









专利摘要
电气驱动系统包括电机(103)、连接到电机的定子相绕组的端子(107‑109)的第一转换器级(106),以及连接到定子相绕组的中间点(114‑116)的第二转换器级(113)。控制设备(101)确定第一分量电流和第二分量电流,使得当相绕组的端子和中间点之间的部分承载第一分量电流和第二分量电流两者而相绕组的其他部分承载第一分量电流时,根据电机控制生成转矩,并且根据悬浮控制,将磁悬浮力导向电机的转子(105)。基于第一分量电流和第二分量电流来确定第一转换器级的基准电流,并且基于第二分量电流来确定第二转换器级的基准电流。
权利要求
1.一种控制电气驱动的控制设备(101),所述电气驱动包括:
-包括定子和转子的电机,
-连接到所述定子的相绕组的端子的第一转换器级,以及
-连接到所述定子的所述相绕组的中间点的第二转换器级,所述相绕组中的每一个包括所考虑的相绕组的在所述端子和所述中间点之间的第一部分,以及所述相绕组中的每一个除了所考虑的相绕组的所述第一部分之外包括第二部分,
其特征在于,所述控制设备包括计算系统(102),所述计算系统(102)被配置成:
-确定第一分量电流(i1Cu、i1Cv、i1Cw)和第二分量电流(i2Cu、i2Cv、i2Cw),使得当所述相绕组的所述第一部分承载所述第一分量电流和所述第二分量电流两者并且所述相绕组的所述第二部分至少承载所述第一分量电流时,根据电机控制生成转矩,并且根据悬浮控制将磁悬浮力引导到所述转子,
-基于所述第一分量电流和所述第二分量电流,确定所述第一转换器级的基准电流(iref1u、iref1v、iref1w),以及
-至少基于所述第二分量电流,确定所述第二转换器级的基准电流(iref2u、iref2v、iref2w)。
2.根据权利要求1所述的控制设备,其中,所述计算系统被配置成基于所述电机的计算模型,确定所述第一分量电流和所述第二分量电流,所述计算模型对所述电机进行建模,使得所述相绕组的磁链取决于永磁转子的旋转位置,并且假定电感很小以至于假定所述相绕组的所述磁链基本上与所述第一分量电流和所述第二分量电流无关。
3.根据权利要求1所述的控制设备,其中,所述计算系统被配置成基于所述电机的线性化的计算模型来确定要对所述第一分量电流进行的改变以及要对所述第二分量电流进行的改变,使得在每一线性化点处,这些改变的结果近似为零。
4.根据权利要求1至3中任一项所述的控制设备,其中,所述计算系统被配置成确定第三分量电流(i3Cu、i3Cv、i3Cw)使得当所述相绕组的第一部分承载所述第一分量电流和所述第二分量电流两者并且所述相绕组的第二部分承载所述第一分量电流和所述第三分量电流两者时,根据所述电机控制生成所述转矩,并且根据所述悬浮控制将所述磁悬浮力引导到所述转子,并且被配置成基于所述第二分量电流和所述第三分量电流,确定所述第二转换器级的基准电流。
5.一种电气驱动,包括:
-包括定子(104)和转子(105)的电机(103),
-连接到所述定子的相绕组(110-112)的端子(107-109)的第一转换器级(106),
-连接到所述定子的所述相绕组的中间点(114-116)的第二转换器级(113),所述相绕组中的每一个包括所考虑的相绕组的在所述端子和所述中间点之间的第一部分(110a、111a、112a),并且所述相绕组中的每一个除了所考虑的相绕组的所述第一部分之外包括第二部分(110b、111b、112b),以及
-根据权利要求1-4中的任一项所述的控制设备(101),用于确定所述第一转换器级的基准电流(iref1u、iref1v、iref1w)和用于确定所述第二转换器级的基准电流(iref2u、iref2v、iref2w)。
