






专利摘要
本发明涉及一种水面垃圾清理船,船体采用双体设计,由侦测导航系统、收集系统、垃圾处理系统、垃圾卸载系统,推进系统构成;分成三种工作模式:自由航行模式,靠岸作业模式,非靠岸作业模式。通过侦测导航系统侦测到水面有垃圾的区域,进而自主导航进行工作实现无人操作,全自动化,清理效率好,灵活性强,工作平稳,安全可靠。其中设计的铲斗型链网式收集传送装置能实现回收的连续和间断工作相结合,节能高效。同时该装置上下可液压驱动变幅,能更快更有效地打捞不同水深的漂浮物。设计的卫星船协同收集让其更具灵活性和高效性。通过液压回转喷水枪喷水将岸上的水面漂浮物和半漂浮物回收上船。
说明书
技术领域技术领域
本发明涉及垃圾清理船,具体是一种高自动化,机械化的机电液一体化水面垃圾清理船。
技术背景背景技术
随着社会的发展,人口的增加,目前许多国家的水库、港口、湖泊、河流、海域漂浮物污染十分严重,给水资源、人们生活环境、地区投资环境和开发旅游资源等带来负面影响。另外,水葫芦在我国和北美、亚洲、大洋洲和非洲十分肆虐,使许多水域原有生物大量灭绝,严重破坏了生物多样性和生态平衡,导致河水发黑、发臭,河流、湖泊淤塞,相关海域赤潮频发。严重地影响到船舶的航运安全、水利设施和水电站机组的安全,对农业灌溉、水产养殖、旅游等造成的严重经济损失。
现在,海洋、河流垃圾的清理、处置技术与设施相对落后,垃圾清理仍以劳动密集型为主,许多非沿海发达城市的地方大多采用人工打捞水面垃圾的原始方法。利用半舱式或甲板机动驳船,由环卫工人手持网兜站在甲板边上直接把垃圾捞上来,这种作业方式劳动强度大、工作环境恶劣,人身安全没有保障,不仅清理难度大,综合成本高,而且无法治理在大雨台风季节暴发的水葫芦等海域污染。许多城市现用的垃圾清扫船,由于受资金与技术等因素影响,其性能和效率远远不能满足需要。因此,急需研究开发更加安全、高效的水上垃圾清理设备。
现国内外在水面垃圾收集装置,主要采用铲斗或传送带两种收集装置。铲斗收集工作不连续,属于间断工作型。在水面垃圾清理中,当在零航速收集状态时,必须有导流装置让垃圾引到斗中,耗能而效率不高。另外,当铲斗提升或翻转离开水面时,继续从前方冲过来的垃圾向后逸走或压在铲下,不能有效回收。传送带收集作业为连续作业,属于连接工作型。其效率不变;而动作线即为能量消耗线,系统要不停地运转,能量消耗较大。存在的主要问题有:吨位小,载重量少,主机功率小,航速低;设备简陋,功能单一,不灵活,其中许多操作都由人工进行,效率差。
发明内容发明内容
本发明的目的在于提供一种水面垃圾清理船,采用铲斗型链网式收集传送装置,实现连续工作或间歇工作,克服了纯传送带连续工作的耗能大和纯铲斗型的间断工作的效率低、效果差而能耗大等缺点。同时水面自适应装置能对该收集装置进行液压驱动变幅,能更快更有效地收集不同水深的漂浮物,另外也能在收集过程中,由于装载量增加对船浸深的影响。利用液压控制自动转向射水装置及卫星船协同收集装置,有效将岸边或死角位的垃圾回收上船,让其更具灵活性和高效性。结合切割装置,压缩装置,卸载装置对垃圾进行有效的处理。
本发明的水面垃圾清理船,由船体装置、收集系统、垃圾处理系统和垃圾卸载系统和侦测导航系统构成,其中由船体装置、垃圾处理系统和垃圾卸载系统和侦测导航系统可以采用市售产品,如图所示,本发明的特点是收集系统包括液压拨网臂装置101、铲斗型链网式收集传送装置103、液压垂直升降装置122)、水位自适应装置102、导流装置与喷水装置106和卫星船收集装置110;其中,
铲斗型链网式收集传送装置103包括金属网203、护罩301、耙齿302、耙柄303、支架304、横轴305、从动链轮306、带耳双排链307、链条张紧轮308、轴支座309、液压马达轴承310、液压马达311、液压马达键312、主动链轮313;其连接关系为支架304与5个横轴305相配合,横轴305的外端与轴支座309配合,而轴支座309通过螺栓固定在护罩301上;从动链轮306通过销与支架304连接;主动链轮313与铲斗型链网式收集传送装置液压马达311输出轴配合,铲斗型链网式收集传送装置液压马达键312安装在该配合间;液压马达轴承310与铲斗型链网式收集传送装置液压马达311配合,安装在支架304里;带耳双排链307安装在从动链轮306和主动链轮313上;耙齿302安装在耙柄303上,而耙柄303压在金属网203上,一同安装在带耳双排链307的链耳上;铲斗型链网式收集传送装置液压马达311固定在护罩301上;护板201安装在护罩301上。
