









专利摘要
本发明提供一种导航系统的解码和精确授时方法。采用了EPLD编程解码技术,使5MHz信号分别输入到4组74LS290进行分频以及2组74LS164的时钟端口中,分频后得到的1000Hz信号输入到2组74LS393中进行计数,得实时的毫秒数;2组74LS164分别使用1PPS信号和B码信号作为其输入,输出信号分别通过与1PPS信号相“与”和74LS290,可以得到1s信号和40Hz信号,实现了精确授时和多种同步信号的输出。本发明不仅可以精准的解码和授时,而且元器件通用简单,比较方便。
权利要求
1.一种导航系统的解码和精确授时方法,其特征在于,具体的实现步骤为:
步骤1.使用EPLD编程解码技术将RS-422接口接收的B码信号解码和精确授时,每个B码信号经过74LS123延时4ms产生的信号与1PPS信号之间进行“与”运算,每秒得到50个位移脉冲;
步骤2.将每秒50个位移脉冲作为7个级联74LS164的时钟信号,第一个74LS164的数据端接收B码信号;
步骤3.将第三个74LS164至第七个74LS164的部分引脚分别连接到第一个74LS374至第三个74LS374的输入端,作为时位、分位、秒位;所述的时位、分位、秒位的端口连接关系为:将第三个74LS164的Q7和第四个74LS164的Q0连接到第一个74LS374的输入端D2、D3作为十时位;第四个74LS164的Q2、Q3、Q4、Q5连接到第一个74LS374的输入端D4、D5、D6、D7作为时位;第五个74LS164的Q0、Q1、Q2连接到第二个74LS374的输入端D1、D2、D3作为十分位;第五个74LS164的Q4、Q5、Q6、Q7连接到第二个74LS374的输入端D4、D5、D6、D7作为分位;第六个74LS164的Q1、Q2、Q3连接到第三个74LS374的输入端D1、D2、D3作为十秒位;第六个74LS164的Q5、Q6、Q7和第七个74LS164的Q0连接到第三个74LS374的输入端D4、D5、D6、D7作为秒位;
步骤4.将代表“时”的74LS374和代表“秒”的74LS374的输出端口相连,并与代表“分”的74LS374输出端口连接到2组74LS245中,输出到CPU;
步骤5.将5MHz晶体振荡器输出的5MHz信号分别输入到4组74LS290进行分频,将得到的1000Hz信号输入到2组74LS393中进行计数,输出实时的毫秒数;
步骤6.将5MHz信号分别输入到2组74LS164的时钟端口中,一组74LS164的输入信号为1PPS信号,其Q1端口的输出信号和1PPS信号相“与”输出1s信号;另一组74LS164的输入信号为B码信号,其Q3端口的输出信号输入到另一个74LS290的CP0端,采用之前得到的1s信号作为其复位端的输入信号,在其Q0端口输出40Hz的信号。
2.根据权利要求1所述的一种导航系统的解码和精确授时方法,其特征在于:步骤1所述的每个B码信号经过74LS123延时4ms产生的信号为,B码信号每来一次上升沿,经过74LS123后,输出周期为10ms、宽度为4ms的矩形波信号。
3.根据权利要求1所述的一种导航系统的解码和精确授时方法,其特征在于:步骤2所述的7个级联74LS164,前一个74LS164的Q7输出端与后一个74LS164的输入端相连接;将每个74LS164的两个数据端连接到一起,B码信号输入到第一个74LS164的数据端。
4.根据权利要求1所述的一种导航系统的解码和精确授时方法,其特征在于:步骤4的具体内容为将1PPS信号输入到代表时分秒的3组74LS374的时钟端口,再将第一组代表“时”的74LS374的输出信号O0至O7与第三组代表“秒”的74LS374的输出信号O0至O7对应连接,并与第二组代表“分”的74LS374的信号输入到2组74LS245中供CPU读取。