6.根据权利要求5所述的电气驱动,其中,所述电机是永磁电机,所述电机的所述转子包括永磁材料(117)。
7.根据权利要求5或6所述的电气驱动,其中,所述电气驱动包括下述中的至少一个,以向所述电机控制和所述悬浮控制提供输入数据:用于测量电流的装置、用于测量磁通量的装置、用于测量温度的装置、用于测量转子的旋转位置的装置、用于测量所述转子在垂直于所述转子的旋转轴的方向中的位置的装置。
8.根据权利要求8所述的电气驱动,其中,所述控制设备被配置成基于测量的量来估计下述中的至少一个,以向所述电机控制和所述悬浮控制提供输入数据:电流、磁通量、所述转子的所述旋转位置、所述转子的在垂直于所述转子的旋转轴的所述方向中的所述位置。
9.一种控制电气驱动的方法,所述电气驱动包括:
-包括定子和转子的电机,
-连接到所述定子的相绕组的端子的第一转换器级,以及
-连接到所述定子的所述相绕组的中间点的第二转换器级,所述相绕组中的每一个包括所考虑的相绕组的在所述端子和所述中间点之间的第一部分,以及所述相绕组中的每一个除了所考虑的相绕组的所述第一部分之外包括第二部分,
其特征在于,所述方法包括:
-确定(201)第一分量电流和第二分量电流,使得当所述相绕组的所述第一部分承载所述第一分量电流和所述第二分量电流两者、并且所述相绕组的所述第二部分至少承载所述第一分量电流时,根据电机控制生成转矩,并且根据悬浮控制将磁悬浮力引导到所述转子,
-基于所述第一分量电流和所述第二分量电流,确定(202)所述第一转换器级的基准电流,以及
-至少基于所述第二分量电流,确定(203)所述第二转换器级的基准电流。
10.根据权利要求9所述的方法,其中,所述方法包括基于所述电机的计算模型,确定所述第一分量电流和所述第二分量电流,所述计算模型对所述电机进行建模,使得所述相绕组的磁链取决于永磁转子的旋转位置,并且假定电感很小以至于假定所述相绕组的所述磁链基本上与所述第一分量电流和所述第二分量电流无关。
11.根据权利要求9所述的方法,其中,所述方法包括基于所述电机的线性化的计算模型来确定要对所述第一分量电流进行的改变以及要对所述第二分量电流进行的改变,使得在每一线性化点处,这些改变的结果近似为零。
12.根据权利要求9至11中任一项所述的方法,其中,所述方法包括:确定第三分量电流,使得当所述相绕组的所述第一部分承载所述第一分量电流和所述第二分量电流两者并且所述相绕组的所述第二部分承载所述第一分量电流和所述第三分量电流两者时,根据所述电机控制生成所述转矩,并且根据所述悬浮控制将所述磁悬浮力引导到所述转子;并且基于所述第二分量电流和所述第三分量电流,确定所述第二转换器级的基准电流。
13.一种控制电气驱动的计算机程序,所述电气驱动包括:
-包括定子和转子的电机,
-连接到所述定子的相绕组的端子的第一转换器级,以及
-连接到所述定子的所述相绕组的中间点的第二转换器级,所述相绕组中的每一个包括所考虑的相绕组的在所述端子和所述中间点之间的第一部分,以及所述相绕组中的每一个除了所考虑的相绕组的第一部分之外包括第二部分,
其特征在于,所述计算机程序包括计算机可执行指令,所述计算机可执行指令控制所述电气驱动的可编程处理系统以:
-确定第一分量电流和第二分量电流,使得当所述相绕组的所述第一部分承载所述第一分量电流和所述第二分量电流两者、并且所述相绕组的所述第二部分至少承载所述第一分量电流时,根据电机控制生成转矩,并且根据悬浮控制将磁悬浮力引导到所述转子,
-基于所述第一分量电流和所述第二分量电流,确定所述第一转换器级的基准电流,以及
-至少基于所述第二分量电流,确定所述第二转换器级的基准电流。
14.一种控制电气驱动的计算机程序产品,所述计算机程序产品包括编码有根据权利要求13所述的计算机程序的非易失性计算机可读介质。
说明书
技术领域
