









专利摘要
本发明涉及一种译码方法、装置及其系统。该方法用于OvTDM系统,包括:接收待译码符号序列;将接收到的所述待译码符号序列分为第一符号序列和第二符号序列;计算所述第一符号序列与对应的2K路理想叠加符号序列中的每路理想叠加符号序列之间的第一距离,根据所述第一距离得到与2k-1个较小距离对应的路径;根据所述与2k-1个较小距离对应的路径对所述第二符号序列中的每个符号逐个进行序列检测,计算第二符号序列中每个符号与对应的2K路理想符号序列中的每路理想符号序列之间的第二距离,在对最后一个符号序列检测后根据所述第二距离得到对应于最小距离的理想符号序列;将对应于最小距离的理想符号序列作为输出符号序列。本发明在同等条件下可达到较高的译码成功率。
权利要求
1.一种译码方法,用于OvTDM系统,其特征在于,包括:
接收待译码符号序列,所述待译码符号序列包括N个符号;
将接收到的所述待译码符号序列分为第一符号序列(1:K)和第二符号序列(K+1:N);所述K小于N;
计算所述第一符号序列(1:K)与对应的2K路理想叠加符号序列中的每路理想叠加符号序列之间的第一距离,根据所述第一距离得到与2k-1个较小距离对应的路径;
根据所述与2k-1个较小距离对应的路径对所述第二符号序列(K+1:N)中的每个符号逐个进行序列检测,计算第二符号序列中每个符号与对应的2K路理想符号序列中的每路理想符号序列之间的第二距离,在对最后一个符号序列检测后根据所述第二距离得到对应于最小距离的理想符号序列;
将所述对应于最小距离的理想符号序列作为输出符号序列。
2.如权利要求1所述的方法,其特征在于,所述第一距离和所述第二距离均为测度距离。
3.如权利要求1所述的方法,其特征在于,所述计算所述第一符号序列(1:K)与对应的2K路理想叠加符号序列中的每路理想叠加符号序列之间的第一距离包括:
根据所述第一符号序列中所包含符号的数目K来生成对应于K个符号的2K个所有可能发送符号序列;
根据所述2K个所有可能发送符号序列的第一个符号来将所述所有可能发送符号序列分为第一部分和第二部分,其中每个部分包括2k-1路可能发送序列;
将所述所有可能发送符号序列的每路符号向后逐级累加,得到K路的理想叠加符号序列;
计算所述第一符号序列中的符号与每路理想叠加符号序列的距离,得到2K条路径;
将所述第一部分和第二部分中对应的区别仅在于第一个符号的可能发送序列的距离分别两两作比较,得到2k-1个较小的距离作为所述第一距离。
4.如权利要求1所述的方法,其特征在于,所述计算每个符号与对应的2K路理想符号序列中的每路理想符号序列之间的第二距离包括:
生成K个符号叠加后的2K路理想符号序列;
确定当前符号的前一节点状态;
根据所述前一节点状态来得到状态转移路径;
根据所述状态转移路径得到当前符号与理想符号之间的2k-1个较小距离作为第二距离。
5.如权利要求1所述的方法,其特征在于,所述第二距离为当前符号累加之后的距离。
6.如权利要求1所述的方法,其特征在于,还包括预处理过程,该预处理过程包括:将所接收的待译码信号与该OvTDM系统同步;在该同步完成后对所接收的待译码信号做信道估计;以及根据取样定理对所接收的待译码信号进行数字化处理。
7.一种译码装置,用于OvTDM系统,其特征在于,包括:
用于接收待译码符号序列的单元,所述待译码符号序列包括N个符号;
用于将接收到的所述待译码符号序列分为第一符号序列(1:K)和第二符号序列(K+1:N)的单元;所述K小于N;
用于计算所述第一符号序列(1:K)与对应的2K路理想叠加符号序列中的每路理想叠加符号序列之间的第一距离,根据所述第一距离得到与2k-1个较小距离对应的路径的单元;
用于根据所述与2k-1个较小距离对应的路径对所述第二符号序列(K+1:N)中的每个符号逐个进行序列检测,计算第二符号序列中每个符号与对应的2K路理想符号序列中的每路理想符号序列之间的第二距离,在对最后一个符号序列检测后根据所述第二距离得到对应于最小距离的理想符号序列的单元;
用于将所述对应于最小距离的理想符号序列作为输出符号序列的单元。
8.如权利要求7所述的译码装置,其特征在于,所述第一距离和所述第二距离均为测度距离。