5.根据权利要求1所述的一种导航系统的解码和精确授时方法,其特征在于:步骤5的具体内容为,第一个74LS290的CP1端接收5MHz的信号,并进行五分频,再将每个74LS290的Q3端连接至下一个74LS290的CP0端进行二分频,第二、第三和第四74LS290的Q0端连接到自身的CP1端进行五分频,由最后一个74LS290的Q3端输出1000Hz的信号输入到2组74LS393中,由第一个74LS393的A1端输入,每个74LS393的1QD端连接至自身的A2端,第一个74LS393的2QD端连接到第二个74LS393的A1端,所计数的16组输出信号锁存到2组74LS244中供CPU读取。
说明书
技术领域
本发明属于数字电子技术领域,具体涉及一种导航系统的解码和精确授时方法。
背景技术
伴随着电力电子技术、数字电子技术和自动控制技术的发展,军事上、科学上、生活上对时钟的精准度要求越来越高,因此对于IRIG-B码的解码方法变得尤为重要。IRIG是英文Inter Range Instrumentation Group的缩写。它的执行委员会是由美国各靶场的代表,三军代表是由国防部、国家航空航天局和国家标准局的代表组成。它的职责是负责靶场间的信息交换,制订标准、协调设备的研制和协调靶场间的相互配合。目前,IRIG标准已成为国际上通用标准,在欧洲、美洲、中国等国家处得到了广泛的应用。
IRIG时间标准有两大类:一类是并行时间码格式,这类码由于是并行格式,传输距离较近,且是二进制,因此远不如串行格式广泛;另一类是串行时间码,共有六种格式,即A、B、D、E、G、H。它们的主要差别是时间码的帧速率不同,IRIG-B码即为其中的B型码。B型码的时帧速率为1帧/秒;可传递100位的信息。IRIG-B码具用以下主要特点:携带信息量大,经译码后可获得1、10、100、1000c/s的脉冲信号和BCD编码的时间信息及控制功能信息,高分辨率;而且经过调制后的IRIG-B码带宽,适用于远距离传输;其还具有标准化的接口,在国际上通用等特点。因此IRIG-B码得到广泛应用。
在过去的技术中,常常利用一个电压模拟信号,使其同频同相但不同幅度。再将其与IRIG-B模拟信号进行电压比较,通过这种方法来实现对IRIG-B码的解码。这个过程实施起来比较不便,而且产生误差的几率较大,精准度不高。
发明内容
本发明的目的在于提供了一种导航系统的解码和精确授时方法,进行实时IRIG-B码解码和精确授时。
本发明的目的是这样实现的:
一种导航系统的解码和精确授时方法,具体的实现步骤为:
步骤1.使用EPLD编程解码技术将RS-422接口接收的B码信号解码和精确授时,每个B码信号经过74LS123延时4ms产生的信号与1PPS信号之间进行“与”运算,每秒得到50个位移脉冲;
步骤2.将每秒50个位移脉冲作为7个级联74LS164的时钟信号,第一个74LS164的数据端接收B码信号;
步骤3.将第三个74LS164至第七个74LS164的部分引脚分别连接到第一个74LS374至第三个74LS164的输入端,作为时位、分位、秒位;
步骤4.将代表“时”的74LS374和代表“秒”的74LS374的输出端口相连,并与代表“分”的74LS374输出端口连接到2组74LS245中,输出到CPU;
步骤5.将5MHz晶体振荡器输出的5MHz信号分别输入到4组74LS290进行分频,将得到的1000Hz信号输入到2组74LS393中进行计数,输出实时的毫秒数;
步骤6.将5MHz信号分别输入到2组74LS164的时钟端口中,一组74LS164的输入信号为1PPS信号,其Q1端口的输出信号和1PPS信号相“与”输出1s信号;另一组74LS164的输入信号为B码信号,其Q3端口的输出信号输入到另一个74LS290的CP0端,采用之前得到的1s信号作为其复位端的输入信号,在其Q0端口输出40Hz的信号。
步骤1所述的每个B码信号经过74LS123延时4ms产生的信号为,B码信号每来一次上升沿,经过74LS123后,输出周期为10ms、宽度为4ms的矩形波信号。
步骤2所述的7个级联74LS164,前一个74LS164的Q7输出端与后一个74LS164的输入端相连接;将每个74LS164的两个数据端连接到一起,B码信号输入到第一个74LS164的数据端。