本公开通常涉及电气驱动(electrical drive)中的磁悬浮和转矩生成的控制。更具体地说,本公开涉及一种控制设备和控制电气驱动的方法。此外,本公开涉及用于控制电气驱动的计算机程序。
背景技术
磁悬浮系统,诸如,主动磁轴承“AMB”在本领域中是公知的。磁悬浮系统通常用于支撑旋转或振荡物体。将磁悬浮用在旋转机中导致例如:当与具有机械轴承的传统旋转机相比时,减少摩擦、无油操作、较低的维护成本和/或较高的可靠性。与除了用于生成转矩的电机外还包括单独的AMB致动器的传统的AMB转子系统相比,将转矩生成和磁悬浮的功能结合到一个电机中导致更短的转子和更经济的控制和驱动电子设备。提供组合转矩生成和磁悬浮功能的电机通常被称为无轴承电机,尽管上述类型的电机通常具有用于在磁悬浮故障的情况下支撑转子的机械安全轴承。
出版物Chiba、A.等、A Novel Middle-Point-Current-Injection-Type Bearingless PM Synchronous Motor for Vibration Suppression、电气和电子工程师协会“IEEE”,Transactions on Industry Applications、Vol.47、No.4、2011描述了一种中点电流注入型无轴承永磁同步电机的定子绕组结构。电动机不具有用于径向磁力生成的附加绕组,但每一定子相绕组具有到定子相绕组的中间点的连接,从而能够将力生成电流提供给所述的定子相绕组。第一转换器级连接到定子相绕组的端子,以及第二转换器级连接到定子相绕组的中间点。第一转换器级被配置成向定子相绕组的端子提供转矩生成电流,以及第二转换器级被配置成向定子相绕组的中间点提供力生成电流。当电流提供给定子相绕组的中间点时,在中间点的不同侧上的定子相绕组的不同部分中流动的电流之间存在不平衡,因此使径向磁力引导到转子。Chiba等人描述的无轴承永磁同步电动机只需要一个额外的三相转换器,因此,该系统可以是成本有效的。然而,仍然需要开发用于控制上述类型的无轴承电机的控制技术。例如,以稳健和成本高效的方式设置上述第一转换器级和第二转换器级的协作具有挑战性。例如,在由Chiba等人描述的无轴承永磁体同步电机中,仅定子相绕组的上述中间点被用于提供用于径向磁力产生的电流。这导致对定子相绕组的不同部分的不同电流需求以及在力产生和通量多快,由此改变力的限制。
发明内容
下文提出简化的概述以提供各种发明实施例的一些方面的基本了解。本发明内容部分并非本发明的详尽综述。其既非旨在识别本发明的关键或主要元素,亦非限定本发明的范围。下文的发明内容部分仅以简化形式呈现本发明的某些构思,作为本发明的例示实施例的更详细描述的引言。
根据本发明,提供控制电气驱动的新控制设备,控制设备包括:
-包括定子和转子的电机,
-连接到定子的相绕组的端子的第一转换器级,以及
-连接到定子的相绕组的中间点的第二转换器级,相绕组中的每一个包括所考虑的相绕组的端子和中间点之间的第一部分,以及相绕组中的每一个除了所考虑的相绕组的第一部分之外包括第二部分。
根据本发明的控制设备包括计算系统,该计算系统被配置成:
-确定第一分量电流和第二分量电流,使得当相绕组的第一部分承载第一分量电流和第二分量电流两者、并且相绕组的第二部分至少承载第一分量电流时,根据电机控制生成转矩,并且根据悬浮控制,将磁悬浮力引导到转子,
-基于第一分量电流和第二分量电流,确定第一转换器级的基准电流,以及
-至少基于第二分量电流,确定第二转换器级的基准电流。
