

IPC分类号 : G01N15/02,G01N1/10,G01N21/84,G05D27/02






专利摘要
本发明涉及一种雾滴参数测量装置及利用该装置雾滴参数测量分析方法,装置包括箱体,箱体内部通过隔板分隔出暗箱,暗箱的顶部安装有摄像头,摄像头上安装有环形光源,暗箱的底部安装有可探出箱体的底板,底板的顶面上安装有背光光源,背光光源的上方放置有载玻片;箱体内还安装湿度调控机构;方法利用装置的便携性,可适用于各种复杂的环境的测量作业,利用暗箱的结构与外界隔离,可保证测量环境的稳定性以及湿度的可控性,对图像的处理分析利用得到二值图像的方法对雾滴颗粒进行定量分析。本发明能够适应户外复杂的测量环境且能保证测量结果的准确可靠性,同时,整个装置结构简单、操控方便,整个方法流程简单,便于实施。
说明书
技术领域
本发明涉及喷雾技术领域,具体的说是一种雾滴参数测量装置以及利用该装置的雾滴参数测量分析方法。
背景技术
喷雾技术在工农业生产领域中发挥着重要的作用,其广泛应用于喷涂、食品加工、农业植保、药品生产、喷雾冷却、卫生防疫和燃料雾化等领域。
农药喷洒作业中,在喷射药量相同的情况下,单个雾滴直径越小,雾滴数目越多,覆盖面积越大,防治效果也越好。在食品、化工、医药等工业中进行喷雾干燥时,雾滴的大小直接影响到产品的颜色、容重、溶解度、扩散性等物理性质。因此,雾滴直径分布指数是喷雾技术中最重要的参数,也是决定喷雾机具性能的重要指标之一,准确测量雾滴尺寸、掌握喷雾雾滴尺寸分布规律,对更好地控制喷雾过程具有重要意义。
传统的雾滴尺寸测量主要是通过试样测量的方法。所谓试样测量方法是指通过将雾滴沉积在水敏纸或油敏纸上形成印痕,或者通过油盘法将雾滴收集在一个油质基块上,然后再放置在光学显微镜下进行雾滴尺寸测定。该方法通过人工分析雾滴尺寸和分布,工作强度大且操作费时、费力。同时,光学显微镜携带不便,不适于野外测量。另外,该方法未考虑到环境因素对雾滴颗粒的影响,导致测量准确性差,测量结果不可靠。
发明内容
本发明要解决的第一个技术问题是提供一种结构简单、操作方便、能保证测量数据准确可靠且能适于野外测量环境的雾滴参数测量装置。
本发明要解决的第二个技术问题是提供一种流程简单、实施方便、测量结果准确可靠的雾滴参数测量分析方法。
为解决上述第一个技术问题,本发明的雾滴参数测量装置包括箱体,其结构特点是所述箱体内部通过隔板分隔出暗箱,暗箱的顶部安装有摄像头,摄像头上安装有环形光源,暗箱的底部滑动安装有由电机驱动且可探出箱体的底板,底板的顶面上安装有背光光源,背光光源的上方放置有载玻片;箱体内还安装有可调节暗箱内湿度的湿度调控机构;箱体内还设置有与摄像头的信号输出端电连接的DSP图像处理系统以及与电机、环形光源、背光光源以及湿度调控机构电连接的ARM控制系统。
