







专利摘要
本发明的目的是提供一种仿真移动玩具狗,价格便宜,行走自然,并且能实现前进和后退两种行动方式,更接近于真实的狗。为达到所述效果,本发明仿真移动玩具狗,包括躯干以及头部,躯干上设有腿部,其特征在于,腿部包括通过电机连接在躯干上的腿根部,所述腿根部和腿前肢之间通过电流变液关节连接,所述电机和电流变液关节均连接于躯干中的中控芯片。由于采用了所述技术方案,本发明仿真移动玩具狗的行动模式更接近于真实的小狗,同时除了行走以外还能够进行奔跑的模仿,关节部分的转动也更近似于真实的小狗。
说明书
技术领域
本发明涉及一种玩具,尤其涉及仿真移动玩具狗。
背景技术
历经千年的变更,狗已经成为人类的宠物或无功利性质的同伴。人们乐于接受一个永远高兴看见他的好友,并且这个好友没有任何功利性要求。现在人们也很愿意养一只狗作为自己的朋友。但是由于生活环境如一些小区禁止宠物或者自身关系如过敏性体质或者家中有小孩,害怕宠物狗对孩子造成伤害如抓伤或者传染疾病就无法养一只狗了。这样就非常可惜。为了满足这部分人的需求,人们也设计了各种玩具狗,现有技术的玩具狗基本包括两类,一种是毛绒玩具,这一类的模样和狗很像,但是不会自己动,一般给低龄小孩玩耍。还有一种是智能狗,其实质上就是机器狗,这个以索尼AIBO为典范。AIBO的英文意思为“人工智能机器人”(Artificial Intelligence roBOt),但其实是一款机器狗。它能支持高达180条的语音指令,特别是它的视觉系统得到了进一步的改进,提高了图像识别能力,嵌入了模式识别功能。这种功能的应用之一就是使用15块“AIBO卡”与用户交流。该卡以图像形式来表达“拍照”、“移动方向”、“充电”等命令。AIBO机器狗通过内置的CMOS型固体摄像元件看到AIBO卡后,就根据图像模式开始行动。它能够执行印在专门卡片上的“坐下”、“拍照”等15种指令,还能找到骨头形附件,叼在嘴里。可以说几乎和真实的狗一样聪明,但是其缺点在于第一,价格非常昂贵,普通人难以承担。而且外形并不讨人喜欢,怎么看都是一只机器,难以给人有喜爱狗的亲密感觉。尤其是现有技术中玩具狗的脚步机械感非常强,行动依靠机械关节前进,非常不自然,而且无法后退,也无法奔跑。
发明内容
本发明的目的是提供一种仿真移动玩具狗,价格便宜,行走自然,并且能实现前进和后退两种行动方式,更接近于真实的狗。
为达到所述效果,本发明仿真移动玩具狗,包括躯干以及头部,躯干上设有腿部,腿部包括通过电机连接在躯干上的的腿根部,所述腿根部和腿前肢之间通过活动关节连接,所述电机和活动关节均连接于躯干中的中控芯片。
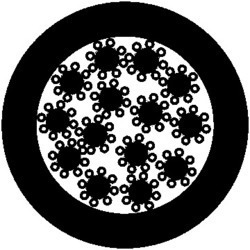
优选的,所述活动关节包括连接在腿根部的内动圈,所述内动圈外侧套接有连接在腿前肢上的外动圈,所述外动圈内设有电流变液槽,所述电流变液槽上隔有多个隔间。通过这样的结构,本发明通过电流变液的液态、固态的变化实现内动圈和外动圈之间的相对移动或固定。隔间的结构也使得电流变液在运动过程中不会过于混乱,影响液态-固态转化过程或者时间。
优选的,所述电流变液槽内所设隔间数量为4个。因为电流变液槽数量过多会导致成本过高,也不会由于电流变液槽数量不足导致无法及时停止内动圈和外动圈之间的相对运动。
优选的,所述电机为双向电机。这样就能在驱动电路的作用下实现前进和后退的两种行动方式。