上述第一转换器级和第二转换器级的操作经由第一转换器级的基准电流和第二转换器级的基准电流互连,由此,不需要用于设置上述第一转换器级和第二转换器级的协作的复杂控制系统。上述电机控制可以包括例如旋转速度传感器或估计器、旋转位置传感器或估计器、电压传感器或估计器,和/或电流传感器或估计器,以及提供转矩基准的速度控制器。上述悬浮控制可以包括例如用于测量或估计转子在相互垂直的径向方向中的位置的位置传感器或估计器以及用于产生用于将转子驱动到其基准位置的相互垂直的力基准的控制器。用于估计转子在相互垂直的径向中的位置的位置估计器可以基于例如旋转位置传感器或估计器以及电流、电压和/或通量传感器。每个电流和/或通量传感器可以位于主电路和/或磁路中或者在主电路和/或磁路外的其他地方。位于除主电路和/或磁路外的其他地方的电流和/或通量传感器可以包括例如探测线圈(search coil)和/或杂散通量传感器(stray flux sensor)。此外,测量的温度可以用于位置的估计中。计算系统可以被配置成基于电机的计算模型和上述转矩和力基准来确定上述第一分量电流和第二分量电流。
根据本发明,还提供了一种控制上述类型的电气驱动的新方法。根据本发明的方法包括:
-确定第一分量电流和第二分量电流,使得当相绕组的第一部分承载第一分量电流和第二分量电流两者、并且相绕组的第二部分至少承载第一分量电流时,根据电机控制生成转矩,并且根据悬浮控制,将磁悬浮力引导到转子,
-基于第一分量电流和第二分量电流,确定第一转换器级的基准电流,以及
-至少基于第二分量电流,确定第二转换器级的基准电流。
根据本发明,还提供一种新的电气驱动,包括:
-包括定子和转子的电机,
-连接到定子的相绕组的端子的第一转换器级,
-连接到定子的相绕组的中间点的第二转换器级,以及
-根据本发明的控制设备,用于确定第一转换器级的基准电流和第二转换器级的基准电流。
根据本发明,还提供一种控制上述类型的电气驱动的新的计算机程序。根据本发明的计算机程序包括计算机可执行指令,计算机可执行指令控制电气驱动的可编程处理系统以:
-确定第一分量电流和第二分量电流,使得当相绕组的第一部分承载第一分量电流和第二分量电流两者、并且相绕组的第二部分至少承载第一分量电流时,根据电机控制生成转矩,并且根据悬浮控制,将磁悬浮力引导到转子,
-基于第一分量电流和第二分量电流,确定第一转换器级的基准电流,以及
-至少基于第二分量电流,确定第二转换器级的基准电流。
根据本发明,还提供一种新型的计算机程序产品。计算机程序产品包括编码有根据本发明的计算机程序的非易失性计算机可读介质,例如光盘。
在所附的从属权利要求中描述了多个本发明的示例性且非限制性实施例。
当结合附图阅读时,通过下面对示例性且非限制性具体实施例的描述,会更好地理解本发明关于构造和操作方法的各种示例性且非限制性实施例以及其他目的和优点。
在本文中,动词“包括”被用作不排除也不一定必须存在未述特征的开放式限定。在从属权利要求中的特征可自由组合,除非另作说明。另外,会理解的是,在本文通篇使用的“一(a/an)”即单数形式并非排除复数。
附图说明
下文从示例意义上并且参照附图更加详细地阐述本发明的示例性且非限制性实施例以及它们的优点,在附图中:
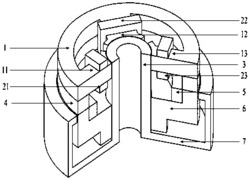
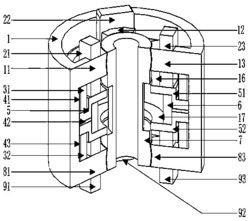
图1a和图1b示出包括根据本发明的示例性且非限制性实施例的控制设备的电气驱动,以及
图2示出根据本发明的示例性且非限制性实施例的用于控制电气驱动的方法的流程图。
具体实施方式
在下文给出的描述中提供的具体示例不应该被解释为限制所附权利要求的范围和/或适用性。此外,应该理解的是,在下文给出的描述中提供的示例的列表和示例组不是穷举,除非另有明确规定。
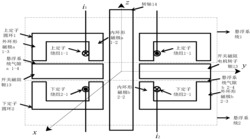
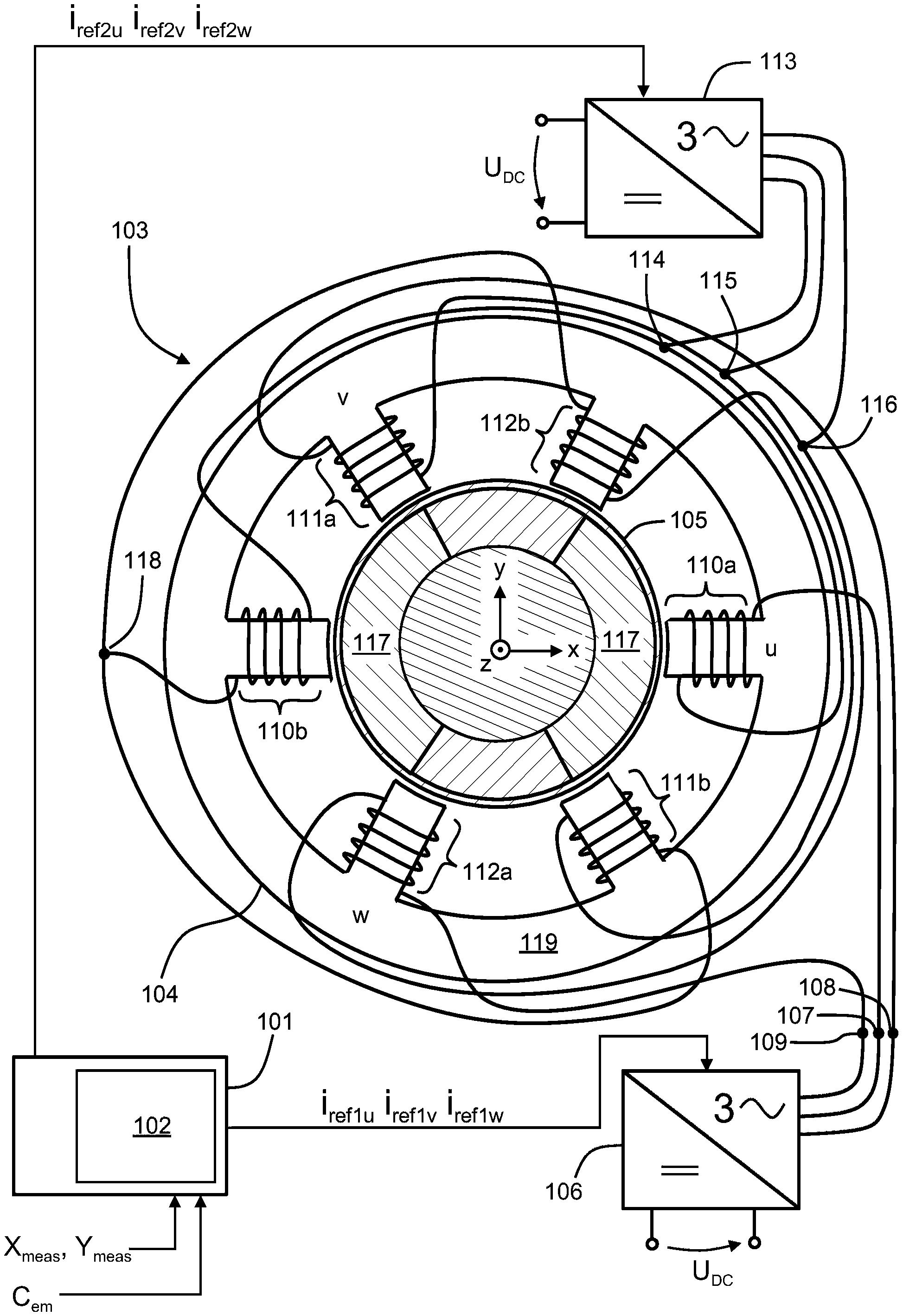