步骤3所述的时位、分位、秒位的端口连接关系为,将第三个74LS164的Q7和第四个74LS164的Q0连接到第一个74LS374的输入端D2、D3作为十时位;第四个74LS164的Q2、Q3、Q4、Q5连接到第一个74LS374的输入端D4、D5、D6、D7作为时位;第五个74LS164的Q0、Q1、Q2连接到第二个74LS374的输入端D1、D2、D3作为十分位;第五个74LS164的Q4、Q5、Q6、Q7连接到第二个74LS374的输入端D4、D5、D6、D7作为分位;第六个74LS164的Q1、Q2、Q3连接到第三个74LS374的输入端D1、D2、D3作为十秒位;第六个74LS164的Q5、Q6、Q7和第七个74LS164的Q0连接到第三个74LS374的输入端D4、D5、D6、D7作为秒位。
步骤4的具体内容为将1PPS信号输入到代表时分秒的3组74LS374的时钟端口,再将第一组代表“时”的74LS374的输出信号O0至O7与第三组代表“秒”的74LS374的输出信号O0至O7对应连接,并与第二组代表“分”的74LS374的信号输入到2组74LS245中供CPU读取。
步骤5所述的具体内容为,第一个74LS290的CP1端接收5MHz的信号,并进行五分频,再将每个74LS290的Q3端连接至下一个74LS290的CP0端进行二分频,第二、第三和第四74LS290的Q0端连接到自身的CP1端进行五分频,由最后一个74LS290的Q3端输出1000Hz的信号输入到2组74LS393中,由第一个74LS393的A1端输入,每个74LS393的1QD端连接至自身的A2端,第一个74LS393的2QD端连接到第二个74LS393的A1端,所计数的16组输出信号锁存到2组74LS244中供CPU读取。
本发明的有益效果在于:本发明实现了对接收的时统B码进行精确解码和精确授时,实时解出时、分、秒;实现了多种同步信号的输出,可为其他设备提供同步信号使用;输出由1PPS清0的1ms计数值及50Hz中断信号;并接收外测HRP、FS中断信号输出给CPU中断控制器。
附图说明
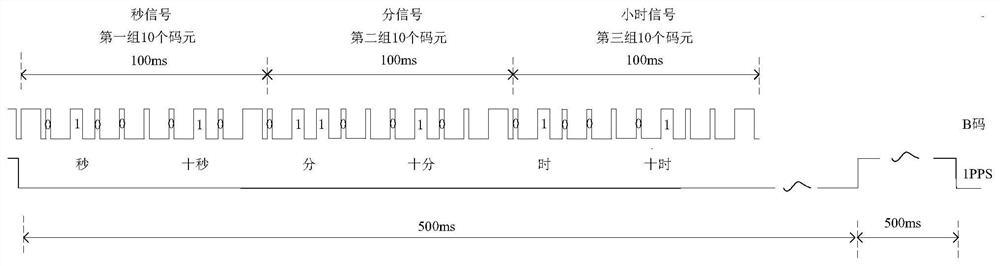
图1为B码信号与1PPS信号的逻辑关系图。
图2为74LS123功能表。
图3为由B码信号延时4ms得到74LS164移位脉冲CLK1的时序关系图。
图4为74LS164的引脚图。
图5为74LS164时序图。
图6为从B码中解出时、分、秒的原理示意图。
图7为74LS374的引脚图。
图8为74LS290的引脚图。
图9为74LS393的引脚图。
具体实施方式
下面结合附图对本发明做进一步的描述:
实施例1
本发明的目的是提供一种可以进行实时IRIG-B码解码和精确授时方法的方法,采用了EPLD编程解码技术,为实现上述目的,本发明采用以下技术方案:
本发明包括以下几个步骤:
第一步,标准B码信号每秒有100个码元,共包含10组信息,每组占10个码元。它包含有三种脉冲信号,如图1所示,2ms宽度的脉冲表示逻辑0,5ms的脉冲表示逻辑1,8ms脉冲表示每个码元的结束,也表示每个B码秒信号的起始,因此连续2个8ms的第二个8ms码元是秒信号的开始。在图1中,第一组连续10个码元是秒信号,起始码元为一个8ms的脉冲,接着是秒位(占4个码元)与十秒位(占3个码元),秒和十秒位间隔一个无效码元,它用2ms脉冲补上,最后一个码元是8ms宽的脉冲;第二组连续10个码元就是分信号,其中分位占4个码元、十分位占3个码元,分和十分位间隔一个无效位,最后一个码元是8ms宽的脉冲,其他为无效码元;第三组连续10个码元起始是小时信号,其中时位占4个码元,十时位占2个码元,时和十时位间隔一个无效码元,最后一个码元是8ms宽的脉冲,其他为无效码元用2ms脉冲补上;后面依次是年、月、日、……。
1PPS信号为标准的1Hz的方波信号,下降沿与秒信号开始处(第一个8ms宽脉冲的上升沿对齐),脉冲宽度的500ms,具体逻辑关系如图1所示。
第二步,将接收的B码信号输入到74LS123中,74LS123是常用的可重触发单稳态触发器,其功能表如图2所示,B码信号通过74LS123产生的信号会延迟4ms,并且B码信号每来一次上升沿,经过74LS123就会输出一个周期为10ms,宽度为4ms的矩形波,如图3所示。