本发明船型采用双体设计,当侦测系统检测到垃圾水域时,由导航系统到达工作位置,升降液压缸将置于船首的新型的铲斗型链网式收集传送装置伸入水中。铲斗型链网式收集传送装置根据垃圾的量,可以实现连续工作或间歇工作模式,将漂浮的垃圾传送到压缩装置。例如当垃圾量不多,进入间歇工作模式,铲斗型链网式收集传送装置液压马达不开启,当收集到一定量时,开启液压马达,将垃圾传送到垃圾处理系统。在铲斗型链网式收集传送装置靠上端有一切割装置,将宽大的垃圾切割,以利于压缩。通过液压缸作为压力源的压缩头将垃圾进行压缩,在几次垃圾的压缩后,当检测到压缩液压缸的压力过大及行程过小时,发出信号到垃圾卸载装置,将压缩箱中的垃圾转移到垃圾收集箱完成回收工作。收集箱装满后,由辅助船或返航回岸,利用起吊机将垃圾箱吊出并更换。
而在铲斗型链网式收集传送装置水平段浸入水面恰当的深度,并与水面构成适当的倾角,铲斗型链网式收集传送装置入口两侧有通过液压控制的拨网臂,辅助将入口附近的垃圾带入铲斗型链网式收集传送装置。由于船随着垃圾装载量的增加对船体浸深的影响以及为适应水面垃圾浸深的不同,使铲斗型链网式收集传送装置水平段更好地接触垃圾或收集不同水深的漂浮物,在铲斗型链网式收集传送装置两旁装有水位自适应装置。当铲斗型链网式收集传送装置水平段离水面过高或过深时,动作发出信号到铲斗型链网式收集传送装置的升降液压缸,调整其浸深。在船艏有液压控制转向的射水装置,一是将岸边滩涂上的垃圾冲刷下来,二是将角落处等难以到达的地方的垃圾冲涌过来。另外,水泵的进水口置于铲斗型链网式收集传送装置背后,有助于导流,形成更好的工作流道。
在船的两边有两只卫星船,可以前进或后退,而卫星船导轮让其能沿着岸边行使。前进时,通过与母船连接的栅带将船周围的垃圾推移到船前收集装置入口,大大加快收集效率,加强了灵活性。
本发明与现有技术相比如下优点和特点:
1)连续收集与间断收集的有机结合:本发明利用创新的铲斗型链网式收集传送装置,能实现连续工作或间歇工作,克服了纯传送带连续工作的耗能大和纯铲斗型的间断工作的效率低、效果差而能耗大等缺点。
2)自主性及自适应性:当侦测系统检测到垃圾水域时,由导航系统以全航速6km/h到达工作位置再转换成作业航速4km/h或靠岸低速模式。铲斗型链网式收集传送装置根据垃圾的量,可以实现连续工作或间歇工作模式,将漂浮的垃圾传送到压缩装置。例如当垃圾量不多,进入间歇工作模式,铲斗型链网式收集传送装置液压马达不开启,当收集到一定量时,开启液压马达,将垃圾传送到垃圾处理系统。在垃圾处理系统中,当检测到压缩液压缸的压力过大及行程过小时,发出信号到垃圾卸载装置,将压缩箱中的垃圾转移到垃圾收集箱完成回收工作。当收集箱装满后,由辅助船或返航回岸,利用起吊机将垃圾箱吊出并更换垃圾箱。
为使船能在风雨中能正常工作,为其设计了顶篷。而在垃圾箱需要转卸时,又需要自主打开顶篷。因此,设计了一个自动开篷的装置,对顶篷进行开闭。
3)灵活协同工作:为克服现有收集船单纯靠船艏部分收集装置进行收集的低效性,难以收集在船两边的垃圾的缺点。本设计提出一种新的辅助收集方式。在船的两边有两只卫星船,可以前进或后退,进行协作收集垃圾。在前进时,通过与母船连接的栅带将船周围的垃圾推移到船前收集装置入口,大大加快收集效率,而卫星船导轮让其能沿着岸边行使,加强了灵活性。利用液压控制自动转向射水装置,有效将岸边或死角位的垃圾导引到收集系统。结合切割装置,压缩装置,卸载装置对垃圾进行有效的处理。
4)简易的垃圾卸载方式:现有的卸载方式多用传送带直接传送到岸上,这样需要耗费不少的卸载时间,而且还会导致卸载过程的逸漏等二次污染。本设计提出一种简易的垃圾卸载方式,以简易垃圾箱为载体,通过岸上或其它船上的起吊设备吊走替换这垃圾箱进行快速的卸载,节省收集船的非工作时间,提高效率。
附图说明附图说明
