








专利摘要
本发明公开了一种基于复合模型预测控制的航空发动机直接推力控制方法,利用非线性预测模型控制方法对发动机推力进行直接控制;所述非线性预测模型控制方法中所使用的预测模型为基于发动机状态变量模型、卡尔曼滤波器、发动机非线性模型所建立的复合预测模型,所述卡尔曼滤波器利用发动机测量参数值和发动机非线性模型计算值之差计算得到发动机退化量并将其反馈到发动机非线性模型,发动机非线性模型计算出发动机不可测参数并将其与发动机退化量一起反馈至发动机状态变量模型,发动机状态变量模型通过实时滚动优化求出预测控制量。相比现有技术,本发明可有效提高发动机模型预测控制的实时性。
权利要求
1.基于复合模型预测控制的航空发动机直接推力控制方法,其特征在于,利用非线性预测模型控制方法对发动机推力进行直接控制;所述非线性预测模型控制方法中所使用的预测模型为基于发动机状态变量模型、卡尔曼滤波器、发动机非线性模型所建立的复合预测模型,所述卡尔曼滤波器利用发动机测量参数值和发动机非线性模型计算值之差计算得到发动机退化量并将其反馈到发动机非线性模型,发动机非线性模型计算出发动机不可测参数并将其与发动机退化量一起反馈至发动机状态变量模型,发动机状态变量模型通过实时滚动优化求出预测控制量。
2.如权利要求1所述基于复合模型预测控制的航空发动机直接推力控制方法,其特征在于,所述发动机状态变量模型具体如下:
其中,u∈R
3.如权利要求2所述基于复合模型预测控制的航空发动机直接推力控制方法,其特征在于,所述卡尔曼滤波器使用如下方法对发动机退化量进行估计:
其中,u∈R
4.如权利要求1所述基于复合模型预测控制的航空发动机直接推力控制方法,其特征在于,所述发动机非线性模型为发动机部件级模型。
5.如权利要求1所述基于复合模型预测控制的航空发动机直接推力控制方法,其特征在于,所述复合预测模型使用以下相似条件:
M
其中,A
6.如权利要求1所述基于复合模型预测控制的航空发动机直接推力控制方法,其特征在于,发动机状态变量模型通过对以下优化模型进行实时滚动优化求出预测控制量:
