








专利摘要
本实用新型公开了一种基于应用型工科教学的结构实验装置,包括:基板,固定安装在基板上的升降机构,固定安装在升降机构上的施力装置,以及固定安装在基板上的固定机构;所述升降机构包括分布在左右后三个方向上的第一升降机构、第二升降机构以及第三升降机构;所述施力装置由分别安装在第一升降机构、第二升降机构以及第三升降机构第一施力装置、第二施力装置以及第三施力装置组成,所述三个施力装置的动力输出端共同连接施力块。本实用新型结构简单,施力机构按方向相对独立,升降机构包括分布在左右后三个方向上的第一升降机构、第二升降机构以及第三升降机构,进而使施力机构在三维空间的施力互不影响,精确实验数据。
权利要求
1.基于应用型工科教学的结构实验装置,适用于结构工程梁柱教学实验系统,其特征在于,包括:基板,固定安装在基板上的升降机构,固定安装在升降机构上的施力装置,以及固定安装在基板上的固定机构;
所述升降机构包括分布在左右后三个方向上的第一升降机构、第二升降机构以及第三升降机构;所述施力装置包括:分别安装在第一升降机构、第二升降机构以及第三升降机构上的第一施力装置、第二施力装置以及第三施力装置,所述三个施力装置的动力输出端共同连接施力块。
2.根据权利要求1所述的基于应用型工科教学的结构实验装置,其特征在于,所述第一升降机构、第二升降机构以及第三升降机构均包括:固定连接在基板上的连接底板,固定穿插在连接底板三对导向柱,分别穿插在导向柱上的调节装置,以及安装在调节装置上的驱动装置。
3.根据权利要求2所述的基于应用型工科教学的结构实验装置,其特征在于,所述三对导向柱分别为左导向柱、右导向柱以及后导向柱,所述调节装置包括:套接在一对导向柱上的升降板,套接在升降板内部的两个导套,螺接在升降板一侧的锁紧手柄,固定穿插在一对导向柱顶部的固定板,穿插在升降板和固定板中点处的丝杠组件,以及传动连接丝杠组件的驱动电机。