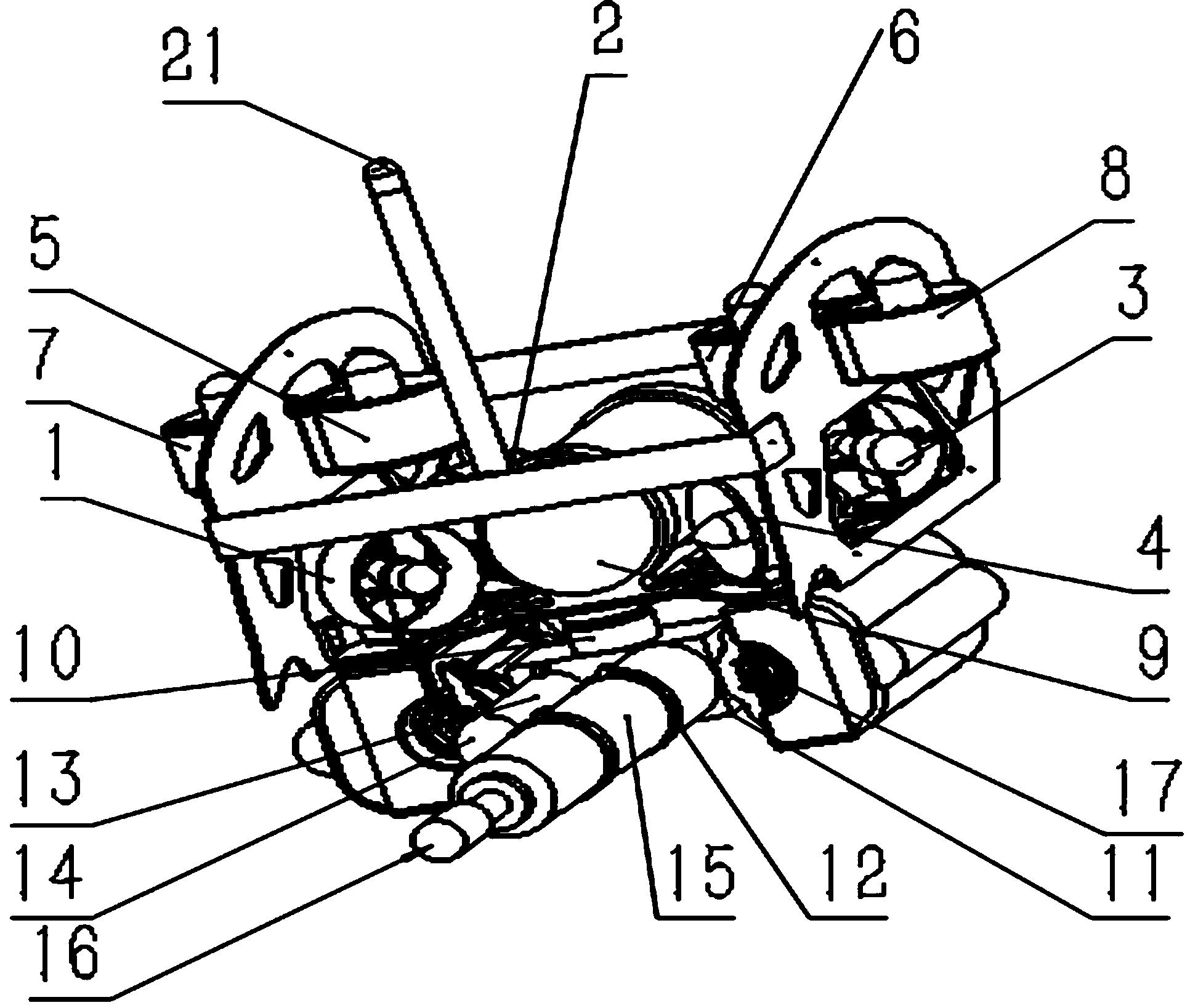
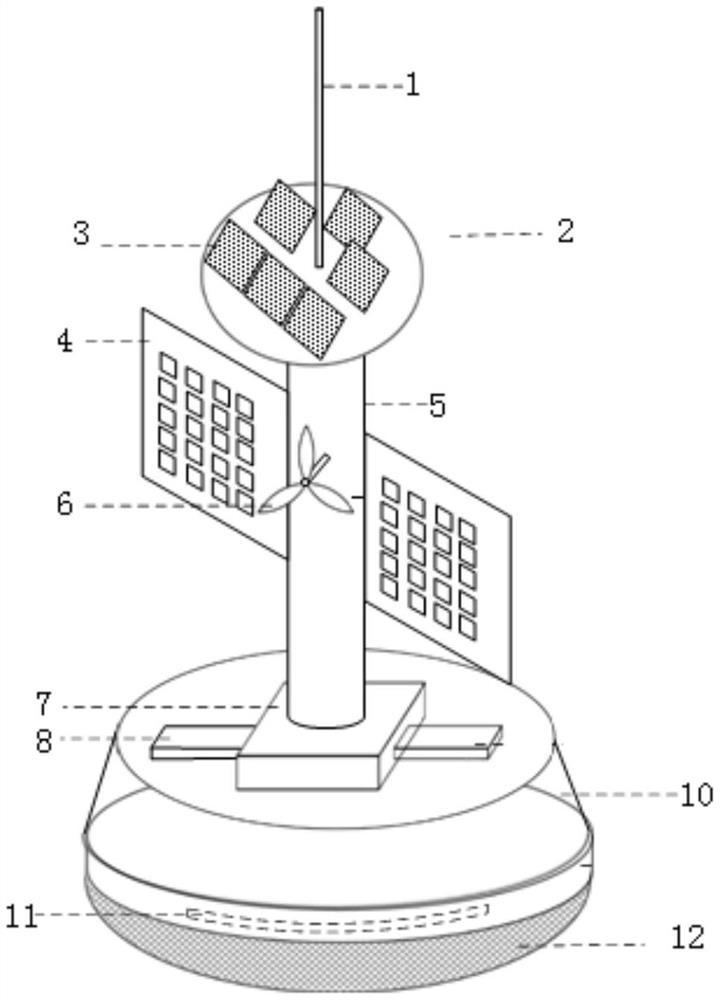
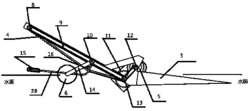
图1是本发明的整体布局图;
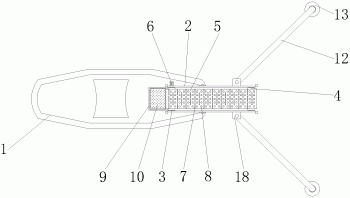
图2是本发明的液压拨网臂结构示意图;
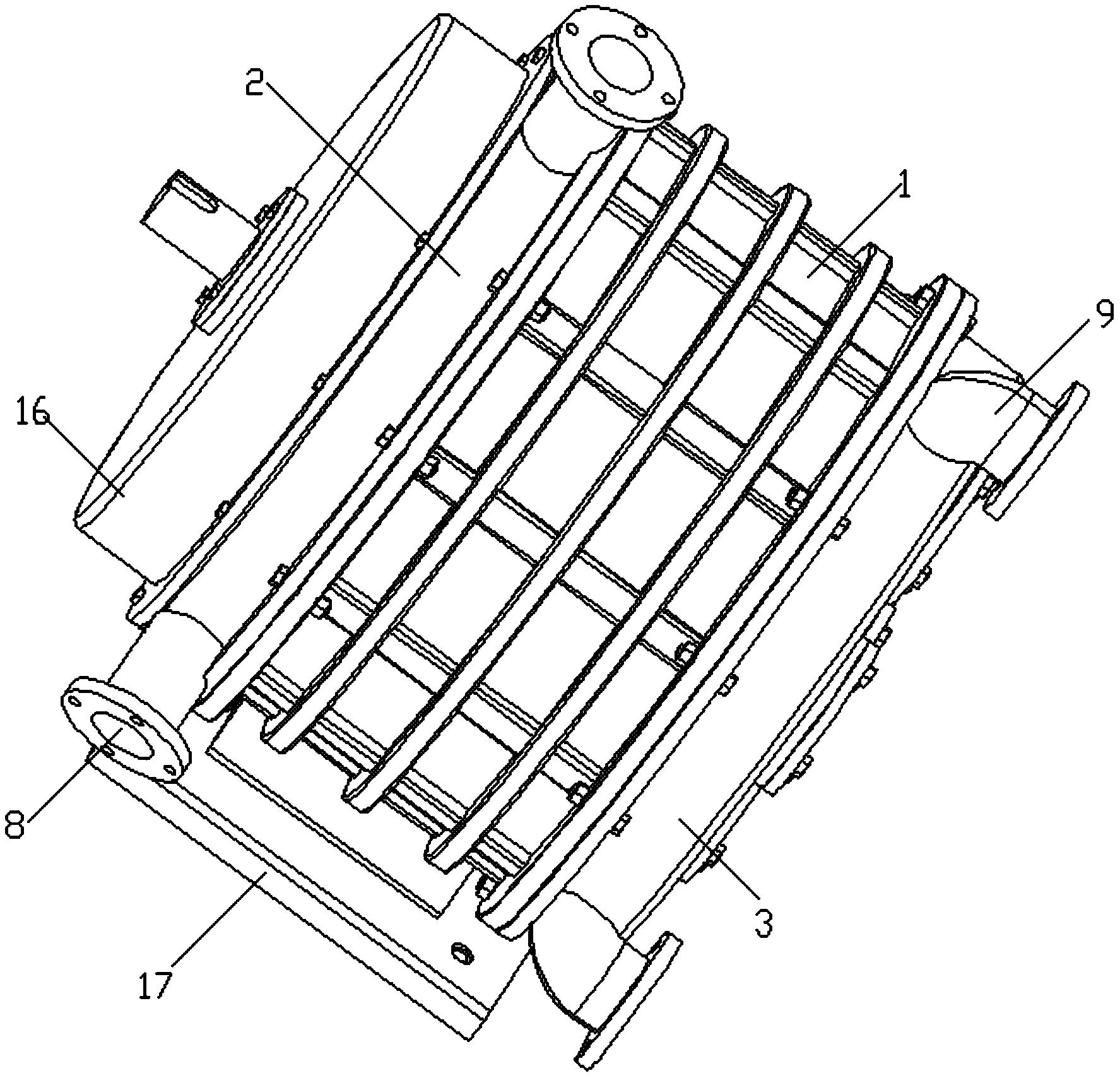
图3是本发明的铲斗型链网式收集传送装置结构示意图(没有金属网时);
图4是本发明的铲斗型链网式传送带收集装置内部骨架图;
图5是本发明的铲斗型链网式收集传送装置传动部分剖视图;
图6是本发明的液压垂直升降装置侧视图;
图7是本发明的液压垂直升降装置左边部分前视图;
图8是本发明的液压垂直升降装置右边部分后视图;
图9是本发明的水位自适应装置结构示意图;
图10是本发明的切割装置结构示意图;
图11是本发明的导流装置与喷水装置结构示意图;
图12是本发明的导流装置与喷水装置前视图;
图13是本发明的卫星船收集装置工作图;
图14是本发明的卫星船结构示意图;
图15是本发明的压缩装置与垃圾卸载装置轴测图;
图16是本发明的压缩装置与垃圾卸载装置剖视图;
图17是本发明的垃圾卸载装置结构示意图;
图18是本发明的开篷装置轴测图;
图19是本发明的开篷装置侧视图;
图20是本发明的开篷装置剖视图;
图21是本发明装置的后视图;
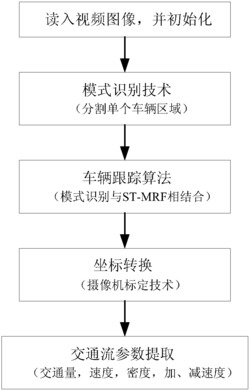
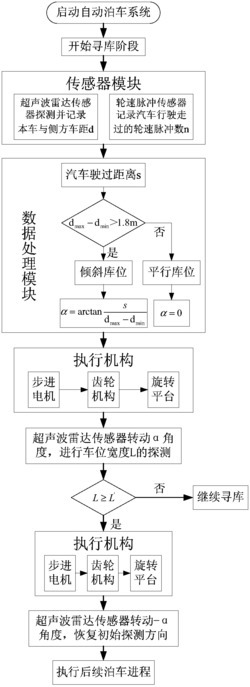
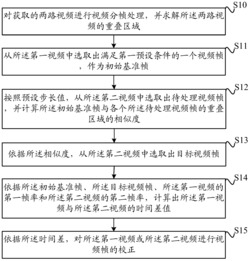
图22是侦测导航系统算法流程框图。
具体实施方式具体实施方式
如图1、21所示,一种水面垃圾清理船包括船体装置、收集系统、垃圾处理系统和垃圾卸载系统和侦测导航系统;
船体装置包括船艏105、甲板107、双船体108、总控制箱111(包括计算机、工控机等信号处理分析控制等设备)、柴油箱109、柴油机114、液压泵115、护栏116、液压油箱118和双推进器005;两个船体108分别安装在甲板107下方的两侧;监控摄像机120固定在船艏盖104上:甲板上的船边传感器123安装在船板107;液压拨网臂装置101安装于铲斗型链网收集装置103的护板201前端;水位自适应装置102安装在铲斗型链网收集装置103的底端,部分浸入水中;液压垂直升降装置122一端与通过升降横梁401与铲斗型链网式收集传送装置103的护板201相托,一端与甲板107相连;导流装置与喷水装置106置于船甲板107的右侧上方;卫星船收集装置110在船的两侧各有一套,靠在船体108一侧;切割装置121安装在铲斗型链网式收集传送装置103的护板201上;压缩装置112紧承在铲斗型链网式收集传送装置103后面;垃圾卸载装置104在压缩装置112下面,垃圾箱113紧承在垃圾卸载装置104在压缩装置112之后;双推进器005置于船的后端。
如图21所示,双船体108包括左船体1101、右船体1106;左船体1101和右船体1106分别固定在甲板两端。双推进器005包括左推进器1102、推进器固定管1103、推进器浸沉调节环1104、右推进器1105;其连接关系为左推进器1102和右推进器1105固定在推进器固定管1103,推进器固定管1103套接于推进器浸沉调节环1104中,而推进器浸沉调节环1104分别固定在甲板两端。水面垃圾清理船采用双推进器无舵航行。通过液压阀,对两个推进器上的液压马达进行控制。或同时向前或同时向后则实现前进和倒退,当两液压马达转向不同时,则实现差速转弯。另外,把两推进器布置在两船体之间,使得两船体之间的水流速度加快,形成更好的垃圾收集作业流道,从而起到导流作用,更有利于提高作业水流流道的效率。
收集系统包括液压拨网臂装置101、铲斗型链网式收集传送装置103、液压垂直升降装置122、水位自适应装置102、导流装置与喷水装置106和卫星船收集装置110。
