









![一种吡啶吡唑铜[I]双核配合物刺激响应发光变色材料的制备方法](https://www.zhichawang.com/youzhi22/CN111892625B/CN111892625B.jpg)
专利摘要
本发明公开了一种星地量子通信链路方向跟踪系统,针对星地量子通信高精度信标跟踪的应用背景,提供一种基于CMOS或CCD探测器、FPGA硬件图像处理与信息提取的实时高精度高带宽信标探测与信息获取系统,采用了集成化设计方法;并提出光斑整形与位置提取相结合的信标光斑图像处理方法,一定程度上抑制了卫星和地面间大气湍流信道对信标光的干扰作用,提高了捕获跟踪系统的跟瞄精度、带宽和稳定性。在存在大气湍流的条件下,系统对信标激光的探测精度优于0.5μrad,探测带宽大于2.5kHz,满足了星地量子通信捕获跟踪系统尤其是星载终端的需求。
说明书
技术领域
本发明属于量子通信技术领域,具体是指一种应用于星地量子通信中的,通信链路方向提取与跟踪的系统。
背景技术
量子通信比常规的自由空间激光通信有更高的通信链路指向精度要求。星地量子通信的捕获跟踪瞄准(ATP)系统用于建立量子通信终端间的量子通信链路,必须具有非常高的跟瞄精度、带宽和稳定性。捕获跟踪系统的通信链路方向提取与跟踪子模块必须具有更高的性能。
目前公知的应用于星地间量子通信的采用CCD或CMOS图像传感器作为探测器的通信链路方向提取与跟踪系统存在以下缺点而难以满足星地量子通信的需求:
1.系统的探测器驱动、光斑图像处理、跟踪控制器等功能由多个电路模块或者多个处理单元分别实现。各个功能模块内部运算延时加上模块间的数据传输延时造成系统闭环的总信号延时较大,达到3ms甚至更长时间,限制了捕获跟踪系统的跟瞄抑制带宽。
2.并未采取抑制大气湍流对星地间量子通信链路干扰作用的措施,或者采取的抑制措施效果十分有限,即使在较好的大气条件下最优的探测精度约为1~2μrad左右。
3.系统的构成复杂,体积和重量大,不适合作为星载量子通信设备。
发明内容
本发明针对星地量子通信高精度信标跟踪的应用背景,为了解决上述现有技术的不足,提供一种基于CMOS或CCD探测器、FPGA硬件图像处理与信息提取的实时高精度高带宽的星地通信链路方向提取与跟踪系统。