图1a示出包括根据本发明的示例性且非限制性实施例的控制设备101的电气驱动的示意图。电气驱动包括电机103,电机103包括定子104和转子105。电机103可以操作为电动机或发电机。在该示例性情况下,电机103是永磁电机,其转子105包括永磁体材料117。电机103的定子包括铁磁芯结构119和定子绕组。值得注意的是,图1a示出了示意图,因此,从电机103的操作的角度看,铁磁芯结构119的齿、槽和轭部分的形状和相互尺寸不一定是最佳的。在该例子中,定子绕组是三相绕组,其中,极对数为1,即p=1。图1b示出了定子绕组的电路图。定子绕组包括连接到星形点118的三相绕组110、111和112。每一相绕组包括在相绕组的端子和相绕组的中间点之间的第一部分。此外,每一相绕组除了第一部分之外还包括第二部分。每一相绕组的第二部分位于星形点118和所考虑的相绕组的中间点之间。如图1b所示,相绕组110包括第一部分110a和第二部分110b,相绕组111包括第一部分111a和第二部分111b,以及相绕组112包括第一部分112a和第二部分112b。在图1a和1b中,相绕组的端子用附图数字107、108和109表示,相绕组的中间点用附图数字114、115和116表示。
电气驱动包括连接到相绕组110-112的端子107-109的第一转换器级106。电气驱动包括连接到相绕组110-112的中间点114-116的第二转换器级113。第一转换器级106可以是例如将直流电压UDC转换成可控三相交流电压的逆变器级。原则上,第一转换器级106也可以是将例如三相输入交流电压转换成可控三相输出交流电压的直接转换器。相应地,第二转换器级113可以是例如将直流电压UDC转换成可控三相交流电压的逆变器级。原则上,第二转换器级106也可以是将例如三相输入交流电压转换成可控三相输出交流电压的直接转换器。
电气驱动包括控制设备101,用于确定第一转换器级106的基准电流iref1u、iref1v和iref1w,并且确定第二转换器级113的基准电流iref2u、iref2v和iref2w。第一转换器级106可以被配置成应用例如两点滞后控制用于具有足够精度地将第一转换器级106的输出电流控制到基准电流iref1u、iref1v和iref1w。相应地,第二转换器级113可以被配置成应用两点滞后控制用于具有足够精度地将第二转换器级113的输出电流控制到基准电流iref2u、iref2v和iref2w。控制设备101包括计算系统102,该计算系统102被配置成确定第一分量电流i1Cu、i1Cv和i1Cw以及第二分量电流i2Cu、i2Cv和i2Cw,使得当相绕组的第一部分110a、111a和112a承载第一分量电流和第二分量电流两者以及相绕组的第二部分110b、111b和112b至少承载第一分量电流时,根据电机控制生成转矩,并且根据悬浮控制,将磁悬浮力引导至转子105。当电流被提供到相绕组的中间点时,在相绕组的第一部分和第二部分中流动的电流之间存在不平衡,由此使径向磁力引导到转子105。计算系统102被配置成基于第一分量电流和第二分量电流,确定第一转换器级106的基准电流iref1u、iref1v和iref1w,使得iref1u=i1Cu–i2Cu、iref1v=i1Cv–i2Cv、和iref1w=i1Cw–i2Cw。计算系统102被配置成至少基于第二分量电流,确定第二转换器级113的基准电流iref2u、iref2v和iref2w,例如使得iref2u=i2Cu、iref2v=i2Cv和iref1w=i2Cw。
