










专利摘要
一种磁流变流体离合器设备,包括输入转子,适于耦接到动力输入件,输入转子具有第一组至少一个输入剪切面和第二组至少一个输出剪切面。输出转子可旋转地安装在输入转子周围,以围绕与输入转子的公共轴线旋转,输出转子具有第一组至少一个输出剪切面和第二组至少一个输出剪切面,输入转子和输出转子的第一组由至少第一环形空间隔开并形成第一传动组,输入转子和输出转子的第二组由至少第二环形空间隔开并形成第二传动组。磁流变流体位于每个环形空间中,MR流体配置为当经受磁场时在输入转子和输出转子的组之间产生可变量的扭矩传递。一对电磁铁配置为通过MR流体传递磁场,电磁铁配置为改变磁场的强度,由此驱动这对电磁铁中的至少一个使得扭矩从至少一个输入转子传递至输出转子。
权利要求
1.一种磁流变流体离合器设备,包括:
至少一个输入转子,适于耦接到动力输入件,所述输入转子具有第一组至少一个输入剪切面和第二组至少一个输入剪切面,所述输入转子的第一组和第二组同时地在同一方位上旋转;
输出转子,能旋转地安装在所述输入转子周围,以用于围绕与所述输入转子的公共轴线旋转,所述输出转子具有第一组至少一个输出剪切面和第二组至少一个输出剪切面,所述输入转子和所述输出转子的第一组通过至少第一环形空间隔开并形成第一传动组,所述输入转子和所述输出转子的第二组通过至少第二环形空间隔开并形成第二传动组;
磁流变流体,位于每个环形空间中,所述磁流变流体配置为当经受磁场时在所述输入转子和所述输出转子的组之间形成能变化的量的扭矩传递;以及
一对电磁铁,具有与所述第一传动组相关联的第一电磁铁,以及与所述第二传动组相关联的第二电磁铁,这些电磁铁配置为通过所述磁流变流体传递磁场,这些电磁铁配置为改变该磁场的强度;
从而驱动所述一对电磁铁中的至少一个电磁铁使得扭矩从至少一个所述输入转子传递至所述输出转子。
2.根据权利要求1所述的磁流变流体离合器设备,其中,所述第一组至少一个输入剪切面和所述第二组至少一个输入剪切面中的每一者均是第一输入筒和第二输入筒的一部分,并且进一步地,其中,每个输出剪切面中的至少一个均是第一输出筒和第二输出筒的一部分,每个传动组中的输入剪切面和输出剪切面缠绕在一起。
3.根据权利要求1和2中任一项所述的磁流变流体离合器设备,其中,所述至少第一环形空间是第一磁流变流体腔室的一部分,并且进一步地,其中,所述至少第二环形空间是第二磁流变流体腔室的一部分。
4.根据权利要求3所述的磁流变流体离合器设备,其中,每个磁流变流体腔室均具有膨胀系统。
5.根据权利要求4所述的磁流变流体离合器设备,其中,所述膨胀系统包括位于所述输出转子的外部上的至少一个柔性构件,所述至少一个柔性构件形成与一个磁流变流体腔室流体连通的膨胀袋。
6.根据权利要求1和2中任一项所述的磁流变流体离合器设备,其中,每个电磁铁包括至少两个独立线圈。
7.根据权利要求2所述的磁流变流体离合器设备,其中,输入筒和输出筒中的一个在其面向环形空间的至少一个表面中具有螺旋形通道,所述环形空间与流体腔室空间流体连通,从而当所述输入转子旋转时,所述螺旋形通道在所述环形空间与所述流体腔室空间之间引起所述磁流变流体的流动。
8.根据权利要求7所述的磁流变流体离合器设备,其中,所述流体腔室空间通过所述输入筒的径向壁中的至少一个孔与所述环形空间隔开。
9.根据权利要求1和2中任一项所述的磁流变流体离合器设备,其中,至少一个所述输入转子包括两个输入转子,其中第一输入转子与所述第一传动组相关联,第二输入转子与所述第二传动组相关联。
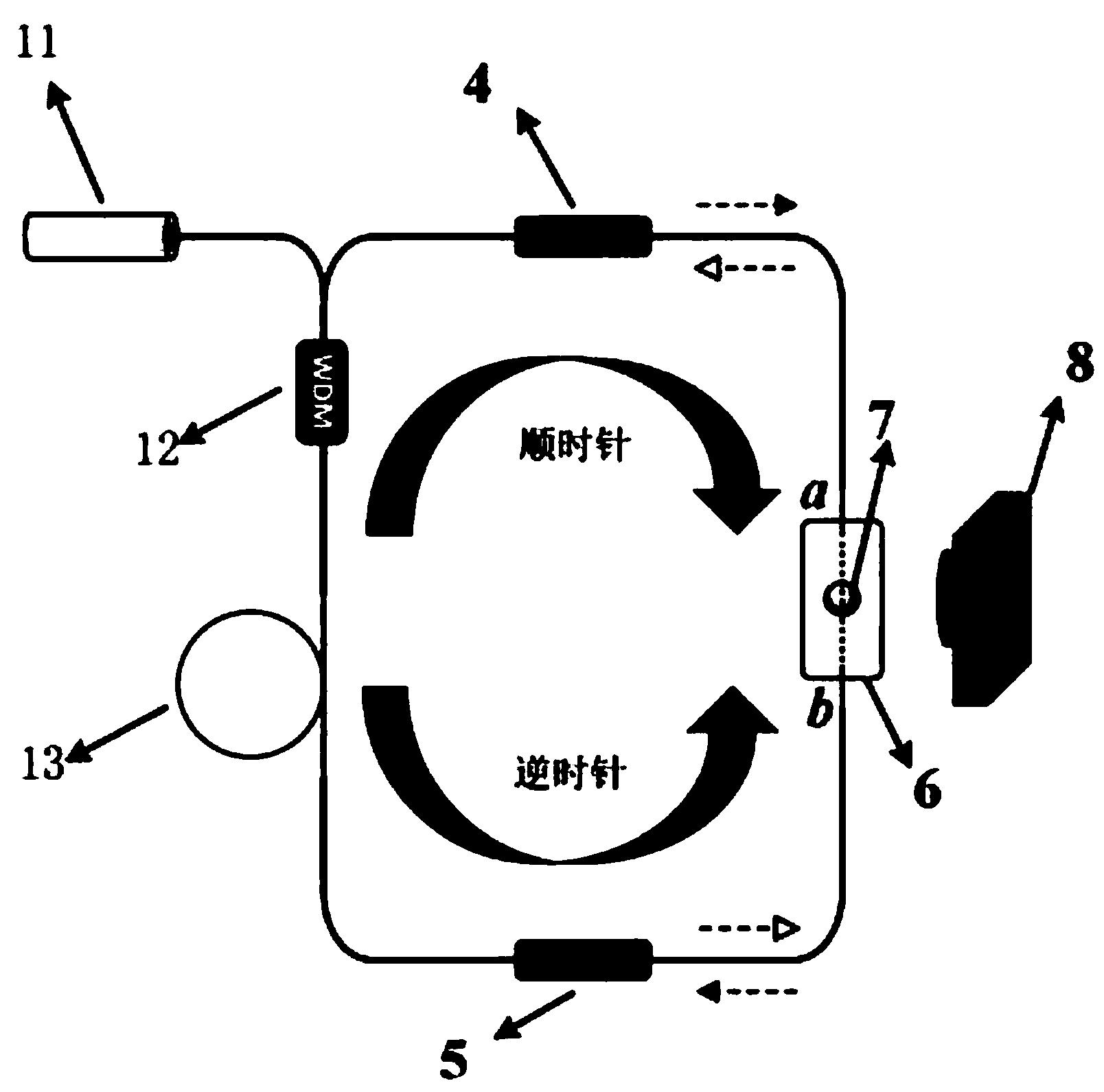
10.根据权利要求9所述的磁流变流体离合器设备,其中,所述第一输入转子接收顺时针输入,并且进一步地,其中,所述第二输入转子接收逆时针输入。
11.根据权利要求9所述的磁流变流体离合器设备,其中,所述第一输入转子接收旋转输入,并且进一步地,其中,所述第二输入转子是固定的。
12.根据权利要求1和2中任一项所述的磁流变流体离合器设备,其中,所述一对电磁铁共用公共磁芯,所述公共磁芯固定至所述输出转子。
13.一种磁流变流体离合器设备,包括:
至少一个输入转子,适于耦接到动力输入件,所述输入转子具有至少第一组至少一个输入筒;
输出转子,能旋转地安装在所述输入转子周围,以用于围绕与所述输入转子的公共轴线旋转,所述输出转子具有至少第一组至少一个输出剪切面,所述输入转子和所述输出转子的第一组通过至少第一环形空间隔开并形成第一传动组;
流体腔室空间,与所述环形空间流体连通,
至少一个表面凹陷通道,位于所述至少一个输入筒和所述至少一个输出剪切面中的一个的面向所述环形空间的表面中;
磁流变流体,位于所述环形空间中,所述磁流变流体配置为当经受磁场时在所述输入转子与所述输出转子的组之间形成能变化的量的扭矩传递;以及
至少一个电磁铁,配置为通过所述磁流变流体传递磁场,所述至少一个电磁铁配置为改变该磁场的强度,从而驱动所述至少一个电磁铁使得扭矩从至少一个所述输入转子传递至所述输出转子;
从而当所述输入转子旋转时,所述表面凹陷通道在所述环形空间与所述流体腔室空间之间引起所述磁流变流体的流动。
14.根据权利要求13所述的磁流变流体离合器设备,其中,所述第一组至少一个输入筒中的每个包括多个输入筒,并且其中,至少一个输出剪切面是第一输出筒的一部分,所述输入筒和所述输出剪切面缠绕在一起。