其中,r为发动机控制指令;N
说明书
技术领域
本发明属于航空宇航推进理论与工程中的系统控制与仿真技术领域,具体涉及一种基于复合模型预测控制的航空发动机直接推力控制方法。
背景技术
如何快速精确地为飞行器提供推力是航空发动机重要性能指标。传统航空发动机控制器通过控制与推力特别相关的发动机可测参数,如转子转速和发动机增压比,来间接控制推力。然而,由于航空发动机在服役周期中,随着自然的磨损、腐蚀等原因引起发动机退化,而且在制造安装中都会产生公差,这些会使得这些可测参数与需求推力的映射关系产生偏差,如果继续使用控制与推力相关的可测参数,其控制误差不可避免。此外,航空发动机在运行时还得满足各种限制,如涡轮前温度、喘振裕度和转子转速等限制,传统控制器会使用限制线,然后进行高低选择。这些限制线随着发动机退化之后精度也发生变化,而且对于不可测参数,如喘振裕度和涡轮前温度,控制器设计时往往要保留很大的裕度,以保证发动机在最恶劣的工作点都能安全运行。
为此,基线模式被提出并得到大量的研究,取得很好的控制效果,该模式一个重要特征是直接以发动机推力为控制目标,实现了推力的精确控制。模型预测控制(MPC,ModelPredictive Control)是模型基控制中的关键技术,同时也是智能发动机控制的重要发展方向,它是在满足发动机运行的各种机械气动限制,如喘振裕度、涡轮前温度、转子转速、执行结构等诸多限制的条件下,以某个性能,如最小耗油率、最低涡轮前温度、最大推力等指令,为优化指标,最优地求解出控制量。从其原理可看出,预测控制在过渡态控制中考虑机械限制,比传统控制器得到更优的加速曲线,而最后稳定时,又可以取得良好的性能,因而,模型预测控制在发动机控制领域引起极大兴趣。
Van Essen H A将NMPC用于燃气涡轮装置上进行实验,取得良好的控制效果,Decastro J A提出基于线性变参数的MPC用于控制涡扇发动机涡轮叶片间隙控制,并验证了该技术可应用于航空发动机控制。针对民用航空发动机,Richter提出多路方法计算控制变量,该方法能在控制性能不变的情况下,降低了NMPC的计算量。