上述电机控制器可以包括例如提供转矩基准的转速和/或旋转位置传感器和速度控制器。在图1a和1b中未示出转速和/或旋转位置传感器。在图1a和1b中,量Cem表示与电机控制相关的控制量。量Cem可以是例如测量的或估计的转速和/或旋转位置,计算系统102基于此形成转矩基准。旋转速度和/或旋转位置可以基于磁通量、电压和/或电流来估计。此外,测量的温度可以用在估计中。电机103也可以通过外部给定的转矩基准来驱动,在这种情况下,量Cem可以是转矩基准。上述悬浮控制可以包括例如用于测量或估计转子105在相互垂直的径向方向中的位置的位置传感器或估计器,以及用于产生用于将转子驱动到其基准位置的相互垂直的力基准的控制器。位置传感器或估计器在图1a和1b中未示出。可以基于磁通量、旋转位置、电压和/或电流来估计转子105在相互垂直的径向方向中的位置。此外,所测量的温度可以用在估计中。相互垂直的径向方向可以是例如图1a中所示的坐标系的x方向和y方向。在图1a和1b中,量Xmeas和Ymeas与悬浮控制有关,并且表示转子105在x和y方向中的测量位置。计算系统102被配置成基于量Xmeas和Ymeas以及转子的基准位置来产生相互垂直的力基准。
计算系统102可以被配置成基于电机103的计算模型并且基于上述转矩基准和相互垂直的力基准,确定第一分量电流i1Cu、i1Cv和i1Cw以及第二分量电流i2Cu、i2Cv和i2Cw。第一分量电流和第二分量电流与转矩基准之间的关系可以用下述方程式近似:
Tref=TC1(ΨPMcos(θ)(i1Cu–(i1Cv+i1Cw)/2)–ΨPMsin(θ)√3(i1Cv–i1Cw)/2)–TC2(ΨPMcos(θ)(i2Cu–(i2Cv+i2Cw)/2)–ΨPMsin(θ)√3(i2Cv–i2Cw)/2)
(1)
其中Tref是转矩基准,ΨPM是由相绕组110-112的转子的永磁体产生的磁链(magnetic flux linkage)的基本分量的振幅,θ是相对于正x方向转子的直轴的旋转角,以及TC1和TC2是常系数。借助于系数TC1和TC2,考虑第二分量电流i2Cu、i2Cv和i2Cw仅在各自的相绕组的一部分中流动的事实。
第二分量电流i2Cu、i2Cv和i2Cw表示由相绕组的第一部分和第二部分承载的电流之间的不平衡。这些不平衡导致磁力被引导到转子105。第二分量电流之间的关系即上述不平衡以及相互垂直的力基准可用下述方程式近似:
Fxref=
FC1(ΨPMcos(θ)i2Cu–ΨPMcos(θ-2π/3)i2Cv/2-ΨPMcos(θ-4π/3)i2Cw/2) (2)
Fyref=FC1√3(ΨPMcos(θ-2π/3)i2Cv–ΨPMcos(θ-4π/3)i2Cw)/2 (3)
其中,Fxref是x方向力基准,Fyref是y方向力基准,FC1是常系数。
此外,对第一分量电流i1Cu、i1Cv和i1Cw以及第二分量电流i2Cu、i2Cv和i2Cw,存在下述方程式:
i1Cu+i1Cv+i1Cw=0,和 (4)
i2Cu+i2Cv+i2Cw=0。 (5)
第二分量电流i2Cu、i2Cv和i2Cw可以从上文提到的三个方程式(2)、
(3)和(5)中求解。之后,求解的第二分量电流i2Cu、i2Cv和i2Cw可以被代入方程式(1)中。方程式(1)和(5)不足以唯一地求解第一分量电流i1Cu、i1Cv和i1Cw,因为还未定义产生转矩生成的功率因数 功率因数可以被定义为所需的值,例如,1,在这种情况下,定义第一分量电流i1Cu、i1Cv和i1Cw的空间矢量与转子的直轴之间的角度。这是指定义空间矢量的x分量即i1Cu–(i1Cv+i1Cw)/2和空间矢量的y分量即√3(i1Cv–i1Cw)/2之间的比。这提供了为了唯一求解第一分量电流i1Cu、i1Cv和i1Cw的除了方程式(1)和(5)以外所需的第三方程式。