9.如权利要求7所述的译码装置,其特征在于,所述第二距离为当前符号累加之后的距离。
10.一种OvTDM系统,其特征在于,包括如权利要求7-9中任一项所述的译码装置。
说明书
技术领域
本发明涉及无线通信系统中的信号译码,尤其是涉及一种用于OvTDM的译码方法、装置及其系统。
背景技术
对于无线通信系统,尤其对于OvTDM系统而言,人们的理想期望目标是信号在信道中无失真的传输,且在接收端能够高效快速完全正确的译码得到有效信息。实际系统中,由于真实的信道环境较为复杂,信号的传输过程一般都会使部分信息失真,要想完全译码得到有效信息,发送端和接收端需要使用较大的传输功率和信噪比传输信号,在接收端才能将信息译码正确。然而传输功率是不能无底线的一直抬高的,因此需要寻找一种高效正确的译码方法。
现有技术中在进行序列检测时,大多使用的都是由汉明距离选择最佳路径,而汉明距离需要对接收数据先进行硬判决处理转换为{0,1}序列,然后再比较判决后的真实数据和理想数据的相同个数,序列只有0和1,实际系统中两路数据的汉明距离相同的概率较高,且硬判决后的数据存在一定误差,很难精确的选出一条最佳路径,降低了系统的译码成功率。
发明内容
本发明所要解决的技术问题是提供一种译码方法、装置及其系统,在同等条件下可达到较高的译码成功率。
为此,本发明提供了一种译码方法及装置,以及含有该装置的系统。
本发明提供的的译码方法,用于OvTDM系统,包括:
接收待译码符号序列,所述待译码符号序列包括N个符号;将接收到的所述待译码符号序列分为第一符号序列(1:K)和第二符号序列(K+1:N);计算所述第一符号序列(1:K)与对应的2K路理想叠加符号序列中的每路理想叠加符号序列之间的第一距离,根据所述第一距离得到与2k-1个较小距离对应的路径;根据所述与2k-1个较小距离对应的路径对所述第二符号序列(K+1:N)中的每个符号逐个进行序列检测,计算每个符号与对应的2K路理想符号序列中的每路理想符号序列之间的第二距离,在对最后一个符号序列检测后根据所述第二距离得到对应于最小距离的理想符号序列;将所述对应于最小距离的理想符号序列作为输出符号序列。
根据本发明的一方面,所述第一距离和所述第二距离均为测度距离,测度距离定义为
根据本发明的一方面,所述计算第一符号序列(1:K)与对应的2K路理想叠加符号序列中的每路理想叠加符号序列之间的第一距离包括:根据所述第一符号序列中所包含符号的数目K来生成对应于K个符号的2K个所有可能发送符号序列;根据所述2K个所有可能发送符号序列的第一个符号来将所述所有可能发送符号序列分为第一部分和第二部分,其中每个部分包括2k-1路可能发送序列;将所述所有可能发送符号序列的每路符号向后逐级累加,得到K路的理想叠加符号序列;计算所述第一符号序列中的符号与每路理想叠加符号序列的距离,得到2K条路径;将所述第一部分和第二部分中对应的区别仅在于第一个符号的可能发送序列的距离分别两两作比较,得到2k-1个较小的距离作为所述第一距离。
根据本发明的一方面,所述计算每个符号与对应的2K路理想符号序列中的每路理想符号序列之间的第二距离包括:生成K个符号叠加后的2K路理想符号序列;确定当前符号的前一节点状态;根据所述前一节点状态来得到状态转移路径;根据所述状态转移路径得到当前符号与理想符号之间的2k-1个较小距离作为第二距离。
根据本发明的一方面,所述第二距离为当前符号累加之后的距离。根据本发明的一方面,还包括预处理过程,该预处理过程包括:将所接收的待译码信号与该系统同步;在该同步完成后对所接收的待译码信号做信道估计,该信道估计用于估计实际传输信道的参数;以及根据取样定理对所接收的待译码信号进行数字化处理。
本发明提供的译码装置,用于OvTDM系统,包括:
用于接收待译码符号序列的单元,所述待译码符号序列包括N个符号;用于将接收到的所述待译码符号序列分为第一符号序列(1:K)和第二符号序列(K+1:N)的单元;用于计算所述第一符号序列(1:K)与对应的2K路理想叠加符号序列中的每路理想叠加符号序列之间的第一距离,根据所述第一距离得到与2k-1个较小距离对应的路径的单元;用于根据所述与2k-1个较小距离对应的路径对所述第二符号序列(K+1:N)中的每个符号逐个进行序列检测,计算第二符号序列中每个符号与对应的2K路理想符号序列中的每路理想符号序列之间的第二距离,在对最后一个符号序列检测后根据所述第二距离得到对应于最小距离的理想符号序列的单元;用于将所述对应于最小距离的理想符号序列作为输出符号序列的单元。