Saluru分析了NMPC在航空发动机控制领域发展前景,并用仿真实验验证了NMPC可以代替传统的PID控制器。由于发动机在服役过程中会发生退化,因而Brunell使用扩展卡尔曼EKF估计发动机退化量,对用MPC进行控制,取得良好的控制效果,Viassolo提出EKF的NMPC对发动机性能参数,如发动机推力、耗油率,进行直接控制。由于基于EKF的NMPC控制精度高,而且可应用发动机退化情况下,因而备受关注,然而,EKF是通过部件级模型在线线性化,由于部件级模型计算复杂度高,而发动机是强非线性对象,因此对于单步计算时间要求必须短,因而EKF实时性难以保证。
发明内容
本发明所要解决的技术问题在于克服现有技术不足,提供一种基于复合模型预测控制的航空发动机直接推力控制方法,可有效提高发动机模型预测控制的实时性。
本发明具体采用以下技术方案解决上述技术问题:
基于复合模型预测控制的航空发动机直接推力控制方法,利用非线性预测模型控制方法对发动机推力进行直接控制;所述非线性预测模型控制方法中所使用的预测模型为基于发动机状态变量模型、卡尔曼滤波器、发动机非线性模型所建立的复合预测模型,所述卡尔曼滤波器利用发动机测量参数值和发动机非线性模型计算值之差计算得到发动机退化量并将其反馈到发动机非线性模型,发动机非线性模型计算出发动机不可测参数并将其与发动机退化量一起反馈至发动机状态变量模型,发动机状态变量模型通过实时滚动优化求出预测控制量。
优选地,所述发动机状态变量模型具体如下:
其中,u∈R
进一步优选地,所述卡尔曼滤波器使用如下方法对发动机退化量进行估计:
其中,u∈R
优选地,所述发动机非线性模型为发动机部件级模型。
为了使得模型能适应全包线,优选地,所述复合预测模型使用以下相似条件:
Ma=const,P3cor=const,A8=const
其中,A8为尾喷管喉道面积,Ma为飞行马赫数,P3cor为压气机出口的换算压力,const表示常量。
