






专利摘要
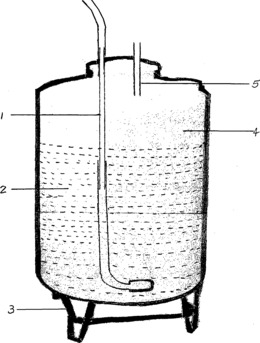
物体回位系统包括:物体1、放置面2、过绳孔3、牵引绳4、卷绳筒5、电动机6和控制模块7;工作原理为:首先物体1立于过绳孔3上,控制模块7控制电动机6向缠绕的反方向转动以放松牵引绳4;当外力足够强地加到物体1的侧面时,会使物体1倾倒,偏离原来的位置;然后控制模块7控制电动机6向原来放松牵引绳的旋转方向相反的方向转动,电动机6就带动卷绳筒5卷紧牵引绳4,使牵引绳4通过过绳孔3牵动物体1回到过绳孔附近并立起到原来状态。
权利要求
1.物体回位系统,其特征在于,它包括:物体1、放置面2、过绳孔3、牵引绳4、卷绳筒5、电动机6和控制模块7;物体1立放在放置面2上或者离开放置位置倒下;过绳孔3位于放置面2上;牵引绳4穿过放置面2上的过绳孔3,一端系于物体1的底面上,另一端系于卷绳筒5上;卷绳筒5与电动机6的轴端相连,并在其上固定并缠绕牵引绳4;电动机6受控制模块7的控制;控制模块7用来控制电动机6的双向的转动和停止;该物体回位系统的运行方式为:首先物体1立于过绳孔3上,控制模块7控制电动机6向缠绕的反方向转动以放松牵引绳4;当外力足够强地加到物体1的侧面时,会使物体1倾倒,偏离原来的位置;然后控制模块7控制电动机6向原来放松牵引绳4的旋转方向相反的方向转动,电动机6就带动卷绳筒5卷紧牵引绳4,使牵引绳4通过过绳孔3牵动物体1回到过绳孔3附近并立起到原来状态。
2.根据权利要求1所述的物体回位系统,物体1是多个,与其相关的部件也变为多个,形成这样的组合扩展;其特征在于:多个物体1放在放置面2上的不同位置,多个物体1对应着同样数量的过绳孔3、同样数量的牵引绳4、同样数量的卷绳筒5和同样数量的电动机6,控制模块7可以是多个也可以合并为1个;因而在全部或部分物体1受外力倾倒后,可以通过上述的控制模块7的控制使与倾倒的物体1是同一套的电动机6带动同一套的卷绳筒5卷紧同一套的牵引绳4,而使同一套的倾倒的物体1都复位立起。
3.根据权利要求1所述的和权利要求2所述的物体回位系统,增加固定装置8;其特征在于:固定装置8放置在牵引绳4的可接触位置,用固定装置8限定牵引绳4的转向角度,这样电动机6的位置不仅可以在放置面2的下边,也可以放在其它位置;也可以增加多个固定装置8,和所述的包含多个物体1的组合扩展一起构成包含多个固定装置8的扩展的物体回位系统。
4.根据权利要求1所述的和权利要求2所述的物体回位系统,增加站立传感器9;其特征在于:站立传感器9放置于站立的物体1的下面、侧方或上方;站立传感器9与控制模块7电相联;包含站立传感器9的物体回位系统的运行方式为:物体1立于过绳孔3上,控制模块7控制电动机6向原来放松牵引绳4的旋转方向相反的方向转动以放松牵引绳4;当外力足够强地加到物体1的侧面时,会使物体1倾倒,偏离原来的位置;则站立传感器9检测到物体1倾倒,并把这个检测信号传给控制模块;控制模块7控制电动机6向原来放松牵引绳4的旋转方向相反的方向转动,电动机6就带动卷绳筒5卷紧牵引绳4,使牵引绳4通过过绳孔3牵动物体1回到过绳孔3附近再立起到原来状态;也可以增加多个站立传感器9,和所述的包含多个物体1的组合扩展一起构成包含多个站立传感器9的扩展的物体回位系统。
5.根据权利要求1所述的和权利要求2所述的物体回位系统,增加投掷物体10和投掷传感器11;其特征在于:投掷物体10用来投掷过来给物体1施加一个外力;投掷传感器11设置在物体1的前方,也就是投掷物体10投掷过来的方向;投掷传感器11与控制模块7电相联;因此,增加投掷物体10和投掷传感器11的物体回位系统的运行方式为:物体1立于过绳孔3上,控制模块7控制电动机6转动以放松牵引绳4;当投掷物体10向物体1投掷时;则投掷传感器11给控制模块7发出已投掷信号,控制模块7进行接续控制动作;所增加的投掷物体10和投掷传感器11,和所述的包含多个物体1的组合扩展一起构成包含投掷物体10和投掷传感器11的扩展的物体回位系统。
