










专利摘要
本实用新型公开了一种柔性微型机器人,该柔性微型机器人包括:上下贴合的主动柔性和被动柔性件,以及第一支撑件;主动柔性件用于在外力作用下伸长或缩短;被动柔性件用于在主动柔性件的带动下向底部弯曲或舒张;第一支撑件设置在被动柔性件底部的一侧,且与地面具有第 一预设夹角。本实用新型可以在提高微型机器人运动速度的同时,简化结构,降低成本。
权利要求
1.一种柔性微型机器人,其特征在于,包括:上下贴合的主动柔性件(1)和被动柔性件(2),以及第一支撑件(3);
所述主动柔性件(1)用于在外力作用下伸长或缩短;
所述被动柔性件(2)用于在所述主动柔性件(1)的带动下向底部弯曲或舒张;
所述第一支撑件(3)设置在所述被动柔性件(2)底部的一侧,且与地面具有第一预设夹角。
2.如权利要求1所述的柔性微型机器人,其特征在于,所述主动柔性件(1)采用压电材料,所述被动柔性件(2)采用非压电材料;
所述柔性微型机器人还包括:导电层(4),设置在所述主动柔性件(1)的上下相对面上;
所述主动柔性件(1)用于接入交流电,并在交流驱动电压的作用下伸长或缩短。
3.如权利要求2所述的柔性微型机器人,其特征在于,所述主动柔性件(1)的材质为聚偏氟乙烯。
4.如权利要求2所述的柔性微型机器人,其特征在于,所述被动柔性件(2)的材质为聚对苯二甲酸类塑料或聚酰亚胺。
5.如权利要求2所述的柔性微型机器人,其特征在于,还包括:第二支撑件,设置在所述被动柔性件(2)底部的另一侧,且与地面具有第二预设夹角。
6.如权利要求5所述的柔性微型机器人,其特征在于,所述第一预设夹角和所述第二预设夹角的度数为20°-80°。
7.如权利要求2所述的柔性微型机器人,其特征在于,所述导电层(4)的厚度为20nm-50nm。
8.如权利要求1所述的柔性微型机器人,其特征在于,所述主动柔性件(1)的厚度为15μm-30μm。
9.如权利要求1所述的柔性微型机器人,其特征在于,所述主动柔性件(1)和所述被动柔性件(2)的弯曲角度为30°-60°。