15.根据权利要求13和14中任一项所述的磁流变流体离合器设备,其中,所述至少第一环形空间是第一磁流变流体腔室的一部分。
16.根据权利要求15所述的磁流变流体离合器设备,其中,所述第一磁流变流体腔室具有膨胀系统。
17.根据权利要求16所述的磁流变流体离合器设备,其中,所述膨胀系统包括位于所述输出转子的外部上的至少一个柔性构件,所述至少一个柔性构件形成与所述第一磁流变流体腔室流体连通的膨胀袋。
18.根据权利要求13和14中任一项所述的磁流变流体离合器设备,其中,所述至少一个电磁铁包括至少两个独立线圈。
19.根据权利要求13和14中任一项所述的磁流变流体离合器设备,其中,至少一个所述输入转子接收轴向动力输入,所述输出转子具有用于传递动力输出的轴向定位的连接器和径向连接器中的一个。
20.根据权利要求13和14中任一项所述的磁流变流体离合器设备,其中,至少一个所述输入转子包括两个输入转子,其中第一输入转子与所述第一传动组相关联,第二输入转子与第二传动组相关联。
21.根据权利要求20所述的磁流变流体离合器设备,其中,所述第一输入转子接收旋转输入,并且进一步地,其中,所述第二输入转子是固定的。
22.根据权利要求13和14中任一项所述的磁流变流体离合器设备,其中,所述至少一个表面凹陷通道是至少一个螺旋形通道。
说明书
相关申请的交叉引证
本申请要求2014年1月31日提交的美国专利申请第61/934,141号的优先权。
技术领域
本发明总体上涉及磁流变(MR)流体离合器设备,更特别地,涉及用于各种应用的这种设备的构造。
背景技术
磁流变(MR)流体离合器设备已知是用于精确且精准地(也具有其他优点)从驱动轴传递运动的有用的设备。因此,越来越多的应用考虑使用MR流体离合器设备。为此,希望改变现有的MR流体离合器设备,以使其符合其设定应用的安全标准,例如在冗余度方面。
发明内容
本公开的目的是,提供解决与现有技术相关的问题的磁流变(MR)流体离合器设备。
本公开的另一目的是,提供新颖的具有磁流变(MR)流体离合器设备的控制系统。
因此,根据本公开的第一实施例,提供一种磁流变流体离合器设备,其包括:至少一个输入转子,适于耦接到动力输入件,输入转子具有第一组至少一个输入剪切面和第二组至少一个输出剪切面;输出转子,可旋转地安装在输入转子周围,以围绕与输入转子的公共轴线旋转,输出转子具有第一组至少一个输出剪切面和第二组至少一个输出剪切面,输入转子和输出转子的第一组由至少第一环形空间隔开并形成第一传动组,输入转子和输出转子的第二组由至少第二环形空间隔开并形成第二传动组;每个环形空间中的磁流变流体,MR流体配置为当经受磁场时在输入转子和输出转子的组之间产生可变量的扭矩传递;以及一对电磁铁,第一电磁铁与第一传动组相关联,第二电磁铁与第二传动组相关联,这些电磁铁配置为通过MR流体传递磁场,电磁铁配置为改变磁场的强度;从而驱动这对电磁铁中的至少一个使得扭矩从至少一个输入转子传递至输出转子。
进一步,根据第一实施例,第一组输入剪切面和第二组输入剪切面中的每一者均是第一输入筒和第二输入筒的一部分,进一步,其中,每个输出剪切面中的至少一个均是第一输出筒和第二输出筒的一部分,每个传动组的输入和输出剪切面缠绕在一起。
再进一步,根据第一实施例,至少第一环形空间是第一磁流变流体腔室的一部分,进一步,其中,至少第二环形空间是第二磁流变流体腔室的一部分。
再进一步,根据第一实施例,每个磁流变流体腔室具有膨胀系统。
再进一步,根据第一实施例,膨胀系统包括位于输出转子的外部上的至少一个柔性构件,其形成与一个磁流变流体腔室流体连通的膨胀袋。
再进一步,根据第一实施例,每个电磁铁包括至少两个独立线圈。
再进一步,根据第一实施例,输入筒和输出筒中的一个在其面向环形空间的至少一个表面中具有螺旋形通道,环形空间与流体腔室空间流体连通,由此,当输入转子旋转时,螺旋形通道在环形空间和流体腔室空间之间引起磁流变流体的流动。
再进一步,根据第一实施例,流体腔室空间通过输入筒的径向壁中的至少一个孔与环形空间隔开。
再进一步,根据第一实施例,该至少一个输入转子包括两个输入转子,第一输入转子与第一传动组相关联,第二输入转子与第二传动组相关联。
再进一步,根据第一实施例,第一输入转子接收顺时针输入,进一步,其中,第二输入转子接收逆时针输入。
再进一步,根据第一实施例,第一输入转子接收旋转输入,进一步,其中,第二输入转子是固定的。
再进一步,根据第一实施例,这对电磁铁共用公共磁芯,该公共磁芯固定至输出转子。
根据本公开的第二实施例,提供一种磁流变流体离合器设备,其包括:至少一个输入转子,其适于耦接到动力输入件,输入转子具有至少第一组至少一个输入筒;输出转子,其可旋转地安装在输入转子周围,以围绕与输入转子的公共轴线旋转,输出转子具有至少第一组至少一个输出剪切面,第一组输入转子和输出转子由至少第一环形空间隔开并形成第一传动组;流体腔室空间,与环形空间流体连通;至少一个表面凹陷通道,位于该至少一个输入筒和该至少一个输出剪切面中的一个的面向环形空间的表面中;环形空间中的磁流变流体,MR流体配置为当经受磁场时在输入转子和输出转子的多个组之间产生可变量的扭矩传递;以及至少一个电磁铁,其配置为通过MR流体传递磁场,该至少一个电磁铁配置为改变磁场的强度,由此,驱动该至少一个电磁铁使得扭矩从至少一个输入转子传递至输出转子;由此,当输入转子旋转时,表面凹陷部在环形空间和流体腔室空间之间引起磁流变流体的流动。