由于采用了所述技术方案,本发明仿真移动玩具狗的行动模式更接近于真实的小狗,同时除了行走以外还能够进行奔跑的模仿,关节部分的转动也更近似于真实的小狗。
附图说明
下面结合附图对本发明作进一步说明:
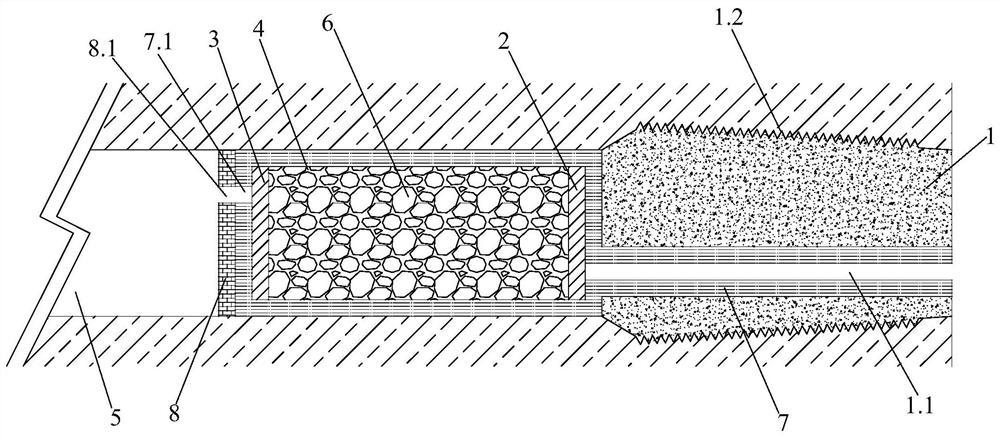
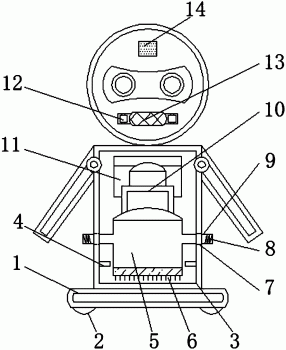
图1为本发明仿真移动玩具狗的整体示意图。
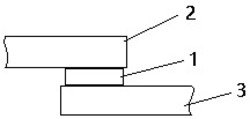
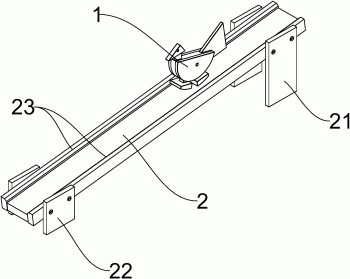
图2为本发明仿真移动玩具狗的腿部结构示意图
具体实施方式
电流变液在通常条件下是一种悬浮液,它在电场的作用下可发生液体-固体的转变.当外加电场强度大大低于某个临界值时,电流变液呈液态;当电场强度大大高于这个临界值时,它就变成固态;在电场强度的临界值附近,这种悬浮液的粘滞性随电场强度的增加而变大,这时很难说它是呈液态还是呈固态。电流变液往往用于机械装置,现有技术中都没有将其用于家用,尤其是玩具中。但是本发明就巧妙利用了电流变液的这个特性来模仿狗腿部关节的动作。
如图1、图2所示本发明仿真移动玩具狗,包括躯干1以及头部2,躯干1上设有腿部3,腿部3包括通过电机8连接在躯干1上的的腿根部4,所述腿根部4和腿前肢5之间通过活动关节6连接,所述电机8和活动关节6均连接于躯干1中的中控芯片7。所述活动关节6包括连接在腿根部4的内动圈41,所述内动圈41外侧套接有连接在腿前肢5上的外动圈51,所述外动圈51内设有电流变液槽52,所述电流变液槽52内所设隔间53数量为4个。所述电机8为双向电机8。
在仿真移动玩具狗前进时,在中控芯片7的作用下,四肢以斜对向为一组交错行动。在向前行走时,左前腿和右后腿中电流变液通电,由液态转变为固态,此时左前腿和右后腿的腿根部4和腿前肢5之间内动圈41外动圈51相对位置固定,不会转动,此时所有腿根部4和躯干1连接处的电机8均向前转动一个角度,使得躯干1带动右前腿和左后腿向前移动一段距离。而且由于右前腿和左后腿的的腿根部4和腿前肢5之间内动圈41外动圈51之间电流变液是液态的,因此腿根部4抬起,和地面没有接触,在外观上看上去更像小狗抬起腿向前行动的样子。此时右前腿和左后腿和躯干1相连接的电机略微反向运转,右前腿和左后腿的腿根部4往后移动,而且此时右前腿和左后腿的腿前肢5在惯性的作用下继续向前,这样右前腿和左后腿的腿根部4和腿前肢5重新处于同一直线上,此时右前腿和左后腿中的电流变液通电固定,而左前腿和右后腿中电流变液失电,重新变成液态,整个仿真移动玩具狗完成重心的转换。
后退时,仅仅是电机8的转动方向相反,工作原理相同。虽然和前进时相比略微有些不自然,但是实现了现有技术中步行仿真移动玩具狗无法后退的功能。(轮式的仿真移动玩具狗不在比较之列)
当处于奔跑状态时,原理和行走相同,在中控芯片7的作用下,四肢以是工作脚变成前腿和后腿之间的交替。同时电机8的转换频率更高。
通过这样的结构,由于重心不稳,因此在奔跑和后退时也可能会发生仿真移动玩具狗翻倒的情况,但是这样并不会妨碍整个仿真移动玩具狗的娱乐性,这样反而能使人们更喜欢这样的仿真移动玩具狗。
仿真移动玩具狗专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0