






专利摘要
本发明公开了一种土壤剖面电导率测量方法及装置。将能水平和垂直移动的装置移动到待测土壤地表,并通过该装置上的GPS设备自动记录地理位置信息;通过第一步进电机把该装置抬高到距离地面1.5m,再通过第二步进电机,来控制该装置的水平和垂直位置,进行归零校正程序;在0.05~1.5m(装置脚轮高度为5cm)之间采集N个高度的水平、垂直模式下的电导率,的高度和角度分别由施加在第一、第二步进电机上的脉冲信号决定,并通过触发开关来控制该装置的测试和数据记录;最后将GPS数据、该装置离地表高度值及相应高度电导率测量数据传输到数据存储器。不用挖掘土壤剖面,利用电磁感应线性模型结合Tikhonov正则化方法准确地反演剖面电导率。
说明书
技术领域技术领域
本发明涉及电导率测量方法及装置,尤其是涉及一种土壤剖面电导率测量方法及装置。
技术背景背景技术
盐分是盐碱土壤质量和作物产量的重要影响因子,严重时导致农用土壤的荒弃。为了有效地管理和利用围垦的滨海盐土,为土壤管理提供科学的决策依据,需要对土壤盐分进行频繁的监测。类似挖掘、钻孔和锥形透度计等侵入式的采样模式是土壤剖面采样最常用的方法,但由于费时且费用高等不利因素限制了这类方法只能采集有限的采样点,不适合进行大面积的土壤剖面盐分调查。因此,急需一种非侵入式的廉价而且便捷的剖面探测技术。
传统的剖面电导率测量方法是通过挖掘出土壤剖面后测定的,主要方法有:(1)采集土壤样品,经化学实验测定电导率值;(2)采用土壤电导率测试装置进行现场测量。该类装置基于“电流-电压四端法”的接触式设计,如美国VerisTechnology公司生产的Veris3100土壤电导率检测仪,在测量时不需要取样,相对更加便捷(Jabro J D,Evans R G,Stevens W B,et al.Repeatability of SoilApparent Electrical Conductivity Measured by the Veris 3100 Sensor.Soil Science,2008,173:35-45)。但这两种方法的前期挖掘剖面的准备工作费时费力,为了能够提高效率,研究者们开发了新的方法。
利用基于电磁感应原理的非侵入式设计来获取剖面土壤电导率,即向仪器内部的发射线圈通入交变流电,而用接受线圈来感应土壤中磁场的变化,通过所测磁场的变化来表征土壤电导率(Soil Apparent Electrical Conductivity,ECa)。该类型设备的典型代表产品是加拿大Geonics公司生产的EM38,该仪器外形呈条形,重量较轻,与高精度的差分GPS连接,对地表进行扫描就能快速获取带有二维空间坐标的土壤剖面电导率。EM38在水平模式下的探测深度为0.75m,垂直模式下的探测深度达1.50m,但测得的电导率是整个1.5米土壤剖面电导率的状况,只有一个测量值,不能获得1.5米土壤剖面中逐层的土壤电导率变化的一系列电导率参数(McNeill J D.Electromagnetic terrain conductivity measurementat low induction numbers.Tech.Note TN-6.Geonics,ON,Canada,1980)。