进一步,根据第二实施例,每个第一组至少一个输入筒包括多个输入筒,其中,至少一个输出剪切面是第一输出筒的一部分,输入筒和输出剪切面缠绕在一起。
再进一步,根据第二实施例,该至少第一环形空间是第一磁流变流体腔室的一部分。
再进一步,根据第二实施例,其中,磁流变流体腔室具有膨胀系统。
再进一步,根据第二实施例,膨胀系统在输出转子的外部上包括至少一个柔性构件,其形成与磁流变流体腔室流体连通的膨胀袋。
再进一步,根据第二实施例,该至少一个电磁铁包括至少两个独立线圈。
再进一步,根据第二实施例,该至少一个输入转子接收轴向动力输入,输出转子具有用于传递动力输出的轴向定位的连接器和径向连接器中的一个。
再进一步,根据第二实施例,该至少一个输入转子包括两个输入转子,第一输入转子与第一传动组相关联,第二输入转子与第二传动组相关联。
再进一步,根据第二实施例,第一输入转子接收旋转输入,进一步,其中,第二输入转子是固定的。
再进一步,根据第二实施例,该至少一个表面凹陷通道是至少一个螺旋形通道。
根据本公开的第三实施例,提供一种驱动系统,其包括:四个动力源,每个动力源产生一个旋转动力度(degree of rotational power);第一动力轴,连接至所述动力源中的两个,以用于接收旋转动力度以便在第一方位上旋转,其中这两个旋转动力度中的一个是冗余的;第二动力轴,连接至所述动力源中的另外两个,以用于接收在与所述第一方位相反的第二方位上的旋转动力度,其中这两个旋转动力度中的一个是冗余的;位于第一动力轴上的至少一个磁流变流体离合器设备,其可驱动以至少部分地输出从第一动力轴接收的在第一方位上的旋转动力;位于第二动力轴上的至少一个磁流变流体离合器设备,其可驱动以至少部分地输出从第二动力轴接收的在第二方位上的旋转动力;以及至少一个连杆,其与第一动力轴上和第二动力轴上的磁流变流体离合器设备连接,以在驱动磁流变流体离合器设备时往复移动。
进一步,根据第三实施例,第一动力轴上和第二动力轴上具有多个磁流变流体离合器设备,形成位于所述第一动力轴上的一个磁流变流体离合器设备和位于所述第二动力轴上的一个磁流变流体离合器设备的多个对,通过相应的一个连杆互相连接。
再进一步,根据第三实施例,在每个动力源和相应的一个动力轴之间设置单向离合器。
再进一步,根据第三实施例,在每个动力源和相应的一个动力轴之间设置直角变速箱。
再进一步,根据第三实施例,四个动力源由两个马达形成,每个马达具有两个驱动轴。
更进一步,根据第三实施例,四个动力源由四个马达形成。
根据本公开的第四实施例,提供一种驱动系统,其包括:至少一个动力源,其产生一个旋转动力度;动力轴,连接至所述动力源,以用于接收旋转动力度以便在第一方位上旋转;位于动力轴上的至少一对磁流变流体离合器设备,每个磁流变流体离合器设备可驱动以经由输出臂至少部分地输出从动力轴接收的旋转动力;以及至少一个连杆,其具有输出端、从输出端延伸至与这对磁流变流体离合器设备的一个磁流变流体离合器设备的输出臂连接的第一接头的第一子连杆、从输出端延伸至与这对磁流变流体离合器设备的另一磁流变流体离合器设备的输出臂连接的第二接头的第二子连杆,第一接头和第二接头位于穿过动力轴的轴线和输出端的平面的相对侧上;由此,输出端在驱动磁流变流体离合器设备时往复移动。
进一步,根据第四实施例,提供多对磁流变流体离合器设备,所述每对磁流变流体离合器设备具有一个连杆,该多对磁流变流体离合器设备共用动力轴。
更进一步,根据第四实施例,动力源是单个马达。
根据本公开的第五实施例,提供一种驱动系统,其包括:两个旋转单元,每个旋转单元包括:动力源,其产生一个旋转动力度;磁流变流体离合器设备,其从动力源接收旋转动力并可驱动以至少部分地输出从动力源接收的旋转动力;以及至少一个共用输出臂,其与两个旋转单元的磁流变流体离合器设备连接,该共用输出臂在驱动任一或两个磁流变流体离合器设备时移动。
进一步,根据第五实施例,变速箱在每个旋转单元中位于动力源和磁流变流体离合器设备之间。
更进一步,根据第五实施例,一个旋转单元使得共用输出臂顺时针移动,另一个旋转单元使得共用输出臂逆时针移动。
更进一步,根据第五实施例,每个所述旋转单元的动力源是双向动力源。
根据本公开的第六实施例,提供一种驱动系统,其包括:至少两个独立旋转单元,每个旋转单元包括:动力源,其产生一个旋转动力度;磁流变流体离合器设备,其从动力源接收旋转动力并可驱动以至少部分地输出从动力源接收的旋转动力;连杆,其与磁流变流体离合器设备连接以接收输出;以及共用旋转单元,其包括:共用动力源,其产生一个旋转动力度;动力轴,其从共用动力源接收旋转动力;磁流变流体离合器设备,其用于该至少两个独立旋转单元中的每个,从共用动力源接收旋转动力并可驱动以至少部分地输出从共用动力源接收的旋转动力;其中,该至少两个独立旋转单元中的每个的连杆与共用旋转单元的一个专用的磁流变流体离合器设备连接,以从共用旋转单元接收旋转动力。
进一步,根据第六实施例,变速箱在每个旋转单元中位于动力源和磁流变流体离合器设备之间。
更进一步,根据第六实施例,一个独立旋转单元产生顺时针旋转,共用旋转单元产生逆时针旋转。
更进一步,根据第六实施例,独立旋转单元和共用旋转单元均在共同方位上产生旋转,共用旋转单元的旋转动力度是冗余的。
更进一步,根据第六实施例,至少一个所述旋转单元的动力源是双向动力源。