4.根据权利要求3所述的基于应用型工科教学的结构实验装置,其特征在于,所述升降板分别安装在三对导向柱上,所述三个升降板上均设有施力装置,所述施力装置包括:固定连接升降板一侧的气缸固定座,固定安装在气缸固定座上的电动气缸,连接在电动气缸动力输出端的重力传感器,固定安装在重力传感器一侧的连杆,以及铰接在连杆另一端的施力块。
5.根据权利要求1所述的基于应用型工科教学的结构实验装置,其特征在于,所述固定机构包括:固定安装在基板上的铰接座,连接在铰接坐上的安装板,铰接在安装板另一端的调节支座,以及卡接在安装板滑槽中的管柱定位板;所述管柱定位板上设有固定架。
6.根据权利要求5所述的基于应用型工科教学的结构实验装置,其特征在于,所述管柱定位板的一侧连接Z轴电动气缸动力输出杆,所述管柱定位板在Z轴电动气缸的带动下在滑槽中滑动,进而调节管柱定位板在Z轴方向的位置。
7.根据权利要求5所述的基于应用型工科教学的结构实验装置,其特征在于,所述调节支座包括:固定安装在安装板底部的铰接头,连接在铰接头一端的螺杆,螺接在螺杆上的螺母,套接在螺母上的螺母固定座,以及固定连接在螺母外侧且穿插在螺母固定座上的紧固手柄;所述螺杆的底部设有转动马达,在转动马达的带动下在螺母内转动,进而调节安装板围绕铰接头调整角度。
说明书
技术领域
本实用新型属于工科教学设备领域,尤其是一种基于应用型工科教学的结构实验装置。
背景技术
在结构工程学中关于多功能结构的疲劳实验的设备上,现有的疲劳实验装置结构复杂,在多个方向施力过程中常因内部力的冲击造成施力装置施力的卡顿的情况,进而影响实验数据的准确性。
发明内容