根据本发明的一方面,所述第一距离和所述第二距离均为测度距离。
根据本发明的一方面,所述第二距离为当前符号累加之后的距离。
本发明提供的OvTDM系统,包括如上所述的译码装置。
本发明由于采用以上技术方案,因此与现有技术相比具有如下显著优点:
本发明将译码过程分为两部分:(1:K)和(K+1:N)的译码。将前K路信号一次性处理,通过对K路信号的各级逐级累加得到新的K路理想信号,使用实际接收符号序列的前K个符号对新的理想信号依次求测度距离,保留2k-1条最佳路径,实际准确路径肯定包含在这2k-1条路径中,提高了译码的成功率。
进一步,本发明使用测度距离选择最佳路径,测度距离表示两个信号之间的距离,在选择最佳路径时,选择测度距离最小的一条路径作为最佳路径,可以很精确的找到最接近理想信号的路径,提高了系统的译码成功率。
此外,本发明在比较测度距离时,如果只对比当前符号与理想符号的测度距离,随着译码深度的增加,最佳路径可能会有偏差,导致最终译码的成功率降低。由于符号叠加过程本身就是K个符号相互重叠,符号前后关联性较大,因此采取当前测度距离与前面累加的测度距离之和进行判断,这样可以随着译码深度的增加,更精确的判断最佳路径,提高译码成功率。
一般情况下,由于待译码的数据长度较长,且随着译码深度的加深,累加距离越来越大,系统若将所有数据全部译码完成后再进行译码输出,较消耗系统资源,因此对于路径的存储容量和距离的存储采取较优的处理方法。一般选取路径存储长度为4K~5K,此时如果路径存储器已经存满而译码判决输出还未进行可强行判决输出,将具有相同路径的初始节点先进行输出;随着译码深度的加深,累加距离也会越来越大,可将累加距离存储为相对距离,即定义一个参考距离,其取值根据不同的系统而定,距离存储记录的是每条路径的第二距离相对于参考距离的相对值,在进行最佳路径的筛选时通过相对距离进行比较。
附图说明
为让本发明的上述目的、特征和优点能更明显易懂,以下结合附图对本发明的具体实施方式作详细说明,其中:
图1示出OvTDM系统的发射信号生成过程的示例性流程图。
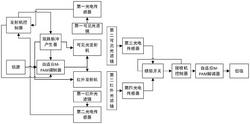
图2示出OvTDM系统的调制单元的示例性框图。
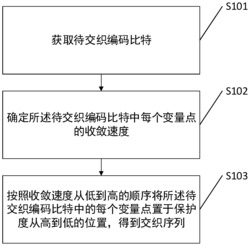
图3示出根据本发明实施例的用于OvTDM系统的译码方法的示例性流程图。
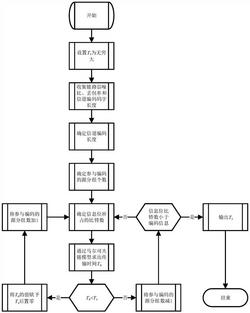
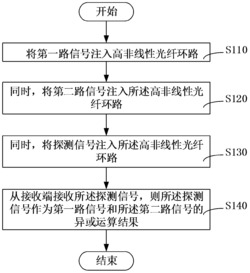
图4示出根据本发明实施例的用于OvTDM系统的译码方法在对待译码信号进行译码之前的预处理过程的流程图。
图5示出根据本发明实施例的符号叠加过程示例图。
图6示出根据本发明实施例的前K列符号排列和符号叠加示例图。
图7示出根据本发明实施例的节点状态转移图。
图8示出根据本发明实施例的OvTDM系统的输入-输出关系树图。
图9示出根据本发明实施例的K=3 OvTDM Trellis图。
图10示出根据本发明实施例的符号序列检测路径图。
具体实施方式
下面结合具体实施例和附图对本发明作进一步说明,在以下的描述中阐述了更多的细节以便于充分理解本发明,但是本发明显然能够以多种不同于此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下根据实际应用情况作类似推广、演绎,因此不应以此具体实施例的内容限制本发明的保护范围。
图1示出系统的发射信号生成过程的示例性流程图。该发射信号生成过程100包括:步骤102,设计生成发送信号的包络波形h(t);步骤104,将所设计的包络波形h(t)经特定时间移位,形成其他各个时刻发送信号包络波形h(t-i×ΔT);步骤106,将所要发送的符号xi与步骤104中生成的相应时刻的包络波形h(t-i×ΔT)相乘,得到各个时刻的待发送信号波形xih(t-i×ΔT);以及步骤108,将待发送信号波形xih(t-i×ΔT)进行叠加,形成发射信号,在该实施例中发射信号可以表示为:
图2示出系统的调制单元的示例性框图。该调制单元200包括:包络波形生成器210,用于生成发送信号的包络波形;移位器220,用于将所设计的包络波形经特定时间移位,形成其他各个时刻发送信号包络波形;乘法器230,用于将所要发送的符号与移位器220中生成的相应时刻的包络波形相乘,得到各个时刻的待发送信号波形;以及叠加器240,用于将待发送信号波形进行叠加,形成发射信号。
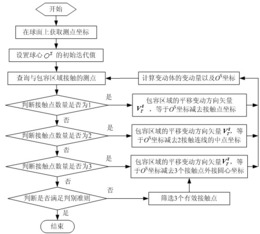
图3示出根据本发明实施例的用于OvTDM系统的译码方法的示例性流程图。该译码方法300包括:步骤302,接收待译码符号序列,所述待译码符号序列包括N个符号;步骤304,将接收到的所述待译码符号序列分为第一符号序列(1:K)和第二符号序列(K+1:N),其中K为重叠复用的次数;步骤306,计算所述第一符号序列(1:K)与对应的2K路理想叠加符号序列中的每路理想叠加符号序列之间的第一距离,根据所述第一距离得到与2k-1个较小距离对应的路径;步骤308,根据所述与2k-1个较小距离对应的路径对所述第二符号序列(K+1:N)中的每个符号逐个进行序列检测,计算每个符号与对应的2K路理想符号序列中的每路理想符号序列之间的第二距离,在对最后一个符号序列检测后根据所述第二距离得到对应于最小距离的理想符号序列;步骤310,将所述对应于最小距离的理想符号序列作为输出符号序列。
在一实施例中,所述第一距离和所述第二距离均为测度距离。
在一实施例中,所述计算所述第一符号序列(1:K)与对应的2K路理想叠加符号序列中的每路理想叠加符号序列之间的第一距离包括:根据所述第一符号序列中所包含符号的数目K来生成对应于K个符号的2K个所有可能发送符号序列;根据所述2K个所有可能发送符号序列的第一个符号来将所述所有可能发送符号序列分为第一部分和第二部分,其中每个部分包括2k-1路可能发送序列;将所述所有可能发送符号序列的每路符号向后逐级累加,得到K路的理想叠加符号序列;计算所述第一符号序列中的符号与每路理想叠加符号序列的距离,得到2K条路径;将所述第一部分和第二部分中对应的区别仅在于第一个符号的可能发送序列的距离分别两两作比较,得到2k-1个较小的距离作为所述第一距离。
在一实施例中,所述计算每个符号与对应的2K路理想符号序列中的每路理想符号序列之间的第二距离包括:生成K个符号叠加后的2K路理想符号序列;确定当前符号的前一节点状态;根据所述前一节点状态来得到状态转移路径;根据所述状态转移路径得到当前符号与理想符号之间的2k-1个较小距离作为第二距离。
在一实施例中,所述第二距离为当前符号累加之后的距离。
对yi(1:K)符号译码
K路符号表示为: 对K个符号进行组合排列,共有2K种可能组合信息,组合形式为 可表示为msg(2K*K)。对于矩阵msg来说,可分为上下两部分msgsub1、msgsub2,每部分包含2k-1行,大小为msgsub1(2K-1*K)、msgsub2(2K-1*K),每部分的区别仅为第一个符号±1的区别,后面k-1个符号的上下两部分排列组合均一样。即通过上下分组可以区分出第一个符号是+1支路还是-1支路。
依次记录下每路符号向后逐级累加的结果,得到各路理想的叠加符号组合,可以表示为矩阵M(2K*K),即2K行K列,矩阵表示为: 第一列为第一路符号的可能排列,第二列为前两路符号叠加的可能排列,第三列为前三路符号叠加的可能排列,依次类推,第K列为全部K路符号叠加的可能排列。对于矩阵M来说,可分为上下两部分Msub1、Msub2,用于区分新进来的符号是+1还是-1。每部分包含2k-1行,大小为Msub1(2K-1*K)、Msub2(2K-1*K)。
对接收到的待译码符号序列yi(i=1~N),取前K个符号y(1:K),分别用这K个符号依次和矩阵M中的每行求测度距离,测度距离可表示为: 其中当p=2时,即为欧式距离,欧式距离是两个信号之间的真实距离,能够真实的反应实际信号和理想信号之间的距离,对应可表示为: (含义是两个向量之间的真实距离),共计2K个路径,由于矩阵Msub1、Msub2的区别仅为第一个符号的差异,因此在对K路符号求最佳路径时,每次只保留2k-1个可能路径。