附图说明
图1A示出了根据一个实例实施例的磁流变(MR)流体离合器设备在没有磁场时的工作原理;
图1B示出了当经受合适磁场时的图1A的MR流体离合器设备;
图2A示出了根据本公开的一个实施例的用于轴向轴的轴向输入和输出的MR流体离合器设备的透视图;
图2B是图2A的MR流体离合器设备的输入转子的剖视透视图;
图2C是用于图2B的输入转子的筒的螺旋形通道的放大透视图;
图2D是图2A的MR流体离合器设备的输出转子的剖视透视图;
图2E是图2D的输出转子的输出壳体的剖视装配图
图2F是图2A的MR流体离合器设备的放大剖视图;
图2G是图2F的剖视图的进一步放大的视图,聚焦于筒相关性;
图2H和2I示出了图2A-2G的MR流体离合器设备的实例磁场;
图2J是图2A-2G的MR流体离合器设备的剖视图,示出了MR流体流;
图3是根据本公开的另一实施例的MR流体离合器设备,具有用于输出件上的径向连接器的两个独立的轴向输入件;
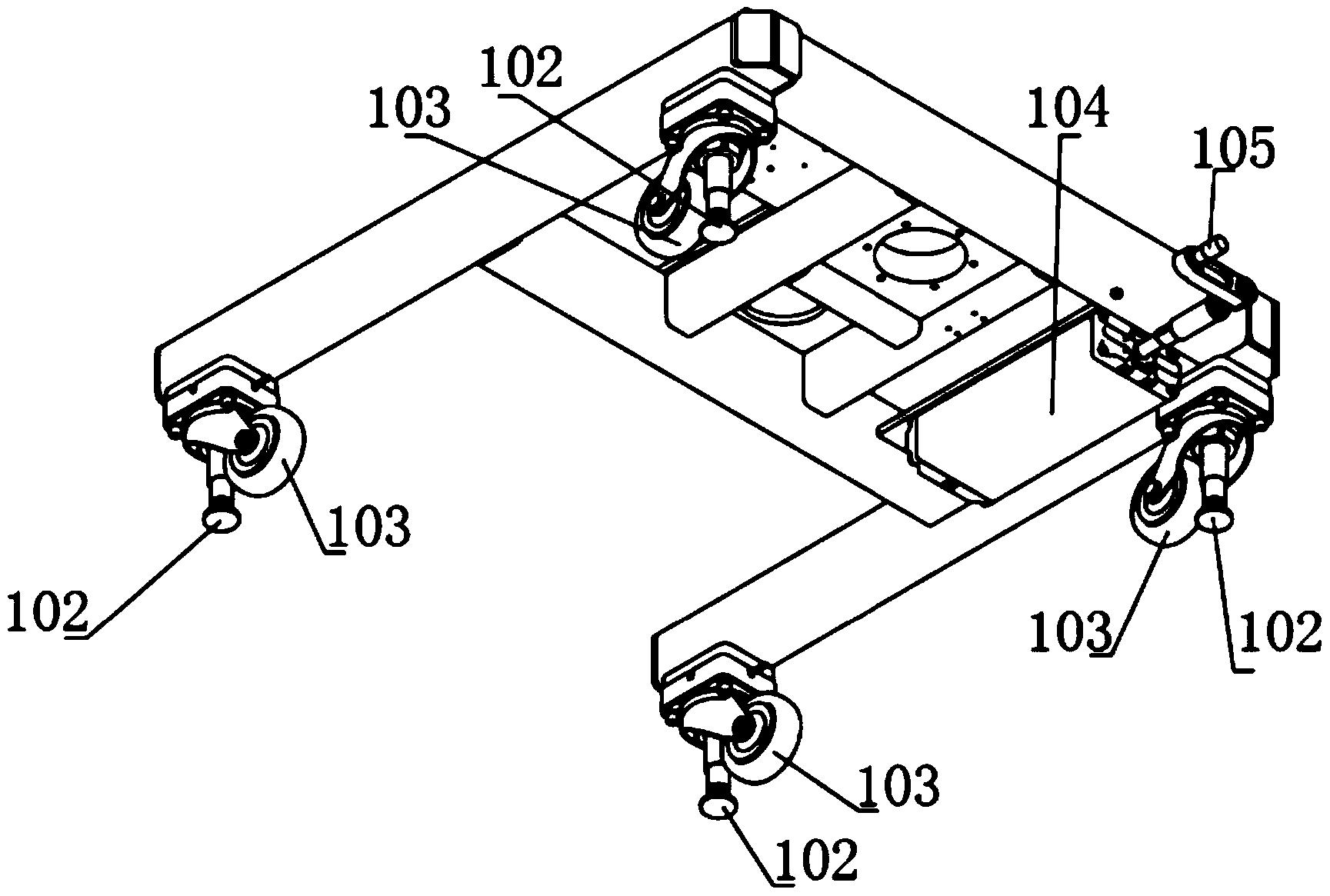
图4A是受控滑动驱动(CSA)系统的示意性顶视图,其包含MR流体离合器设备,例如图2A-2D的MR流体离合器设备;
图4B是图4A的CSA系统的透视图;
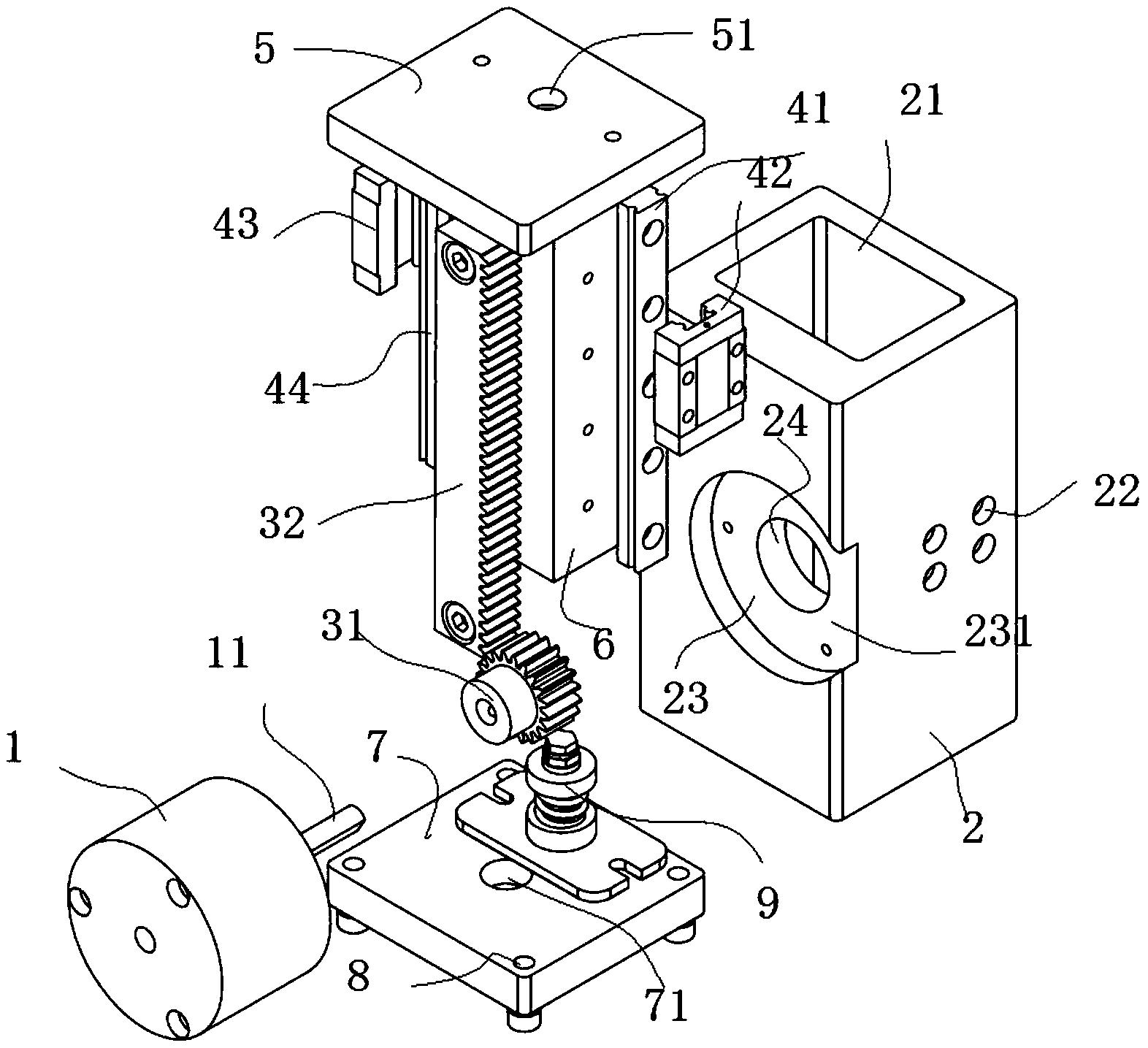
图5是CSA系统的一个替代实施例,其包含MR流体离合器设备,例如图2A-2D的MR流体离合器设备;
图6是离合器冗余旋转马达(CRRM)系统的透视图,其包含MR流体离合器设备,例如图2A-2D的MR流体离合器设备;并且
图7是CRRM系统的一个替代实施例的示意性顶视图,其包含MR流体离合器设备,例如图2A-2D的MR流体离合器设备。
具体实施方式
参考附图,更特别地,参考图1A和1B,示出了磁流变(MR)流体离合器设备10的工作原理,其配置为基于接收到的输入电流来提供机械输出力。
如将在下面的各种构造中更详细地说明的,MR流体离合器设备10可响应于从操作员接收的输入电流来提供输出力,以传递输入力。例如,图1A和1B示出了根据一个实例实施例的MR流体离合器设备10的实例概念图。实例MR流体离合器设备10的特征是驱动构件12和从动构件14,该驱动构件和从动构件由填充有MR流体16的间隙隔开。在图1A和1B的实例中,驱动构件12可与动力输入件机械连通,从动构件14可与动力输出件(即,力输出、扭矩输出)机械连通。MR流体16是智能流体的类型,其由设置在载体流体(通常是油的类型)中的可磁化的颗粒组成。当经受磁场时,流体可增加其表观粘度,并可能增加至变成粘塑性固体的点。表观粘度由包含在相对剪切面之间的MR流体的操作剪切应力与操作剪切速率的比值定义。磁场强度主要影响MR流体的屈服剪切应力。当处于其激活(“开”)状态时,可经由控制器的使用,通过改变电磁铁(未在图1A和1B中示出)产生的磁场强度,即输入电流,来控制流体的屈服剪切应力。因此,可用电磁铁控制MR流体传递力的能力,从而用作构件12与14之间的离合器。电磁铁单元配置为改变磁场的强度,使得构件12与14之间的摩擦足够低,以允许驱动构件12与从动构件14自由旋转,反之亦然。
图1A示出了当MR流体16经受少量磁通量或未经受磁通量时的MR流体离合器设备10,而图1B示出了当MR流体16经受更大磁通量时的MR流体离合器设备10。因此,图1A的实例可允许构件12和14之间相对独立的运动,而图1B的实例可限制构件12和14之间的运动。因此,MR流体离合器设备10可通过改变使MR流体16暴露于其中的磁通量的量,来改变响应于接收到的输入而提供的力的量。特别地,MR流体离合器设备10可通过改变基于输入力的磁通量的量,而基于输入力来提供输出力。另外,与一些其他离合器相比,MR流体离合器设备10可能不太容易出现部件故障,这是因为与传统离合器相比,MR流体16在构件12和14之间的摩擦可能更小。
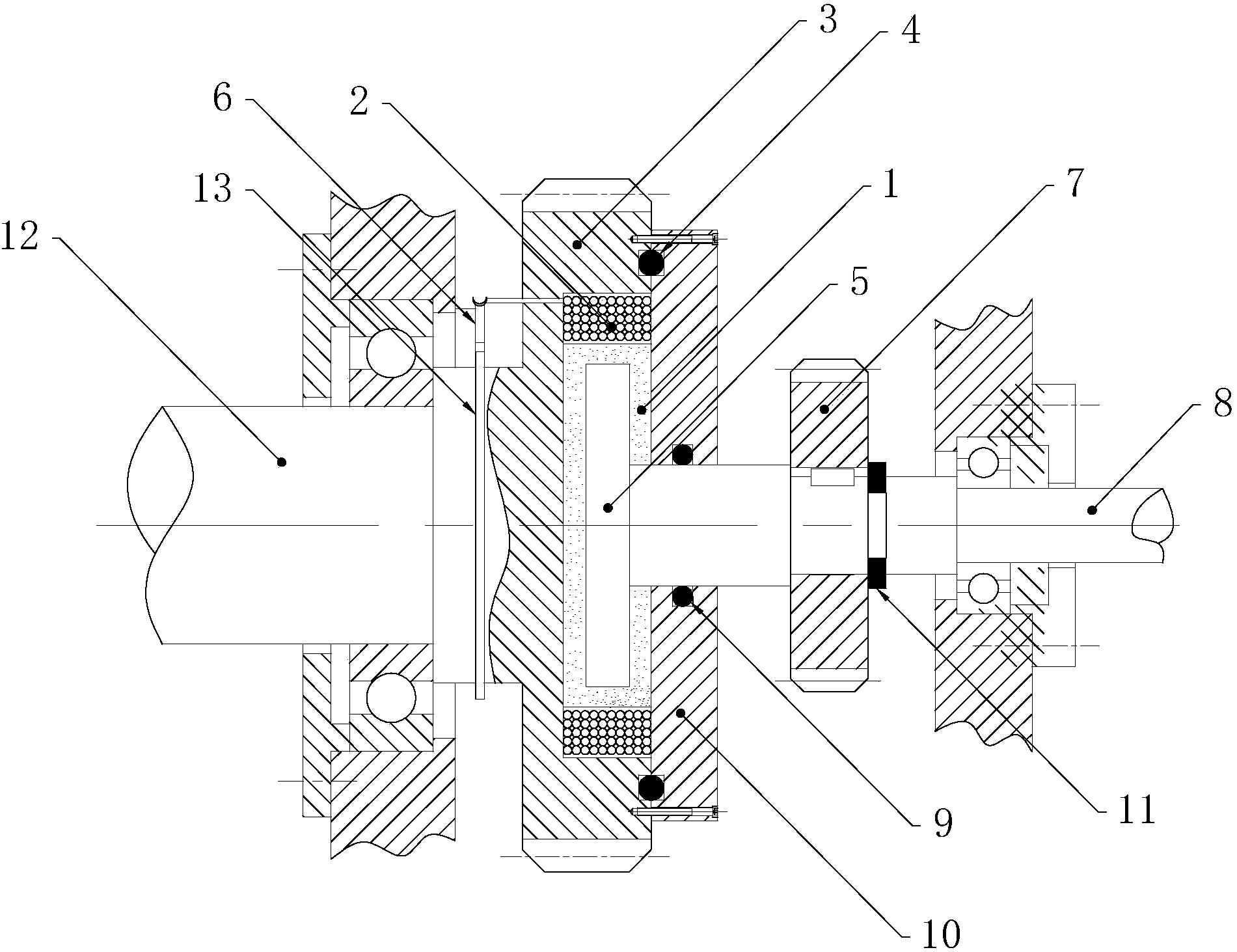
图2A至2J示出了MR流体离合器设备10’的一个实施例,提供了图1A和1B的系统10以外的额外细节。图2A示出了MR流体离合器设备10’的透视图。图2B和2C示出了驱动构件12,而图2D和2E示出了彼此分离的从动构件14。图2F示出了图2A的MR流体离合器设备10’的剖视图。图2G示出了图2F的剖视图的详细视图。
MR流体离合器设备10’的特征是驱动构件12、从动构件14和固定至从动构件14的电磁铁单元18,MR流体16设置在驱动构件12和从动构件14之间。在图2A-2J的实例中,驱动构件12用具有轮轴20的输入转子代表,驱动构件12可通过该轮轴与轴等旋转动力输入件连接。因此,驱动构件12可从动力装置(例如马达)接收旋转能量(扭矩)。驱动构件12进一步包括环形缘21,其通过辐条22径向地支撑在轮轴20周围。这是一种可能的构造,环形缘21还可通过盘状件与轮轴20连接,或是采取其他布置方式。驱动构件12围绕轴线CL旋转。
