固定滑块的一侧侧面均设有吸盘;工作时,当数控机床需要进行上下料时,通过转动调节机械臂使得支撑板位于加工件的正上方位置,且首先使得第一滑块位于对应的加工件的正上方位置,然后使第二滑块均在十字固定滑块的表面滑动,使得第二滑块均滑动到对应的加工件的正上方位置,然后控制气缸的活塞杆顶出或收缩,进而带动第三滑块进行位置调整,实现将第三滑块滑动到对应加工件的正上方位置,然后控制伸缩连接柱向下顶起,伸缩连接柱会带动支撑板向下移动,进而带动第一滑块、第二滑块和第三滑块上对应设置的吸盘均贴附于对应加工件的上表面,实现对多个加工件的同时吸附,然后转动调节机械臂,即可实现将多个加工件同时从数控机床的内部拿出,或将外部未加工的加工件同时放入到数控机床的内部,通过一种数控机床机械手有效的解决了现有技术中,每个数控机床机械手每次均只能进行单个加工件的上下料,效率较慢,且针对多种加工件进行上下料时,需要的机械手的夹紧装置大小不同,设计时仅仅通过扩大夹紧装置的大小,来满足不同大小的加工件,费用较高,且机械手的夹具较大时,需要的空间较大,容易和数控机床的开口碰撞,因此程序设定的要求更高等问题,有效的实现了多数量和多种类的加工件的同时上下料,通用性更强,且可以进行吸盘位置的自动调整,能有效的适用于不同位置加工件的吸附,自由度更高,有效的节省了机械手夹紧装置的体积。
优选的,所述第一滑块、第二滑块和第三滑块相背于十字固定滑块的一侧侧面均开设有第三滑槽;所述第三滑槽的内部均滑动连接有滑动板;所述滑动板相背于第三滑槽的一侧侧面均开设有第四滑槽;所述第四滑槽的内部均滑动连接有滑动柱;所述滑动柱相背于第二滑槽的一侧侧面均固连于吸盘;工作时,初始条件下,吸盘均位于对应的第一滑块、第二滑块和第三滑块的中点位置,但是当加工件的体积较小时,第一滑块、第二滑块第三滑块难以移动到加工件的正上方,因此通过设置滑动板和滑动柱,通过滑动板在第三滑槽的内部滑动,再通过滑动柱在第四滑槽的内部滑动,由于第三滑槽和第四滑槽均为相互垂直方式开设,因此可以实现对滑动柱表面固连的吸盘微调,使得吸盘能够进一步移动到对应的加工件的正上方,有效的满足了小件加工件上下料的需求。
优选的,所述滑动柱均包括有固定柱和移动柱,固定柱均滑动连接于对应的第四滑槽,移动柱均固连于对应的吸盘,且移动柱上下滑动连接于固定柱;所述固定柱和滑动柱之间均固连有弹簧;工作时,当加工件的位置高度不在同一水平面上,或加工件的高度大小存在差异时,由于吸盘均位于同一平面,因此多个加工件同时上下料时,容易使得较低高度的加工件,较难以被吸盘吸附,造成多个加工件上下料的稳定性严重下降,通过设置固定柱和移动柱,且移动柱上下滑动连接于固定柱,且固定柱和移动柱之间均设置弹簧,因此可以实现吸盘上下位置的调整,满足了不同高度加工件同时上下料的需求,且弹簧的弹性作用可以起到一定的缓冲作用,防止了当吸盘压附加工件较紧时,造成产品或吸盘的损坏。