6.根据权利要求1所述的、权利要求2所述的、权利要求4所述的和权利要求5所述的物体回位系统,包含站立传感器9、投掷物体10和投掷传感器11;其特征在于:物体1立于过绳孔3上,控制模块7控制电动机6转动以放松牵引绳4;当投掷物体10向物体1投掷时,投掷传感器11会检测到已投掷的情况,控制模块7会记录已投掷的情况;如投掷物体10使物体1倾倒,站立传感器9会检测到已倾倒情况,则控制模块7也会记录到已倾倒情况;如物体1已倾倒,则控制模块7控制电动机6向原来放松牵引绳4的旋转方向相反的方向转动,电动机6就带动卷绳筒5卷紧牵引绳4,使牵引绳4通过过绳孔3牵动物体1回到过绳孔3附近并立起到原来状态,控制模块7还根据已投掷的情况和已倾倒情况判断投掷的效果;也可以增加多个站立传感器9,还有投掷物体10和投掷传感器11,和所述的包含多个物体1的组合扩展一起构成包含多个站立传感器9、投掷物体10和投掷传感器11的扩展的物体回位系统。
7.根据权利要求1所述的、权利要求2所述的、权利要求4所述的、权利要求5所述的和权利要求6的物体回位系统,增加显示模块12和通讯模块13;其特征在于:显示模块12和通讯模块13都与控制模块7相连;物体1立于过绳孔3上,控制模块7控制电动机6向缠绕的反方向转动以放松牵引绳4;当投掷物体10向物体1投掷时,投掷传感器11会检测到已投掷的情况,控制模块7会记录已投掷的情况;如投掷物体10使物体1倾倒,站立传感器9会检测到已倾倒情况,则控制模块7也会记录到已倾倒情况;如物体1已倾倒,则控制模块7控制电动机6向原来放松牵引绳4的旋转方向相反的方向转动,电动机6就带动卷绳筒5卷紧牵引绳4,使牵引绳4通过过绳孔3牵动物体1回到过绳孔3附近并立起到原来状态,控制模块7还根据已投掷的情况和已倾倒情况判断投掷的效果,投掷情况在显示模块12上进行显示,投掷情况和设置情况通过通讯模块13联网与外部通信;所增加的显示模块12和通讯模块13,还有站立传感器9、投掷物体10和投掷传感器11,和所述的包含多个物体1的组合扩展一起构成包含多个站立传感器9、投掷物体10、投掷传感器11、显示模块12和通讯模块13的扩展的物体回位系统。
8.根据权利要求1所述的到权利要求7所述的物体回位系统,其特征在于:物体1是保龄球瓶。
9.根据权利要求1所述的到权利要求8所述的物体回位系统,其特征在于:投掷物体10是保龄球。
10.根据权利要求1所述的到权利要求9所述的物体回位系统,包含固定装置8、站立传感器9、投掷物体10、投掷传感器11、显示模块12和通讯模块13;其特征在于,物体1是保龄球瓶,投掷物体10是保龄球;放置面2上方有空间用来排放保龄球瓶1,放置面2上方的空间两侧有封闭部分,放置面2上方的空间的上方放置显示模块12;保龄球瓶1以多排的方式排放在放置面2上,前排的保龄球瓶1的数量比后排的保龄球瓶1的数量多,站立传感器9和过绳孔3位于排放好的保龄球瓶1下;封闭部分里面放置卷绳筒5、电动机6和控制模块7;牵引绳4的一端连在保龄球瓶1的底部,另一端连在卷绳筒5;投掷传感器11放置在封闭部分的外侧;微处理器和多个驱动模块L298连接到一起,构成控制模块7;站立传感器9使用包含TCRT5000红外器件的红外对管传感器,与微处理器的数字I/O口相联;投掷传感器11由多个包含TCRT5000红外器件的红外对管传感器垂直排列组成,形成一个监测面,与微处理器的数字I/O口相联;电动机6使用直流减速电动机,与对应的L298电机驱动模块相联;通讯模块13是用WIFI模块,与微处理器相连;显示模块12使用液晶触摸模块;因此,微处理器的程序的运行方式为:第一步,让电动机6