如图2所示,两个液压拨网臂分别安装在铲斗型链网式收集传送装置入口两侧护板201上,辅助将入口附近的垃圾带入铲斗型链网式收集传送装置。液压拨网臂装置101一部分浸在水中,呈外八字向前张开,把前方垃圾引导到垃圾收集装置的宽度范围内,增加清理宽度。它由金属网作为拨面,因而叫拨网臂。液压拨网臂装置101包括拨网臂安装梢202、拨网臂主动杆204、拨网205、拨网框架206、拨网液压缸杆207、拨网液压缸209、液压缸安装梢211。拨网205安装在拨网框架206上,拨网框架206中部与拨网臂主动杆204相套接,拨网框架206后端通过拨网臂安装梢203固定在护板201上;拨网液压缸209的拨网液压缸杆207与拨网臂主动杆204相连,而液压缸209通过液压缸安装梢211安装在护板201上。拨网液压缸杆207和拨网液压缸209可用直接电机代替。当启动该装置时,液压油进入或抽出拨网液压缸209,推动或拉动拨网液压缸杆207,从而带动与拨网臂主动杆204连接的拨网框架206,拨网框架206上的拨网205往复摆动,帮助入口附近的垃圾进入铲斗型链网式收集传送装置入口。
如图3、图4和图5所示,铲斗型链网式收集传送装置103包括金属网203、护罩301、耙齿302、耙柄303、支架304、横轴305、从动链轮306、带耳双排链307、链条张紧轮308、轴支座309、液压马达轴承310、液压马达311、液压马达键312、主动链轮313;其连接关系为支架304与5个横轴305相配合,横轴305的外端与轴支座309配合,而轴支座309通过螺栓固定在护罩301上;从动链轮306通过销与支架304连接;主动链轮313与铲斗型链网式收集传送装置液压马达311输出轴配合,铲斗型链网式收集传送装置液压马达键312安装在该配合间;液压马达轴承310与铲斗型链网式收集传送装置液压马达311配合,安装在支架304里;带耳双排链307安装在从动链轮306和主动链轮313上;耙齿302安装在耙柄303上,而耙柄303压在金属网203上,一同安装在带耳双排链307的链耳上;铲斗型链网式收集传送装置液压马达311固定在护罩301上;护板201安装在护罩301上。其中,轴支座309可以用现成的带座轴承代替;液压马达311可用直流电机代替。
铲斗型链网式收集传送装置103,从其形状来看分水平段与倾斜段,倾斜段与水平段成150°角;其与两侧的护板201和护罩301组成相当一个铲斗;而金属网203(可更换不同疏密程度)安装在带耳双排链307的链耳上,构成链网式传送装置。因些此收集装置称为铲斗型链网式收集传送装置。当装置工作于间歇工作模式时,垃圾进入收集装置中,不断积累,当积累到额定的量,即启动铲斗型链网式收集传送装置液压马达311,从而通过主动链轮313带动带耳双排链307,金属网及耙齿302和耙柄303构成的耙一起运动,将垃圾传送到垃圾处理系统。所述的耙齿302和耙柄303可以作为一体一起加工制造。主动链轮313的传动除了以上的论述方式外,还可以让,而在铲斗型链网式收集传送装置左右对称的两个主动链轮313安装在一传动轴上,再由液压马达或电机直接或用皮带轮等带传动比来带动传动轴。
支架304由水平段与倾斜段组成,倾斜段与水平段成钝角(一般在120°~150°)。另外,如需要此角度能调整,那么可将护板201设计分为水平段和倾斜段两层和增加锁死装置,可使角度能有效调整和锁死于所需角度);
根据收集装置的收集能力的要求(收集量),配置不同尺寸和数量的零件,如支架105的尺寸大小可变,因此装配在其上面的横轴305和轴支座309等零件的数量相应会增加,横轴305布置间隔及数量与收集装置的载荷有关,进行应力应变分析计算可得到。
图中的耙由耙柄303与其上面的等距的23个耙齿302组成。齿的间隔、个数、长度以及其上部的弯曲度可根据需要收集的对象的大小体积范围来选定的,可更换。而在带耳双排链307等隔布置的耙的个数也是可以变化的,而相隔的两个耙上的齿排布可以相错开,以达到更好的收集效果。
金属网203为斜网格结构,在市场上可直接买得。另外金属网必须防水防锈,或以用有足够强度的塑料网等代替。网孔的疏密程度可根据需要选取或更换。