采用上述结构,箱体可以十分方便的携带至测量现场,尤其是户外的测量现场,利用底板的滑动伸缩结构,当底板滑出箱体时,利用其上的载玻片可以收集雾滴颗粒,收集完成后再缩回到暗箱内,使得雾滴颗粒的采集变得非常简单;在暗箱内,外界的光照射不到,背光光源与环形光源配合照明,利用摄像头进行图像采集,保证了图像更加明亮清晰,有助于后续的采集和分析处理;设置湿度调控机构,可对暗箱内的湿度进行调整,尤其是对湿度进行调整,避免雾滴颗粒存在过多的挥发、蒸发以及聚合现象,保证单个雾滴颗粒的完整性和独立性,从而保证对雾滴图像信息的准确性和可靠性。
所述湿度调控机构包括风扇、温湿度传感器和雾化器,风扇安装在暗箱的侧壁上,温湿度传感器安装在暗箱内壁上,雾化器的雾化喷口与暗箱连通。温湿度传感器用于实时监测暗箱内的温度和湿度信息,然后将温湿度信息传递给ARM控制系统,ARM控制系统依据湿度信息分别对雾化器和风扇进行合理控制,使得暗箱内保持最佳湿度,从而保证测量结果的可靠性。
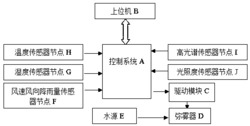
所述DSP图像处理系统包括与摄像头的信号输出端电连接的视频解码器和与视频解码器电连接的DSP芯片;所述ARM控制系统包括ARM芯片、与ARM芯片电连接的温湿度信号接收电路、电机控制电路和操作显示控制电路,所述雾化器、风扇、环形光源和背光光源均由继电器控制,各继电器的控制端均与ARM芯片电连接;所述DSP芯片与ARM芯片通信连接。装置集成ARM嵌入式微处理器和DSP数字信号处理器的双处理器架构,DSP作为图像处理模块的核心,凭借其强大的运算处理能力,主要完成图像的采集、处理和分析等任务,进一步保证测量结果的可靠性;ARM以其强大的控制能力作为系统主控模块的核心,完成系统配置和控制功能,可为用户提供良好的人机交互界面,操控更加方便。
所述操作显示控制电路包括安装在箱体外壁上的人机界面显示屏和操作按键。显示屏用于实时显示图像和文字信息,反应测量结果,操作按键用于设置系统参数和手动操作控制。
所述箱体侧壁上还安装有扬声器,扬声器由继电器控制且该继电器的控制端与ARM芯片电连接。设置扬声器,在系统出现异常时,可用于报警。例如当暗箱内湿度超过设定的阈值时,扬声器报警,工作人员终止当前操作,进行检修或者重新测量。
所述底板的顶面上开设有沉槽,所述背光光源包括嵌装在上述沉槽内且顶部敞口的光源盒、安装在光源盒内的LED灯组以及封装在光源盒顶部敞口上的透光板。背光光源采用盒式结构,载波片放置在透光板上,灯光照射在载玻片的底部,便于摄像头采集图像信息。
所述箱体的侧壁上开设有可供底板伸出的开口,底板的外伸端固接有可将上述开口封闭的盖板。盖板可将开口封闭,避免外部的光线或者灰尘杂质等进入暗箱而影响测量结果。