优选的,所述十字固定滑块的四个端面位置均开设有第五滑槽;所述第五滑槽的内部滑动连接有支撑块;工作时,当第二滑块往外滑动距离较大时,第二滑块和十字固定滑块的有效接触面减少,因此十字固定滑块对第二滑块的支撑作用大幅降低,当对较重的加工件进行上下料时,机械手的稳定性降低,因此通过设置支撑块,当第二滑块向外滑动到一定的距离时,第二滑块底部的支撑块也会同时向外滑动,一方面可以增加第二滑块向外滑动的距离,另一方面极大的增加了第二滑块的稳定性。
优选的,所述支撑块的左右两侧侧面均固连有对称设置的第一限位块,且每个支撑块固连的第一限位块的数量均为四;所述第二滑块于支撑块侧面的两个第一限位块之间位置均固连有第二限位块;工作时,由于第二滑块和支撑板之间的相对位置关系需要进行严格的控制,才能满足有效的支撑,如果通过控制系统来进行实现,一方面技术要求增加,另一方面设备的维护成本提高,因此通过设置第一限位块和第二限位块,当第二滑块向外滑动到一定距离时,第二限位块会顶到第一限位块,使得第一限位块可以带动支撑块向外移动,当第二滑块进行向内运动时,同样可以通过第二限位块和第一限位块带动支撑板的内收,结构简单,有效的降低了技术成本。
优选的,所述第一限位块相对于第二限位块的一侧侧面均固连有第一气囊;所述第五滑槽的槽底位置均固连有第二气囊,且第二气囊与对应的第一气囊之间均通过管道连通;工作时,当第二滑块内收时,为了高效,往往速度较快,因此第一限位块和第二限位块、支撑块和十字固定滑块之间均容易产生撞击,长期的使用容易造成机械手运动机构的磨损甚至损坏,因此通过设置第一气囊和第二气囊,当第二滑块回收的过程中,第二限位块会挤压对应第一限位块表面固连的第一气囊,使得第一气囊内的气体会通过管道进入到第五滑槽的槽底的第二气囊内,当支撑块和第五滑槽的槽底接触时,均可以起到一定的缓冲作用,有效的增加了机械手的使用寿命。
本发明的有益效果如下:
1.本发明所述的一种数控机床机械手,通过设置底座、支撑板和吸盘,通过底座的上表面转动连接机械臂,机械臂的顶部位置转动连接伸缩连接柱,伸缩连接柱的下表面固连转动块,转动块的下表面转动连接支撑板,支撑板的下方设置均匀布置的吸盘,有效的解决了现有技术中,每个数控机床机械手每次均只能进行单个加工件的上下料,效率较慢,且针对多种加工件进行上下料时,需要的机械手的夹紧装置大小不同,设计时仅仅通过扩大夹紧装置的大小,来满足不同大小的加工件,费用较高,且机械手的夹具较大时,需要的空间较大,容易和数控机床的开口碰撞,因此程序设定的要求更高等问题,有效的实现了多数量和多种类的加工件的同时上下料,通用性更强,且可以进行吸盘位置的自动调整,能有效的适用于不同位置加工件的吸附,自由度更高,有效的节省了机械手夹紧装置的体积。