为了使得非线性模型预测控制能够实时跟踪上油门指令,优选地,发动机状态变量模型通过对以下优化模型进行实时滚动优化求出预测控制量:
其中,r为发动机控制指令;Nu和Np分别称为控制时域和预测时域; 为预测模型对指令变量的估计值;Δu为发动机控制量的前后时刻之差,即Δu(k+i)=u(k+i)-u(k+i-1),Q和R为半正定矩阵;Wfb为主燃油流量,A8为尾喷管喉道面积,αf为风扇导叶角角度,αc为风扇导叶角角度,Nf为风扇相对换算转速,Nc为压气机相对换算转速,Smf为风扇喘振裕度,Smc为压气机喘振裕度,T41为涡轮进口温度;下标“min”、“max”分别表示最小、最大设定值,上标“T”表示转置矩阵。
相比现有技术,本发明技术方案具有以下有益效果:
本发明基于发动机状态变量模型、卡尔曼滤波器、发动机非线性模型所建立的复合预测模型,利用非线性预测模型控制方法对发动机推力进行直接控制,在控制量求解过程中只需计算一次发动机非线性模型,其实时性得到显著提高。
附图说明
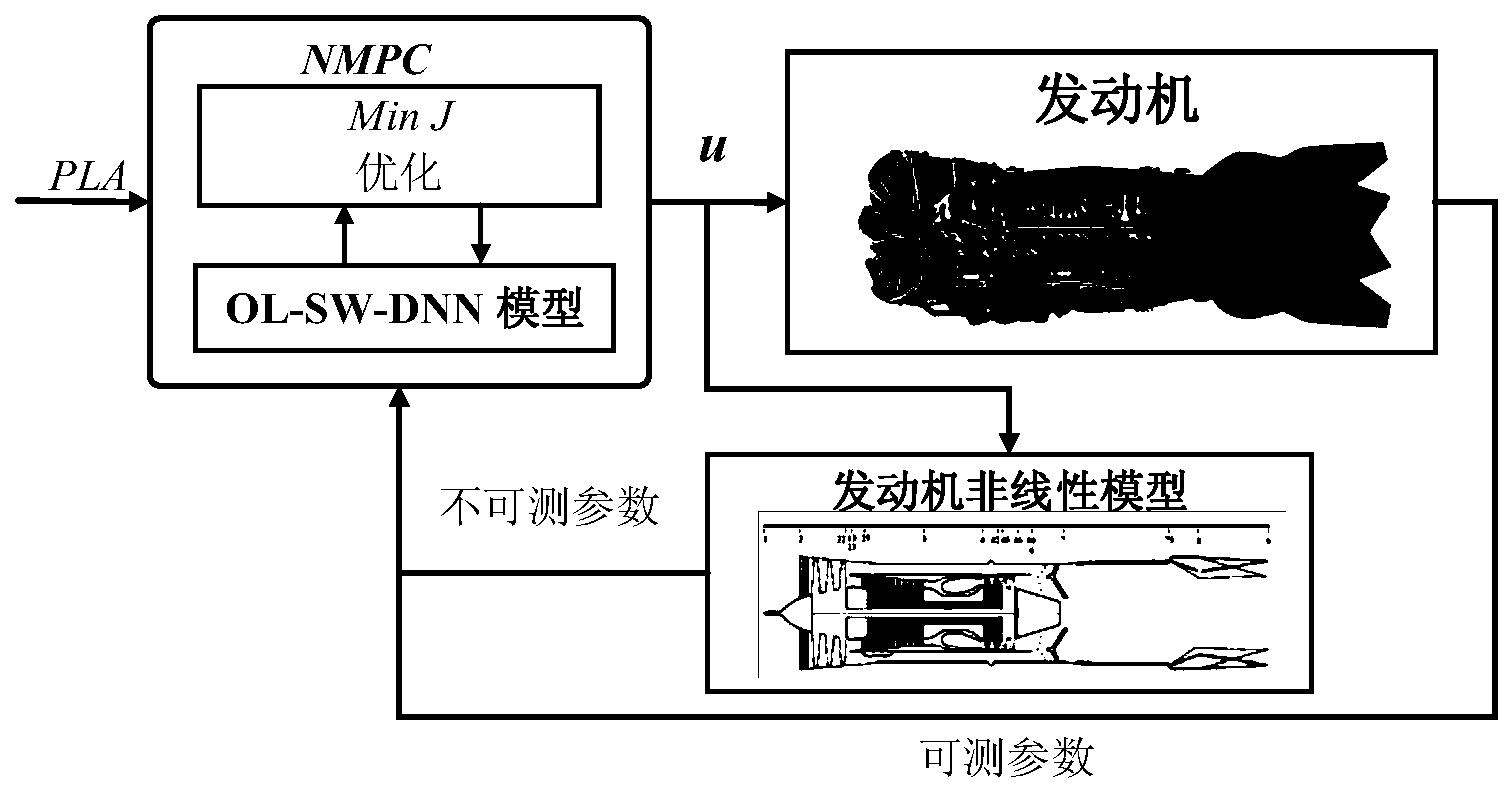
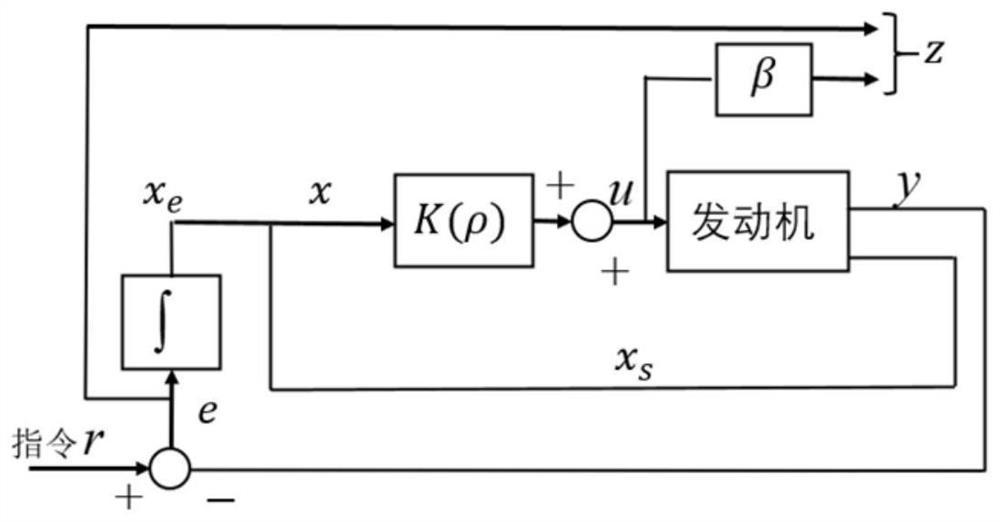
图1为本发明的航空发动机控制原理示意图;
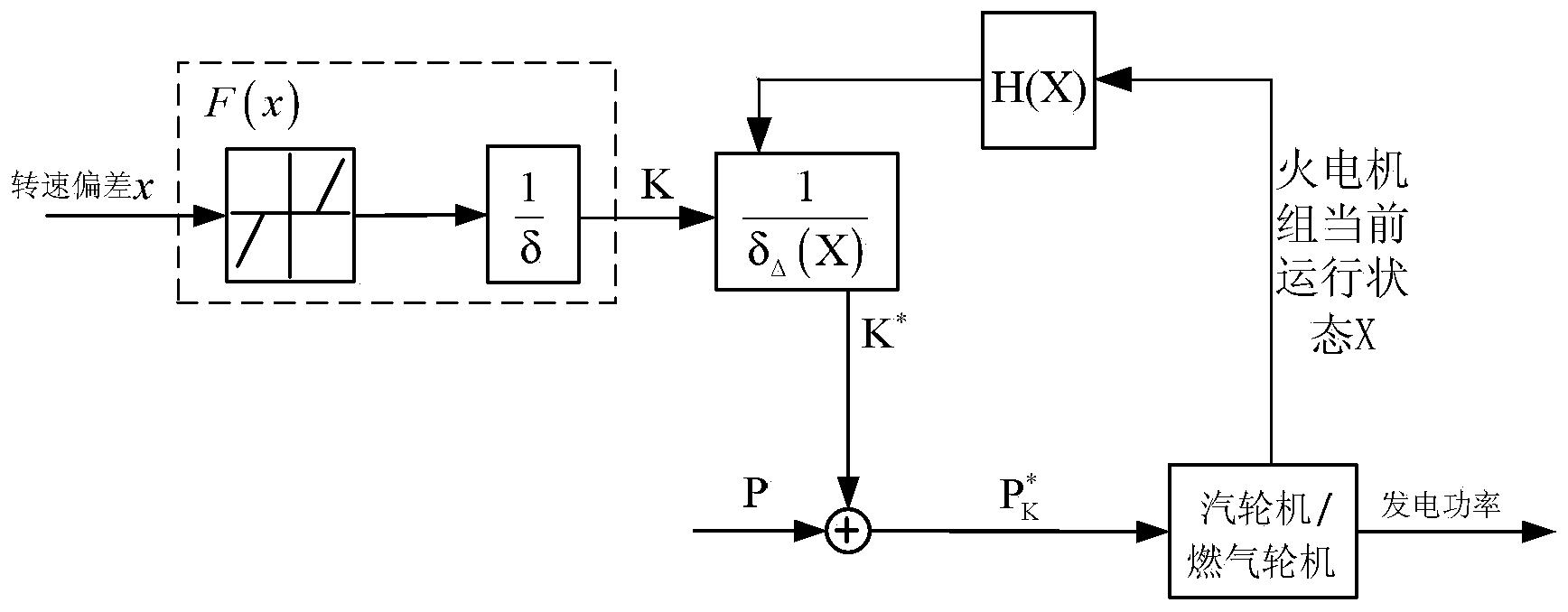
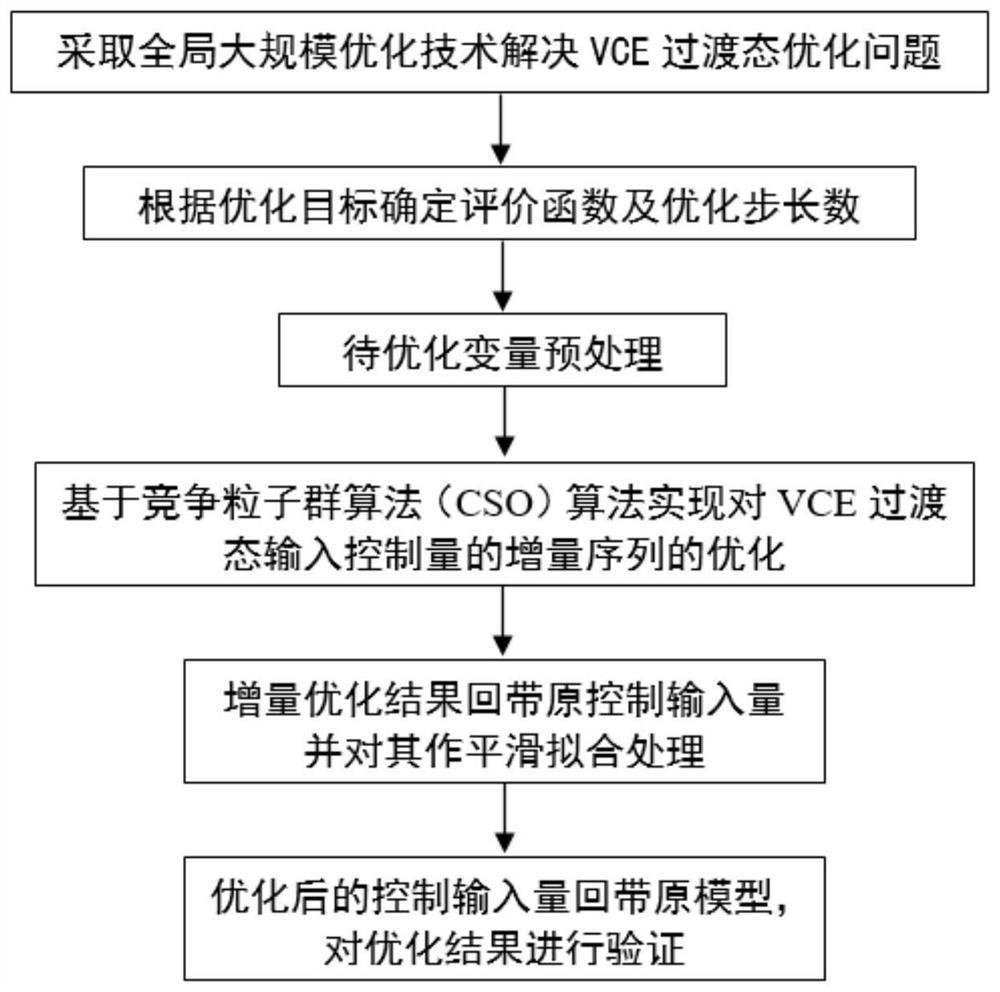
图2为机载自适应模型;
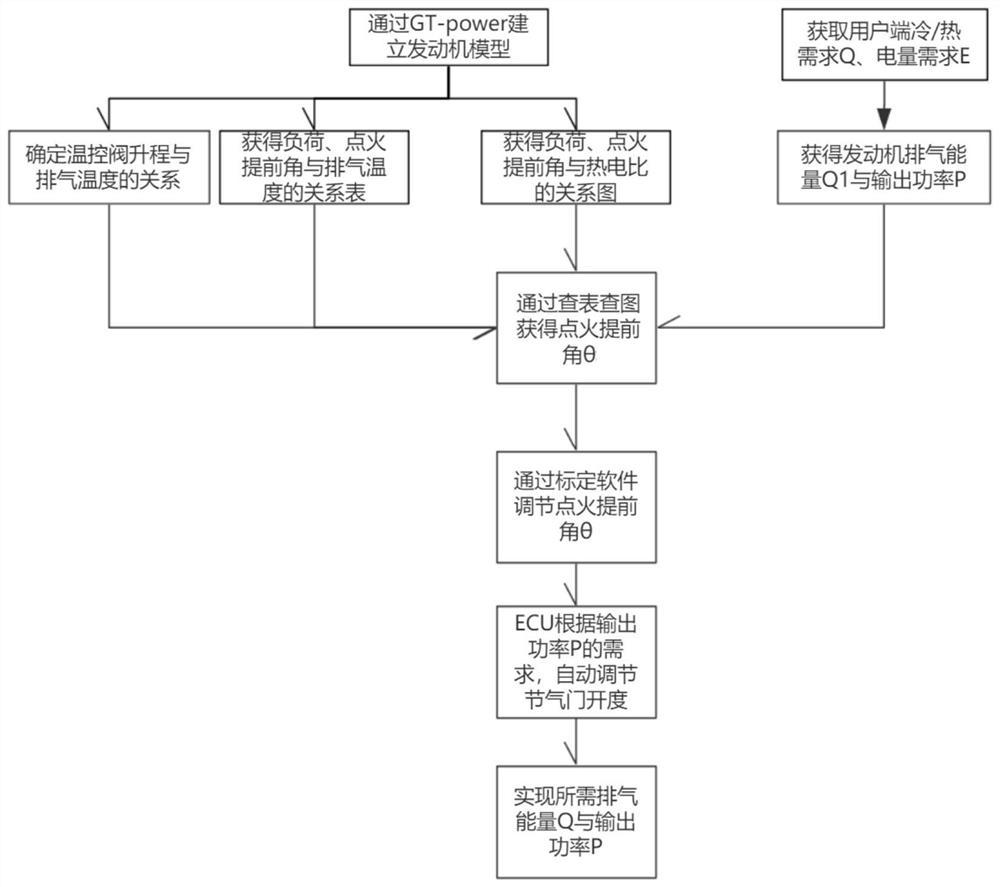
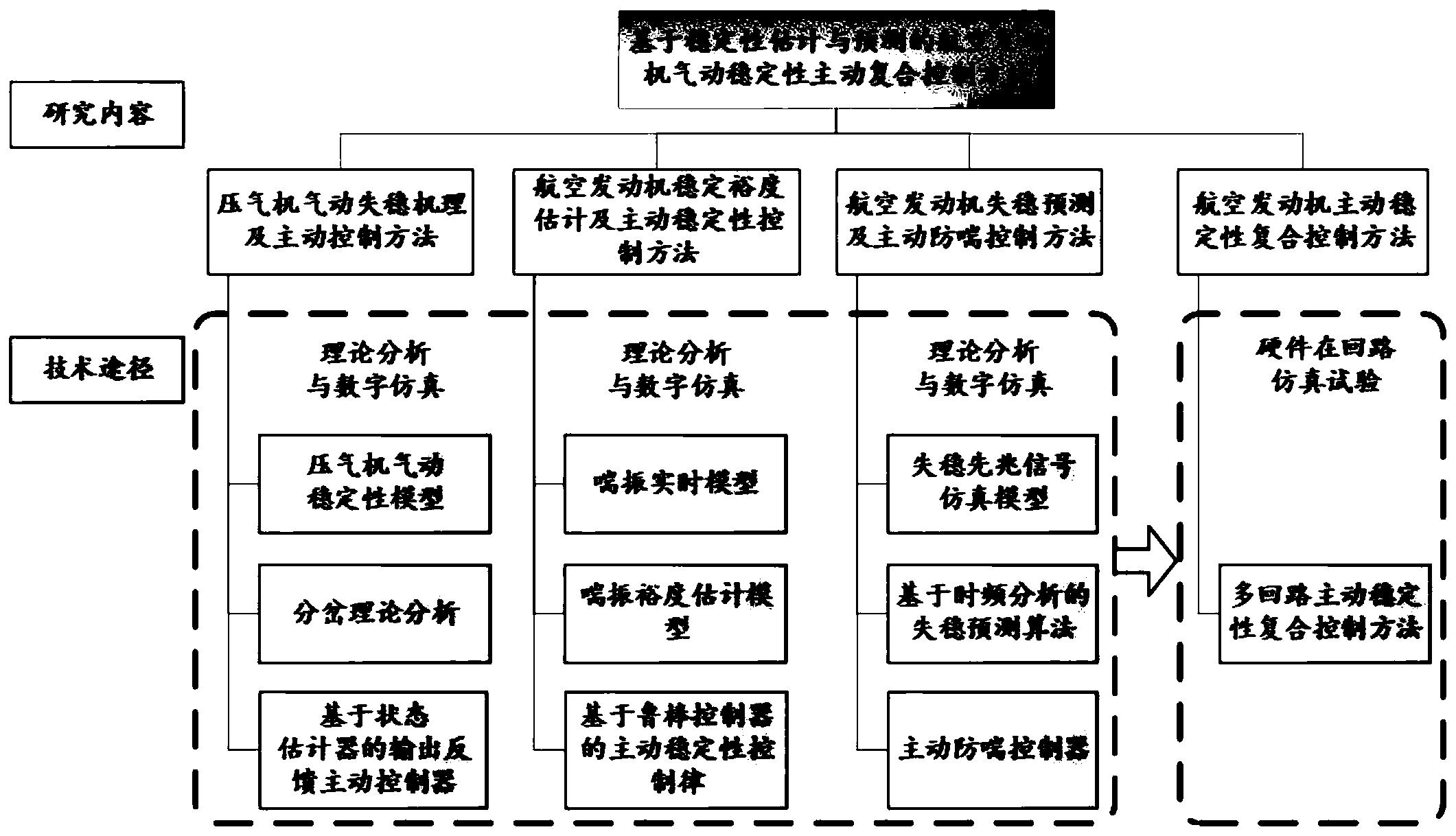
图3为发动机状态变量模型分块图;
图4a~图4k为两种预测控制方法的控制结果对比。
具体实施方式
针对现有技术的不足,本发明的解决思路是利用考虑发动机退化量的复合预测模型来对发动机推力进行非线性预测模型控制,以提升控制实时性。