一对凸缘23A和23B(也叫做径向壁)从环形缘21径向地伸出,然而替代地也可存在单个凸缘23。凸缘23A和23B分别具有多个同心环形筒24A或24B。在图2A至2D的实施例中,凸缘23A和23B布置为使其相应的环形筒24A-B的组面向彼此,然而也可认为其他布置方式是良好的。环形筒24A-B固定至凸缘23A-B。在一个实施例中,在凸缘23A和23B中限定(例如,机加工、铸造、模塑等)同心圆形通道,以在其中插入筒24A/24B。可用紧配合(例如压配合)、粘合剂和/或径向销将筒24A/24B固定在其相应的凸缘23A-23B中。在所示实施例中,凸缘23A-B与轮轴20、环形缘21和辐条22一体地(monolithically)连接,由此,当从动力源接收驱动时,驱动构件12的各个部件同时旋转。
如图2C所示,可在筒24A和24B的一个或多个表面中限定螺旋形通道25。通道25被称为是螺旋形的,这是因为当某物沿着通道25移动时,通道25具有变化的轴向尺寸。螺旋形通道25组成MR流体的路径。实际上,这组筒24A和24B中的通道25在MR流体腔室中产生MR流体16的泵吸作用。因此,MR流体腔室中的大部分MR流体参与扭矩的传递,这帮助增加MR流体离合器设备10’的使用寿命。通道在包含于这组筒24A和24B中的每个筒的两个环形表面上是右旋的(或左旋的)。环形凸缘23A和23B中存在一些孔26(图2B),使得内部MR流体流动是可能的,如下文中说明的。
各个轴承30安装至驱动构件12并可旋转地支撑从动构件14,使得当驱动离合器设备10以传递旋转运动时,从动构件14可以旋转,如下文中描述的。还可在驱动构件12和从动构件14之间的界面处设置密封件31,以保持构件12和14之间的MR流体16。此外,密封件31设置成防止MR流体到达轴承30或从设备10’漏出。
而且,在此实例中,从动构件14用输出壳体40代表,也叫做输出转子,配置为也围绕轴线CL旋转。输出壳体40可耦接到各个机械部件,当驱动离合器设备10’以传递至少一部分旋转动力输入时,这些机械部件接收所传递的动力输出。输出壳体40具有第一环形半部40A和第二环形半部40B,该第一环形半部和第二环形半部通过相应的凸缘41A和41B及紧固件42互相连接。轮轴43固定至第二环形半部40B,以随着其旋转。从动构件14经由轮轴43与机械部件连接,由此,紧固件43A设置成使轮轴43与这种机械部件(未示出)耦接。
从动构件14还具有一对同心环形筒44A或44B的组,其分别安装至环形支撑部45A和45B。环形支撑部45A和45B固定至电磁铁单元18的磁芯,如下文中描述的(例如通过压入配合、胶水、销钉等)。环形筒44A和44B以这样的方式隔开,该方式使得环形筒24A和24B的组以相互缠绕(intertwined)的方式配合在环形筒44A和44B之间的环形空间内。当驱动构件12和从动构件14中的任一个或两个旋转时,由于环形筒24A、24B、44A和44B围绕轴线CL的同心性的原因,环形筒24A和24B与环形筒44A和44B之间没有直接接触。
驱动构件12的环形筒24A和从动构件14的环形筒44A之间的环形空间填充有MR流体16。同样地,驱动构件12的环形筒24B和从动构件14的环形筒44B之间的环形空间填充有MR流体16。然而,相应的环形空间(流体腔室)彼此隔开,即,MR流体16可不会从一个环形空间流至另一个环形空间。根据一个实施例,环形空间在筒24A和24B的组的面向的表面之间(即,在径向的方向上)具有0.25mm+/-0.05mm的宽度。该环形空间宽度范围仅提供作为一个非专有实例,在考虑各种因素,例如总扭矩、零件尺寸,等等的情况下,也可考虑其他环形空间宽度。每组筒24和44(即,一个组24A和44A,另一组24B和44B)之间的环形空间是由密封件31密封的MR流体腔室的一部分。MR流体离合器设备10具有两个MR流体腔室,一个用于筒24A/44A,另一个与筒24B/44B相关联。因此,如果MR流体从一个腔室漏出,那么另一腔室仍可能是起作用的,从而增加冗余度。
如在图2D和2E中最佳地看到的,输出壳体40对每个MR流体腔室限定膨胀系统,以补偿压力变化。根据一个实施例,膨胀系统在壳体40中包括通孔46。通孔46与MR流体腔室流体连通,以使MR流体通过。柔性膜47通过支架48固定至壳体40的外部,与通孔46相对。因此,柔性膜47可变形以形成膨胀袋。限定于环形凸缘23A和23B中的孔26允许MR流体从这组筒24A/44A、24B/44B之间的环形空间流出,以到达膨胀袋。还可在壳体40的外表面上设置翅片49,以帮助从MR流体腔室中的MR流体排出热量。
除了筒顶端的端部处的空间,以及筒24A和24B与剪切面(其是壳体40或磁芯80的一部分)之间的空间以外,MR流体腔室包括这组筒24A/44A、24B/44B之间的环形空间。MR流体腔室还可包括空间60A和60B,其定位成与环形凸缘23A和23B相对。根据一个实施例,如图2J所示,MR流体的流MRFF如下所述。当驱动构件12旋转时,螺旋形通道25产生一些泵吸作用,通过该泵吸作用,MR流体16在到达筒24和44的端部之后,在径向向外的方向上移动。在超过最外面的筒24时,MR流体可直接穿过环形凸缘23的径向边缘并进入空间60。MR流体将径向地向内移动,以经由孔26回到环形空间。空间60与膨胀系统流体连通。
MR流体以上述方式的运动允许MR流体在MR流体腔室中循环。通过在筒24的表面上的螺旋形通道25的存在来实现该运动。在筒24/44中的任一个上还可使用其他表面凹陷部,以在MR流体腔室中引起泵吸作用,即,另外的平滑柱形表面中的一些形式的腔体、凸起或通道。