2.本发明所述的一种数控机床机械手,通过设置滑动板、滑动柱和支撑块,通过吸盘的上表面固连滑动柱,滑动柱的上表面滑动连接滑动板,且十字固定滑块的四个端面位置均滑动连接支撑块,可以实现对滑动柱表面固连的吸盘微调,使得吸盘能够进一步移动到对应的加工件的正上方,有效的满足了小件加工件上下料的需求,且通过支撑块的支撑作用,一方面可以增加第二滑块向外滑动的距离,另一方面极大的增加了第二滑块的稳定性,提高了机械手有效工作负载的重量。
附图说明
下面结合附图对本发明作进一步说明。
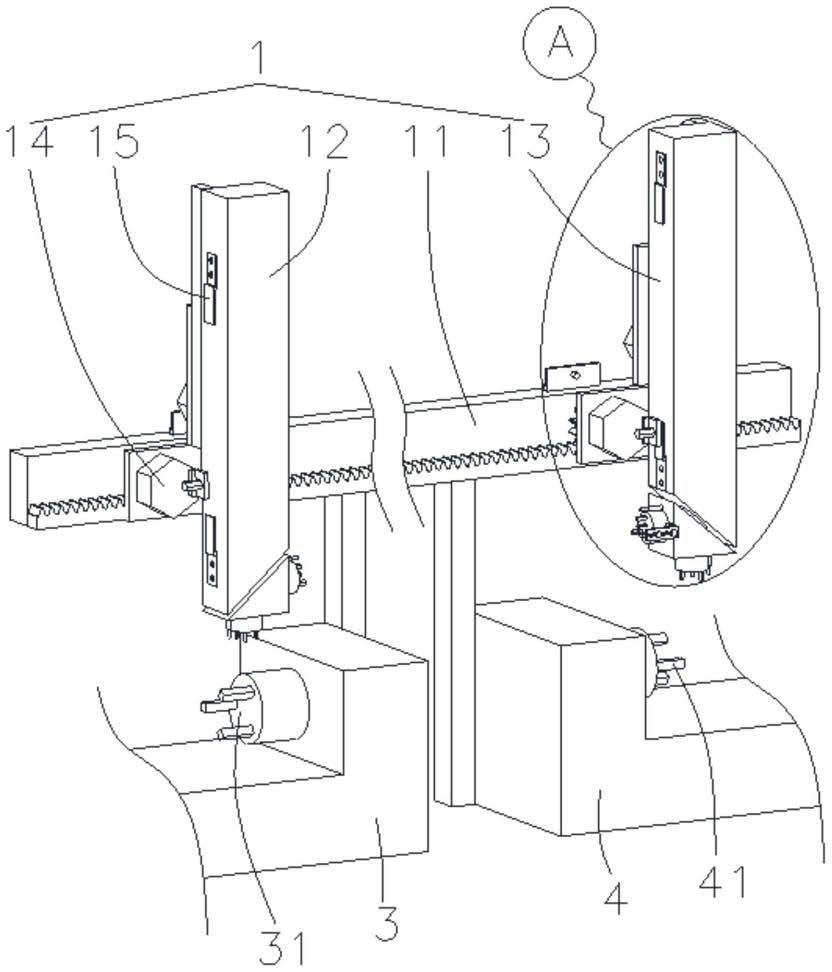
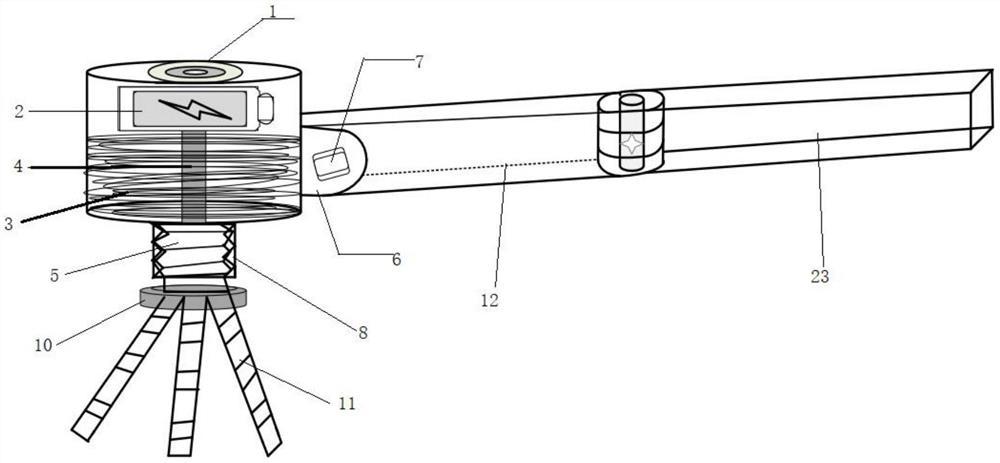
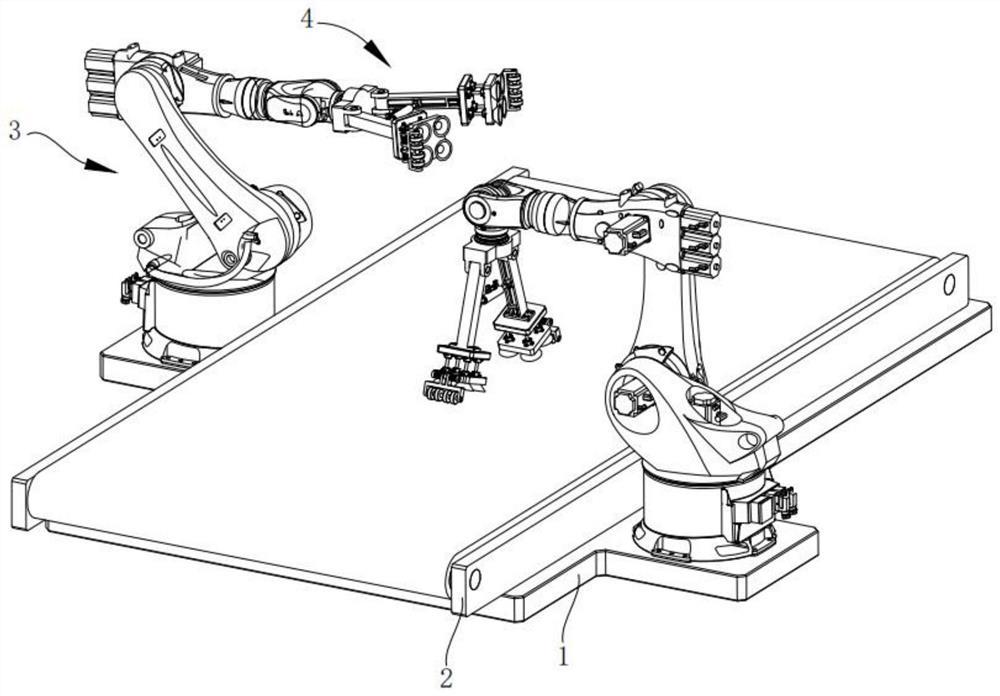
图1是本发明的立体图;
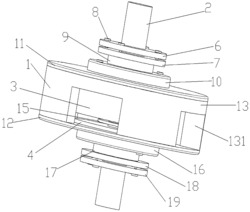
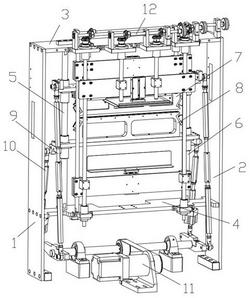
图2是本发明的剖视图;
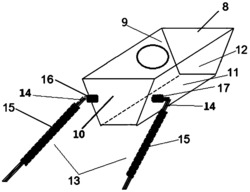
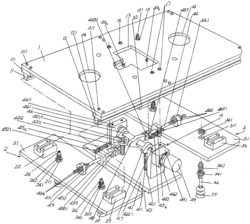
图3是本发明的吸附部件的第一立体图;
图4是本发明的吸附部件的第二立体图;
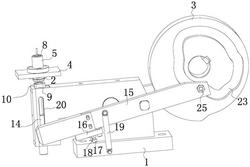
图5是图2中A处的局部放大视图;
图6是图2中B处的局部放大视图;
图中:底座1、机械臂11、伸缩连接柱12、转动块13、支撑板2、十字固定滑块21、第一滑块22、第二滑块23、第三滑块24、气缸25、吸盘3、滑动板31、固定柱32、移动柱33、弹簧34、支撑块35、第一限位块36、第二限位块37、第一气囊38、第二气囊39。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1至图6所示,本发明所述的本发明所述的一种数控机床机械手,包括底座1、支撑板2和吸盘3,所述底座1的上表面转动连接有机械臂11;所述机械臂11的顶部位置转动连接有伸缩连接柱12;所述伸缩连接柱12的下表面固连有转动块13;所述转动块13的下表面转动连接有支撑板2;所述支撑板2的下表面固连有十字固定滑块21;所述十字固定滑块21的下表面中心位置固连有第一滑块22;所述十字固定滑块21的四个端头位置均滑动连接有第二滑块23;所述第二滑块23的左右两侧侧面均开设有第一滑槽;所述第一滑槽的内部均滑动连接有气缸25;两个所述第二滑块23之间均滑动连接有第三滑块24;所述第三滑块24的数量为四,以十字固定滑块21的中心为圆心均匀布置,且第二滑块23和第三滑块24之间交错布置;所述第三滑块24相对第二滑块23的一侧侧面均开设有第二滑槽,气缸25的活塞杆均滑动连接于对应的第二滑槽内;所述第一滑块22、第二滑块23和第三滑块24相背于十字固定滑块21的一侧侧面均设有吸盘3;工作时,当数控机床需要进行上下料时,通