按放松牵引绳3的方向转动;第二步,取入投掷传感器11的所有传感器的输出信号;第三步,判断是否有一个或多个表示检测到保龄球10的传感器输出信号,如为是继续进行,如为否,返回到第二步;第四步,取入各个站立传感器7的输出信号;第五步,确定哪些是已倾倒的保龄球瓶1;第六步,使已倾倒的保龄球瓶1对应的电动机6向收紧牵引绳4的方向转动;第七步,取入已倾倒的保龄球瓶1的对应的站立传感器7的输出信号;第八步,判断已倾倒的保龄球瓶1是不是已站立,如为是继续进行,如为否,返回到第六步;第九步,分析倾倒情况并计分;第十步,显示相关情况;第十一步,与外部通信。
说明书
技术领域
本发明属于自动化设备,涉及一种智能物体回位系统与基于这种物体回位系统的用于保龄球运动的球瓶自动摆放系统。
背景技术
保龄球是一种有益的体育运动,为大众而喜爱。但是,所需要的条件是比较高的:要有专业性场馆,要有专门的保龄球设备;所以限制了应用。注意到这样的情况:保龄球设备的庞大和复杂主要是由于保龄球的摆放与计分的要求。为此,本发明提出一种物体回位系统与基于物体回位系统的智能保龄球瓶自动摆放系统。
发明内容
所发明的物体回位系统,由物体1、放置面2、过绳孔3、牵引绳4、卷绳筒5、电动机6和控制模块7组成;物体1立放在放置面2上或者离开放置位置倒下;过绳孔3位于放置面2上;牵引绳4穿过放置面2上的过绳孔3,一端系于物体1的底面上,另一端系于卷绳筒5上;卷绳筒5与电动机6的轴端相连,并在其上固定并缠绕牵引绳4;电动机6受控制模块7的控制;控制模块7用来控制电动机6的双向的转动和停止;该物体回位系统的运行方式为:首先物体1立于过绳孔3上,控制模块7控制电动机6向缠绕的反方向转动以放松牵引绳4;当外力足够强地加到物体1的侧面时,会使物体1倾倒,偏离原来的位置;然后控制模块7控制电动机6向原来放松牵引绳4的旋转方向相反的方向转动,电动机6就带动卷绳筒5卷紧牵引绳4,使牵引绳4通过过绳孔3牵动物体1回到过绳孔3附近并立起到原来状态。
根据所述的物体回位系统,物体1是多个,与其相关的部件也变为多个,形成这样的组合扩展:多个物体1放在放置面2上的不同位置,多个物体1对应着同样数量的过绳孔3、同样数量的牵引绳4、同样数量的卷绳筒5和同样数量的电动机6,控制模块7可以是多个也可以合并为1个;因而在全部或部分物体1受外力倾倒后,可以通过上述的控制模块7的控制使与倾倒的物体1是同一套的电动机6带动同一套的卷绳筒5卷紧同一套的牵引绳4,而使同一套的倾倒的物体1都复位立起。
根据所述的物体回位系统,增加固定装置8;固定装置8放置在牵引绳4的可接触位置,用固定装置8限定牵引绳4的转向角度,这样电动机6的位置不仅可以在放置面2的下边,也可以放在其它位置;也可以增加多个固定装置8,和所述的包含多个物体1的组合扩展一起构成包含多个固定装置8的扩展的物体回位系统。
根据所述的物体回位系统,增加站立传感器9,用来检测物体1是不是站立;站立传感器9放置于站立的物体1的下面、侧方或上方;站立传感器9与控制模块7电相联;包含站立传感器9的物体回位系统的运行方式为:物体1立于过绳孔3上,控制模块7控制电动机6向原来放松牵引绳4的旋转方向相反的方向转动以放松牵引绳4;当外力足够强地加到物体1的侧面时,会使物体1倾倒,偏离原来的位置;则站立传感器9检测到物体1倾倒,并把这个检测信号传给控制模块7;控制模块7控制电动机6向原来放松牵引绳4的旋转方向相反的方向转动,电动机6就带动卷绳筒5卷紧牵引绳4,使牵引绳4通过过绳孔3牵动物体1回到过绳孔3附近再立起到原来状态;也可以增加多个站立传感器9,和所述的包含多个物体1的组合扩展一起构成包含多个站立传感器9的扩展的物体回位系统。