在根据本发明的示例性和非限制性实施例的电气驱动中,计算系统102被配置成确定第三分量电流i3Cu、i3Cv和i3Cw,使得当相绕组的第一部分承载第一分量电流和第二分量电流两者并且相绕组的第二部分承载第一分量电流和第三分量电流两者时,根据电机控制生成转矩,并且根据悬浮控制使磁悬浮力引导到转子。在该示例性情况下,计算系统102可以被配置成基于第一分量电流和第二分量电流确定第一转换器级106的基准电流iref1u、iref1v和iref1w,使得iref1u=i1Cu–i2Cu、iref1v=i1Cv–i2Cv以及iref1w=i1Cw–i2Cw,并且基于第二分量电流和第三分量电流确定第二转换器级113的基准电流iref2u、iref2v和iref2w,使得iref2u=i2Cu+i3Cu、iref2v=i2Cv+i3Cv和iref2w=i2Cw+i3Cw。
在该示例性情况下,对应于上述方程式(1)的方程式是:
Tref=TC1(ΨPMcos(θ)(i1Cu–(i1Cv+i1Cw)/2)–ΨPMsin(θ)√3(i1Cv–i1Cw)/2)–TC2(ΨPMcos(θ)(i2Cu–(i2Cv+i2Cw)/2)–ΨPMsin(θ)√3(i2Cv–i2Cw)/2)+TC3(ΨPMcos(θ)(i3Cu–(i3Cv+i3Cw)/2)–ΨPMsin(θ)√3(i3Cv–i3Cw)/2)
其中,TC3是常系数。
例如由相绕组110的第一部分110a承载的电流和由相绕组110的第二部分110b承载的电流之间的不平衡是(i1Cu–i2Cu)–(i1Cu+i3Cu)=–(i2Cu+i3Cu)。因此,在该示例性情况下,对应于上述方程式(2)和(3)的方程式是:
Fxref=FC2[ΨPMcos(θ)(i2Cu+i3Cu)–ΨPMcos(θ-2π/3)(i2Cv+iCRv)/2-ΨPMcos(θ-4π/3)(i2Cw+i3Cw)/2]
Fyref=FC2√3[ΨPMcos(θ-2π/3)(i2Cv+i3Cv)–ΨPMcos(θ-4π/3)(i2Cw+i3Cw)]/2
其中,FC2是常系数。从上文给出的方程式可以看出,第三分量电流i3Cu、i3Cv和i3Cw提供了较大的自由度来确定如何在第一转换器级106和第二转换器级113之间共享转矩生成。
在上述示例性情况下,假设相绕组110-112的磁链基本上与相绕组110-112的电流无关,即相绕组110-112的电感很小。结合图1a所示类型的永磁电机,该假设相当有效,这是因为对由相绕组的电流表示的磁动势“mmf”,有效气隙长。在具有足够精度而该假设无效的情况下,计算系统102可以被配置成使用电机的线性化的计算模型。计算模型在每个操作点处被线性化,并且对于主要的操作点,计算系统102被配置成根据所期望的转矩改变ΔTref以及所期望的x和y方向磁力的改变ΔFxref和ΔFyref,确定要对第一分量电流做出的改变Δi1Cu、Δi1Cv和Δi1Cw,要对第二分量电流做出的改变Δi2Cu、Δi2Cv和Δi2Cw以及要对第三分量电流做出的可能改变Δi3Cu、Δi3Cv、和Δi3Cw。在线性化的计算模型中,假设电流的上述改变的结果足够小,以致这些结果可以近似为零。
图1a和1b所示的控制设备101可以用一个或多个模拟电路和/或一个或多个数字处理器电路来实现,其中的每一个都可以是具有适当软件的可编程处理器电路、专用硬件处理器,诸如专用集成电路“ASIC”,或可配置硬件处理器,诸如现场可编程门阵列“FPGA”。
图2示出了根据本发明的示例性和非限制性实施例的用于控制电气驱动的方法的流程图,所述电气驱动包括:
-包括定子和转子的电机,
-连接到定子的相绕组的端子的第一转换器级,
-连接到定子的相绕组的中间点的第二转换器级,每一相绕组包括所考虑的相绕组的端子和中间点之间的第一部分,并且每一相绕组除了所考虑的相绕组的第一部分之外还包括第二部分。