参考图2H-2J,电磁铁单元18固定至从动构件14,从而随着从动构件14旋转。电磁铁单元18具有一对电磁铁18A和18B,共用磁芯80,然而每个电磁铁18A和18B还可具有其自己的磁芯。环形线圈81A和81B位于磁芯80中,且分别是电磁铁18A和18B的一部分。环形筒44A和相关的环形支撑部45A与电磁铁18A一致(in line with,成直线)并固定至磁芯80,从而随着磁芯80旋转。同样地,环形筒44B和相关的环形支撑部45B与电磁铁18B一致并固定至磁芯80,从而随着磁芯80旋转。磁芯80具有H形截面,基部构件82具有径向地伸出以夹在凸缘41A和41B之间的中央腹板83。顶部构件84A和84B完成磁芯80。顶部构件84A和84B位于中央腹板83的任一侧上,并且也夹在凸缘41A和41B之间。还可考虑其他布置方式,例如顶部构件84A和84B直接固定至中央腹板83,使用整体式磁芯作为所示实施例的替代方式,等等。如上所述,环形支撑部45A和45B固定至磁芯80,位于基部构件82和相应的顶部构件84A及84B之间。在所示实施例中,除了是电磁铁单元18的一部分以外,磁芯80也是从动构件14的输出壳体40的一部分。
当电流通过环形线圈81A时,在磁芯80的适当的一侧中产生磁场,且该磁场通过相互缠绕布置的筒24A和44A以及壳体40/磁芯80的剪切面,在其之间具有MR流体16。同样地,当电流通过环形线圈81B时,在磁芯80的适当的一侧中产生磁场,且该磁场通过相互缠绕布置的筒24B和44B以及壳体40/磁芯80的剪切面,在其之间具有MR流体16。每个线圈81A和81B都可能是冗余的:两个线圈合成一个以增加可靠性,如从图2H和2I观察到的。磁场可分别产生(例如,一次用电磁铁18A和18B中的一个)或同时产生,具有导致磁芯80旋转(从而导致从动构件14旋转)的相同的效果。因此,磁场增加MR流体16的表观粘度,以抓住(seize,粘着)筒24A及44A和/或筒24B及44B,导致将旋转运动从筒24A和/24B传递至筒44A和/或44B。筒24A和44A以及筒24B和44B的相互缠绕的布置允许增加总离合器接触表面和每单位体积MR流体16的离合器接触表面。然而,考虑使用单个筒24A和单个筒24B,以使用壳体40的剪切面(在所示实施例中,该剪切面是磁芯80的一部分)经由MR流体16传递力。实际上,任何适当的构造(通过该构造,驱动构件12的一个或多个剪切面通过填充有MR流体16的环形空间与从动构件14的剪切面隔开)都是合适的。
在操作中,根据一个代表性实施例,动力源(未示出)导致驱动构件12旋转。MR流体16通过用电磁铁单元18施加磁场,将至少一部分旋转能量(扭矩)传递至从动构件14,从而导致从动构件14旋转。电磁铁单元18使MR流体16经受磁场,如果磁场变化,则可改变MR流体16的表观粘度。进而,改变MR流体16的表观粘度可改变从驱动构件12传递至从动构件14的旋转能量的量。因此,在MR流体离合器设备10’的实例中,可通过控制电磁铁单元18产生的磁场的量,来调节传递至从动构件14的旋转能量的量。
在图2H中更详细地示出了磁场F的一个实例,该磁场示意性地示出为由两个电磁铁18A和18B产生。离合器设备10’由于线圈和流体腔室冗余而可具有高可靠性。实际上,多组筒(组24A/44A和组24B/44B)和填充有MR流体16的相关环形空间(也叫做流体腔室)的重复(duplication,重叠,复制)是冗余的,驱动构件12的运动可通过驱动电磁铁18A和18B的单侧而传递至从动构件14。例如,在如图2I所示的线圈故障的情况中,线圈产生的磁场可位于电磁铁的单侧上,如由电磁铁18B所产生的F’所示。此特点可允许离合器设备10保持起作用,尽管线圈发生故障。同样地,MR流体16在一侧的泄漏可能不会导致离合器设备10’发生故障,这是因为由于MR流体16的两个腔室的隔离而另一侧可保持起作用来传递运动。在图2A-2F的实例中,材料成分的磁路低横截面产生(low cross-secion generation)可使涡流减到最小并允许高动态响应。
图2A-2J所示的实施例对一个输出自由度(DOF)具有一个驱动度(DOA),MR流体离合器设备10’提供一个传递冗余度。该实施例示出了轴向DOA(即,驱动构件12从轴向连接的轴接收动力)至轴向输出DOF(输出轴与从动构件14连接)。然而,轴向输出DOF可容易转换成包含径向连接器的输出DOF,与图3所示的构造类似。
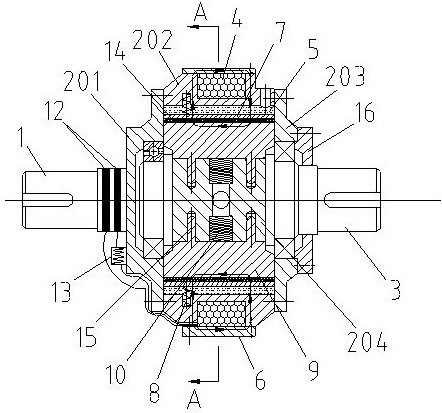
参考图3,MR流体离合器设备的另一实施例示出为10”,也叫做单MR流体驱动器。MR流体离合器设备10”与图2A-2F的MR流体离合器设备10’类似,由此,相同的部件将具有相同的参考数字。然而,MR流体离合器设备10”配置为从两个独立的源接收驱动输入,即,驱动构件12(和图2A-2F中一样)和驱动构件112。例如,驱动构件12可在第一方位上(例如顺时针)提供旋转输入,而驱动构件12可在相反方位上提供旋转输入。可替换地,驱动构件112可在相同方位上提供旋转输入以用于冗余动力输入,或者可以是提供一些形式的制动输入的定子。
在MR流体离合器设备10”中,从动构件114包括输出壳体140,其由轴承30支撑,以可围绕如通过驱动构件12和112连接的(journaled)轴线CL旋转。壳体具有第一环形半部40A和第二环形半部40B,凸缘或连接器141从半部40A和40B径向地伸出。通过连接器141提供从动构件114的输出,尽管其他布置方式也是可能的。因此,连接器141具有孔142,以使连接器141与其他设备、部件、连杆等连接。