根据所述的物体回位系统,增加投掷物体10和投掷传感器11;投掷物体10用来投掷过来给物体1施加一个外力;投掷传感器11设置在物体1的前方,也就是投掷物体10投掷过来的方向;投掷传感器11与控制模块7电相联;因此,增加投掷物体10和投掷传感器11的物体回位系统的运行方式为:物体1立于过绳孔3上,控制模块7控制电动机6转动以放松牵引绳4;当投掷物体10向物体1投掷时;则投掷传感器11给控制模块7发出已投掷信号,控制模块7进行接续控制动作;所增加的投掷物体10和投掷传感器11,和所述的包含多个物体1的组合扩展一起构成包含投掷物体10和投掷传感器11的扩展的物体回位系统。
根据所述的包含站立传感器9、投掷物体10和投掷传感器11的物体回位系统,其运行方式为:物体1立于过绳孔3上,控制模块7控制电动机6转动以放松牵引绳4;当投掷物体10向物体1投掷时,投掷传感器11会检测到已投掷的情况,控制模块7会记录已投掷的情况;如投掷物体10使物体1倾倒,站立传感器9会检测到已倾倒情况,则控制模块7也会记录到已倾倒情况;如物体1已倾倒,则控制模块7控制电动机6向原来放松牵引绳4的旋转方向相反的方向转动,电动机6就带动卷绳筒5卷紧牵引绳4,使牵引绳4通过过绳孔3牵动物体1回到过绳孔3附近并立起到原来状态,控制模块7还根据已投掷的情况和已倾倒情况判断投掷的效果;也可以增加多个站立传感器9,还有投掷物体10和投掷传感器11,和所述的包含多个物体1的组合扩展一起构成包含多个站立传感器9、投掷物体10和投掷传感器11的扩展的物体回位系统。
根据所述的包含站立传感器9、投掷物体10和投掷传感器11的物体回位系统,还可以增加显示模块12和通讯模块13;显示模块12和通讯模块13都与控制模块7相连;所构成的物体回位系统的运行方式为:物体1立于过绳孔3上,控制模块7控制电动机6向缠绕的反方向转动以放松牵引绳4;当投掷物体10向物体1投掷时,投掷传感器11会检测到已投掷的情况,控制模块7会记录已投掷的情况;如投掷物体10使物体1倾倒,站立传感器9会检测到已倾倒情况,则控制模块7也会记录到已倾倒情况;如物体1已倾倒,则控制模块7控制电动机6向原来放松牵引绳4的旋转方向相反的方向转动,电动机6就带动卷绳筒5卷紧牵引绳4,使牵引绳4通过过绳孔3牵动物体1回到过绳孔3附近并立起到原来状态,控制模块7还根据已投掷的情况和已倾倒情况判断投掷的效果,投掷情况在显示模块12上进行显示,投掷情况和设置情况通过通讯模块13联网与外部通信;所增加的显示模块12和通讯模块13,还有站立传感器9、投掷物体10和投掷传感器11,和所述的包含多个物体1的组合扩展一起构成包含多个站立传感器9、投掷物体10、投掷传感器11、显示模块12和通讯模块13的扩展的物体回位系统。
在上述的各种物体回位系统中,物体1是保龄球瓶;因而所述的物体回位系统和扩展的物体回位系统具体为单个或多个保龄球瓶1的自动摆放系统。
在上述的包含投掷物体10的各种物体回位系统中,投掷物体10是保龄球。
根据所述的包含站立传感器9、投掷物体10、投掷传感器11、显示模块12和通讯模块13的物体回位系统,物体1是保龄球瓶,投掷物体10是保龄球;放置面2上方有空间用来排放保龄球瓶1,放置面2上方的空间两侧有封闭部分,放置面2上方的空间的上方放置显示模块12;保龄球瓶1以多排的方式排放在放置面2上,前排的保龄球瓶1的数量比后排的保龄球瓶1的数量多,站立传感器9和过绳孔3位于排放好的保龄球瓶1下;封闭部分里面放置卷绳筒5、电动机6和控制模块7;牵引绳4的一端连在保龄球瓶1的底部,另一端连在卷绳筒5;投掷传感器11放置在封闭部分的外侧;微处理器和多个驱动模块L298连接到一起,构成控制模块7;站立传感器9使用包含TCRT5000红外器件的红外对管传感器,与微处理器的数字I/O口相联;投掷传感器11由多个包含TCRT5000红外器件的红外对管传感器垂直排列组成,形成一个监测面,与微处理器的数字I/O口相联;电