过转动调节机械臂11使得支撑板2位于加工件的正上方位置,且首先使得第一滑块22位于对应的加工件的正上方位置,然后使第二滑块23均在十字固定滑块21的表面滑动,使得第二滑块23均滑动到对应的加工件的正上方位置,然后控制气缸25的活塞杆顶出或收缩,进而带动第三滑块24进行位置调整,实现将第三滑块24滑动到对应加工件的正上方位置,然后控制伸缩连接柱12向下顶起,伸缩连接柱12会带动支撑板2向下移动,进而带动第一滑块22、第二滑块23和第三滑块24上对应设置的吸盘3均贴附于对应加工件的上表面,实现对多个加工件的同时吸附,然后转动调节机械臂11,即可实现将多个加工件同时从数控机床的内部拿出,或将外部未加工的加工件同时放入到数控机床的内部,通过一种数控机床机械手有效的解决了现有技术中,每个数控机床机械手每次均只能进行单个加工件的上下料,效率较慢,且针对多种加工件进行上下料时,需要的机械手的夹紧装置大小不同,设计时仅仅通过扩大夹紧装置的大小,来满足不同大小的加工件,费用较高,且机械手的夹具较大时,需要的空间较大,容易和数控机床的开口碰撞,因此程序设定的要求更高等问题,有效的实现了多数量和多种类的加工件的同时上下料,通用性更强,且可以进行吸盘3位置的自动调整,能有效的适用于不同位置加工件的吸附,自由度更高,有效的节省了机械手夹紧装置的体积。
作为本发明的一种实施方式,所述第一滑块22、第二滑块23和第三滑块24相背于十字固定滑块21的一侧侧面均开设有第三滑槽;所述第三滑槽的内部均滑动连接有滑动板31;所述滑动板31相背于第三滑槽的一侧侧面均开设有第四滑槽;所述第四滑槽的内部均滑动连接有滑动柱;所述滑动柱相背于第二滑槽的一侧侧面均固连于吸盘3;工作时,初始条件下,吸盘3均位于对应的第一滑块22、第二滑块23和第三滑块24的中点位置,但是当加工件的体积较小时,第一滑块22、第二滑块23第三滑块24难以移动到加工件的正上方,因此通过设置滑动板31和滑动柱,通过滑动板31在第三滑槽的内部滑动,再通过滑动柱在第四滑槽的内部滑动,由于第三滑槽和第四滑槽均为相互垂直方式开设,因此可以实现对滑动柱表面固连的吸盘3微调,使得吸盘3能够进一步移动到对应的加工件的正上方,有效的满足了小件加工件上下料的需求。
作为本发明的一种实施方式,所述滑动柱均包括有固定柱32和移动柱33,固定柱32均滑动连接于对应的第四滑槽,移动柱33均固连于对应的吸盘3,且移动柱33上下滑动连接于固定柱32;所述固定柱32和滑动柱之间均固连有弹簧34;工作时,当加工件的位置高度不在同一水平面上,或加工件的高度大小存在差异时,由于吸盘3均位于同一平面,因此多个加工件同时上下料时,容易使得较低高度的加工件,较难以被吸盘3吸附,造成多个加工件上下料的稳定性严重下降,通过设置固定柱32和移动柱33,且移动柱33上下滑动连接于固定柱32,且固定柱32和移动柱33之间均设置弹簧34,因此可以实现吸盘3上下位置的调整,满足了不同高度加工件同时上下料的需求,且弹簧34的弹性作用可以起到一定的缓冲作用,防止了当吸盘3压附加工件较紧时,造成产品或吸盘3的损坏。