因此,有学者通过建立地表测量的土壤电导率ECa与不同土层深度实测电导率的经验模型来获取剖面电导率(Slavich P G.Determining ECa depth profilesfrom electromagnetic induction measurements.Aust.J.Soil Res,1990,28:443-452)。尽管该类型模型的预测精度较高,但实践证明该类型模型推广到土壤属性不同的田块剖面电导率预测时需要重新进行校正(Borchers B,Uram T,Hendrickx J MH.Tikhonov regularization of electrical conductivity depth profiles in field soils.SoilSci.Soc.Am.J,1997,61:1004-1009)。因此,有必要建立一种通用的土壤剖面电导率预测模型,并设计新的装置来快速测量距离表土不同高度的土壤电导率ECa,采用EM38电导率剖面电磁感应响应模型通过解最小二乘问题的方法来预测电导率。
在上述研究中,对同类土壤电导率测量装置及剖面电导率预测方法的研究尚未见报道。
发明内容发明内容
为了克服现有土壤电导率检测仪不能直接测量三维剖面电导率的缺陷,本发明的目的在于提供一种土壤剖面电导率测量方法及装置。
本发明采用的技术方案是:
一、一种土壤剖面电导率测量方法,该方法的步骤如下:
1)装置定位:将装置移动到待测土壤地表,并通过土壤电导率检测仪上的GPS设备自动记录地理位置信息;
2)土壤电导率检测仪归零校正:通过装置上的第一步进电机把土壤电导率检测仪抬高到距离地面1.5m高的位置,再通过第二步进电机,来控制土壤电导率检测仪的水平和垂直位置,进行归零校正程序;
3)自动升降并记录数据:通过升降土壤电导率检测仪在0.05~1.5m之间采集N个高度水平、垂直模式下的电导率,土壤电导率检测仪的高度和角度分别由施加在第一步进电机和第二步进电机上的脉冲信号决定,并通过触发开关来控制土壤电导率检测仪的测试和数据记录。最后将GPS数据、土壤电导率检测仪离地表高度值和不同高度电导率测量据全部传输到电脑中。
其数据处理的步骤如下:
1)将数据存储器中的数据导入电脑中,获得地表以上不同高度的N个水平、垂直模式下的电导率值以及土壤电导率检测仪离地表的高度值,存放在电脑中;
2)计算地表N个高度位置的理论电导率:假设将土壤分为M层,最底层M延伸到地核深度。根据土壤电导率检测仪水平、垂直模式下的灵敏度模型,计算采集的h1,h2,...hN等N个高度处的理论电导率m(σ),存放在电脑中;