所述暗箱的底部安装有滑轨,底板的底部安装有与滑轨滑动配合且由电机驱动的滚轮。底板采用该种滑动安装的结构,通过控制电机的正反转来实现底板的伸缩动作,运行平稳且操控方便。
为解决上述第二个技术问题,本发明的雾滴参数测量分析方法,其特征是该方法包括如下步骤:
步骤1)将装置携带至测量现场,将装置系统初始化,设置温度和湿度参数;
步骤2)控制底板伸出箱体外部,利用载波片收集雾滴;
步骤3)收集雾滴结束后,控制底板缩回暗箱内,利用湿度调控机构调节暗箱内的湿度,并对温湿度进行记录,打开摄像头和光源,进行图像采集;
步骤4)利用DSP图像处理系统对采集的图像进行灰度变换,将彩色图像转换成灰度图像;
步骤5)采用边缘保持滤波法抑制图像中的各种噪声,锐化雾滴图像边缘信息,改善图像质量;
步骤6)采用迭代阈值法对图像进行阈值分割,将采集到的图像转化为二值图像;
步骤7)扫描整幅二值图像,依据对二值图像的分析得出雾滴参数并进行输出和显示。
步骤7)中所述的雾滴参数包括雾滴个数、雾滴面积、雾滴周长和雾滴覆盖率。
上述方法中,利用装置的便携性,可适用于各种复杂环境的测量作业,利用箱体内的暗箱结构可保证测量环境的稳定性以及湿度的可控性,从而能够保证图像信息采集的准确可靠性;对图像的处理分析依次经过灰度变换、图像降噪处理、阈值化分割后形成二值图像,得到的二值图像可方便的进行定量分析,从而可得到准确可靠的雾滴参数信息,试验结果精确可靠。
综上所述,本发明能够适应户外复杂的测量环境且能保证测量结果的准确可靠性,同时,整个装置结构简单、操控方便,整个方法流程简单,便于实施。
附图说明
下面结合附图和具体实施方式对本发明作进一步详细说明:
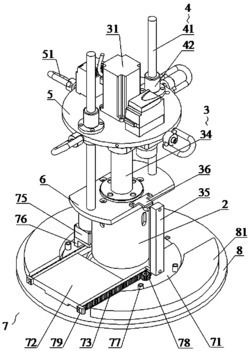
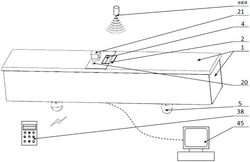
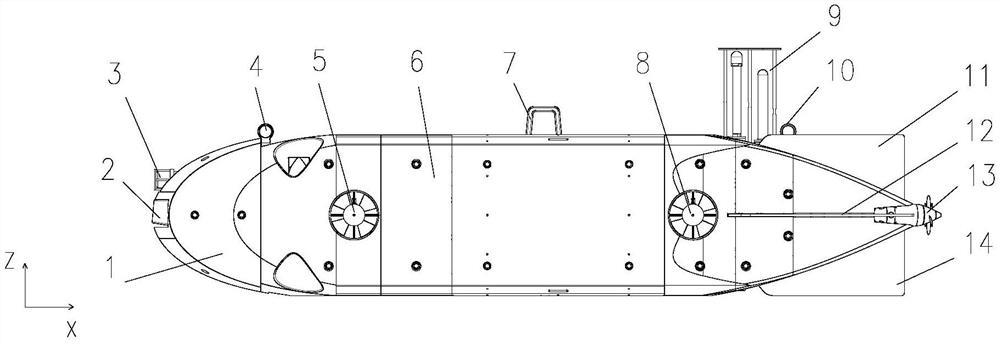
图1为本发明的整体结构示意图;
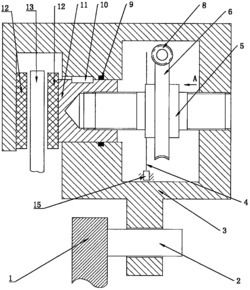
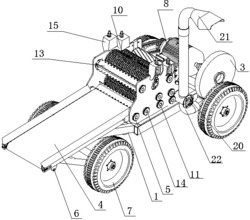
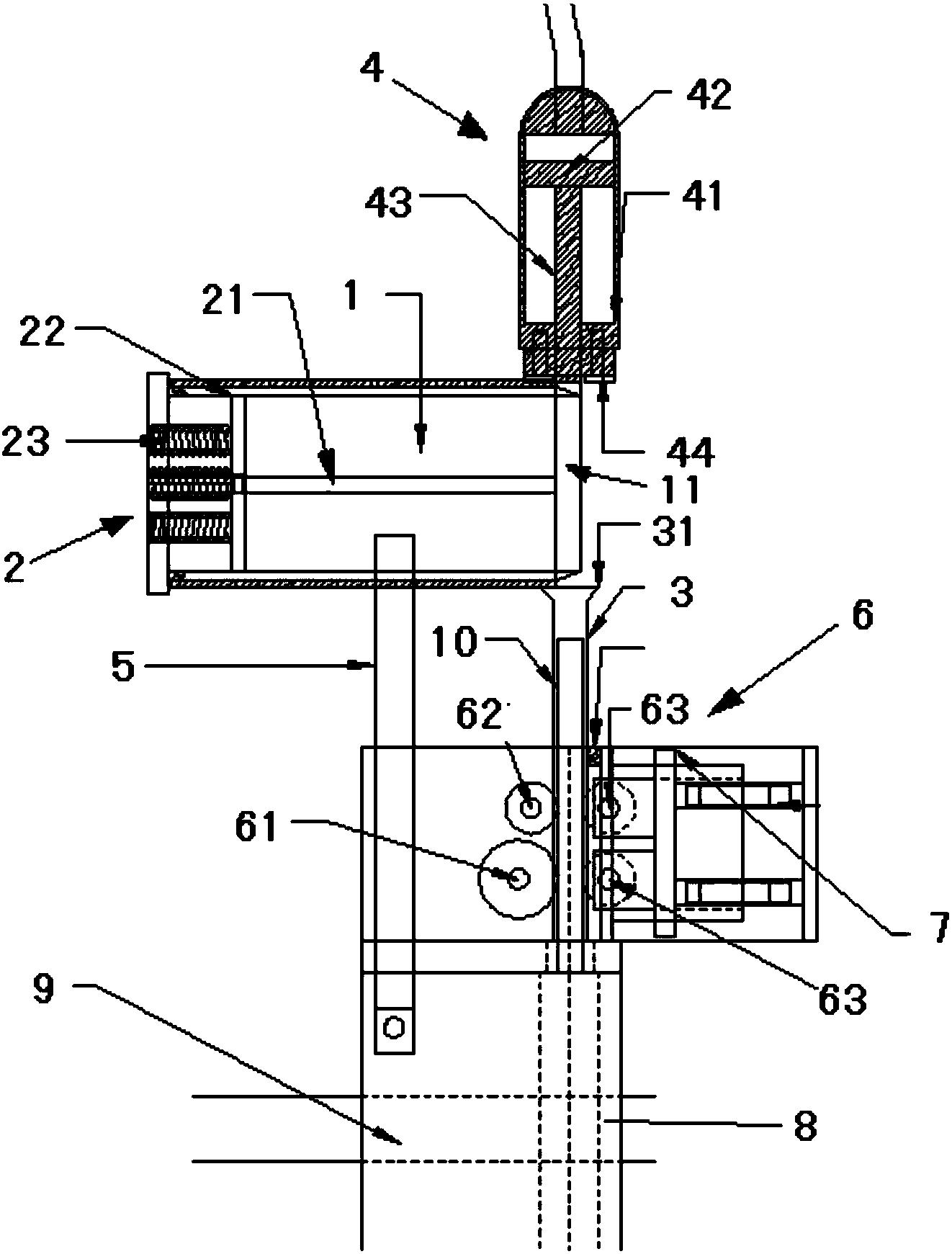
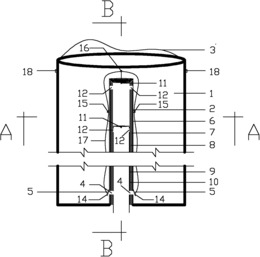
图2为图1中的A部放大结构示意图;
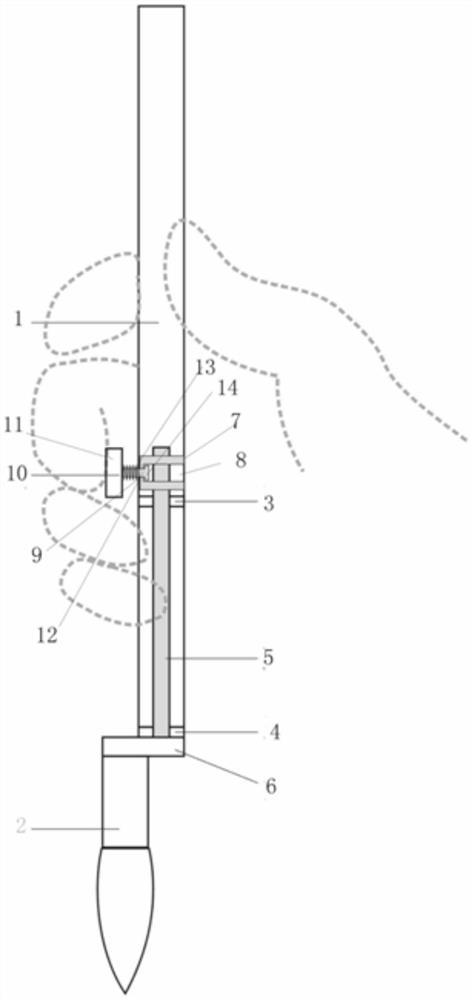
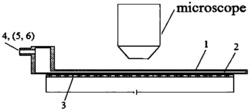
图3为本发明其中一种工作状态的结构示意图;
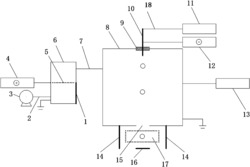
图4为本发明另一种工作状态的结构示意图;
图5为本发明整个系统的控制原理示意框图;