具体而言,本发明所提出的基于复合模型预测控制的航空发动机直接推力控制方法,利用非线性预测模型控制方法对发动机推力进行直接控制;所述非线性预测模型控制方法中所使用的预测模型为基于发动机状态变量模型、卡尔曼滤波器、发动机非线性模型所建立的复合预测模型,所述卡尔曼滤波器利用发动机测量参数值和发动机非线性模型计算值之差计算得到发动机退化量并将其反馈到发动机非线性模型,发动机非线性模型计算出发动机不可测参数并将其与发动机退化量一起反馈至发动机状态变量模型,发动机状态变量模型通过实时滚动优化求出预测控制量。
为便于公众理解,下面通过一个具体实施例并结合附图来对本发明的技术方案进行详细说明:
本发明航空发动机直接推力控制方法的控制原理如图1所示。图中u为发动机控制变量,Δη为发动机部件退化量,w和v分别是过程噪声和测量噪声。从图1中可以看出,发动机机载复合预测模型主要由发动机非线性模型、卡尔曼滤波器和状态变量模型(SVM,StateVariable Model)组成,本实施例中的发动机非线性模型采用发动机部件级模型。首先通过离线线性化,获得全包线状态变量模型;然后卡尔曼滤波器利用发动机测量的参数值和部件级模型计算值之差计算得到发动机退化量,退化量反馈到发动机部件级模型,使得部件级模型实时跟踪到发动机健康参数;最后预测控制根据状态变量模型SVM和部件级模型算得的不可测参数(如推力、喘振裕度和涡轮前温度),利用有效集方法和罚函数法,实时滚动优化求出预测控制量。该方法在控制量求解过程中只需计算一次部件级模型,其实时性得到显著提高。
预测模型是预测控制的一个重要组成部分,它的功能主要是根据系统历史信息和未来控制量输入,实时预测系统的未来状态,其中预测精度和实时性是其重要的评价指标,如前所述预测主要由部件级模型、卡尔曼滤波器和状态变量模型(SVM,State VariableModel)组成,其中的部件级模型可以采用现有的各种航空发动机部级模型,在此不再阐述。因而以下主要介绍状态变量模型的建立和求解,如何建立全包线线化模型,以及卡尔曼滤波器的设计和求解。预测模型具体如下:
设航空发动机的非线性动态模型的表达式如下:
式中,u∈R
令Δu=u-u0,Δx=x-x0,Δy=y-y0=g(x,u)-g(x0,u0), 则上式可以简化为:
在发动机控制中,涡轮前温度和喘振裕度等限制主要保证发动机能够安全稳定工作,但其往往不可测,因此,为了对发动机进行直接推力控制,把喘振裕度、涡轮前温度和安装推力作为状态变量,即x=[Smf,Smc,Fin,cor,T4cor]
在发动机实际运行中,由于部件磨损、老化、安装公差和环境噪声等情况的存在,发动机工作会偏离额定工作状态,因此,为了能使得状态变量模型能真实描述发动机状态,在建立状态变量模型中将部件退化量Δη和环境噪声考虑进去,因而有:
式中, 为部件退化量, 和 分别为风扇流量退化量、压气机流量退化量、高压涡轮效率退化量和低压涡轮效率退化量。ω和υ分别为系统噪声和测量噪声。
式(4)建立了考虑发动机退化和噪声的航空发动机状态变量模型,将退化参数作为控制参数,由于退化参数不可测量,因而将其增广到状态变量中,得到如下增广变量模型:
本文采用的卡尔曼滤波器如图2所示,卡尔曼滤波器估计出退化量,其表达式如下:
Δyreal为测量的真实值,ΔyCLM为部件级模型算出的值,K=P[C M]
从中可以看出,首先通过卡尔曼滤波器估计出发动机健康参数,然后发动机部级模型根据健康参数和控制输入实时改变预测值yCLM,该值和测量值之差Δyreal-ΔyCLM反馈到卡尔曼滤波器,提高健康参数的估计精度。
为了使得模型能适应全包线,如若在不同高度和马赫数进行线性化,则必然增加数据存储量,因而,本文使用相似变换原理,相似原理的首要条件是要保证两个被研究系统对应的几何尺寸比值相等,即满足几何相似,本文研究的发动机可变几何部件主要包括进气道、凤扇和压气机导叶角、尾喷管面积等,同时,除了需要满足几何相似外,还需保证同名准则相同
由压气机和涡轮共同工作方程可知,当尾喷管喉道面积A8一定时,且气流处于临界或者超临界状态时,共同工作线只有一条,只要给定某个工作参数,如P3cor、P4cor或Nc,cor确定时,则共同工作点就可确定,本项目采用进气道斜板角度保持不变,因而相似工作条件为P3cor=const,Ma=const;同时保证几何相似αf=const,αc=const,A8=const。