10.如权利要求1所述的柔性微型机器人,其特征在于,所述被动柔性件(2)和所述第一支撑件(3)以粘贴的方式相连接。
说明书
技术领域
本实用新型涉及机器人领域,尤其涉及一种柔性微型机器人。
背景技术
在极端环境探索,军事信息侦探,灾难搜寻和救援等场景下,由于地形原因,经常会使用到微型机器人参与现场工作,而对于毫米至厘米级尺寸大小的微型机器人来说,每增添一毫克的质量也会对机器人运动系统产生至关重要的影响。因此,为了提高现场作业效率,提供一种结构轻巧,运动速度快的微型机器人是十分必要的。
现有技术为了提高微型机器人的运动速度,一般会将微型机器人的结构设计的较为复杂,制作成本较高。
实用新型内容
本实用新型实施例提供一种柔性微型机器人,用以在提高微型机器人运动速度的同时,简化结构,降低成本,该柔性微型机器人包括:
上下贴合的主动柔性件和被动柔性件,以及第一支撑件;
所述主动柔性件用于在外力作用下伸长或缩短;
所述被动柔性件用于在所述主动柔性件的带动下向底部弯曲或舒张;
所述第一支撑件设置在所述被动柔性件底部的一侧,且与地面具有第一预设夹角。
可选的,所述主动柔性件采用压电材料,所述被动柔性件采用非压电材料;
所述柔性微型机器人还包括:导电层,设置在所述主动柔性件的上下相对面上;
所述主动柔性件用于接入交流电,并在交流驱动电压的作用下伸长或缩短。
可选的,所述主动柔性件的材质为聚偏氟乙烯。
可选的,所述被动柔性件的材质为聚对苯二甲酸类塑料或聚酰亚胺。
可选的,该柔性微型机器人还包括:第二支撑件,设置在所述被动柔性件底部的另一侧,且与地面具有第二预设夹角。
可选的,所述第一预设夹角和所述第二预设夹角的度数为20°-80°。
可选的,所述导电层的厚度为20nm-50nm。
可选的,所述主动柔性件的厚度为15μm-30μm。
可选的,所述主动柔性件和所述被动柔性件的弯曲角度为30°-60°。
可选的,所述被动柔性件和所述第一支撑件以粘贴的方式相连接。