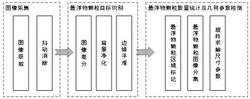
图6为雾滴图像分析模块化流程框图;
图7为雾滴图像处理系统软件系统架构图。
具体实施方式
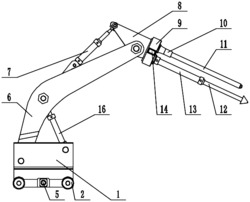
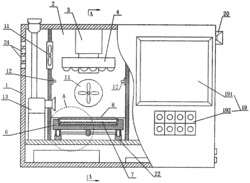
参照附图,该雾滴参数测量装置包括箱体1,箱体1内部通过隔板分隔出暗箱2,暗箱2的顶部安装有摄像头3,摄像头3上安装有环形光源4,暗箱2的底部滑动安装有由电机5驱动且可探出箱体1的底板6,箱体1的侧壁上开设有可供底板6伸出的开口,底板6的外伸端固接有可将上述开口封闭的盖板21。盖板21可将开口封闭,避免外部的光线或者灰尘杂质等进入暗箱2而影响测量结果。对于底板6的滑动安装结构,本发明优选的为:暗箱2的底部安装有滑轨22,底板6的底部安装有与滑轨22滑动配合且由电机5驱动的滚轮23。通过控制电机5的正反转来实现底板6的伸缩动作,运行平稳且操控方便。底板6的顶面上安装有背光光源7,背光光源7的上方放置有载玻片8。底板6的顶面上开设有沉槽,背光光源7包括嵌装在上述沉槽内且顶部敞口的光源盒71、安装在光源盒71内的LED灯组72以及封装在光源盒71顶部敞口上的透光板73。载波片8放置在透光板73上,灯光照射在载玻片8的底部。透光板73可采用透明玻璃板,根据图像采集的需要以及雾滴不同颜色的需求,透明板还可采用有色玻璃板,同样的,载波片8也可采用透明片或者有色片。箱体1内安装有可调节暗箱2内湿度的湿度调控机构。箱体1内还设置有与摄像头3的信号输出端电连接的DSP图像处理系统9以及与电机5、环形光源4、背光光源7以及湿度调控机构电连接的ARM控制系统10。
参照附图,湿度调控机构包括风扇11、温湿度传感器12和雾化器13,风扇11安装在暗箱2的侧壁上,温湿度传感器12安装在暗箱2内壁上,雾化器13的雾化喷口与暗箱2连通。温湿度传感器12用于实时监测暗箱2内的温度和湿度信息,然后将温湿度信息传递给ARM控制系统10,ARM控制系统10依据湿度信息分别对雾化器13和风扇11进行合理控制,使得暗箱2内保持最佳湿度,从而保证测量结果的可靠性。温湿度传感器12的作用是测量暗箱2内的温、湿度信息并作为实验条件进行记录,其中,为了保证湿度检测的可靠性,温湿度传感器12在暗箱的两侧内壁各设置一个。另外,为了能够快速调节湿度,风扇11也设置两个,由于风扇11安装在隔板上,在箱体1的箱壁上开设通风孔24,以保证空气畅通。风扇11的该种安装结构还存在一个好处,通风孔24设置在箱体壁上而不是设置在隔板上,可以避免外界光照射到暗箱2内而影响图像采集时雾滴的成像,从而能够保证测量结果的准确性。
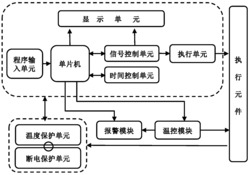