因此,MR流体离合器设备10”配置为,使驱动构件12和112共有磁芯80,然而每个电磁铁18A和18B也可具有其自己的磁芯。在图3中,电磁铁18A产生磁场FA,其导致将旋转从驱动构件12传递至从动构件114。电磁铁18B产生磁场FB,其导致将旋转从驱动构件112传递至从动构件114。如果驱动构件12和112中的任一个是定子,那么相关的磁场F将阻止从动构件14的运动。在图3的又一实例中,磁场FA和FB可导致在从动构件14的不同方位上的旋转(顺时针的和逆时针的)。应指出,对操作电磁铁单元18的控制器进行编程,以避免以这样的方式操作电磁铁18A和18B,即,该方式使得在MR流体离合器设备10”上执行相冲突的驱动,并可提供安全特征以避免损坏MR流体离合器设备10”。
图3所示的实施例为对一个输出DOF(顺时针输出和逆时针输出,或者相同方位的冗余输出)具有两个DOA。可将定子认为是提供DOA,这是因为其提供制动动力。
MR流体离合器设备(例如之前的图中示出为10、10’和10”的那些)可包含在多种不同的系统中。例如,图4A和4B示出了根据一个实例实施例的受控滑动驱动(CSA)系统200。通过受控滑动,对可通过控制MR流体暴露于其的磁场实现的表观粘度的变化做出参考。尽管未示出,但是控制器与具有如这里描述的MR流体离合器设备的各种实施例的电磁铁连接,控制器响应于所需的传递任务而控制发送至电磁铁的电流。例如,控制器可基于CSA中的MR流体离合器设备的预期用途,而编程有多个操作模块。
图4A示出了CSA系统200的示意性顶视图,而图4B示出了CSA系统200的透视图。CSA系统200可提供两个控制输出,然而通过增加离合器设备可产生额外的控制输出。
在图4A和4B的实例中,CSA系统200的特征是四个旋转单元,这些旋转单元由马达201A和201B、直角变速箱202(或用于平行马达方向而不是所示横向方向的直变速箱)、单向离合器203、由任一马达或两个马达201A驱动的顺时针旋转的轴(CW轴)204A和由任一马达或两个马达201B驱动的逆时针旋转的轴(CCW轴)204B限定。在图4A和4B的实例中,马达201A和201B可使CW轴204A和CCW轴204B在相反的方向上以基本上恒定的速度旋转。在图4A-4B的实例实施例中,马达201是高速电动机,然而也可包括其他动力源,例如液压马达。在此实例实施例中,提供单向离合器203,以使阻塞(jammed)的马达201/变速箱202与CW轴204A和CCW轴204B分离。在阻塞的旋转单元的情况中,冗余的旋转单元(例如,两个马达201A中的另一个和变速箱202)可越过(overrun)单向离合器203。
CSA系统200还具有两对在图2A-2F中示出为10’的类型的MR流体离合器设备,第一对标记为205A和205B,第二对标记为206A和206B,并还具有两个输出连杆组件205C和206C,其分别耦接到205A/205B对和206A/206B对。每对MR流体离合器设备包括一个耦接到CW轴204A的MR流体离合器设备和一个耦接到CCW轴204B的MR流体离合器设备。因此,接收反向旋转输入的一对两个MR流体离合器设备可允许这对设备组合地控制其相应的输出连杆组件205C和206C的前后运动,该前后运动分别用X1和X2示出。输出连杆组件205C和206C是四杆机构,每个组件的特征是通过合适的旋转接头从两个输入杆208和209接收机械输入的结合杆207,输入杆208和209是离合器设备的从动构件。因此,输入杆208和209导致输出杆210响应地移动。输出杆210与接收由输出杆210传递的运动的部件、系统、组件等连接。输出杆210可与不同的部件连接,与相同的部件连接,等等。
在操作中,根据图4A和4B上的实施例,CW轴204A和CCW轴204B在相反的方向上旋转。MR流体离合器设备205A、205B、206A和206B均可通过改变MR流体离合器设备内的MR流体的表观粘度(例如,以图2A-2F中描述的改变电磁铁18A和/或18B的线圈中提供的电流的方式),在驱动轴(204A或204B)的旋转方位上将扭矩传递至其相关的输出连杆组件(205C或206C)。因此,205A/205B对和206A/206B对均能够在两个方向上对其输出连杆组件(205C或206C)产生力。例如,对MR流体离合器设备206A的电磁铁比对MR流体离合器设备206B的电磁铁提供大得多的量的电流,则可在其与输入杆209连接的位置处在顺时针方向上传递输出杆210处的扭矩。相反,对MR流体离合器设备206B的电磁铁比对MR流体离合器设备206A的电磁铁提供大得多的量的电流,则可在其与输入杆209连接的位置处在逆时针方向上传递输出杆210处的扭矩。以此方式,CSA系统200可通过改变提供给每个MR流体离合器设备的电流,来传递通过每个输出连杆组件提供的控制输出。
当用作对在相同数量级的扭矩下执行相同运动的传统液压驱动器的一种替代方式时,CSA系统200可导致减少维护操作并减小环境影响。此外,CSA系统200可通过提供冗余部件(例如,多个马达201、变速箱202、每个MR流体离合器设备内的部件冗余,例如电磁铁18A和18B的对)来满足可靠性标准。此外,这里描述的MR流体离合器设备具有相对少的部件、相对少的运动机件,并通过流体而不是固体接触面来传递扭矩。另外,CSA系统200可通过MR流体离合器设备并通过快速响应时间,利用惯性解耦提供比液压和电磁驱动器更高的动态响应。