发明目的:提供基于应用型工科教学的结构实验装置,以解决现有技术存在的上述问题。
技术方案:基于应用型工科教学的结构实验装置,包括:基板,固定安装在基板上的升降机构,固定安装在升降机构上的施力装置,以及固定安装在基板上的固定机构;
所述升降机构包括分布在左右后三个方向上的第一升降机构、第二升降机构以及第三升降机构;所述施力装置包括:分别安装在第一升降机构、第二升降机构以及第三升降机构上的第一施力装置、第二施力装置以及第三施力装置,所述三个施力装置的动力输出端共同连接施力块。
在进一步的实施例中,所述第一升降机构、第二升降机构以及第三升降机构均包括:固定连接在基板上的连接底板,固定穿插在连接底板三对导向柱,分别穿插在导向柱上的调节装置,以及安装在调节装置上的驱动装置。
在进一步的实施例中,所述三对导向柱分别为左导向柱、右导向柱以及后导向柱,所述调节装置包括:套接在一对导向柱上的升降板,套接在升降板内部的两个导套,螺接在升降板一侧的锁紧手柄,固定穿插在一对导向柱顶部的固定板,穿插在升降板和固定板中点处的丝杠组件,以及传动连接丝杠组件的驱动电机。
在进一步的实施例中,所述升降板分别安装在三对导向柱上,所述三个升降板上均设有施力装置,所述施力装置包括:固定连接升降板一侧的气缸固定座,固定安装在气缸固定座上的电动气缸,连接在电动气缸动力输出端的重力传感器,固定安装在重力传感器一侧的连杆,以及铰接在连杆另一端的施力块。
在进一步的实施例中,所述固定机构包括:固定安装在基板上的铰接座,连接在铰接坐上的安装板,铰接在安装板另一端的调节支座,以及卡接在安装板滑槽中的管柱定位板;所述管柱定位板上设有固定架。
在进一步的实施例中,所述管柱定位板的一侧连接Z轴电动气缸动力输出杆,所述管柱定位板在Z轴电动气缸的带动下在滑槽中滑动,进而调节管柱定位板在Z轴方向的位置。