3)反演剖面电导率值:通过L-曲线法则选择最佳Tikhonov正则化参数λ,将λ代入Tikhonov正则化方程,反演剖面电导率σ,存放在电脑中;
4)整个计算采用Matlab编程实现。
二、一种土壤剖面电导率测量装置:
由四根连接杆和两块端板组成检测装置的框架,两根丝杆分别通过上下第一轴承和上下第一轴承座安装在各自的端板上,两个蜗轮分别固定在各自丝杆上方,两个滑块分别安装在两个蜗轮下方的两根丝杆上,两块固定块的一端分别通过连接轴和各自的第三轴承与滑块转动连接,土壤电导率检测仪安装在两块固定块的另一端间,用调节旋钮固定,蜗杆分别通过各自第二轴承和各自第二轴承座安装在两块端板之间,第二齿轮固定在第一丝杆一侧的蜗杆上,蜗轮与蜗杆相啮合,第一步进电机通过第一步进电机支架固定在第一丝杆一侧的端板上,第一齿轮固定在第一步进电机的旋转轴上,第一齿轮与第二齿轮相啮合,第二步进电机固定在第一丝杆一侧的滑块上,第三齿轮固定在第二步进电机的旋转轴上,第四齿轮固定在一侧的滑块上,第三齿轮和第四齿轮相啮合,带动土壤电导率检测仪转动,四个脚轮安装在端板底部,电脑与土壤电导率检测仪相连。
本发明具有的有益效果是:
利用电磁感应线性模型结合Tikhonov正则化方法来反演剖面电导率,不用挖掘土壤剖面,能快捷准确地预测土壤的剖面电导率。
附图说明附图说明
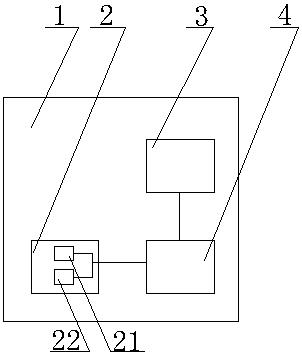
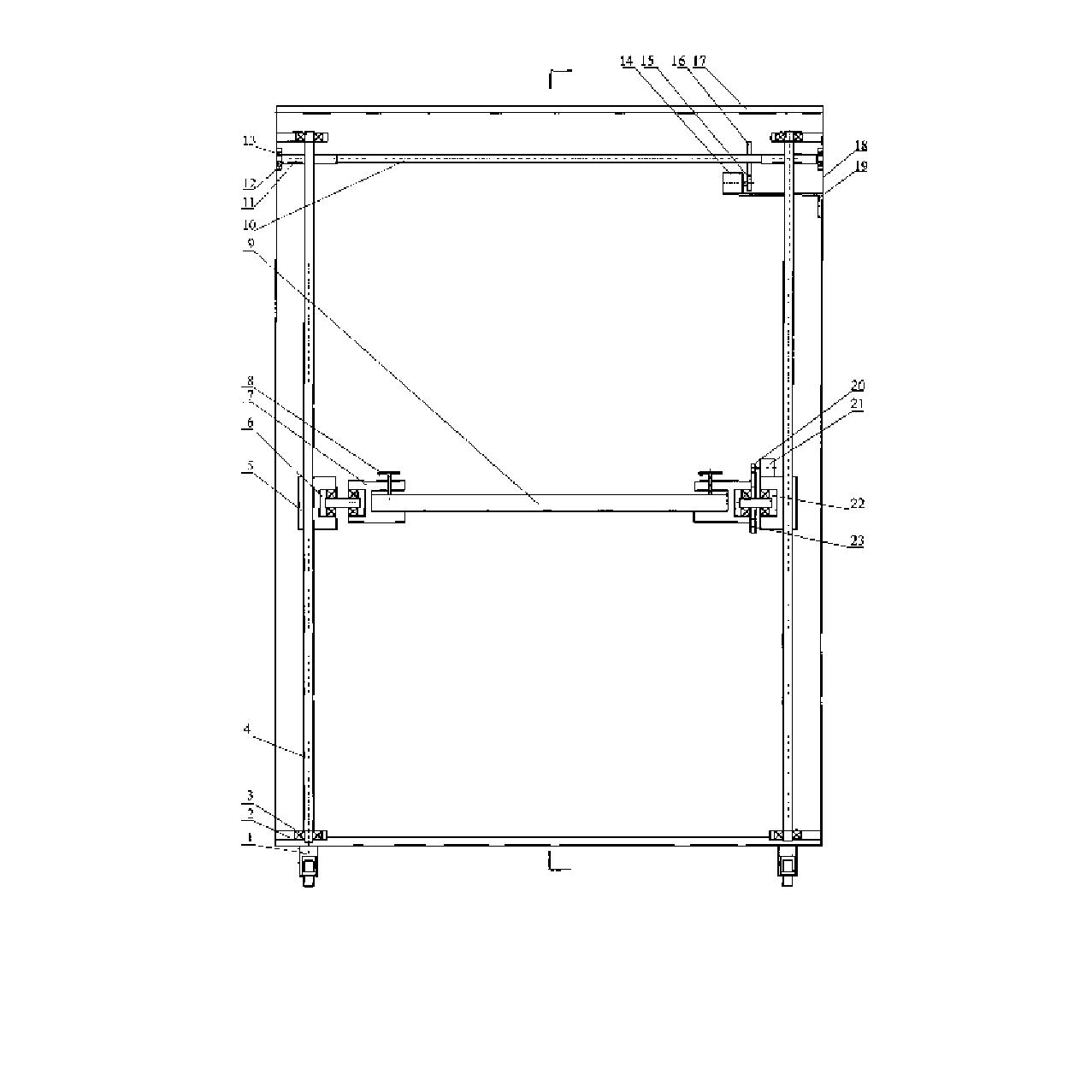
图1是本发明的测量装置结构示意图。
图2是图1的剖面图。
图3是土壤分层模型。
图4是样点1的剖面电导率反演结果。
图5是样点2的剖面电导率反演结果。
图中:1、脚轮,2、第一轴承座,3、第一轴承,4、丝杆,5、滑块,6、连接轴,7、固定块,8、旋钮,9、土壤电导率检测仪,10、蜗杆,11、蜗轮,12、第二轴承座,13、第二轴承,14、第一步进电机,15、第一齿轮,16、第二齿轮,17、连接杆,18、端板,19、第一步进电机支架,20、第三齿轮,21、第二步进电机,22、第三轴承,23、第四齿轮。
具体实施方式具体实施方式
下面结合附图和实施例对本发明作进一步说明。
如图1、图2所示,本发明由四根连接杆17和两块端板18组成检测装置的框架,两根丝杆4分别通过上下第一轴承3和上下第一轴承座2安装在各自的端板18上,两个蜗轮11分别固定在各自丝杆4上方,两个滑块5分别安装在两个蜗轮下方的两根丝杆4上,两块固定块7的一端分别通过连接轴6和各自的第三轴承22与滑块5转动连接,土壤电导率检测仪9安装在两块固定块7的另一端间,用调节旋钮8固定,蜗杆10分别通过各自第二轴承13和各自第二轴承座12安装在两块端板18之间,第二齿轮16固定在第一丝杆4一侧的蜗杆10上,蜗轮11与蜗杆10相啮合,第一步进电机14通过第一步进电机支架19固定在第一丝杆4一侧的端板18上,第一齿轮15固定在第一步进电机14的旋转轴上,第一齿轮15与第二齿轮16相啮合,第二步进电机21固定在第一丝杆4一侧的滑块5上,第三齿轮20固定在第二步进电机21的旋转轴上,第四齿轮23固定在一侧的滑块5上,第三齿轮20和第四齿轮23相啮合,带动土壤电导率检测仪9转动,四个脚轮1安装在端板底部,电脑与土壤电导率检测仪9相连。