比较过程为y(1:K)分别与Msub1、Msub2的第一行求测度距离,找到这两个距离中最小的一路,并记录下来这条路径的测度距离d1和msg中对应的符号序列路径path1,摒弃另外一条路径;然后再分别与Msub1、Msub2的第二行求测度距离,保留一条最佳路径,记录下来这条路径的测度距离d2和msg中对应的符号序列路径path2,摒弃另外一条路径;依次类推,直到第2k-1行。
最终将得到2k-1条最佳路径,它们的测度距离记为di,i=1~2K-1,表示为 符号序列路径记为pathi,i=1~2K-1,表示为: 由于只解析了前K个符号,因此此时每条路径的path深度为K。
对yi(K+1:N)符号译码
在对y(1:K)符号译码中完成了对前K个符号的译码,且最终得到了2k-1条最佳路径pathi及其对应的累加测度距离di。从K路符号以后,每一个符号都是K种符号叠加后的可能结果,因此对(K+1:N)个符号进行逐一序列检测,共进行N-K次序列检测过程。序列检测的步骤包括如下:
生成K路符号叠加后的可能状态即理想符号Stheory(i),i=1~2K,共计2k种。叠加后对应的表示形式为 如果用±1来表示叠加后的输出电平,则K路符号叠加后,只可能包含K+1种符号电平,依次为:±K、±(K-2)、...、±(K-2i),i=1~K/2,记为Ytheory(index),index=1~K+1。
判断当前符号yi(i=k+1~N)的前一节点状态。在对y(1:K)符号译码中得到了2k-1个pathi,即共有2k-1种状态。符号叠加过程由于第一个符号为新的符号,其余K-1符号是上一节点的符号状态,因此使用path(i-(K-1):i-1)与2k-1种可能状态比较,确定前一节点状态。
确定节点状态转移路径。每一个节点经过状态转移后又会生成2种新的状态(输入+1/-1),即2k-1种状态经过节点转移后变成2K种状态。
确定当前符号y与理想符号Stheory(i)的测度距离:
当p=2时,即为欧式距离,欧式距离是两个信号之间的真实距离,能够真实的反应实际信号和理想信号之间的距离,对应表达式为:
在一实施例中,如果复用波形是方波,则直接可以与Ytheory(index)求测度距离。
计算累加测度距离。累加的测度距离表达式记为:
m=K+1~N,n=1~2K,i=m-1;其中Dm,n表示当前符号累加之后的测度距离,m表示当前符号在整个接收符号序列中的索引,n表示累加符号的索引(共计2K种),di表示当前节点之前筛选后的累加测度距离(共计2k-1种)。实际处理中第K+1个符号对应的di值即为在上述对y(1:K)符号译码中的测度距离di;第K+2符号的di值变为D(k+1);依此类推,第N个符号的di值变为D(N-1)。dcurrent的值始终为当前符号与理想符号的测度距离。
选择最佳路径。经过上述处理后,得到2K种测度距离Dm,n和路径pathi,由于这2K种路径大体可分为2部分,即前一状态是输入+1还是输入-1。因此将2K个路径分为两部分,每部分包含2k-1条路径。对每一部分对应的每行测度距离进行两两比较,即第一部分第一行与第二部分第一行比较,第一部分第二行与第二部分第二行比较,以此类推,求出每行的最小测度距离,记录下这行对应的累加测度距离Dm,n,并标注为新的测度距离d,同时保留对应的符号路径path,对当前符号根据转移路径输入+1或者输入-1,并将相应的path的深度加1,由此又得到2k-1个测度距离及其对应的2k-1个符号路径path。
根据上述步骤依次对K+1~N的符号处理,当处理完最后一个符号yN时,已经得到了2k-1个测度距离d及其对应的2k-1个符号路径path,此时path的深度为N。对2k-1个测度距离进行从小到大的排序,找出累加距离最小的测度距离,得到其对应的索引,根据其索引,取出path对应索引的译码符号序列,即为最终的译码结果。记译码后的序列为Sdecoder(i),i=1~N,对比译码序列Sdecoder(i)和输入序列xi,可以检验译码结果是否正确,同时计算系统的误码率。