参照附图,DSP图像处理系统9包括与摄像头3的信号输出端电连接的视频解码器14和与视频解码器14电连接的DSP芯片15。ARM控制系统10包括ARM芯片16、与ARM芯片16电连接的温湿度信号接收电路17、电机控制电路18和操作显示控制电路19,雾化器13、风扇11、环形光源4和背光光源7均由继电器控制,各继电器的控制端均与ARM芯片16电连接;DSP芯片15与ARM芯片16通信连接。操作显示控制电路19包括安装在箱体1外壁上的人机界面显示屏191和操作按键192。装置集成ARM嵌入式微处理器和DSP数字信号处理器的双处理器架构,DSP芯片作为图像处理模块的核心,凭借其强大的运算处理能力,主要完成图像的采集、处理和分析等任务,进一步保证测量结果的可靠性;ARM芯片以其强大的控制能力作为系统主控模块的核心,完成系统配置和控制功能,可为用户提供良好的人机交互界面,操控更加方便。
上述结构中,整个箱体1可以十分方便的携带至测量现场,尤其是户外的测量现场,利用底板6的滑动伸缩结构,当底板6滑出箱体1时,利用其上的载玻片8可以收集雾滴颗粒,收集完成后再缩回到暗箱2内,使得雾滴颗粒的采集变得非常简单;在暗箱2内,外界的光照射不到,背光光源7与环形光源4配合照明,利用摄像头3进行图像采集,保证了图像更加明亮清晰,有助于后续的采集和分析处理;设置湿度调控机构,可对暗箱内的湿度进行调整,避免雾滴颗粒存在过多的挥发、蒸发以及聚合现象,保证单个雾滴颗粒的完整性和独立性,从而保证雾滴图像信息的准确性和可靠性。
参照附图,箱体1侧壁上还安装有扬声器20,扬声器20由继电器控制且该继电器的控制端与ARM芯片16电连接。在系统出现异常时,扬声器20可用于报警。例如当暗箱2内温度和湿度超过设定的阈值时,扬声器20报警,工作人员终止当前操作,进行检修或者重新测量。
借助于上述装置,本法明的雾滴参数测量分析方法包括如下步骤:
步骤1)将装置携带至测量现场,将装置系统初始化,设置温度和湿度参数;
步骤2)控制底板6伸出箱体1外部,利用载波片8收集雾滴;
步骤3)收集雾滴结束后,控制底板6缩回暗箱2内,利用湿度调控机构调节暗箱内的湿度,并对暗箱内的温、湿度进行记录,打开摄像头3和光源,进行图像采集;
步骤4)利用DSP图像处理系统对采集的图像进行灰度变换,将彩色图像转换成灰度图像;
步骤5)采用边缘保持滤波法抑制图像中的各种噪声,锐化雾滴图像边缘信息,改善图像质量;
步骤6)采用迭代阈值法对图像进行阈值分割,将采集到的图像转化为二值图像;
步骤7)扫描整幅二值图像,依据对二值图像的分析得出雾滴参数并进行输出和显示。其中,雾滴参数包括雾滴个数、雾滴面积、雾滴周长和雾滴覆盖率。