安装推力与Ma关系特别大,因而不对马赫数准则进行简化,因此,如图3所示,以上相似条件为:
Ma=const,P3cor=const,A8=const (8)
在第k步时,输入未来Nu步控制变量u(k),u(k+1),…,u(k+Nu-1),通过线化模型式(3),可以预测输入未来Np步的状态变量的输出,为了叙述方便,状态变量矩阵中的Δ省略,得到:
式中,Nu为控制时域,Np为控制时域,上式可以整理为:
X(k)=Fxx(k)+GxU(k) (10)
式中:
同理可得未来Np步的发动机的响应:
Y(k)=Fyx(k)+GyU(k) (15)
式中:
为了使得非线性模型预测控制能够实时跟踪上油门指令,建立如下目标函数:
式中,r为发动机控制指令:
r=[Fc,cor,Epr]
为预测模型对指令变量的估计值,Δu为发动机控制量的前后时刻之差,即Δu(k+i)=u(k+i)-u(k+i-1),目标函数第一项是得到能快速跟踪到指令值,目标函数第二项是保证发动机跟踪到指令之后,控制量尽可能地稳定不变,Q和R为半正定矩阵,其作用类似于LQR算法中的Q和R矩阵,Q越大,意味着目标函数第一项权重越大,则发动机越快地跟踪到目标函数,而相对而言,目标函数第二项权重变小,也就说发动机跟踪到指令之后控制量有可能有波动,而当Q变小,其响应速度将会受到影响。
当发动机在加速且处于低中转子转速时,由于风扇和压气机增压比的增加速度大于流量增加的速度,此时两部件工作接近喘振限制边界。随着转速的提高,发动机转速的惯性大于温度增加的惯性,所以高压涡轮温度先到达限制值,随后,转子转速也到达限制值。为了保证发动机安全稳定运行,这些约束必须满足:
式中,Wfb为主燃油流量,A8为尾喷管喉道面积,αf为风扇导叶角角度,αc为风扇导叶角角度,Nf为风扇相对换算转速,Nc为压气机相对换算转速,Smf为风扇喘振裕度,Smc为压气机喘振裕度,T41为涡轮进口温度。后四项为油泵、喷管作动筒等执行机构的机械限制,从上式可以看出,发动机在运行中,是通过控制风扇压气机转子换算转速、喘振振裕度、压气机出口总压和低压涡轮出口总温来保证发动机安全稳定运行。其中风扇和压气机转子换算转速限制、高压涡轮进口温度限制值都是是关于风扇进口总温相关,另外两个限制值(风扇和压气机的喘振振裕度)设置为常值。