在进一步的实施例中,所述调节支座包括:固定安装在安装板底部的铰接头,连接在铰接头一端的螺杆,螺接在螺杆上的螺母,套接在螺母上的螺母固定座,以及固定连接在螺母外侧且穿插在螺母固定座上的紧固手柄;所述螺杆的底部设有转动马达,在转动马达的带动下在螺母内转动,进而调节安装板围绕铰接头调整角度。
有益效果:本实用新型结构简单,施力机构按方向相对独立,升降机构包括分布在左右后三个方向上的第一升降机构、第二升降机构以及第三升降机构,进而使施力机构在三维空间的施力互不影响,精确实验数据。
附图说明
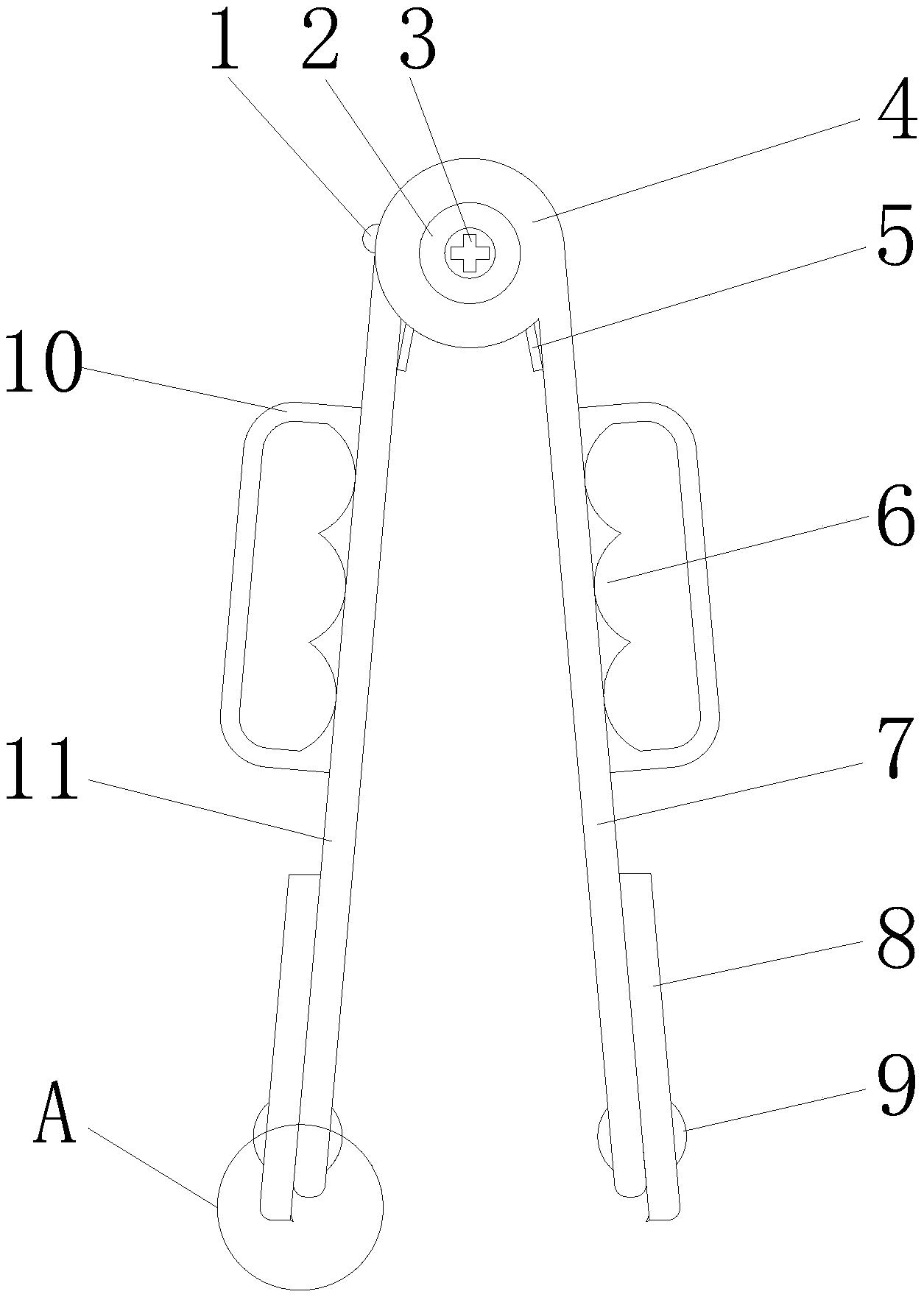
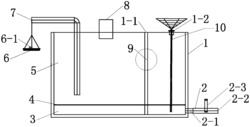
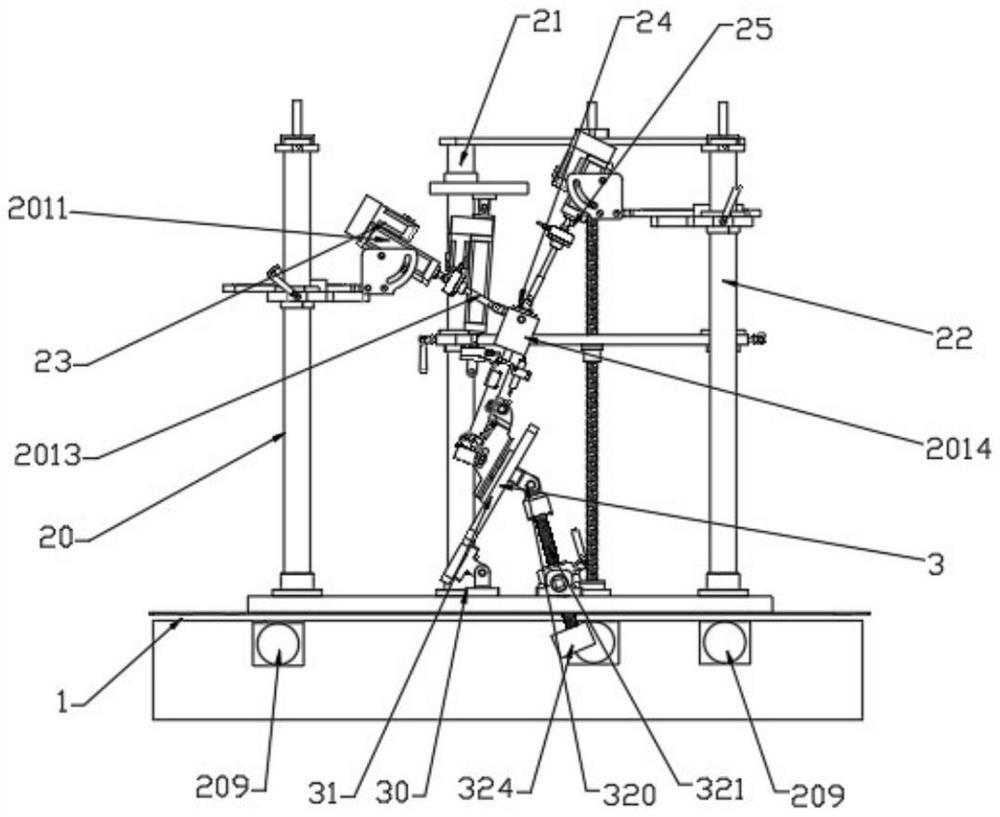
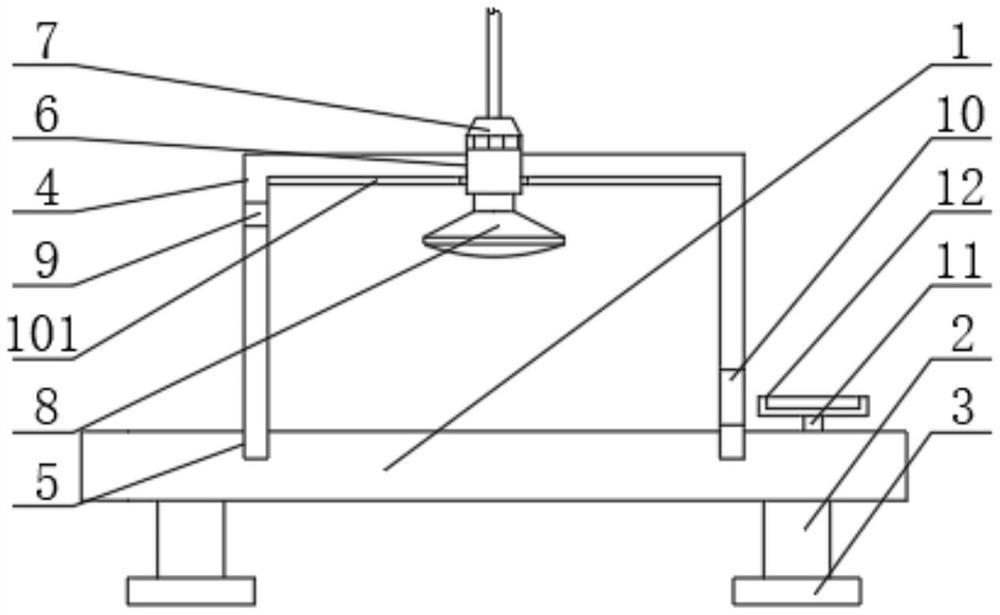
图1是本实用新型结构实验装置的结构示意图。
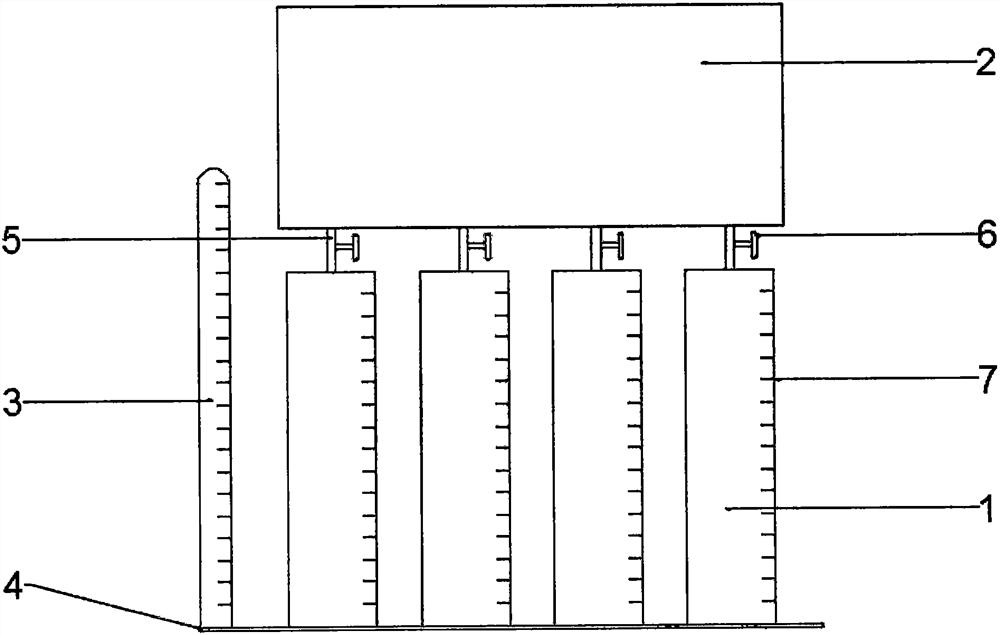
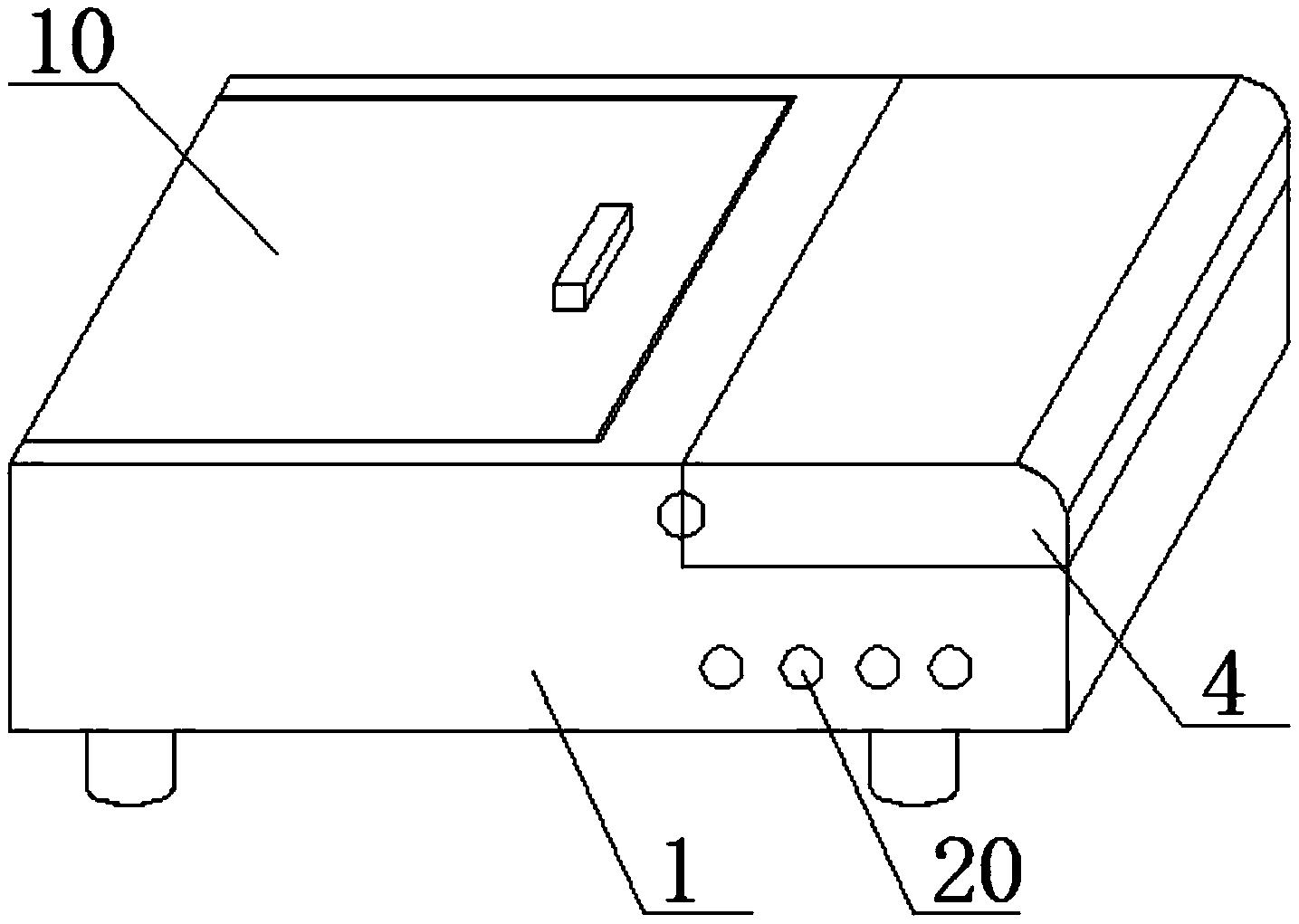
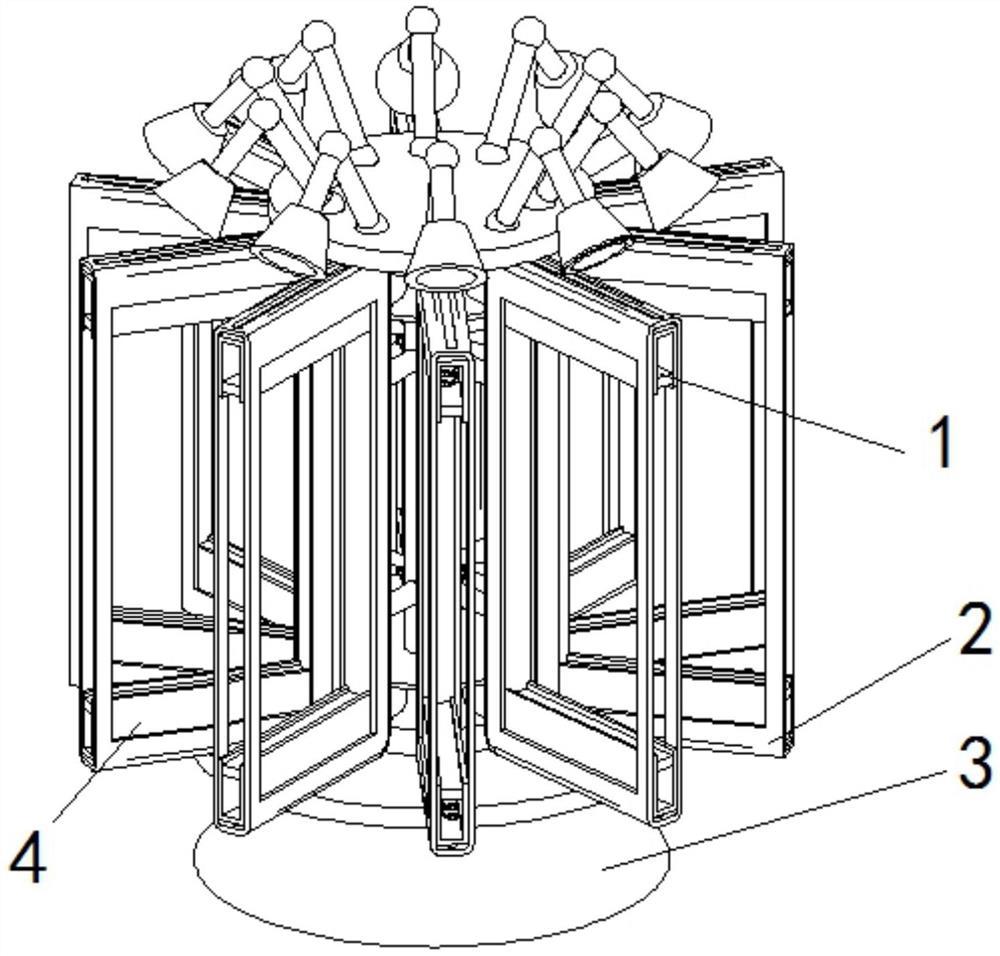
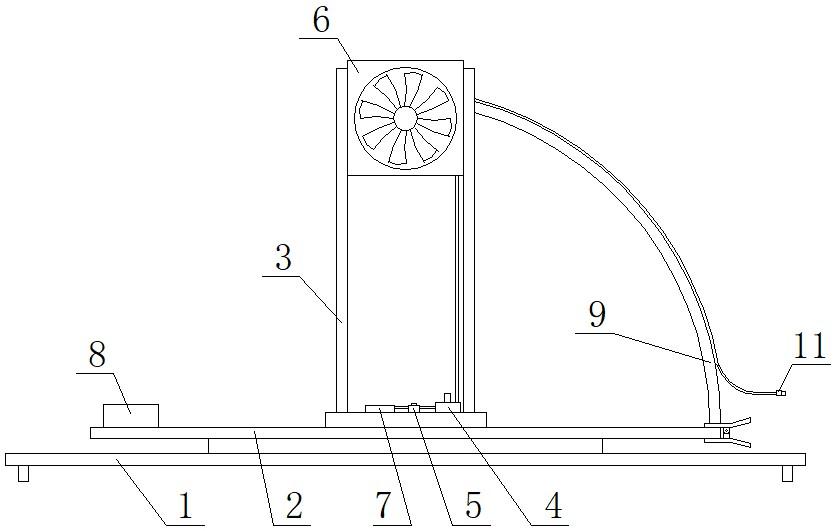
图2是本实用新型结构实验装置的立体结构图。
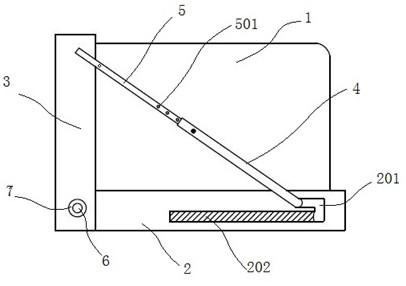
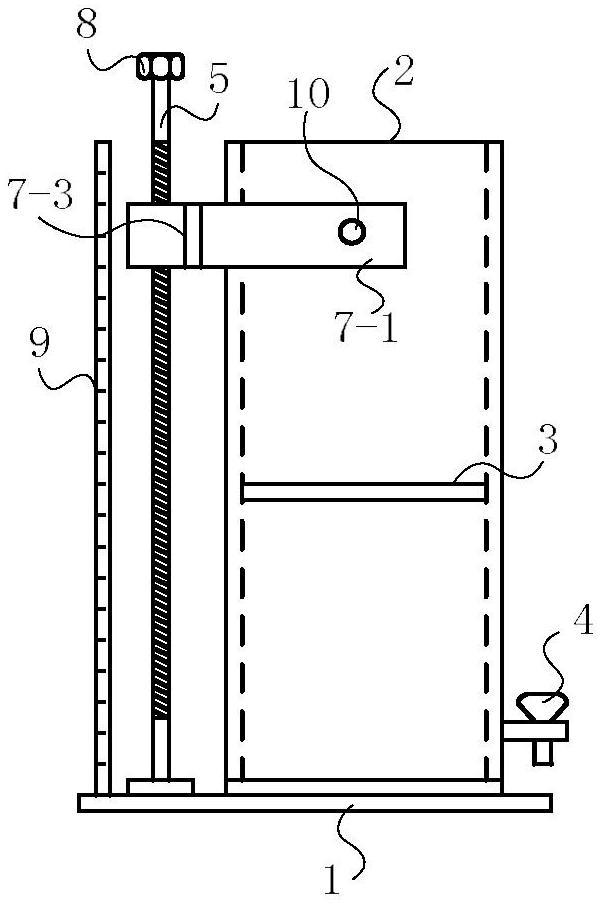
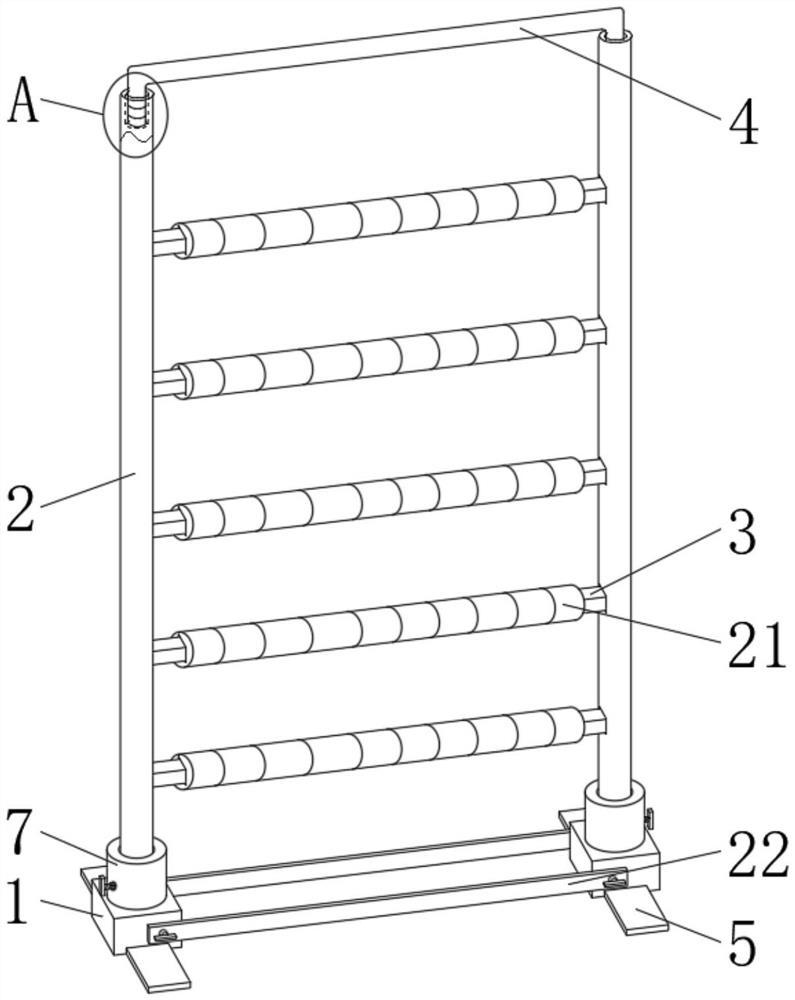