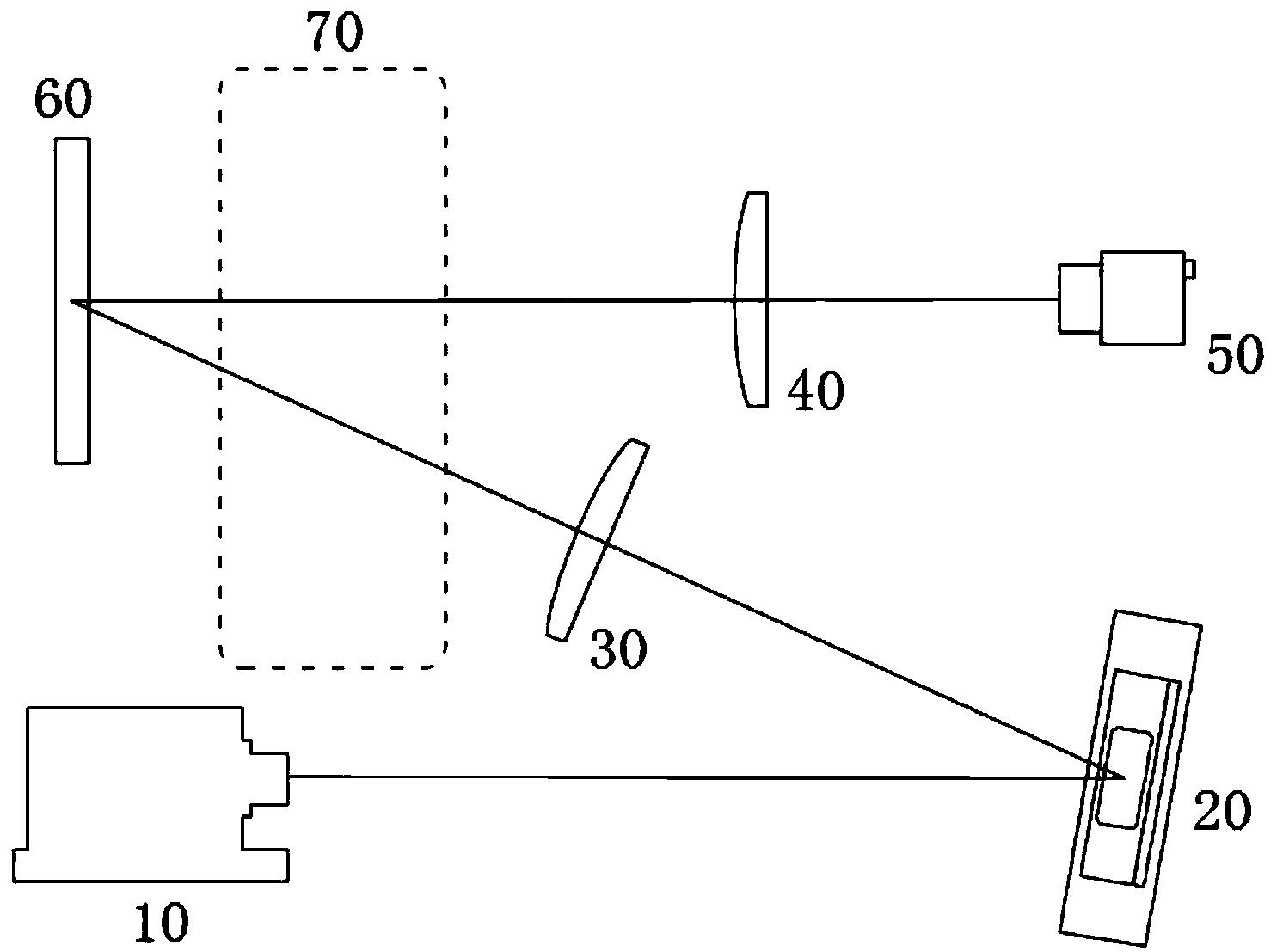
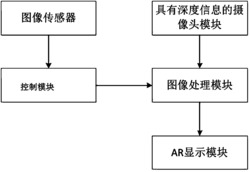
本发明主要由图像传感器、FPGA、数模转换接口、数据/指令差分接口构成,它们的连接关系如图1所示。其中,图像传感器根据量子通信的应用需求可以选用可见光波段、红外波段的CCD传感器或CMOS传感器;FPGA选用规模大于8000逻辑单元的器件即可;模数转换接口芯片选用速度大于10MHz转换频率的DAC芯片;对差分接口芯片无特殊要求。
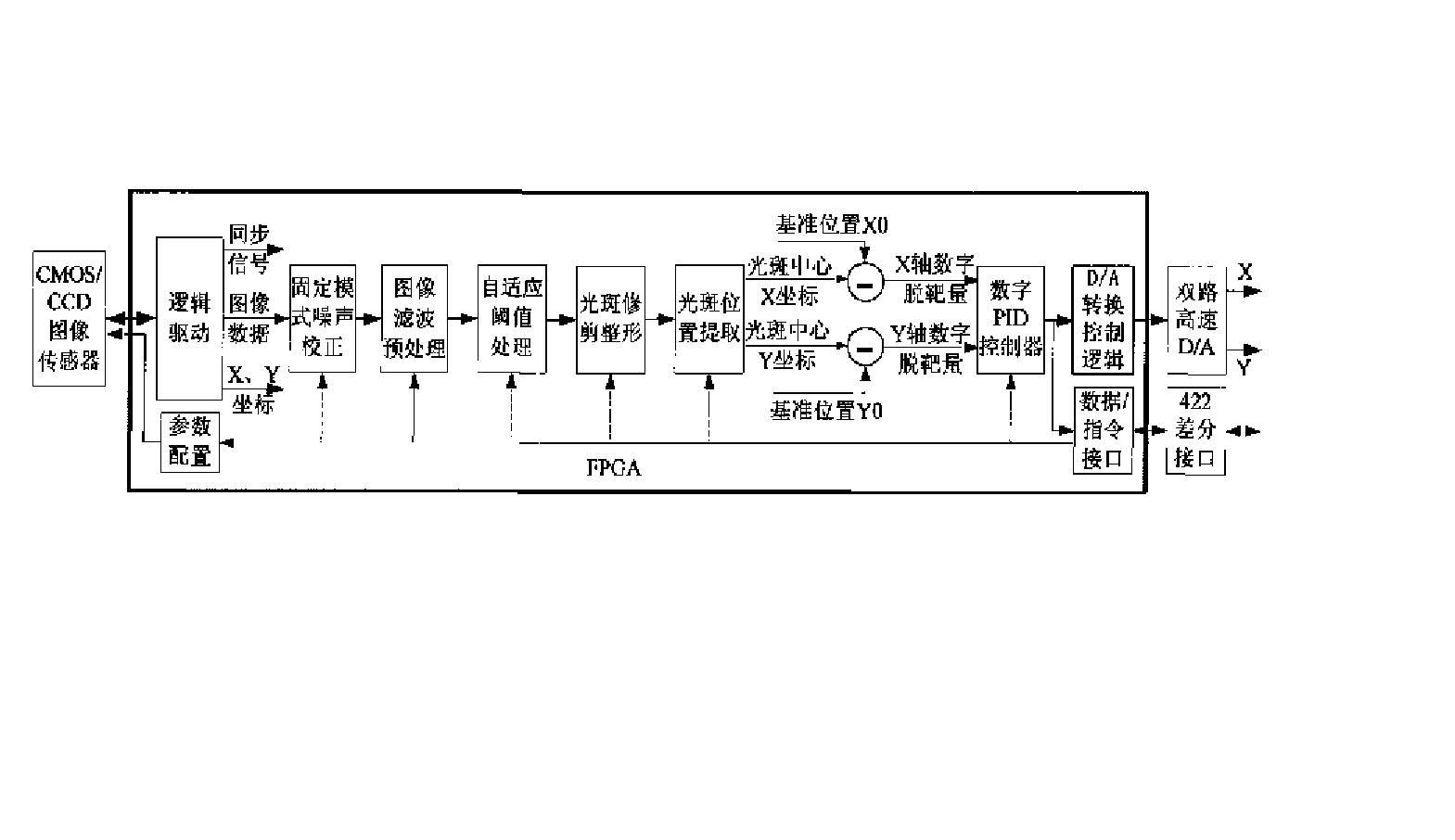
图1还给出在FPGA内部集成实现探测器驱动、光斑图像处理、跟踪控制器与数据/指令接口等多种功能的方法和电路结构。这些功能通过用Verilog或VHDL硬件描述语言对FPGA编程实现。
其中,FPGA的光斑图像处理方法是一种硬件卷积方式的图像处理方法。具体是指FPGA对从CMOS/CCD探测器输出的图像数据逐点即时处理的方法,包括:固定模式噪声(FPN)校正、图像滤波预处理、自适应阈值处理、光斑修剪整形和光斑位置提取。其中,固定模式噪声(FPN)校正采用简单有效的列模式校正方法;图像滤波预处理采用八邻近中值滤波算法;光斑位置提取采用质心算法或形心算法。
阈值的自适应算法为:系统上电时自动设定一个初始阈值,在系统工作过程中FPGA统计每帧图像阈值处理后的亮点(数据值大于零的像素点)个数,根据当前帧图像的统计结果自适应调整下一帧图像的阈值。当亮点数太多时逐渐增加阈值,当亮点数太少时逐渐降低阈值。
光斑修剪整形使用改良的膨胀和腐蚀结合的方法。所说的本发明对该图像处理方法的改良是指,对信标光斑图像做膨胀和腐蚀处理时不对图像做二值化处理而直接采用原始输入图像数进行运算,并且膨胀点的取值为周围邻近点的均值。这样的改良能够保留真实光斑的亮度分布信息,提高后续光斑位置提取结果的精度。本发明率先将膨胀和腐蚀图像处理方法应用于星地量子通信链路方向提取与跟踪系统,取得良好效果。光斑修剪整形消除了光斑的扩散、毛刺和絮状边缘、内部裂缝,从而较有效地抑制了大气湍流和其它干扰因素对星地量子通信信标的干扰作用。