该方法的步骤如下:
1)装置定位:将装置移动到待测土壤地表,并通过土壤电导率检测仪上的GPS设备自动记录地理位置信息;
2)土壤电导率检测仪归零校正:通过装置上的第一步进电机把土壤电导率检测仪抬高到距离地面1.5m高的位置,再通过第二步进电机,来控制土壤电导率检测仪的水平和垂直位置,进行归零校正程序;
3)自动升降并记录数据:通过升降土壤电导率检测仪在0.05~1.5m(装置脚轮高度为5cm)之间采集N个高度的水平、垂直模式下的电导率,土壤电导率检测仪的高度和角度分别由施加在第一步进电机和第二步进电机上的脉冲信号决定,并通过触发开关来控制土壤电导率检测仪的测试和数据记录。最后将GPS数据、土壤电导率检测仪离地表高度值和不同高度电导率测量数据全部传输到电脑中。
测量时,给第一步进电机14一定的脉冲信号,第一步进电机14发生旋转运动,并通过固定在其旋转轴上的第一齿轮15将旋转运动经第二齿轮16、蜗杆10、蜗轮11分别传递到2根丝杆4上,丝杆4的旋转运动使滑块5发生纵向运动,并通过带动连接轴6、第三轴承22和固定块7传递给土壤电导率检测仪9,使土壤电导率检测仪9的高度发生变化。
给第二步进电机21一定的脉冲信号,第二步进电机21发生旋转运动,并通过固定在其旋转轴上的第三齿轮20将旋转运动经第四齿轮23、滑块5给土壤电导率检测仪9,使土壤电导率检测仪9的角度发生变化。
土壤电导率检测仪9的高度和角度分别由施加在第一步进电机14和第二步进电机21上的脉冲信号决定。
土壤电导率检测仪在5,10,20,30,40,50,60,75,90,100,120,150cm等12个高度采集水平、垂直模式下的电导率,即每个剖面共采集24个电导率数据 及GPS数据、电导率检测仪离地表高度值记录在电脑中。
数据处理的步骤如下:
1)将数据存储器中的数据导入电脑中,获得地表以上不同高度的N个水平、垂直模式下的电导率值以及土壤电导率检测仪离地表的高度值,存放在电脑中;
将采集到的土壤N个高度位置(记为hi,i<N,hi≤1.50m)水平、垂直模式下的电导率ECa,记为向量d:
式中
d——N个高度位置水平、垂直模式下实测电导率向量,
——在高度hi处垂直模式下的实测电导率,
——在高度hi处水平模式下的实测电导率,
2)计算地表N个高度位置的理论电导率:假设将土壤分为M层,最底层M延伸到地核深度,土壤分层模型见图3。根据土壤电导率检测仪水平、垂直模式下的灵敏度模型,计算采集的h1,h2,...hN等N个高度处的理论电导率m(σ),存放在电脑中;