第三步,将B码信号经过74LS123延时4ms产生的信号与1PPS信号相“与”每秒得到50个位移脉冲信号,作为7个级联74LS164的移位脉冲。74LS164是一个串入并出的8位移位寄存器,其引脚图和时序图如图4、图5所示。
第四步,将B码信号由第一个74LS164的数据端(俩个数据端连接到一起)进入,前一个74LS164的Q7输出端与后一个74LS164的输入端相连接;通过移位脉冲信号的触发,B码信号中大于5ms的码元作为1移入74LS164,小于5ms的码元作为0入74LS164,这与标准B码信号的传递的时间信息一致,从B码中分解出时分秒的原理示意图如图6所示。
第五步,将第三个74LS164的Q7和第四个74LS164的Q0连接到第一个74LS374的输入端D2、D3作为十时位;第四个74LS164的Q2、Q3、Q4、Q5连接到第一个74LS374的输入端D4、D5、D6、D7作为时位;第五个74LS164的Q0、Q1、Q2连接到第二个74LS374的输入端D1、D2、D3作为十分位;第五个74LS164的Q4、Q5、Q6、Q7连接到第二个74LS374的输入端D4、D5、D6、D7作为分位;
第六个74LS164的Q1、Q2、Q3连接到第三个74LS374的输入端D1、D2、D3作为十秒位;第六个74LS164的Q5、Q6、Q7和第七个74LS164的Q0连接到第三个74LS374的输入端D4、D5、D6、D7作为秒位;74LS374是具有三态输出的八D边沿触发器,可以置数全并行存取,缓存控制输入,时钟输入可以有效改善抗扰度的滞后作用;其引脚图如图7所示。
第六步,将1PPS信号输入到代表时分秒的3组74LS374的时钟输入端中,改善抗扰度的滞后作用;再将第一组代表“时”的74LS374的输出信号O0至O7与第三组代表“秒”的74LS374的输出信号O0至O7一一对应连接到一起,与第二组代表“分”的74LS374一同输入到2组74LS245中供CPU读取;74LS245是八路同相三态双向总线收发器,可以双向传输数据,为防止总线负载过高,这里接入74LS245作为总线驱动器。
第七步,将5MHz晶体振荡器输出的5MHz信号输入到4组74LS290进行分频,其引脚图如图8所示。其中第一个74LS290的CP1端连接到5MHz的信号进行五分频,再将每个74LS290的Q3端连接至下一个74LS290的CP0端进行二分频,第二、第三和第四74LS290的Q0端连接到自身的CP1端进行五分频,就可以在最后一个74LS290的Q3输出端输出1000Hz的信号。
第八步,将1000Hz的信号输入到2组74LS393中进行计数,其引脚图如图9所示。由第一个74LS393的A1端输入,每个74LS393的1QD端连接至自身的A2端,第一个74LS393的2QD端连接到第二个74LS393的A1端,再将2组74LS393所计数的16组信号锁存到2组74LS244中供CPU读取,即可获得当时毫秒数的计数。
第九步,将5MHz晶体振荡器输出的5MHz信号输入到2组74LS164的时钟端口中,其中一组采用1PPS信号作为其输入,在其Q1端口输出信号再与1PPS信号相“与”得到1s信号;另一组采用B码信号作为其输入,其Q3端口输出的信号输入到另一个74LS290的CP0端,之前得到的1s信号作为其复位端的输入信号,就可以在输出端Q0得到40Hz的信号;增加了同步信号的输出,可为其他设备提供同步信号使用。
实施例2