上述方法中,利用装置的便携性,可适用于各种复杂环境的测量作业,利用箱体1内的暗箱2结构与外界隔离,可保证测量环境的稳定性以及湿度的可控性,从而能够保证图像信息采集的准确可靠性。对图像的处理分析依次经过灰度变换、图像降噪处理、阈值化分割后形成二值图像,得到的二值图像可方便的进行定量分析,从而可得到准确可靠的雾滴参数信息,试验结果精确可靠。
对于图像处理,本发明利用WindowsCE6.0作为嵌入式系统平台的操作系统,将这些算法用visualC++语言进行模块化设计,编译成可以完成独立任务的函数,并封装成API以供调用,每个模块包含一类图像处理操作。算法实现集成了图像读取模块、标定模块、图像预处理模块、图像分析模块和显示模块等,单个模块中的每个操作在执行时调用相应的算法,硬件和软件系统共同实现了对雾滴显微图像的获取、处理、统计和分析,进而可以快速、准确地得出雾滴状态参数,其基本流程如图6所示。
本发明中应用软件具有自动分析和手动分析两种模式。自动模式采用默认的图像处理算法,手动模式可以根据实际情况选择相应的处理算法,具体流程如图7所示,其功能设置通过系统设置实现。
自动模式下的具体工作过程如下:
一、初始化,进行信息输入,点亮灯管,接口打开,实现温湿度信息采集,启动CCD摄像机,通过总线将雾滴图片采集到图像处理系统之中。
二、计算机对采集的图像进行灰度变换,将彩色图像转换成灰度图像。结合人眼对颜色的敏感度原理,采用了加权平均法,即:
Y=ωR*R+ωG*G+ωB*B;
其中ωR,ωG,ωB分别为颜色分量R,G,B所对应的权重,Y为灰度图对应点的像素值。由于人眼对绿色的敏感度最高,因此所用的参数设置为ωR=0.30,ωG=0.59,ωB=0.11,得到灰度图像像素值为256级。
三、滤波。为了保证平滑杂点噪声而不破坏图像中雾滴颗粒边缘等特征,系统默认采用边缘保持滤波的方法进行消除。边缘保持算法的基本过程如下:对于图像中的任意一个像素点(x,y)的邻域S,分别计算其左上角S1、左下角S2、右上角S3和右下角S4四个区域的灰度分布均匀度V,最后将均匀度最小区域的平均值作为该像素点的新的灰度值。表示为:
计算灰度均匀度的公式为:
其中Sk为灰度分布均匀度最小的区域,k={1,2,3,4}。均匀度V的计算公式为
其中W为所选定的邻域窗口大小,一般选择3×3,5×5或7×7等窗。其过程为:
(1)确定一个奇数像元的窗口W;
(2)按照从左到右,从上到下的顺序让窗口在图像中移动;
(3)读取窗口内对应像素点四个角区域的灰度分布均匀度,将四个均匀度灰度大小排队;
(4)将均匀度最小区域的平均值代替窗口的中心像素值;
(5)若未扫描完,则跳转到(2);
(6)输出图像。