本实用新型实施例中,通过设置主动柔性件和被动柔性件,并使主动柔性件在外力作用下伸长或缩短,被动柔性件在主动柔性件的带动下向底部弯曲或舒张,保证了在后续的作业中,可以通过外力控制主动柔性件伸长或缩短,并带动被动柔性件弯曲或舒张,进而在第一支撑件的支撑作用下在地面上不断运动。由于第一支撑件与地面具有第一预设夹角,因此,柔性微型机器人在地面上能够快速运动。可见,本实用新型实施例提供的柔性微型机器人结构简单,制作成本较低,且能够提高微型机器人的运动速度。
附图说明
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在附图中:
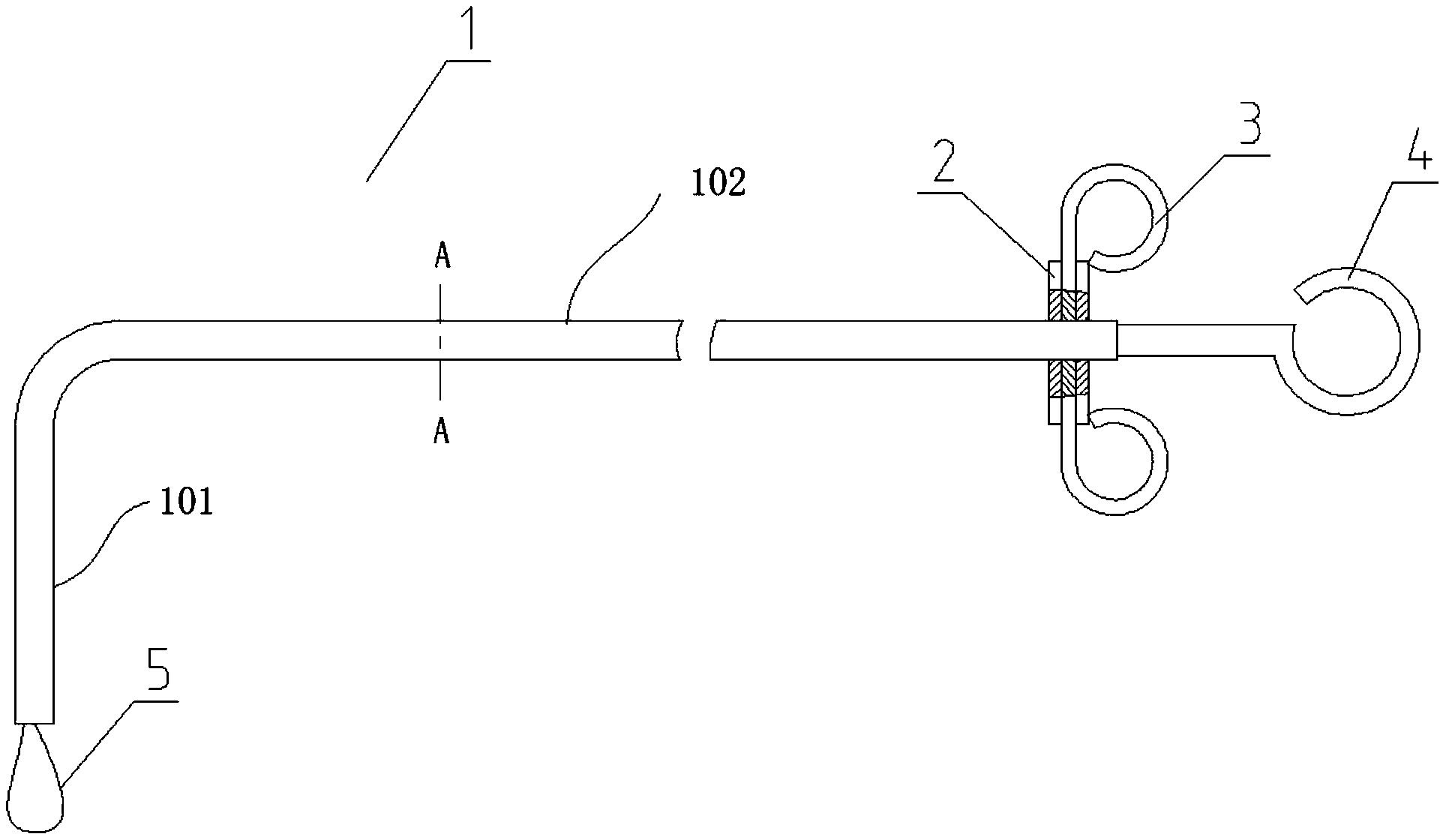
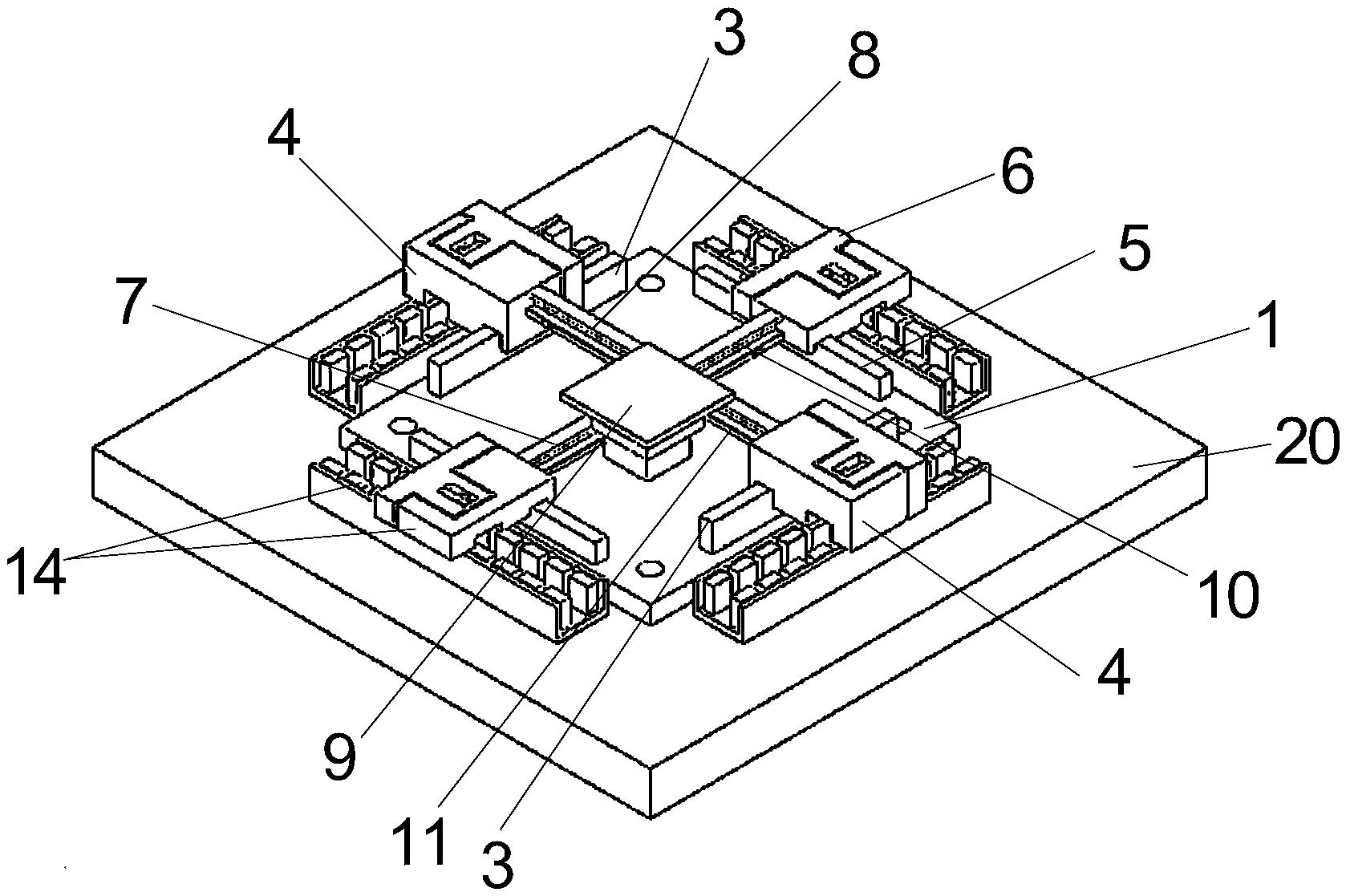
图1为本实用新型实施例中柔性微型机器人的结构示意图。
附图标号如下:
1 主动柔性件,
2 被动柔性件,
3 第一支撑件,
4 导电层。
具体实施方式
为使本实用新型实施例的目的、技术方案和优点更加清楚明白,下面结合附图对本实用新型实施例做进一步详细说明。在此,本实用新型的示意性实施例及其说明用于解释本实用新型,但并不作为对本实用新型的限定。
本实用新型实施例提供了一种柔性微型机器人,如附图1所示,该柔性微型机器人包括:上下贴合的主动柔性件1和被动柔性件2,以及第一支撑件3。主动柔性件1用于在外力作用下伸长或缩短。被动柔性件2用于在主动柔性件1的作用下向底部弯曲或舒张。第一支撑件3设置在被动柔性件2底部的一侧,且与地面具有第一预设夹角。
当需要控制柔性微型机器人在地面上运动时,利用外力(此处的外力包括:光能、电能或温度等) 使主动柔性件1发生伸长或缩短,进而带动被动柔性件2向底部弯曲或舒张,在此过程中,控制外力不断变化,使主动柔性件1不断重复进行伸长或缩短的动作,进而带动被动柔性件2不断向底部弯曲或舒张,在第一支撑件3的支撑作业下,即可实现柔性微型机器人在地面上的运动(因为存在第一支撑件3,所以在柔性微型机器人发生变形后,其前后摩擦力是不平衡的,这时该柔性微型机器人就会进行单向运动)。在作业过程中,根据实际需要,可以将柔性微型机器人作为载体(例如,在柔性微型机器人上安装一些传感器)。