5.轴支座309可以用现成的带座轴承代替;液压马达311可用直流电机代替。链条与链轮传动可同等更替为同步轮与同步带传动。其中耙和金属网203可固定在同步带上的孔或档块上。
液压马达311可用电机代替;主动链轮313的传动除了以上的论述方式外,左右对称的两个主动链轮313安装在一传动轴上,再由液压马达或电机直接或用皮带轮等带传动比来带动传动轴。
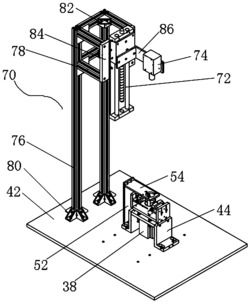
如图6、图7和图8所示,液压垂直升降装置122包括:升降横梁401、升降液压杆销402、升降液压杆403、升降液压缸404、升降液压缸固定铰405、船艏盖螺栓406、导轨固定螺栓407、导轨408、升降横梁顶块409、导轨滑轮410、导轨滑轮梢411;其连接关系是升降横梁401穿过铲斗型链网式收集传送装置103两护板201中,由两个升降横梁顶块409进行轴向定位;升降液压杆403一端通过升降液压杆销402与升降横梁401相连,一端与升降液压缸404相配合;升降液压缸404通过升降液压缸固定铰405固定在甲板107上;导轨滑轮410通过导轨滑轮梢411固定在护板201上,导轨滑轮410与导轨408相切;导轨408通过导轨固定螺栓407固定在船艏105上,船艏盖104通过船艏盖螺栓406固定在船艏105上。升降液压杆403和升降液压缸404可用直接电机代替。液压垂直升降装置122是用于调整铲斗型链网式收集传送装置的浸深。在水面垃圾清理船进入非工作模式即自由航行模式时,铲斗型链网式收集传送装置升起离开水面,从而减少航行时的水阻;当进入工作模式时,液压垂直升降装置让其又浸入适当深度。另一方面,由于船随着垃圾装载量的增加对船体浸深的影响以及为适应水面垃圾浸深的不同,使铲斗型链网式收集传送装置水平段更好地接触垃圾或收集不同水深的漂浮物,在铲斗型链网式收集传送装置两旁装有水位自适就装置。当铲斗型链网式收集传送装置水平段离水面过高或过深时,动作发出信号到铲斗型链网式收集传送装置的升降液压缸,调整其浸深。
如图9所示,水位自适应装置102包括:浮子导杆501、上静触点502、水位自适应装置外壳503、下静触点504、浮子505、动触点506、静触点螺丝507;上静触点502和下静触点504通过静触点螺丝507固定在水位自适应装置外壳503,动触点506穿插在浮子导杆501上;浮子505固定在浮子导杆501下端,浮子导杆501与水位自适应装置外壳503上的孔间隙配合。水位自适应装置的静触点分为上静触点502和下静触点504两个,形成一下非接触区域即控制边界。而连在浮子导杆501上的杆为动触点506,当铲斗型链网式收集传送装置浸深过深时,浮子被迫相对向上到达控制区域上边界,动静触点相接,接通电路,发出控制信号到液压垂直升降装置,使升降液压缸404工作,将铲斗型链网式收集传送装置提升到合适的位置,反之亦然。上下静触点螺丝507的相对相对距离可作调整,可使控制液位的上、下限范圈在25-100mm内进行有效调整。可适应波浪等水况不同的水域。水位自适应装置用于为液压垂直升降装置提供升降信号,使铲斗型链网式收集传送装置保持最佳工作浸深。
如图11和图12所示;导流装置与喷水装置106包括喷水管701、喷水管液压缸杆702、喷水管液压缸703、水泵704、水泵基台705、喷水管液压缸安装铰706、水平位置角度调整前液压缸杆707、水平位置角度调整前液压缸708、水泵进水管709、喷水装置底座110、水平位置角度调整柄711、水平位置角度调整后液压缸杆712、水平位置角度调整后液压缸713、喷水装置调整基座714、水泵出水管715、喷水管支柱716、水平位置角度调整液压缸滑杆717;其连接关系为:喷水管701前铰通过销与喷水管液压缸杆702连接,后铰通过销与喷水管支柱716连接;喷水管支柱716固定在喷水装置调整基座714;喷水管液压缸杆702与喷水管液压缸703套合连接,而喷水管液压缸703通过销与喷水管液压缸安装铰706连接;四个相隔的喷水管液压缸安装铰706固定在喷水装置调整基座714;水平位置角度调整前液压缸杆707一端与水平位置角度调整柄711配合连接,一端水平位置角度调整前液压缸708套合;六个相隔的水平位置角度调整柄711固定在喷水装置调整基座714;水平位置角度调整后液压缸杆712一端与水平位置角度调整柄711配合连接,一端水平位置角度调整后液压缸713套合;水平位置角度调整前液压缸708和水平位置角度调整后液压缸713套合在水平位置角度调整液压缸滑杆717上;水泵进水管709与水泵704进口端相接、水泵出水管715一端与水泵704出口端连接,一端与喷水管701连接;水泵704固定在基台705上,而基台705置于甲板107上。