为了验证本发明所提出直接推力控制方法的有效性,在此仅与目前流行的基于扩展卡尔曼的预测控制作比较,以验证该方法实时性高的特点。
加速过程是一个复杂的发动机瞬态过程,同时也是其它瞬态过程的研究基础。因而仿真实验选为在地面H=0km、Ma=0、标准大气压的加速仿真,加速过程的限制约束如表1,其中MIR为对执行机构单位时间内最大变化率限制。
表1瞬态控制的参数约束
本文与目前流行的基于扩展卡尔曼的预测控制作比较。比较结果如图4a~图4k所示,图中的安装推力Fin经过归一化处理,“基复合预测模型的NMPC”为本发明提出的控制方案,“基于EKF的NMPC”为现有基于扩展卡尔曼的非线性预测控制方案。两组程序的运行环境为Windows 7Ultimate with Service Pack 1(x64)的操作系统,CPU为主频为3.30GHz的Intel(R)Core(TM)i5-4590,内存为8G,具体运行软件为MATLAB2016b。
从图4(a)中可以看出,基于EKF的NMPC直接推力控制每步优化的耗时基本大于40毫秒,而本文提出的非线性预测控制每步优化的耗时基本小于1毫秒,少部分大于1毫秒,但小于25毫秒。如图4(b)所示,两种方法的安装推力的响应时间基本一致,从4(l)可以看出,加速沿着喘振限制边界,而且加速过程不超温(4(j))、不超转(4(h)、4(i))和不进喘(4(k)、(4(l))。因此本发明提出的方法可以使得发动机在满足限制约束的情况下,使得发动机与传统预测控制具有相同的推力响应速度,而且优化实时性远好于传统预测控制。
基于复合模型预测控制的航空发动机直接推力控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0