本实用新型实施例提供的柔性微型机器人,通过设置主动柔性件1和被动柔性件2,并使主动柔性件1在外力作用下伸长或缩短,被动柔性件2在主动柔性件1的带动下向底部弯曲或舒张,保证了在后续的作业中,可以通过外力控制主动柔性件1伸长或缩短,并带动被动柔性件2弯曲或舒张,进而在第一支撑件3的支撑作用下在地面上不断运动。由于第一支撑件3与地面具有第一预设夹角,因此,柔性微型机器人在地面上能够快速运动。可见,本实用新型实施例提供的柔性微型机器人结构简单,制作成本较低,且能够提高微型机器人的运动速度。
其中,第一支撑件3的结构可以为多种,举例来说,其可以为杆体结构、柱状结构等。
为了保证柔性微型机器人的运动速度,可以将主动柔性件1和被动柔性件2的弯曲角度设置为30° -60°(如30°、45°、50°等)。
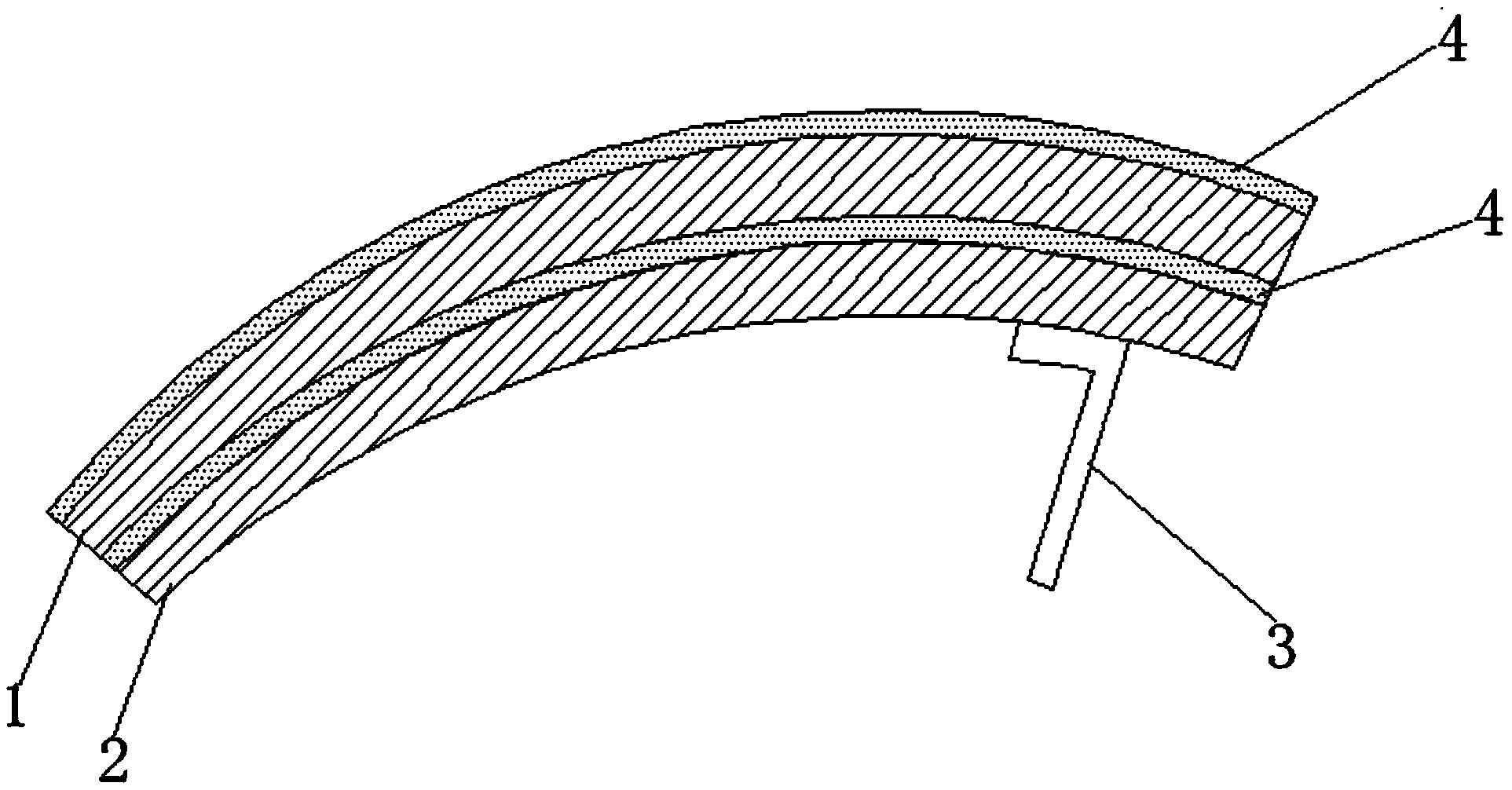
进一步地,主动柔性件1采用压电材料,被动柔性件2采用非压电材料。如附图1所示,柔性微型机器人还包括:导电层4。该导电层4设置在主动柔性件1的上下相对面上。
主动柔性件1用于接入交流电,并在交流驱动电压的作用下伸长或缩短。
基于压电材料可以因电场发生机械变形,而非压电材料不受电的影响,通过采用压电材料和非压电材料相互配合,保证了主动柔性件1可以通过交流电时刻发生变形,而被动柔性件2可以随主动柔性件 1的变化而变化。通过设置导电层4,相当于为主动柔性件1提供了一层保护能量吸收层,其具有较好的遮盖防护性能。其中,导电层4的厚度为20nm-50nm(如20nm、30nm、35nm等)。
具体地,如果将柔性微型机器人的一端固定住,将其看作是一个悬臂梁,在此可以推导出在静态的电压驱动下,悬臂梁的变形情况,推导公式如下:
上述(1)、(2)、(3)、(4)中,ε为主动柔性件1的应变;t1、t2、t3分别为主动柔性件1,导电层4 和被动柔性件2的厚度;E1、E2、E3分别为主动柔性件1,导电层4和被动柔性件2的杨氏模量;U 为驱动电压;d31为压电系数;c为一个中间轴量;tb为一个厚度量。
通过公式(1)、(2)、(3)、(4),我们可以计算出在某一电压下,悬臂梁自由端的位移量。在不同的电压驱动之下,悬臂梁自由端的位移量与驱动电压的关系,理论推导结果与实际实验结果相似。在交流驱动电压之下,机器人身体发生变形,由于前后摩擦力的不平衡产生单方向的运动。在交流信号的驱动下,驱动频率应接近机器人的共振频率。在此频率附近,机器人的身体变形的振幅最大,运动速度最快。
由于聚偏氟乙烯具有良好的耐化学性、加工性及抗疲劳和蠕变性,因此,主动柔性件1的材质可以为聚偏氟乙烯(Polyvinylidene fluoride,简称PVDF)。
基于聚对苯二甲酸类塑料和聚酰亚胺具有优良的耐磨耗摩擦性和尺寸稳定性及电绝缘性,被动柔性件2的材质可以为聚对苯二甲酸类塑料(Polyethyleneterephthalate,简称PET)或聚酰亚胺(Polyimide,简称PI)。
其中,主动柔性件1可以为薄膜结构,其厚度可以为15μm-30μm(15μm、20μm、25μm等)。
为了提高柔性微型机器人的运动速度,该柔性微型机器人还包括:第二支撑件。该第二支撑件设置在被动柔性件2底部的另一侧,且与地面具有第二预设夹角。其中,“另一侧”指的是与第一支撑件3 相对的一侧。
可以理解的是,在被动柔性件2底部的另一侧增加第二支撑件相当于增加一个动力件,在柔性微型机器人运动时,第一支撑件3和第二支撑件同时支撑地面,其运动过程与马类似,在运动过程中通过不断改变其运动速度可以实现奔腾的效果,即在运动过程中短暂离开地面,从而适应各种复杂的地理环境。
进一步地,为了保证柔性微型机器人的运动速度,第一预设夹角和第二预设夹角的度数可以为20°-80°(如30°、50°、70°等)。
在本实用新型实施例中,被动柔性件2和第一支撑件3可以以粘贴的方式相连接。