喷水管液压缸杆702和喷水管液压缸703、水平位置角度调整前液压缸杆707和水平位置角度调整前液压缸708,水平位置角度调整后液压缸杆712和水平位置角度调整后液压缸713可分别用直接电机代替。
液压控制自动转向的喷水装置能在水平方向和垂直方向两个方向上自由变换角度。垂直面上,利用喷水管液压缸杆702和喷水管液压缸703的伸缩来对喷水管的仰角进行调节。喷水管液压缸703可以与四个相隔的固定在喷水装置调整基座714上的喷水管液压缸安装铰706的其中一个接连,从而改为了喷水管喷射仰角的调节范围。水平方向上,水平位置角度调整前液压缸708和水平位置角度调整后液压缸713可在水平位置角度调整液压缸滑杆717上自由滑动,通过改变水平位置角度调整前液压缸杆707和水平位置角度调整后液压缸杆712的伸长量,差动伸缩,使喷水管喷射方向在水平方向上得到调节。从图中可以看到通过改变水平位置角度调整前液压缸杆707或水平位置角度调整后液压缸杆712与6个相隔的水平位置角度调整柄711的配合连接,实现自动摆角的范围调节。在船艏旁有液压控制自动转向的喷水装置,一方面将岸边滩涂上的垃圾冲刷下来,另一方面是将角落处等难以到达的地方的垃圾冲涌过来。另外,喷水装置所用的供水水泵的进水口置于铲斗型链网式收集传送装置背后,有助于导流,形成更好的工作流道,因此水泵及其进水管也就成了导流装置。
如图13、图14所示,卫星船收集装置110包括:栅带栓801、栅带802、卫星船推进器803、卫星船导轮804、卫星船导轮栓805、卫星船体806、挂接铰链807和卫星船挂钩808;其连接关系是栅带802通过栅带栓801连接在甲板107上;卫星船导轮804通过卫星船导轮栓805固定在卫星船体806上;栅带802的另一端连接于卫星船体806上的挂接铰链807;当卫星船不工作时,挂接铰链807挂于卫星船挂钩808;卫星船转角行程开关809安装在船身上,在栅带802和栅带栓801连接一端旁边。在船的两边有两只卫星船,通过卫星船体806前后的卫星船推进器803可以实现前进或后退,而卫星船导轮让其能沿着岸边行使。在前进时,通过带动与母船连接的栅带802慢速将船周围的垃圾推移到船前收集装置入口,大大加快收集效率,加强了灵活性。其中栅带802可在与母船连接的栅带栓801上滑动,让卫星船与母船的浸深有一定差异时作上下的自调整。卫星船导轮804是为了母船在靠岸工作模式时,卫星船将会碰触岸边,通过卫星船导轮804,则将会自动转向,沿着岸边继续前进,从而将岸边垃圾一网打进。由于在岸边时船体与岸的距离不一,所以设计中用软的栅带802。当卫星船工作时,由于挂接铰链807与栅带802最大的夹角为90°,即角A为0°,因此,保证了卫星船能沿切线方向牵引栅带802,从而让栅带802尽量张开。卫星船在工作时,当卫星船带动栅带802运动到与船身设定夹角150°~180°时,与卫星船转角行程开关809相接触,行程开关动作,切换卫星船电机的控制电路,让电机反转,让卫星船后退,直至复位到卫星船挂钩808上。卫星船在不工作时,会挂附在船壁上的卫星船挂钩808:当要启动卫星船工作,卫星船挂钩808会放下,松开卫星船;当子船返回停止工作时,靠上卫星船挂钩808的行程开头,卫星船挂钩808提起,将子船锁定。
垃圾处理系统包括切割装置121和压缩装置112。
在铲斗型链网式收集传送装置靠上端有一切割装置,将宽大的垃圾切割,以利于垃圾能顺利进入压缩装置。如图10所示,切割装置121包括切割装置架601、割片602、切割电机603;其连接关系为割片602安装在切割电机603轴上,切割电机603固定在切割装置架601上,而切割装置架601通过螺栓搭装在护板201。当铲斗型链网式收集传送装置传送工作时,切割装置才工作。在一些没有大件垃圾的水域可以不开启。