作为本发明的一种实施方式,所述十字固定滑块21的四个端面位置均开设有第五滑槽;所述第五滑槽的内部滑动连接有支撑块35;工作时,当第二滑块23往外滑动距离较大时,第二滑块23和十字固定滑块21的有效接触面减少,因此十字固定滑块21对第二滑块23的支撑作用大幅降低,当对较重的加工件进行上下料时,机械手的稳定性降低,因此通过设置支撑块35,当第二滑块23向外滑动到一定的距离时,第二滑块23底部的支撑块35也会同时向外滑动,一方面可以增加第二滑块23向外滑动的距离,另一方面极大的增加了第二滑块23的稳定性。
作为本发明的一种实施方式,所述支撑块35的左右两侧侧面均固连有对称设置的第一限位块36,且每个支撑块35固连的第一限位块36的数量均为四;所述第二滑块23于支撑块35侧面的两个第一限位块36之间位置均固连有第二限位块37;工作时,由于第二滑块23和支撑板2之间的相对位置关系需要进行严格的控制,才能满足有效的支撑,如果通过控制系统来进行实现,一方面技术要求增加,另一方面设备的维护成本提高,因此通过设置第一限位块36和第二限位块37,当第二滑块23向外滑动到一定距离时,第二限位块37会顶到第一限位块36,使得第一限位块36可以带动支撑块35向外移动,当第二滑块23进行向内运动时,同样可以通过第二限位块37和第一限位块36带动支撑板2的内收,结构简单,有效的降低了技术成本。
作为本发明的一种实施方式,所述第一限位块36相对于第二限位块37的一侧侧面均固连有第一气囊38;所述第五滑槽的槽底位置均固连有第二气囊39,且第二气囊39与对应的第一气囊38之间均通过管道连通;工作时,当第二滑块23内收时,为了高效,往往速度较快,因此第一限位块36和第二限位块37、支撑块35和十字固定滑块21之间均容易产生撞击,长期的使用容易造成机械手运动机构的磨损甚至损坏,因此通过设置第一气囊38和第二气囊39,当第二滑块23回收的过程中,第二限位块37会挤压对应第一限位块36表面固连的第一气囊38,使得第一气囊38内的气体会通过管道进入到第五滑槽的槽底的第二气囊39内,当支撑块35和第五滑槽的槽底接触时,均可以起到一定的缓冲作用,有效的增加了机械手的使用寿命。
具体工作流程如下:
工作时,当数控机床需要进行上下料时,通过转动调节机械臂11使得支撑板2位于加工件的正上方位置,且首先使得第一滑块22位于对应的加工件的正上方位置,然后使第二滑块23均在十字固定滑块21的表面滑动,使得第二滑块23均滑动到对应的加工件的正上方位置,然后控制气缸25的活塞杆顶出或收缩,进而带动第三滑块24进行位置调整,实现将第三滑块24滑动到对应加工件的正上方位置,然后控制伸缩连接柱12向下顶起,伸缩连接柱