按式(2)~(4)的线性模型预测电导率仪在样点5,10,20,30,40,50,60,75,90,100,120,150cm等高度处的水平、垂直模式下的理论电导率,记为m(σ)。在土壤分层模型中,m(σ)可表示为式(7)~(9)。
m(σ)=[mv(h1),mv(h2),…,mv(hn),mH(h1),mH(h2),…,mH(hn)]T (6)
m(σ)=Kσ (7)
σ=[σ1,σ2…σM-1,σM]T (8)
z——土层深度,
φH(z)——电导率仪水平模式下的灵敏度函数,
φV(z)——电导率仪垂直模式下的灵敏度函数,
h——电导率仪离地表的高度,
m(σ)表示在深度z处的真实土壤电导率,
σH(h)——水平模式下电导率仪离地表高度h处的电导率预测值,
σV(h)——垂直模式下电导率仪离地表高度h处的电导率预测值,
σ——土壤M个不同深度土层的实际电导率向量,
K——线性模型相对测量高度的积分方程;
3)反演剖面电导率值:通过L-曲线法则选择最佳Tikhonov正则化参数λ,将λ代入Tikhonov正则化方程,反演剖面电导率σ,存放在电脑中。
由于电导率不能为负值,为了使线性模型预测的电导率理论值m(σ)和实测值d的差异最小,因此,可简化为解非负最小二乘问题。由于K为病态矩阵,解病态矩阵的最小二乘问题对于d的细小误差会导致参数估值较大的偏差,按式(11)Tikhonov正则化方法能较好的解决上述问题。按式(13)计算L曲线的曲率,并自动选择曲率最大的“拐点”来确定最优Tikhonov正则化参数λ。将最优参数λ代入式(11)中,重新反演剖面电导率。
min||Kσ-d||2+λ2||Lσ||2,(σ>=0) (11)
d——在5,10,20,30,40,50,60,75,90,100,120,150cm等高度处电导率仪的实测电导率值,
λ——Tikhonov正则化参数,
k(λ)——L-曲线的曲率,
p——p=Ln(||Kσ-d||2),
q——q=Ln(||Lσ||2),
p’——p的一阶导数,
q’——q的一阶导数,
p”——p的二阶导数,
q”——q的二阶导数;
模型预测精度分析,以模型反演的5、15、25、35、45、55、67.5、82.5、95、110cm深度处的电导率为例,与WET Sensor实测的各土层ECb电导率按式(14)评价整个剖面预测精度。将预测结果和实测值绘制在图4,图5所示的图表上。图4和图5的横轴为土层深度,纵轴电导率。
对上述2个样本进行的试验表明,模型的预测误差分别为:28.35%和31.03%,预测精度较高,能较好的预测出剖面电导率。
4)整个计算采用Matlab编程实现,已经申请到国家计算机软件著作权登记证书(登记号2008SR17746)。
土壤剖面电导率测量方法及装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0