如图15所示,压缩装置112包括:垃圾脱落辅助耙901、卷筒左轴承座902、压缩箱903、卷筒904、压缩液压缸905、压缩液压缸杆906、缓存档卷907、压缩头连接销908、压缩头909、压缩箱水左流道918、卷筒右轴承座923、压缩箱水右流道924;其连接关系为:垃圾脱落辅助耙901通过螺栓固定在压缩箱903上;卷筒904通过卷筒左轴承座902和卷筒右轴承座923固定在压缩箱903一侧;缓存档卷907一端卷接在卷筒904上,一端固定在压缩头909上;滑动在压缩箱903底板和卸载板919的压缩头909通过压缩头连接销908连接在压缩液压缸杆906上,而压缩液压缸杆906套合在压缩液压缸905上;压缩液压缸905通过螺栓固定在船艏105上,而船艏105固定在甲板107上;压缩箱水左流道918和压缩箱水右流道924分别置于压缩箱903两侧,一端开口与卸载板919上的漏水孔相接,一端与甲板107的对接缺口对接。垃圾脱落辅助耙901的耙齿间隔与铲斗型链网式收集传送装置上的耙齿302相错,用于对铲斗型链网式收集传送装置传送过来的垃圾进行辅助脱落。缓存挡卷907,通过压缩箱903后板的槽与压缩头909相连。当压缩头909前进时,还继续从铲斗型链网式收集传送装置传送过来的垃圾会落在缓存挡卷907上,当压头回程时,缓存挡卷907与压缩箱903后板的槽作用,将垃圾刮到压缩区即压缩头909前。后板相当于刮板。垃圾压缩出来的水通过卸载板919上的漏水孔到达分别置于压缩箱903两侧的压缩箱水左流道918和压缩箱水右流道924再通过甲板107的对接缺口排出船外。
垃圾卸载系统包括垃圾卸载装置104、垃圾箱113、开篷装置119;
如图16、17所示,垃圾卸载装置104包括:卸载下连杆910、卸载液压杆911、卸载液压缸912、卸载液压缸铰913、卸载板杆914、卸载行程开关底座915、垃圾箱体916、卸载行程开关917、卸载板919、卸载上连杆920、卸载连杆轴921、卸载支杆922、垃圾箱吊环925;其连接关系为:卸载板919固定在两卸载板杆914上;卸载上连杆920一端与卸载板杆914铰接,一端与卸载下连杆910通过卸载连杆轴921铰接;卸载下连杆910的另一端与与卸载支杆922连接;两卸载支杆922固定在甲板107上。
如图17所示,卸载下连杆910、卸载板杆914、卸载上连杆920和卸载支杆922构成四连杆机构,此垃圾卸载装置巧妙地应用了四连杆机构的死点物质在非工作状态时能很好的自锁,让卸载板919锁合可靠,当压缩装置发出信号到垃圾卸载装置开启卸载板919,卸载液压杆911在进入卸载液压缸912的液压油推动下,只需很少的力即可推动连接着两并联四连杆机构的死点的卸载连杆轴921,从而打开卸载板919,让垃圾滑落到垃圾箱113。而卸载行程开关917则是用于当卸载板919开启到与之接触,则发出信号到控制箱111,经计算机等设备分析并输出控制信号民,停止输送液压油到卸载液压缸912。在适当的时间后,控制箱111发出信号抽出卸载液压缸912的液压油,从而让卸载液压杆911将卸载连杆轴921拉回死点,从而关闭卸载板919。卸载板919的开闭时间,应与压缩装置的工作状态相配合。
通过液压缸作为压力源的压缩头909将垃圾进行压缩,在几次垃圾的压缩后,当检测到压缩液压缸的压力过大及行程过小时,发出信号到垃圾卸载装置104,将压缩箱中的垃圾转移到垃圾收集箱完成回收工作。当收集箱装满后,返航回岸或由前来的辅助船,利用起吊机将垃圾箱113吊出并更换。利用简易可更换的垃圾箱113可使垃圾的转卸更加快捷简单。垃圾箱113由垃圾箱体916和垃圾箱吊环925构成,放置于甲板107的相应的凹位。现在的收集船的大多是将收集回来的垃圾直接收集到自身的船仓,垃圾的水份累积在船舱中,减少船的垃圾装载的能力。垃圾箱11底板加入漏水孔设计,经压缩后还有不彻底的水份可经这些漏水孔和下面的甲板107的单漏水孔流出到船外。利用简易可更换的垃圾箱113可使垃圾的转卸更加快捷简单。