四、阈值分割。采集的雾滴图像视为具有不同灰度级的两类区域(目标和背景)的组合,为了将雾滴与背景进行分离,其关键是选择合理的分割阈值。当一个像素的灰度值超过这个阈值,就可以说这个像素属于人们感兴趣的目标,反之则属于背景部分。本发明采取迭代阈值法,首先选择一个近似阈值作为估计值的初始值,然后连续不断地改进这一估计值,即利用初始值生成子图像,并根据子图像的特性来选择新的阈值,然后利用新的阈值来分割图像,此分割结果好于用初始阈值分割图像的效果。阈值分割后输出的图像为二值图像。
该算法的步骤如下:
(1)给出图像中的最小和最大灰度值Zt和Zk。令阈值初值T0=(Zt+Zk)/2。
(2)据阈值将图像分割成物体和背景两部分,求出两部分的平均灰度值ZO和ZB。
式中Z(i,j)是图像上(i,j)点的灰度值,N(i,j)是点(i,j))的权重系数一般N(i,j)=1.0。
(3)求出新的阈值:Tk+1=(Zo+Zb)/2。
(4)如果Tk+1=Tk,则输出阈值T,否则转步骤(2).
(5)根据阈值T将原始图像为f(x,y)转化为二值化图像为g(x,y),转化规则为:
转化后雾滴图像为白色,背景为黑色。
(6)将二值化后的图像g(x,y)保存。
五、目标识别。对雾滴的二值图像呈现多点分布,由于存在中心空白的情况,所以需要对其填充,然后进行计数,即数出图像中连通黑区域的数目。计数的方法有利用连通域判别法进行计数,对二值图像从左向右,从上向下进行扫描。要标记当前正被扫描的象素需要检查它在它之前已扫描的若干个近邻象素的连通性。
近邻象素的连通性可利用邻域概念来描述,通常有4-邻域、8-邻域两种,根据现场采集的图像样本分析,考虑8-连通的情况满足要求,所以本发明采用了一种先对雾滴颗粒内径连通区域进行八邻域边缘跟踪,再对连通区域内部进行像素填充的标号计数方法。其具体步骤为:
(1)首先读入预处理后的二值图像,初始化标号参数。
(2)将图像按照从左至右,从下至上的顺序搜索,找到的第一个黑点一定是最左下方的边界点,记为A,A点的右、右上、上、左上四个邻点中至少有一个边界点记为B。
(3)从B开始找起,按右、右上、上、左上、左、左下、下、右下的顺序找下一个边界点C;如果C就是A点,则跟踪结束,将此区域的灰度值填充为标号值,否则从C点继续找,直到找到A点为止。
(4)一个连通区域跟踪完毕后,将标号值加1,并以这一区域的搜索结束点作为起始点再进行逐行扫描,边缘跟踪,区域填充。如此反复,直到对整幅图像扫描完毕。
六、系统标定。为了测量图像中每个像素对应的实际大小,需要在该步骤运行之前需要对摄像机进行标定。尺寸标定的方法:当试验硬件安装固定好后,采用一个大小为10mm×10mm的薄塑片作为标准量块,在不改变测量参数的前提下,计算测量系统的测量比进行标定。用公式表达为:
其中,L为该量块的计算机图像尺寸,以像素点个数表示,L0为该量块的标准尺寸,单位是微米,由此得到该系统每一像素代表的实际长度。以此为换算关系,就可以计算出雾滴参数的实际值。