通过如此设置,即可以保证被动柔性件2和第一支撑件3连接紧固,同时便于安装。
其中,第一支撑件3的材质可以设置为与被动柔性件2相同,即第一支撑件3可以进行折叠,以便随时调成其与地面之间的夹角。
下面以主动柔性件1采用PVDF、被动柔性件2采用PET为例对本实用新型的柔性微型机器人的制作过程进行说明:
首先,制作出镂空方形图案的长3cm、宽1.5cm的掩模板,用于作为在柔性压电薄膜PVDF上蒸镀金属的掩模。在掩模板下,通过蒸镀或者溅射的方式在厚度为20μm的PVDF两面分别蒸镀20nm厚度的金。在双面镀金之后,用激光切割机或者剪纸机将蒸镀好的长为3cm和宽为1.5cm的方形图案切割下来。用同样的切割机器将不具备压电性能的PET单面带胶的薄膜切割出相同尺寸的方形图案。在 PVDF的两个表面分别用导线固定好,用PET带胶的一面与双满PVDF薄膜黏贴,形成机器人的骨架。将平面的骨架放在用3D打印的曲面上,通过热压的方式将平面骨架狗造成拱形的三维曲面,曲率为45 度。用PET折叠成为一个角度,黏贴到拱形三维曲面的一端组成腿部,腿部与地面夹角为70度。将 PVDF引出的两根导线分别接入驱动电路板的两个端子。驱动电路板输出可调的交流信号。制作好后的柔性微型机器人的质量小于0.1g。
作业时,PVDF的上下两个表面分别外接引线,连接到外界电源的正负极,正极提供交流电压,峰峰值为50V到200V区间,负极可接地。
综上,本实用新型利用简单的制作工艺和结构设计,实现了柔性微型机器人的快速运动;并且经过大压力和变形作用之后,机器人仍然能够保持连续运动的能力,表明了该柔性微型机器人具有较好的稳定性和鲁棒性。
以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限定本实用新型的保护范围,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
一种柔性微型机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0