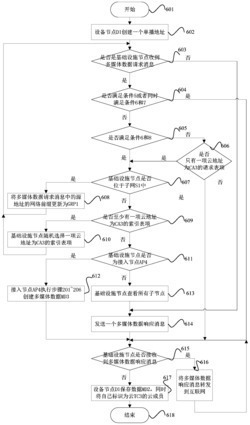
参照图4,根据本发明实施例的用于OvTDM系统的译码方法在对待译码信号进行译码之前还可包括预处理过程400,该预处理过程400包括:在402,将所接收的待译码信号与该OvTDM系统同步;该同步可以为定时同步或载波同步;在404,在该同步完成后对所接收的待译码信号做信道估计,该信道估计用于估计实际传输信道的参数;以及在406,根据取样定理对所接收的待译码信号进行数字化处理,所述数字化处理可包括对接收到的波形按照波形发送时间间隔切割。
本发明用于OvTDM系统的译码方法将译码过程分为两部分:(1:K)和(K+1:N)的译码。将前K路信号一次性处理,通过对K路信号的各级逐级累加得到新的K路理想信号,使用实际接收符号序列的前K个符号对新的理想信号依次求测度距离,保留2k-1条最佳路径,实际准确路径肯定包含在这2k-1条路径中,提高了译码的成功率。但对于截断系统,其前K-1个符号是已知的,即在通信过程中,前K-1路符号收发双方互相知晓且达成协议一致,不需要对前K-1路符号进行译码,译码的序列由第K路开始即yi(K:N),共计需要检测的符号序列个数是N-K+1;使用截断的系统,不仅能够提高译码效率,还可以降低系统设计的复杂度。
使用测度距离选择最佳路径,测度距离是表示两个信号之间的距离,在选择最佳路径时,选择测度距离最小的一条路径作为最佳路径,可以很精确的找到最接近理想信号的路径,提高了系统的译码成功率。
在比较测度距离时,如果只对比当前符号与理想符号的测度距离,随着译码深度的增加,最佳路径可能会有偏差,导致最终译码的成功率降低。由于符号叠加过程本身就是K个符号相互重叠,符号前后关联性较大,因此采取当前测度距离与前面累加的测度距离之和进行判断,这样可以随着译码深度的增加,更精确的判断最佳路径,提高译码成功率。
在本发明一具体实施例中,以方波为复用波形来说明编译码过程。设置重叠复用次数K=3,如图5所示,输入序列xi={+1 +1 -1 +1 -1 +1 +1 +1 -1 +1},经过编码后输出序列为s(t)={+1 +2 +1 +1 -1 +1 +1 +3 +1 +1}。从图5中可以看到编码输出的前两个符号不是3路信号的叠加结果。
编码后的信号经过实际信道传输,在接收端接收到的待译码符号序列会有偏差,记为yi,i=1~10。本实施例中收到的符号序列为yi={-0.0123,1.0439,0.369,0.6781,-0.5921,1.0252,0.2574,2.0371,0.8769,0.9036},将测度距离 中的p取值为2,即对应为欧式距离,以其为例说明译码步骤:
首先对前3个符号进行译码。如附图6所示,共有8种排列组合,组成一个8*3的矩阵。对每一路的符号进行向后逐级累加,形成8*3大小的矩阵。将矩阵分为两部分Msub1、Msub2,Msub1和Msub2的区别为:Msub1第一个符号为1,Msub2第一个符号为-1;可替换地,Msub1第一个符号为-1,Msub2第一个符号为1。
用yi的前三个符号分别和矩阵M的第一行和第五行,第二行和第六行...第四行和第八行进行两两欧氏距离比较大小,得到了第五行、第二行、第三行、第四行的欧氏距离,分别记为d1、d2、d3、d4。同时记录下每一行对应的路径path,即为msg的第五行、第二行、第三行和第四行。因此通过对前3个符号的译码,得到了4个可能路径,其对应的符号序列为path1:(-111),path2:(11-1),path3:(1-11),path4:(1-1-1)。
然后对4~10符号进行译码。K=3时,有a、b、c、d四种状态,对应符号为(1,1)、(1,-1)、(-1,1)、(-1,-1),每次将path序列中的最后两个符号和这四个状态进行比较,确定前一节点状态,转移路径参考节点状态转移图。根据图7的节点状态转移图,可知path1对应节点a,path2对应节点b,path3对应节点c,path4对应节点d。K=3时输入输出关系图如图8所示,从图中看到节点a为(1,1),节点b为(1,-1),节点c为(-1,1),节点d为(-1,-1)。