图3是本实用新型固定机构的结构示意图。
附图标记为:基板1、第一升降机构20、第二升降机构21、第三升降机构22、第一施力装置23、第二施力装置24、第三施力装置25、连接底板201、左导向柱202、右导向柱203、后导向柱204、升降板205、导套206、固定板207、丝杠组件208、驱动电机209、气缸固定座2010、电动气缸2011、重力传感器2012、连杆2013、施力块2014、固定机构3、铰接座30、安装板31、调节支座32、滑槽33、管柱定位板34、固定架35、Z轴电动气缸36、铰接头320、螺杆321、螺母322、螺母固定座323、转动马达324。
具体实施方式
在下文的描述中,给出了大量具体的细节以便提供对本实用新型更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本实用新型可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本实用新型发生混淆,对于本领域公知的一些技术特征未进行描述。
申请人发现现有的疲劳实验装置结构复杂,在结构工程疲劳实验中,装置中设有多个施力机构,进而造成多个方向施力过程中常因内部力的冲击造成施力装置施力的卡顿的情况,进而影响实验数据的准确性。
如图1至图3所示的一种基于应用型工科教学的结构实验装置,包括基板1、第一升降机构20、第二升降机构21、第三升降机构22、第一施力装置23、第二施力装置24、第三施力装置25、连接底板201、左导向柱202、右导向柱203、后导向柱204、升降板205、导套206、固定板207、丝杠组件208、驱动电机209、气缸固定座2010、电动气缸2011、重力传感器2012、连杆2013、施力块2014、固定机构3、铰接座30、安装板31、调节支座32、滑槽33、管柱定位板34、固定架35、Z轴电动气缸36、铰接头320、螺杆321、螺母322、螺母固定座323、转动马达324。