为使船能在风雨中不影响工作,为其设计了顶篷1006。而当垃圾箱需要转卸时,即需要顶篷1006能自主打开。因此,设计了这一自动开篷的装置来控制顶篷1006的开闭。如图18~20所示;所述的开篷装置119包括:开篷电机1001、收篷棍1002、侧屏1003、开篷装置支梁1004、开篷导轨1005、顶篷1006、开篷导轮1007、顶篷导杆1008、收篷行程开关1009、收篷棍皮带轮1010、收篷棍皮带1011、收篷棍右轴承座1012、开篷装置底座1013、开篷电机皮带轮1014、收篷棍左轴承座1015;开篷电机1001通过螺栓固定在开篷装置底座1013;收篷棍皮带轮1010与收篷棍1002配合,通过收篷棍皮带1011与和开篷电机1001配合的开篷电机皮带轮1014相连;收篷棍1002通过收篷棍右轴承座1012和收篷棍左轴承座1015固定在开篷装置底座1013上,而开篷装置底座1013通过螺栓固定在开篷装置支梁1004上;行程开关1009固定在开篷导轨1005上;两个开篷导轨1005与四个开篷装置支梁1004固接,而四个开篷装置支梁1004固定在甲板107上;顶篷1006的一端从收篷棍1002接出,尾端与顶篷导杆1008连接在一起;开篷导轮1007置于顶篷导杆1008两侧,与开篷导轨1005相接触。开篷装置由开篷电机1001通过皮带传动,带动收篷棍1002收起顶篷1006。当碰到收篷行程开关1009后停止。顶篷1006的一端从收篷棍1002接出,尾端与顶篷导杆1008连接在一起;开篷导轮1007置于顶篷导杆1008两侧,可在开篷导轨1005上滑动。当需要放下顶篷时,电机作缓慢反转,在滑轮与杆的惯性力与收篷棍的推力下关闭。
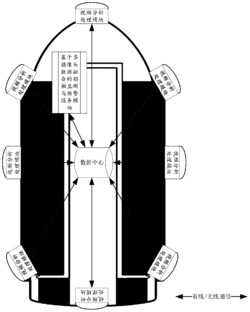
侦测系统包括监控摄像机120、船边传感器123和总控制箱(111)中的计算机、工控机等信号和图象处理分析控制等设备)。监控摄像机(120)固定在船艏盖(104)中央,其视角能大范围调整;甲板上的船边传感器(123)镶嵌安装在船板(107)的两侧,每侧两个相隔安装;监控摄像机(120)和船边传感器(123)的数据信号线都与总控制箱(111)(包括计算机、工控机等信号和图象处理分析控制等设备)相连通信。
如图22所示,水面垃圾清理船分成三种工作模式:自由航行模式、靠岸作业模式和非靠岸作业模式。当水面垃圾清理船在非工作模式时,如出航、回航或转换工作水域时,进入自由航行模式,全速启动推进器,航速可为6km/h。当开始工作时,进行侦测系统初始化,通过监控摄像机120采集水面图象,分析检测找出有垃圾的水域。若找到垃圾区域,则通过导航装置前往该水域,到达后切换到工作模式,而通过船上的船边传感器002,进行是否为靠岸状态等判断,从而选择进入靠岸作业模式或非靠岸作业模式。在靠岸工作模式时,液压自动转向射水装置配合工作,将岸上垃圾冲刷下来,并将在如角落处收集装置难以到达的地方的垃圾翻涌出来。由于靠岸工作模式航速较低,所以让铲斗型链网式传送带装置设为连续工作模式,以利于提高收集效果和收集能力。在海域等非靠岸工作模式时,液压自动转向射水装置不工作,而航速加快,为4km/h。航行时,垃圾相对船艏有一个向船艏方向的相对流速,有助于垃圾的快速收集。另外,由于水域的垃圾零散,可以将铲斗型链网式传送带装置设为间断工作模式。N mins后,重新采集图象判断是否还有垃圾。若还有,则调整船位置,继续清理。若已经清理完该区域,则配合导航装置,进入自由航行模式前往已监测视场之外区域,继续采集图象进行分析,进入下一个算法循环,当循环次数k超过给定的搜索次数,则停止工作,进入自由航行模式,回航。
当侦测系统检测到垃圾水域时,由导航系统让水面垃圾清理船到达该水域,液压垂直升降装置122将铲斗型链网式收集传送装置103降入水中。铲斗型链网式收集传送装置根据垃圾的量,可以实现连续工作或间歇工作模式。例如当垃圾量不多,以及在非靠岸工作模式时,可以让铲斗型链网式收集传送装置103进入间歇工作模式,即铲斗型链网式收集传送装置液压马达311不开启,当收集到一定量时再开启,将垃圾传送到垃圾处理系统。通过连续工作或间歇工作模式两种模式的切换,使回收更加节能有效。
水面垃圾清理船专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0