动机6使用直流减速电动机,与对应的L298电机驱动模块相联;通讯模块13是用WIFI模块,与微处理器相连;显示模块12使用液晶触摸显示屏;因此,微处理器的程序的运行方式为:第一步,让电动机6按放松牵引绳3的方向转动;第二步,取入投掷传感器11的所有传感器的输出信号;第三步,判断是否有一个或多个表示检测到保龄球10的传感器输出信号,如为是继续进行,如为否,返回到第二步;第四步,取入各个站立传感器7的输出信号;第五步,确定哪些是已倾倒的保龄球瓶1;第六步,使已倾倒的保龄球瓶1对应的电动机6向收紧牵引绳4的方向转动;第七步,取入已倾倒的保龄球瓶1的对应的站立传感器7的输出信号;第八步,判断已倾倒的保龄球瓶1是不是已站立,如为是继续进行,如为否,返回到第六步;第九步,分析倾倒情况并计分;第十步,显示相关情况;第十一步,与外部通信。
所提出的物体回位系统与智能保龄球瓶自动摆放系统,能够实现自动地摆放物体与保龄球瓶,结构相对简单,有比较高的智能性;还可以通信以形成社交网络,具备实用性和娱乐性。
附图说明
附图1是本发明所述的牵引绳3放松状态的物体回位系统的示意图;
附图2是本发明所述的物体1已倾倒的物体回位系统的示意图;
附图3是本发明所述的倾倒的物体1已回位的物体回位系统的示意图;
附图4是本发明所述的增加固定装置8的物体回位系统;
附图5是本发明所述的增加站立传感器9的物体回位系统;
附图6是本发明所述的增加投掷物体10和投掷传感器11的物体回位系统的示意图;
附图7是本发明所述包含站立传感器9、投掷物体10和投掷传感器11的物体回位系统的示意图;
附图8是本发明所述包含站立传感器9、投掷物体10、投掷传感器11、显示模块12和通讯模块13的物体回位系统的示意图;
附图9是本发明所述包含站立传感器9、保龄球10、投掷传感器11、显示模块12和通讯模块13的物体回位系统的一种具体结构的示意图;
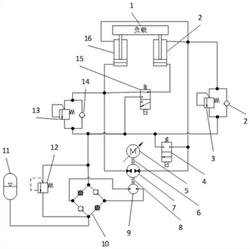
附图10是本发明所述包含站立传感器9、保龄球10、投掷传感器11、显示模块12和通讯模块13的物体回位系统的一种电气原理的示意图;
附图11是本发明所述包含站立传感器9、保龄球10、投掷传感器11、显示模块12和通讯模块13的物体回位系统的一种具体结构的程序流程示意图。
具体实施方式
具体实施方式一
参照附图1、附图2和附图3说明本实施方式,本实施方式中,所发明的物体回位系统,由物体1、放置面2、过绳孔3、牵引绳4、卷绳筒5、电动机6和控制模块7组成;物体1立放在放置面2上或者离开放置位置倒下;过绳孔3位于放置面2上;牵引绳4穿过放置面2上的过绳孔3,一端系于物体1的底面上,另一端系于卷绳筒5上;卷绳筒5与电动机6的轴端相连,并在其上固定并缠绕牵引绳4;电动机6受控制模块7的控制;控制模块7用来控制电动机6的双向的转动和停止;该物体回位系统的运行方式为:首先物体1立于过绳孔3上,控制模块7控制电动机6向缠绕的反方向转动以放松牵引绳4;当外力足够强地加到物体1的侧面时,会使物体1倾倒,偏离原来的位置;然后控制模块7控制电动机6向原来放松牵引绳4的旋转方向相反的方向转动,电动机6就带动卷绳筒5卷紧牵引绳4,使牵引绳4通过过绳孔3牵动物体1回到过绳孔附近并立起到原来状态。
具体实施方式二
参照附图1、附图2和附图3说明本实施方式,本实施方式是在具体实施方式一基础上的扩展;本实施方式中,根据所述的物体回位系统,物体1是多个,与其相关的部件也变为多个,形成这样的组合扩展:多个物体1放在放置面2上的不同位置,多个物体1对应着同样数量的过绳孔3、同样数量的牵引绳4、同样数量的卷绳筒5和同样数量的电动机6,控制模块7可以是多个也可以合并为1个;因而在全部或部分物体1受外力倾倒后,可以通过上述的控制模块7的控制使与倾倒的物体1是同一套的电动机6带动同一套的卷绳筒5卷紧同一套的牵引绳4,而使同一套的倾倒的物体1都复位立起。