本发明具有以下优点:
1.系统的探测器驱动、光斑图像处理、跟踪控制器等功能由一个FPGA芯片集成实现,避免了多个电路模块间数据传输产生的延迟,克服了现有系统图像数据传输和图像处理延时大的不足。采用了实时的硬件卷积图像处理方法使系统延时小于1μs。
2.低延时的特点结合大于2.5kHz系统测带宽,使得整个系统的跟瞄抑制带宽可以提高到200Hz以上。达到国内先进水平,基本满足了星地量子通信尤其是星载终端的需求。
3.本发明将膨胀和腐蚀图像处理算法引入到量子通信捕获跟踪系统中使用,并做了改良,一定程度上克服了现有系统不能有效抑制大气湍流干扰的不足。在存在大气湍流的条件下,系统对信标激光的探测精度优于0.5μrad。
4.系统集成度高,具有小型化、轻量化和高性能的技术特点。
5.同时具备数字接口和模拟接口,具有很好的应有适应性。
附图说明:
图1是本发明的量子通信信标探测、通信链路方向提取与跟踪系统的核心结构示意图。
图2是本发明中提出的基于光斑整形与位置提取硬件实时处理算法的效果实例图。其中,(a)是FPN校正后的信标光斑图像;(b)是滤波预处理后的信标光斑图像;(c)是自适应阈值处理后的信标光斑图像(局部放大);(d)是光斑修剪整形后的信标光斑图像(局部放大);(e)是信标光斑位置提取得到的结果;(f)是信标光斑位置提取结果在原始信标光斑图像中的位置。
具体实施方式:
结合图1系统结构和图2一组典型试验数据为例,说明系统的设计实现方法和各个子模块的具体功能。实例系统选用CYIL1SM0300AA型CMOS图像传感器作为量子通信信标探测器,选用EP2C20F256型FPGA作为系统总控制,采用DA26LV31CM和DA26LV31CM422差分接口芯片实现了收发双向接口作为数据传输与指令控制接口,采用了AD5399型双路高速DAC输出X、Y两个方向的跟踪控制模拟信号。
1.逻辑驱动模块提供CMOS图像传感器需要的多路驱动信号完成传感器的驱动功能,使传感器正常工作输出图像数据。
2.在FPGA内部预存了CMOS图像传感器具体的固定模式(FPN)噪声数据,FPN校正子模块根据预存的数据对信标光斑原始图像进行校正,大幅度提高图像的质量,得到如图2(a)所示结果。