本发明属于数字电子技术领域,具体涉及一种导航系统的解码和精确授时方法。可以进行实时的B码解码,分解出时分秒,并进行精确授时。采用了EPLD编程解码技术,将接收到的每个B码信号经过74LS123产生的信号与1PPS信号之间进行“与”运算,每秒将得到50个位移脉冲作为7个级联74LS164的时钟信号,B码信号输入到第一个74LS164的数据端;将对应时分秒74LS164的Q端用1PPS打入3组74LS374作为时分秒。3组74LS374再输入到2组74LS245中供CPU读取,即可完成对B码的解码。使5MHz信号分别输入到4组74LS290进行分频以及2组74LS164的时钟端口中,分频后得到的1000Hz信号输入到2组74LS393中进行计数,得实时的毫秒数;2组74LS164分别使用1PPS信号和B码信号作为其输入,输出信号分别通过与1PPS信号相“与”和74LS290,可以得到1s信号和40Hz信号,实现了精确授时和多种同步信号的输出。采用上述技术方案的本发明,不仅可以精准的解码和授时,而且元器件通用简单,比较方便。
第一步,将RS-422接口接收到的每个B码信号经过74LS123延时4ms产生信号,其中,B码信号每来一次上升沿,经过74LS123就会输出一个周期为10ms,宽度为4ms的矩形波。
第二步,将1PPS方波信号的下降沿与B码经过74LS123延时4ms产生信号的秒信号开始处(第一个8ms宽脉冲的上升沿对齐)对齐,B码信号经过74LS123延时4ms产生的信号与1PPS信号之间进行“与”运算,每秒将得到50个位移脉冲。
第三步,将每秒得到的50个位移脉冲作为7个级联74LS164的时钟信号,B码信号输入到第一个74LS164的数据端;前一个74LS164的Q7输出端与后一个74LS164的输入端相连接。
第四步,将第三个74LS164的Q7和第四个74LS164的Q0连接到第一个74LS374的输入端D2、D3作为十时位;第四个74LS164的Q2、Q3、Q4、Q5连接到第一个74LS374的输入端D4、D5、D6、D7作为时位。
第五步,将第五个74LS164的Q0、Q1、Q2连接到第二个74LS374的输入端D1、D2、D3作为十分位;第五个74LS164的Q4、Q5、Q6、Q7连接到第二个74LS374的输入端D4、D5、D6、D7作为分位。
第六步,将第六个74LS164的Q1、Q2、Q3连接到第三个74LS374的输入端D1、D2、D3作为十秒位;第六个74LS164的Q5、Q6、Q7和第七个74LS164的Q0连接到第三个74LS374的输入端D4、D5、D6、D7作为秒位。
第七步,将1PPS信号输入到代表时分秒的3组74LS374的时钟输入端中,再将第一组代表“时”的74LS374的输出信号O0至O7和第三组代表“秒”的74LS374的输出信号O0至O7一一对应连接到一起,与第二组代表“分”的74LS374一同输入到2组74LS245中供CPU读取,即可完成对B码的解码,分解出时分秒,供系统读取。
第八步,将5MHz晶体振荡器输出的5MHz信号输入到4组74LS290进行分频,输出1000Hz的信号输入到2组74LS393中进行计数,由第一个74LS393的A1端输入,每个74LS393的1QD端连接至自身的A2端,第一个74LS393的2QD端连接到第二个74LS393的A1端,再将2组74LS393所计数的16组信号锁存到2组74LS244中供CPU读取,读出当时的毫秒数。
第九步,将5MHz晶体振荡器输出的5MHz信号输入到2组74LS164的时钟端口中,分别使用1PPS信号和B码信号作为其输入,前者Q1端口输出的信号再与1PPS信号相“与”获得1s信号;后者Q3端口输出的信号输入到另一个74LS290的CP0端,再将1s信号作为其复位端的输入信号,就可以在其输出端Q0得到40Hz的信号,实现了多种同步信号的输出,可为其他设备提供同步信号使用。
实施例3
一种导航系统的解码和精确授时方法,对RS-422接口接收的B码信号解码和精确授时使用了EPLD编程解码技术,将接收到的每个B码信号经过74LS123延时4ms产生的信号与1PPS信号之间进行“与”运算;产生的脉冲作为7个级联74LS164的时钟信号,B码信号输入到第一个74LS164的数据端;将第三个74LS164至第七个74LS164的部分引脚连接到三组74LS374的输入端分别作为时分秒;再将代表“时”的74LS374和代表“秒”的74LS374的输出信号对应连相连,与代表“分”的74LS374一同输入到2组74LS245中供CPU读取;使5MHz信号分别输入到4组74LS290进行分频得到的1000Hz信号输入到2组74LS393中进行计数,得实时的毫秒数;5MHz信号分别输入到2组74LS164的时钟端口中,2组74LS164分别使用1PPS信号和B码信号作为其输入,输出信号分别通过与1PPS信号相“与”和74LS290,可以得到1s信号和40Hz信号,完成了毫秒数的技术和多种同步信号的输出。