该装置适用于结构工程梁柱教学实验系统,结构实验装置包括:基板1,该基板1的底部设有电气柜用于安放电气元件。基板1上设有升降机构和用于安放管件的结构件的固定机构3。升降机构带动安装在升降机构中的施力装置相对于结构件的高度位置进行调整,以满足不同高度结构件的适用范围。
为了解决多个施力装置在共同作用中造成的力的冲击,所述升降机构包括分布在左右后三个方向上的第一升降机构20、第二升降机构21以及第三升降机构22;所述施力装置由分别安装在第一升降机构20、第二升降机构21以及第三升降机构22第一施力装置23、第二施力装置24以及第三施力装置25组成,所述三个施力装置的动力输出端共同连接施力块2014。将施力装置按方向进行独立安装避免常多个施力装置的力的冲击造成施力装置施力的卡顿的情况。所述第一升降机构20、第二升降机构21以及第三升降机构22均包括:固定连接在基板1上的连接底板201,固定穿插在连接底板201三对导向柱,分别穿插在导向柱上的调节装置,以及安装在调节装置上的驱动装置。所述调节装置在驱动装置的带动下可以调节施力装置的高度。
为了使施力装置单独隔离且保证施力过程平稳。所述三对导向柱分别为左导向柱202、右导向柱203以及后导向柱204,所述调节装置包括:套接在一对导向柱上的升降板205,套接在升降板205内部的两个导套206,螺接在升降板205一侧的锁紧手柄,固定穿插在一对导向柱顶部的固定板207,穿插在升降板205和固定板207中点处的丝杠组件208,以及传动连接丝杠组件208的驱动电机209。