该方法包括以下动作:
-动作201:确定第一分量电流i1Cu、i1Cv、i1Cw和第二分量电流i2Cu、i2Cv、i2Cw,使得当相绕组的第一部分承载第一分量电流和第二分量电流两者并且相绕组的第二部分至少承载第一分量电流时,根据电机控制生成转矩,并且根据悬浮控制,将磁悬浮力引导到转子,
-动作202:基于第一分量电流和第二分量电流,确定第一转换器级的基准电流iref1u、iref1v和iref1w,以及
-动作203:至少基于第二分量电流,确定第二转换器级的基准电流iref2u、iref2v和iref2w。
根据本发明的示例性和非限制性实施例的方法包括基于电机的计算模型确定第一分量电流和第二分量电流,所述计算模型对所述电机进行建模,使得相绕组的磁链取决于永磁转子的旋转位置,并且假定电感很小以至于假定相绕组的磁链基本上与第一分量电流和第二分量电流无关。
根据本发明的示例性和非限制性实施例的方法包括基于电机的线性化的计算模型来确定要对第一分量电流做出的改变以及要对第二分量电流做出的改变,使得在每个线性化点处,这些改变的结果近似为零。
根据本发明的示例性和非限制性实施例的方法包括确定第三分量电流,使得当相绕组的第一部分承载第一分量电流和第二分量电流并且相绕组的第二分量电流承载第一分量电流和第三分量电流时,根据电机控制,生成转矩,并且根据悬浮控制,使磁悬浮力被引导到转子。在该示例性情况下,基于第二分量电流和第三分量电流,确定第二转换器级的基准电流。
根据本发明的示例性和非限制性实施例的计算机程序包括用于控制可编程处理系统执行与根据本发明的上述示例性实施例中的任何一个的方法有关的动作的计算机可执行指令。
根据本发明的示例性且非限制性实施例的计算机程序包括用于控制电气驱动的可编程处理系统的软件装置,该电气驱动包括:
-包括定子和转子的电机,
-连接到所述定子的相绕组的端子的第一转换器级,
-连接到所述定子的相绕组的中间点的第二转换器级,所述相绕组的每一个包括所考虑的相绕组的端子和中间点之间的第一部分,以及所述相绕组的每一个除了所考虑的相绕组的第一部分之外还包括第二部分。
该软件装置包括用于控制可编程处理系统的计算机可执行指令以:
-确定第一分量电流i1Cu、i1Cv和i1Cw和第二分量电流i2Cu、i2Cv和i2Cw,使得当相绕组的第一部分承载第一分量电流和第二分量电流两者并且相绕组的第二部分至少承载第一分量电流时,根据电机控制生成转矩,并且根据悬浮控制将磁悬浮力引导到转子,
-基于第一分量电流和第二分量电流,确定第一转换器级的基准电流iref1u、iref1v和iref1w,以及
-至少基于第二分量电流,确定第二转换器级的基准电流iref2u、iref2v和iref2w。
该软件装置可以是例如通过适当的编程语言和通过适合于编程语言和所考虑的可编程处理系统的编译器实现的子例程或功能。值得注意的是,对应于适当的编程语言的源代码表示软件装置,因为源代码包含控制可编程处理系统以执行上述动作并且仅编译信息格式所需的信息。此外,可编程处理系统还可以具有解释器,从而通过适当的编程语言实现的源代码在运行之前不需要被编译。
根据本发明的示例性且非限制性实施例的计算机程序产品包括编码有根据本发明的示例性实施例所述的计算机程序的计算机可读介质,例如,光盘。
根据本发明的示例性且非限制性实施例的信号被编码成承载定义根据本发明的示例性实施例所述的计算机程序的信息。
上文给出的描述中所提供的具体示例不应被解读为限制所附权利要求的范围和/或适用性。以上给出的描述中提供的示例和示例组不是穷举,除非另有明确说明。
控制磁悬浮和转矩生成的控制设备和方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0