当K=3时,叠加后可能的符号电平为±3、±1共四种。即Ytheory(1)=-3,Ytheory(2)=-1,Ytheory(3)=1,Ytheory(4)=3。对应的理想符号表示形式分别为:
使用第四个符号y4分别与这四种电平求欧氏距离:
当path节点为a时,输入+1得到+3,即为a->a的节点转移,y4与+3求出的欧氏距离记为dcurrent(1);输入-1得到+1,即为a->b的节点转移,y4与+1求出的欧氏距离记为dcurrent(2)。
当path节点为b时,输入+1得到+1,即为b->c的节点转移,y4与+1求出的欧氏距离记为dcurrent(3);输入-1得到-1,即为b->d的节点转移,y4与-1求出的欧氏距离记为dcurrent(4)。
当path节点为c时,输入+1得到+1,即为c->a的节点转移,y4与+1求出的欧氏距离记为dcurrent(5);输入-1得到-1,即为c->b的节点转移,y4与-1求出的欧氏距离记为dcurrent(6)。
当path节点为d时,输入+1得到-1,即为d->c的节点转移,y4与-1求出的欧氏距离记为dcurrent(7);输入-1得到-3,即为d->d的节点转移,y4与-3求出的欧氏距离记为dcurrent(8)。
将当前符号的欧氏距离dcurrent与前3个符号对应的欧氏距离di分别相加得到累加距离,即D4,1=d1+dcurrent(1)、D4,2=d1+dcurrent(2);D4,3=d2+dcurrent(3)、D4,4=d2+dcurrent(4);D4,5=d3+dcurrent(5)、D4,6=d3+dcurrent(6);D4,7=d4+dcurrent(7)、D4,8=d4+dcurrent(8)。
求最佳路径。
比较D4,1与D4,5的欧氏距离大小得到D4,5欧氏距离较小,记下较小欧氏距离D4,5并标注为新的d1。由于D4,5中当前节点之前的累加欧氏距离d3对应的路径为path3序列,因此将path3深度由3增加为4,且第四个符号记为+1,得到新的符号路径序列为(1-111),记为新的path1。
比较D4,2与D4,6的欧氏距离大小得到D4,2欧氏距离较小,记下较小欧氏距离D4,2并标注为新的d2。由于D4,2中当前节点之前的累加欧氏距离d1对应的路径为path1序列,因此将path1深度由3增加为4,且第四个符号记为-1,得到新的符号路径序列为(-111-1),记为新的path2。
比较D4,3与D4,7的欧氏距离大小得到D4,3欧氏距离较小,记下较小欧氏距离D4,3并标注为新的d3。由于D4,3中当前节点之前的累加欧氏距离d2对应的路径为path2序列,因此将path2深度由3增加为4,且第四个符号记为+1,得到新的符号路径序列为(11-11),记为新的path3。
比较D4,4与D4,8的欧氏距离大小得到D4,4欧氏距离较小,记下较小欧氏距离D4,4并标注为新的d4。由于D4,4中当前节点之前的累加欧氏距离d2对应的路径为path2序列,因此将path2深度由3增加为4,且第四个符号记为-1,得到新的符号路径序列为(11-1-1),记为新的path4。
综上,得到新的可能的最佳路径为,path1:(1-111),path2:(-111-1),path3:(11-11),path4:(11-1-1)。
完成所有符号的译码。同样的根据以上方法对5~10符号进行序列检测,参照图9的K=3Trellis图,得到符号的检测过程如图10所示。最终得到的符号序列依次为:path1:(11-11-111111),path2:(11-11-11111-1),path3:(11-11-1111-11),path4:(11-11-1111-1-1),对比path1、path2、path3和path4可发现,随着译码深度的加深,路径存储器中初始节点相同的路径逐渐统一,因此在译码过程中可将path中相同的路径先进行输出,以节省存储空间。