所述驱动电机209为三个均安装在电气柜中,电机输出轴与丝杠传动连接带动丝杠组件208转动,升降板205套接在丝杠上进而在转动的过程中带动升降板205在导柱上进行升降,升降板205到达指定高度后转动螺接在升降板205内部的锁紧手柄,进而向内压紧导套206使升降板205固定在导向柱的上一处,防止施力装置在施力过程中出现晃动。驱动电机209的型号为ACSM130-G15015LZ。
为了准确记录施力数据,所述升降板205分别安装在三对导向柱上,所述三个升降板205上均设有施力装置,所述施力装置包括:固定连接升降板205一侧的气缸固定座2010,固定安装在气缸固定座2010上的电动气缸2011,连接在电动气缸2011动力输出端的重力传感器2012,固定安装在重力传感器2012一侧的连杆2013,以及铰接在连杆2013另一端的施力块2014。电动气缸2011的连接的重力传感器2012将动力的输出数值。
施力块2014的另一侧通过连接架与固定件进行卡接,固定件固定在固定机构3中,所述固定机构3包括:固定安装在基板1上的铰接座30,连接在铰接坐上的安装板31,铰接在安装板31另一端的调节支座32,以及卡接在安装板31滑槽33中的管柱定位板34;所述管柱定位板34上设有固定架35。安装板31通过铰接座30固定在基板1上,安装板31的另一端通过调节装置来调节安装板31的倾斜角度。
在一些长度尺寸较大的工件放置过程中,调整管柱定位板34在安装板31上的位置可使管柱定位板34依照工件的长度进行调整,所述管柱定位板34的一侧连接Z轴电动气缸36动力输出杆,所述管柱定位板34在Z轴电动气缸36的带动下在滑槽33中滑动,进而调节管柱定位板34在Z轴方向的位置。