七、参数统计。主要实现对雾滴个数、周长、面积、圆形度、覆盖率等参数进行测量统计。需要进行测量的参数为:
(1)数目计算:雾滴个数利用区域标记法统计,根据步骤五中连通区域标记中的最大值即为雾滴颗粒的个数N。
(2)面积计算:雾滴面积利用图像中雾滴区域内像素数表示,根据步骤五的标记过程中,对应不同标号建立数组,一个标记点扫描完毕便将该点像素个数存储在该数组中,该值即为雾滴面积。第i个点的面积记为Ai。因此所有雾滴的总面积表示为:
平均每个雾滴的面积表示为:
(3)周长计算:雾滴周长用轮廓线上像素间距离和表示,采用轮廓跟踪算法,跟踪各雾滴边界线的每个黑像素的标号,记录二值雾滴图像边界的坐标值序列。实现步骤如下:
①循环取得各点像素值的标号,搜索出一个起始点,利用轮廓跟踪算法,检索出雾滴的轮廓,保留循环得到的边界点,其余都置为255;
②根据不同的雾滴,依次执行第①步;
③统计每个轮廓的像素个数,即得出每个雾滴的周长(像素个数)。
第i个点的周长记为Ci。
(4)雾滴的直径:认为雾滴图像中的雾滴是接近圆形的,因此按照下面的公式计算雾滴的直径:
式中,Ai为单个雾滴的面积,Di为单个雾滴的当量直径(像素个数)。
基于单个雾滴的直径还可以计算算术平均直径、体积中值直径、面积中值直径、数量中值直径、面积平均中径、索特平均中径等描述雾滴直径的参量。
其中A为已求得的所有雾滴的总面积,M为图像宽度,N为图像高度。
(5)圆形度:正常单个雾滴形状接近圆形,但并非完全是标准圆,雾滴圆度p的具体定义为,圆形度是计算物体形状复杂程度的特征量。假设第i个点的周长记为Ci,面积为Ai,则雾滴的圆形度为:
(6)雾滴覆盖率统计:雾滴覆盖率利用图像中雾滴面积和与整幅图像面积的百分比表示,雾滴图像经过预处理后,就可以对雾滴进行统计。采样卡雾滴覆盖率计算可以通过图像中分析区域雾滴的像素个数与图像的分析区域之比求得,其计算公式为:
其中,A为已求得的所有雾滴的总面积,M为图像宽度,N为图像高度。
主要对雾滴个数、面积(平面上投影面积)、周长、圆形度、覆盖率等参数进行测量统计。其中雾滴个数利用区域标记法统计;雾滴面积利用图像中雾滴区域内像素数表示;雾滴周长用轮廓线上像素间距离和表示;雾滴覆盖率利用图像中雾滴面积和与整幅图像面积的百分比表示。雾滴尺寸可以用很多种方法表示,如算术平均直径、数量中径、体积中径、面积中径和质量中径等,本发明主要利用测得的数据计算雾滴的算术平均直径、数量中径和体积中径,用以衡量雾滴尺寸。
综上所述,本发明不限于上述具体实施方式。本领域技术人员,在不脱离本发明的精神和范围的前提下,可做若干的更改和修饰。本发明的保护范围应以本发明的权利要求为准。
雾滴参数测量装置及利用该装置的雾滴参数测量分析方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0