其对应的欧氏距离依次为d1=3.5071,d2=3.0049,d3=2.4493,d4=3.6040,对这四个距离比较大小,得到d3的欧氏距离最小,则对应的选择path3为输出符号序列。即输出的符号序列为Sdecode=(11-11-1111-11),对比输入的符号序列xi={+1+1-1+1-1+1+1+1-1+1},两者序列完全一致,则译码结果正确。
本发明用于OvTDM系统的译码装置,包括:用于接收待译码符号序列的单元,所述待译码符号序列包括N个符号;用于将接收到的所述待译码符号序列分为第一符号序列(1:K)和第二符号序列(K+1:N)的单元;用于计算所述第一符号序列(1:K)与对应的2K路理想叠加符号序列中的每路理想叠加符号序列之间的第一距离,根据所述第一距离得到与2k-1个较小距离对应的路径的单元;用于根据所述与2k-1个较小距离对应的路径对所述第二符号序列(K+1:N)中的每个符号逐个进行序列检测,计算每个符号与对应的2K路理想符号序列中的每路理想符号序列之间的第二距离,在对最后一个符号序列检测后根据所述第二距离得到对应于最小距离的理想符号序列的单元;用于将所述对应于最小距离的理想符号序列作为输出符号序列的单元。
在一实施例中,所述第一距离和所述第二距离均为测度距离。
在一实施例中,所述第二距离为当前符号累加之后的距离。
根据本发明实施例的用于OvTDM系统的译码装置还包括用于对待译码符号序列进行预处理的预处理单元,该预处理单元包括:同步器,用于将所接收的待译码信号与该系统同步,该同步可以为定时同步或载波同步;信道估计器,用于在该同步完成后对所接收的待译码信号做信道估计,该信道估计用于估计实际传输信道的参数;以及数字化处理器,用于根据取样定理对所接收的待译码信号进行数字化处理。
本发明用于OvTDM系统的译码装置将译码过程分为两部分:(1:K)和(K+1:N)的译码。将前K路信号一次性处理,通过对K路信号的各级逐级累加得到新的K路理想信号,使用实际接收符号序列的前K个符号对新的理想信号依次求测度距离,保留2k-1条最佳路径,实际准确路径肯定包含在这2k-1条路径中,提高了译码的成功率。但对于截断系统,其前K-1个符号是已知的,即在通信过程中,前K-1路符号收发双方互相知晓且达成协议一致,不需要对前K-1路符号进行译码,译码的序列由第K路开始即yi(K:N),共计需要检测的符号序列个数是N-K+1;使用截断的系统,不仅能够提高译码效率,还可以降低系统设计的复杂度。
使用测度距离选择最佳路径,测度距离是表示两个信号之间的距离,在选择最佳路径时,选择测度距离最小的一条路径作为最佳路径,可以很精确的找到最接近理想信号的路径,提高了系统的译码成功率。
在比较测度距离时,如果只对比当前符号与理想符号的测度距离,随着译码深度的增加,最佳路径可能会有偏差,导致最终译码的成功率降低。由于符号叠加过程本身就是K个符号相互重叠,符号前后关联性较大,因此采取当前测度距离与前面累加的测度距离之和进行判断,这样可以随着译码深度的增加,更精确的判断最佳路径,提高译码成功率。
一般情况下,由于待译码的数据长度较长,且随着译码深度的加深,累加距离越来越大,系统若将所有数据全部译码完成后再进行译码输出,较消耗系统资源,因此对于路径的存储容量和距离的存储采取较优的处理方法。一般选取路径存储长度为4K~5K,此时如果路径存储器已经存满而译码判决输出还未进行可强行判决输出,将具有相同路径的初始节点先进行输出;随着译码深度的加深,累加距离也会越来越大,可将累加距离存储为相对距离,即定义一个参考距离,其取值根据不同的系统而定,距离存储记录的是每条路径的第二距离相对于参考距离的相对值,在进行最佳路径的筛选时通过相对距离进行比较。
本发明上述实施例的用于OvTDM系统的译码装置可结合于OvTDM系统中。
虽然本发明已参照当前的具体实施例来描述,但是本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,在没有脱离本发明精神的情况下还可作出各种等效的变化或替换,因此,只要在本发明的实质精神范围内对上述实施例的变化、变型都将落在本申请的权利要求书的范围内。
译码方法、装置及其系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0