具体实施方式三
参照附图1、附图2、附图3和附图4说明本实施方式,本实施方式是在具体实施方式一和具体实施方式二基础上的扩展;本实施方式中,根据所述的物体回位系统,增加固定装置8;固定装置8放置在牵引绳4的可接触位置,用固定装置8限定牵引绳4的转向角度,这样电动机6的位置不仅可以在放置面2的下边,也可以放在其它位置;也可以增加多个固定装置8,和所述的包含多个物体1的组合扩展一起构成包含多个固定装置8的扩展的物体回位系统。
具体实施方式四
参照附图1、附图2、附图3和附图5说明本实施方式,本实施方式是在具体实施方式一和具体实施方式二基础上的扩展;本实施方式中,根据所述的物体回位系统,增加站立传感器9,用来检测物体1是不是站立;站立传感器9放置于站立的物体1的下面、侧方或上方;站立传感器9与控制模块7电相联;包含站立传感器9的物体回位系统的运行方式为:物体1立于过绳孔3上,控制模块7控制电动机6向原来放松牵引绳4的旋转方向相反的方向转动以放松牵引绳4;当外力足够强地加到物体1的侧面时,会使物体1倾倒,偏离原来的位置;则站立传感器9检测到物体1倾倒,并把这个检测信号传给控制模块;控制模块7控制电动机6向原来放松牵引绳4的旋转方向相反的方向转动,电动机6就带动卷绳筒5卷紧牵引绳4,使牵引绳4通过过绳孔3牵动物体1回到过绳孔3附近再立起到原来状态;也可以增加多个站立传感器9,和所述的包含多个物体1的组合扩展一起构成包含多个站立传感器9的扩展的物体回位系统。
具体实施方式五
参照附图1、附图2、附图3和附图6说明本实施方式,本实施方式是在具体实施方式一和具体实施方式二基础上的扩展;本实施方式中,根据所述的物体回位系统,增加投掷物体10和投掷传感器11;投掷物体10用来投掷过来给物体1施加一个外力;投掷传感器11设置在物体1的前方,也就是投掷物体10投掷过来的方向;投掷传感器11与控制模块7电相联;因此,增加投掷物体10和投掷传感器11的物体回位系统的运行方式为:物体1立于过绳孔3上,控制模块7控制电动机6转动以放松牵引绳4;当投掷物体10向物体1投掷时;则投掷传感器11给控制模块7发出已投掷信号,控制模块7进行接续控制动作;所增加的投掷物体10和投掷传感器11,和所述的包含多个物体1的组合扩展一起构成包含投掷物体10和投掷传感器11的扩展的物体回位系统。
具体实施方式六
参照附图1、附图2、附图3和附图7说明本实施方式,本实施方式是在具体实施方式一、具体实施方式二、具体实施方式四和具体实施方式五基础上的扩展;本实施方式中,根据所述的包含站立传感器9、投掷物体10和投掷传感器11的物体回位系统,其运行方式为:物体1立于过绳孔3上,控制模块7控制电动机6转动以放松牵引绳4;当投掷物体10向物体1投掷时,投掷传感器11会检测到已投掷的情况,控制模块7会记录已投掷的情况;如投掷物体10使物体1倾倒,站立传感器9会检测到已倾倒情况,则控制模块7也会记录到已倾倒情况;如物体1已倾倒,则控制模块7控制电动机6向原来放松牵引绳的旋转方向相反的方向转动,电动机6就带动卷绳筒5卷紧牵引绳4,使牵引绳4通过过绳孔3牵动物体1回到过绳孔3附近并立起到原来状态,控制模块7还根据已投掷的情况和已倾倒情况判断投掷的效果;也可以增加多个站立传感器9,还有投掷物体10和投掷传感器11,和所述的包含多个物体1的组合扩展一起构成包含多个站立传感器9、投掷物体10和投掷传感器11的扩展的物体回位系统。
具体实施方式七