所述的将接收到的每个B码信号经过74LS123延时4ms产生的信号与1PPS信号之间进行“与”运算,B码信号通过74LS123产生的信号会延迟4ms,并且B码信号每来一次上升沿,经过74LS123就会输出一个周期为10ms,宽度为4ms的矩形波,产生信号与1PPS信号相“与”每秒得到50个位移脉冲信号。
产生的脉冲作为7个级联74LS164的时钟信号,B码信号输入到第一个74LS164的数据端,每秒得到50个位移脉冲信号作为7个级联74LS164的时钟信号,前一个74LS164的Q7输出端与后一个74LS164的输入端相连接;将每个74LS164的俩个数据端连接到一起,再将B码信号输入到第一个74LS164的数据端。
所述的将第三个74LS164至第七个74LS164的部分引脚连接到三组74LS374的输入端分别作为时分秒,将第三个74LS164的Q7和第四个74LS164的Q0连接到第一个74LS374的输入端D2、D3作为十时位;第四个74LS164的Q2、Q3、Q4、Q5连接到第一个74LS374的输入端D4、D5、D6、D7作为时位;第五个74LS164的Q0、Q1、Q2连接到第二个74LS374的输入端D1、D2、D3作为十分位;第五个74LS164的Q4、Q5、Q6、Q7连接到第二个74LS374的输入端D4、D5、D6、D7作为分位;第六个74LS164的Q1、Q2、Q3连接到第三个74LS374的输入端D1、D2、D3作为十秒位;第六个74LS164的Q5、Q6、Q7和第七个74LS164的Q0连接到第三个74LS374的输入端D4、D5、D6、D7作为秒位。
所述的再将代表“时”的74LS374和代表“秒”的74LS374的输出信号对应连相连,与代表“分”的74LS374一同输入到2组74LS245中供CPU读取,于将1PPS信号输入到代表时分秒的3组74LS374的时钟输入端中,再将第一组代表“时”的74LS374的输出信号O0至O7与第三组代表“秒”的74LS374的输出信号O0至O7一一对应连接到一起,与第二组代表“分”的74LS374一同输入到2组74LS245中供CPU读取。
所述的使5MHz信号分别输入到4组74LS290进行分频得到的1000Hz信号输入到2组74LS393中进行计数,得实时的毫秒数,第一个74LS290的CP1端连接到5MHz的信号进行五分频,再将每个74LS290的Q3端连接至下一个74LS290的CP0端进行二分频,第二、第三和第四74LS290的Q0端连接到自身的CP1端进行五分频,由最后一个74LS290的Q3端输出1000Hz的信号输入到2组74LS393中,由第一个74LS393的A1端输入,每个74LS393的1QD端连接至自身的A2端,第一个74LS393的2QD端连接到第二个74LS393的A1端,所计数的16组输出信号锁存到2组74LS244中供CPU读取。
所述的5MHz信号分别输入到2组74LS164的时钟端口中,2组74LS164分别使用1PPS信号和B码信号作为其输入,输出信号分别通过与1PPS信号相“与”和74LS290,可以得到1s信号和40Hz信号,其中一组74LS164采用1PPS信号作为其输入,在其Q1端口输出信号再与1PPS信号相“与”得到1s信号;另一组74LS164采用B码信号作为输入,Q3端口输出信号输入到另一个74LS290的CP0端,采用之前得到的1s信号作为其复位端的输入信号,在其输出端Q0就可以得到40Hz的信号。
一种导航系统的解码和精确授时方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。



动态评分
0.0