图4A和4B所示的实施例提供四个DOA用于两个输出DOF,具有两个驱动冗余度,或提供两个DOA(当存在两个马达时)和两个输出DOF(两个顺时针/逆时针输出DOF)。甚至考虑,如果输出杆210互相连接,那么提供四个DOA用于一个输出DOF,该系统具有三个驱动冗余度。然而,可增加额外的MR流体离合器设备的组件对以用于附加的输出DOF。此外,考虑例如通过具有两个马达而不是四个而不提供两个驱动冗余度,其中每个马达具有两个轴端,以产生图4A-4B所示的布置。此外,可用成对马达201A的组合动力来同时驱动轴204A,并可用成对马达201B的组合动力来同时驱动轴204B。这可使得能够使用更小的马达。
作为对由使用多个轴的CSA系统200所教导的概念的替代方式,图5的CSA系统300考虑通过单个轴来提供双向控制。CSA系统300的特征是马达301、轴302和三对MR流体离合器设备303A/B、304A/B、305A/B。每对MR流体离合器设备与曲拐布置中的相应的输出连杆组件303C、304C、305C相关联。每对包括两个MR流体离合器设备,例如具有与图2A的MR流体离合器设备10类似的构造。每个MR流体离合器设备具有专用输出杆件306,每对303A/B、304A/B、305A/B在驱动轴302的纵向轴线上方具有一个杆件枢转点(见306A),在驱动轴302的纵向轴线下方具有另一杆件枢转点(见306B)。以此方式,由MR流体离合器设备303A在顺时针方向上传递的扭矩在连杆组件303C的输出枢转点307A处在顺时针方向上产生扭矩,而由MR流体离合器设备303B在顺时针方向上传递的扭矩在输出枢转点307A处在逆时针方向上产生扭矩。因此,通过单个轴302,CSA 300对其输出连杆组件303C、304C、305C产生往复输出运动。
图5所示的实施例通过六个传动度(六个离合器设备)是高度欠驱动的(underactuated),其中一个DOA用于三个输出DOF。图5的实施例可具有更多或更少的输出DOA和DOF。
根据又一说明本公开的MR流体离合器设备的可能用途的实施例,图6示出了离合器冗余旋转马达(CRRM)系统400。CRRM系统400通过连杆401提供机械输出。在此实例实施例中,CRRM系统400具有旋转单元402A和402B。旋转单元402A和402B具有相应的马达403A和403B、变速箱404A和404B,以及MR流体离合器设备405A和405B,MR流体离合器设备在操作上与图2A的MR流体离合器设备10类似,具有冗余的电磁铁。
在操作中,根据一个实施例,马达403A和/或403B可提供机械能量以使连杆401移动。在一个实例情况中,如果马达403A堵塞或以其他方式无法适当工作,那么离合器405A可与马达403A分离并允许马达403B驱动连杆401的运动。离合器405A通过提供给其MR流体的磁场的变化而分离,以产生表观粘度的减小。在图6的实例中,在CRRM系统400中设置两个马达,以提供冗余马达。考虑一起提供多个CRRM系统400,以对多输出系统提供冗余度。
图6所示的实施例示出,对于一个输出DOF具有两个DOA,具有一个驱动冗余度。这可包括一个这样的实施例,其中,马达403A和403B是双向的。或者,DOA可提供相反的方位。
参考图7,根据说明本公开的MR流体离合器设备的可能用途的又一实施例,示出了CRRM系统500。CRRM系统500的特征是两个主旋转单元501A和501B、共用旋转单元501C;以及连杆502A和502B。每个主旋转单元501A/501B可包括单个马达503A/503B、变速箱504A/504B,以及MR流体离合器设备505A/505B。共用旋转单元501C的特征也是单个马达503C、变速箱504C,但是MR流体离合器设备505C用于每个旋转单元501A和501B。MR流体离合器设备505C位于由单个马达503C经由变速箱504C驱动的驱动轴506上。连杆502A使旋转单元501A与共用旋转单元501C耦接,而连杆502B使旋转单元501B与共用旋转单元501C耦接。
在操作中,根据一个实施例,旋转单元501A可驱动连杆502A,旋转单元501B可驱动连杆502B。只要旋转单元501A和501B适当地操作,旋转单元501C可保持分离。然而,如果出现故障(例如,MR流体离合器设备505A或变速箱504A出现故障或马达503A出现故障),那么旋转单元501A的MR流体离合器设备505A可分离,并且,MR流体离合器设备505C可与共用旋转单元501C接合,以允许共用旋转单元501C驱动连杆502A。
以此方式,在一个主旋转单元出现故障的情况中,共用旋转单元501C可足以对所有两个主旋转单元501A和501B提供冗余度。考虑通过使多个旋转单元共用该共用旋转单元501C,将CRRM系统500的构造延伸至不止两个主旋转单元。
因此,在图7中,该构造示出了用于两个输出DOF的DOA,具有一个共用驱动冗余度。该驱动冗余度可通过增加旋转单元而在不止两个DOA之间共用。
磁流变流体离合器设备和控制系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0