12会带动支撑板2向下移动,进而带动第一滑块22、第二滑块23和第三滑块24上对应设置的吸盘3均贴附于对应加工件的上表面,实现对多个加工件的同时吸附,然后转动调节机械臂11,即可实现将多个加工件同时从数控机床的内部拿出,或将外部未加工的加工件同时放入到数控机床的内部;初始条件下,吸盘3均位于对应的第一滑块22、第二滑块23和第三滑块24的中点位置,但是当加工件的体积较小时,第一滑块22、第二滑块23第三滑块24难以移动到加工件的正上方,因此通过设置滑动板31和滑动柱,通过滑动板31在第三滑槽的内部滑动,再通过滑动柱在第四滑槽的内部滑动,由于第三滑槽和第四滑槽均为相互垂直方式开设,因此可以实现对滑动柱表面固连的吸盘3微调,使得吸盘3能够进一步移动到对应的加工件的正上方;当加工件的位置高度不在同一水平面上,或加工件的高度大小存在差异时,由于吸盘3均位于同一平面,因此多个加工件同时上下料时,容易使得较低高度的加工件,较难以被吸盘3吸附,造成多个加工件上下料的稳定性严重下降,通过设置固定柱32和移动柱33,且移动柱33上下滑动连接于固定柱32,且固定柱32和移动柱33之间均设置弹簧34,因此可以实现吸盘3上下位置的调整;当第二滑块23往外滑动距离较大时,第二滑块23和十字固定滑块21的有效接触面减少,因此十字固定滑块21对第二滑块23的支撑作用大幅降低,当对较重的加工件进行上下料时,机械手的稳定性降低,因此通过设置支撑块35,当第二滑块23向外滑动到一定的距离时,第二滑块23底部的支撑块35也会同时向外滑动;由于第二滑块23和支撑板2之间的相对位置关系需要进行严格的控制,才能满足有效的支撑,如果通过控制系统来进行实现,一方面技术要求增加,另一方面设备的维护成本提高,因此通过设置第一限位块36和第二限位块37,当第二滑块23向外滑动到一定距离时,第二限位块37会顶到第一限位块36,使得第一限位块36可以带动支撑块35向外移动,当第二滑块23进行向内运动时,同样可以通过第二限位块37和第一限位块36带动支撑板2的内收;当第二滑块23内收时,为了高效,往往速度较快,因此第一限位块36和第二限位块37、支撑块35和十字固定滑块21之间均容易产生撞击,长期的使用容易造成机械手运动机构的磨损甚至损坏,因此通过设置第一气囊38和第二气囊39,当第二滑块23回收的过程中,第二限位块37会挤压对应第一限位块36表面固连的第一气囊38,使得第一气囊38内的气体会通过管道进入到第五滑槽的槽底的第二气囊39内。
以上显示和描述了本发明的基本原理、主要特征和优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内,本发明要求保护范围由所附的权利要求书及其等效物界定。
一种数控机床机械手专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0