参照附图1、附图2、附图3和附图8说明本实施方式,本实施方式是在具体实施方式一、具体实施方式二、具体实施方式四、具体实施方式五和具体实施方式六基础上的扩展;本实施方式中,根据所述的包含站立传感器9、投掷物体10和投掷传感器11的物体回位系统,还可以增加显示模块12和通讯模块13;显示模块12和通讯模块13都与控制模块7相连;所构成的物体回位系统的运行方式为:物体1立于过绳孔3上,控制模块7控制电动机6向缠绕的反方向转动以放松牵引绳4;当投掷物体10向物体1投掷时,投掷传感器11会检测到已投掷的情况,控制模块7会记录已投掷的情况;如投掷物体10使物体1倾倒,站立传感器9会检测到已倾倒情况,则控制模块7也会记录到已倾倒情况;如物体1已倾倒,则控制模块7控制电动机6向原来放松牵引绳4的旋转方向相反的方向转动,电动机6就带动卷绳筒5卷紧牵引绳4,使牵引绳4通过过绳孔3牵动物体1回到过绳孔3附近并立起到原来状态,控制模块7还根据已投掷的情况和已倾倒情况判断投掷的效果,投掷情况在显示模块12上进行显示,投掷情况和设置情况通过通讯模块13联网与外部通信;所增加的显示模块12和通讯模块13,还有站立传感器9、投掷物体10和投掷传感器11,和所述的包含多个物体1的组合扩展一起构成包含多个站立传感器9、投掷物体10、投掷传感器11、显示模块12和通讯模块13的扩展的物体回位系统。
具体实施方式八
参照附图1到附图8说明本实施方式,本实施方式是在具体实施方式一到具体实施方式七基础上的扩展;本实施方式中,在上述的各种物体回位系统中,物体1是保龄球瓶;因而所述的物体回位系统和扩展的物体回位系统具体为单个或多个保龄球瓶1的自动摆放系统。
具体实施方式九
参照附图1到附图8说明本实施方式,本实施方式是在具体实施方式一到具体实施方式八基础上的扩展;本实施方式中,在上述的包含投掷物体10的各种物体回位系统中,投掷物体10是保龄球。
具体实施方式十
参照附图1到附图11说明本实施方式,本实施方式是在具体实施方式一到具体实施方式九基础上的扩展;本实施方式中,根据所述的包含固定装置8、站立传感器9、投掷物体10、投掷传感器11、显示模块12和通讯模块13的物体回位系统,物体1是保龄球瓶,投掷物体10是保龄球;放置面2上方有空间用来排放保龄球瓶1,放置面2上方的空间两侧有封闭部分,放置面2上方的空间的上方放置显示模块12;保龄球瓶1以多排的方式排放在放置面2上,前排的保龄球瓶1的数量比后排的保龄球瓶1的数量多,站立传感器9和过绳孔3位于排放好的保龄球瓶1下;封闭部分里面放置卷绳筒5、电动机6和控制模块7;牵引绳4的一端连在保龄球瓶1的底部,另一端连在卷绳筒5;投掷传感器11放置在封闭部分的外侧;微处理器和多个驱动模块L298连接到一起,构成控制模块7;站立传感器9使用包含TCRT5000红外器件的红外对管传感器,与微处理器的数字I/O口相联;投掷传感器11由多个包含TCRT5000红外器件的红外对管传感器垂直排列组成,形成一个监测面,与微处理器的数字I/O口相联;电动机6使用直流减速电动机,与对应的L298电机驱动模块相联;通讯模块13是用WIFI模块,与微处理器相连;显示模块12使用液晶触摸显示屏;因此,微处理器的程序的运行方式为:第一步,让电动机6按放松牵引绳3的方向转动;第二步,取入投掷传感器11的所有传感器的输出信号;第三步,判断是否有一个或多个表示检测到保龄球10的传感器输出信号,如为是继续进行,如为否,返回到第二步;第四步,取入各个站立传感器7的输出信号;第五步,确定哪些是已倾倒的保龄球瓶1;第六步,使已倾倒的保龄球瓶1对应的电动机6向收紧牵引绳4的方向转动;第七步,取入已倾倒的保龄球瓶1的对应的站立传感器7的输出信号;第八步,判断已倾倒的保龄球瓶1是不是已站立,如为是继续进行,如为否,返回到第六步;第九步,分析倾倒情况并计分;第十步,显示相关情况;第十一步,与外部通信。
智能物体回位系统与保龄球瓶自动摆放系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


动态评分
0.0