3.图像滤波预处理子模块使用中值滤波方法对信标光斑图像进行滤波,进一步去除图像中的杂散光噪声、探测器缺陷点噪声和其它椒盐噪声,得到如图2(b)所示结果。图像滤波预处理对信标位置的高精度提取有很重要的作用。
4.自适应阈值处理子模块对图像的背景与信标光斑进行区分,得到如图2(c)所示结果。具体方法是,根据选用的光斑位置提取算法(质心算法或形心算法),采取相应的处理公式:
或
其中,I为输入图像数据,I’为输出图像数据,T为区分光斑和背景的阈值。初始阈值设定为56,在系统工作过程中统计每帧图像阈值处理后的亮点(数据大于零)个数,根据当前图像的统计结果自适应调整下一帧图像的阈值。
5.光斑修剪整形子模块对光斑图像进行修剪整形,去除大气湍流和其它干扰因素对信标光斑造成的扩散、毛刺和絮状边缘、内部裂缝等不良作用。采用改良的腐蚀和膨胀算法相结合对图像处理一到两次即可得到较理想的结果,如图2(d)所示。
6.光斑位置提取子模块采用质心算法或者形心算法,根据以下公式对光斑位置进行提取:
其中,S、x、y、I、X和Y分别是一帧图像的数据集合、像素点的横坐标、像素点的纵坐标、输入到光斑位置提取子模块当前像素点的数据值、光斑位置横坐标提取结果和光斑位置纵坐标提取结果。
光斑位置提取得到如图2(e)所示结果,十字中心为提取得到的光斑中心位置。图2(f)为提取结果在信标光斑原始图像中的位置。
7.光斑中心位置与系统光轴中心相减即得到信标脱靶量,将此脱靶量输入到数字PID控制子模块进行跟踪控制处理,输出应有的跟踪数字控制量。该跟踪数字控制量通过数据/指令接口和422差分接口输出到其它应用单元或者数据采集单元,同时经过D/A转换控制逻辑和双路高速DAC输出X、Y两个方向的跟踪控制模拟信号。
其它应用单元或者上位机可以通过442差分接口和数据/指令接口,对信标提取与跟踪系统的工作方式、各种工作参数、CMOS图像传感器的配置参数以及各子模块的使能参数进行设置。
一种星地量子通信链路方向跟踪系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0