此外在固定机构3的整体高度可通过安装板31一侧的调节支座32进行调整,所述调节支座32包括:固定安装在安装板31底部的铰接头320,连接在铰接头320一端的螺杆321,螺接在螺杆321上的螺母322,套接在螺母322上的螺母固定座323,以及固定连接在螺母322外侧且穿插在螺母固定座323上的紧固手柄;所述螺杆321的底部设有转动马达324,在转动马达324的带动下在螺母322内转动,进而调节安装板31围绕铰接头320调整角度,使得固定机构3整体高度的调整。所述转动马达324的型号为RF-300CA-14250。
工作原理:
将学生制作的管件结构件放置在固定架35上固定,调整Z轴电动气缸36动力输出杆带动管柱定位板34在滑槽33中滑动,同时控制转动马达324带动螺杆321转动使管件结构件顶部能与施力块2014的另一侧的连接架卡接,此外调整三个升降板205上均设有施力装置位置,驱动电机209带动丝杠转动使升降板205停留在与施力块2014水平位置后,转动锁紧手柄将升降板205固定,驱动三个方向的电动气缸2011对工件进行疲劳实验,重力传感器2012将记录电动气缸2011输出的动力值精确实验结果。
本实用新型结构简单,施力机构按方向相对独立,升降机构包括分布在左右后三个方向上的第一升降机构20、第二升降机构21以及第三升降机构22,进而使施力机构在三维空间的施力互不影响,精确实验数据。
以上结合附图详细描述了本实用新型的优选实施方式,但是,本实用新型并不限于上述实施方式中的具体细节,在本实用新型的技术构思范围内,可以对本实用新型的技术方案进行多种等同变换,这些等同变换均属于本实用新型的保护范围。
基于应用型工科教学的结构实验装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0