








专利摘要
本发明涉及齿轮齿条爬升式升船机安全机构螺纹副间隙调节方法及装置,通过设计具有检测和调节的闭环控制系统,用于检测和调节安全机构螺纹副间隙,该控制系统包括螺纹副间隙监测装置、控制系统和调节系统,其中,所述监测装置用于监测螺纹副间隙;所述控制系统根据监测装置反馈的间隙数据启动调节系统;所述调节系统在不改变原有锥齿轮配合输入输出的基础上,增加蜗轮蜗杆差动调节装置以及附加转动装置以对原有输出进行调节。当间隙值超出允许范围时,附加转动装置接收到所述毫米级激光测距传感器传来的信号,调控所述蜗轮蜗杆差动装置,控制输出转速,进而调节所述安全机构中螺杆螺母柱配合位置的间隙,使间隙变回允许范围内。
权利要求
1.一种齿轮齿条爬升式升船机安全机构螺纹副间隙调节方法,其特征在于:
设计具有检测和调节的闭环控制系统,用于检测和调节安全机构螺纹副间隙,该控制系统包括螺纹副间隙监测装置、控制系统和调节系统;
所述监测装置用于监测螺纹副间隙;
所述控制系统根据监测装置反馈的间隙数据启动调节系统;
所述调节系统在不改变原有锥齿轮配合输入输出的基础上,增加附加转动传动装置以对原有输出进行调节;
实现以上方法的装置包括毫米级激光测距传感器(4)、控制模块、附加转动装置(1)和蜗轮蜗杆差动装置(2),
所述毫米级激光测距传感器(4)设置在安全机构的螺母柱上,用于监测螺纹副间隙;
所述控制模块用于接收螺纹副间隙信号,并启动附加转动装置;
所述附加转动装置(1)设置在原锥齿轮箱体外部,包括由控制模块控制的伺服电机,所述伺服电机输出轴上连接有行星齿轮减速器;
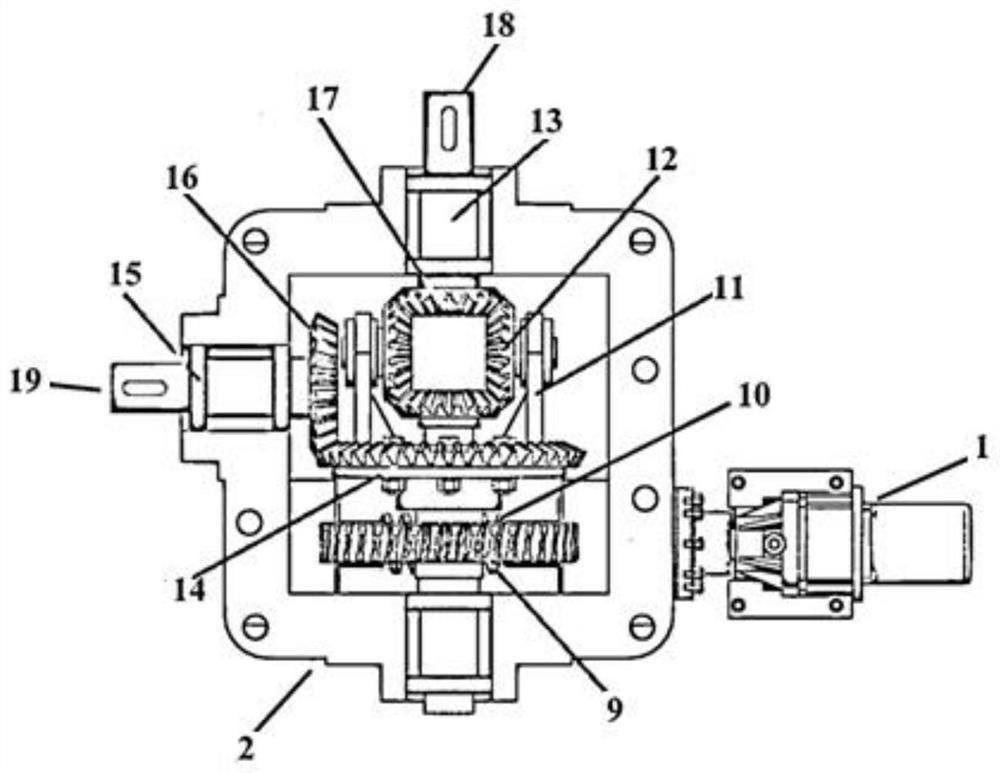
所述蜗轮蜗杆差动装置(2)设置在齿轮箱内部,包括行星架(11)及其上安装的第一锥齿轮(12)和第二锥齿轮(14),所述第一锥齿轮与输入轴(18)上的第三锥齿轮(17)配合,所述第二锥齿轮(14)与输出轴(19)上的第四锥齿轮(16)配合,所述第二锥齿轮(14)同轴安装有蜗轮(9),所述蜗轮(9)配合的蜗杆(10)通过联轴器与伺服电机输出轴连接。
2.根据权利要求1所述的齿轮齿条爬升式升船机安全机构螺纹副间隙调节方法,其特征在于:所述监测装置为毫米级激光传感器。
3.根据权利要求2所述的齿轮齿条爬升式升船机安全机构螺纹副间隙调节方法,其特征在于:所述毫米级激光传感器为YF-JS40型。
说明书
技术领域
本发明涉及升船机运行安全设备领域,尤其涉及一种齿轮齿条爬升式升船机安全机构 螺纹副间隙调节方法及装置。
背景技术
安全机构螺杆与螺母柱间的螺纹副间隙是齿轮齿条爬升式升船机的一个十分重要的 参数。理想的间隙值大小应适中,过大将造成安全机构和驱动机构设备规模的无谓加大, 过小则将影响升船机的正常运行。但是在工程中,由于传动系统的制造误差、塔柱及船厢 的变位、设备的制造安装误差等因素的影响,螺纹副的间隙将在船厢升降过程中随机变化。 现有技术通过传统的经验试运行方法,验证了在升船机正常运行工况下间隙大小的变化能 够满足工程需求。不足之处在于经验试运行技术并非一种真正的可调控技术,而更偏向于 传统经验设计,无法调控因为各类突发状况带来的间隙突变,难以从根本上保障升船机安 全运行。
发明内容
本发明的目的是提供一种齿轮齿条爬升式升船机安全机构螺杆与螺母柱间螺纹副间 隙调节方法及装置,无论在正常运行工况或突发故障工况,都能够使升船机安全机构螺纹 副的间隙保证在安全范围内,保障升船机的正常运行。
本发明所设计的齿轮齿条爬升式升船机安全机构螺纹副间隙调节方法,其特殊之处在 于:
设计具有检测和调节的闭环控制系统,用于检测和调节安全机构螺纹副间隙,该控制 系统包括螺纹副间隙监测装置、控制系统和调节系统,
所述监测装置用于监测螺纹副间隙;
所述控制系统根据监测装置反馈的间隙数据启动调节系统;
所述调节系统在不改变原有锥齿轮配合输入输出的基础上,增加附加转动传动装置以 对原有输出进行调节。具体为蜗轮蜗杆差动装置和带动蜗轮蜗杆差动装置的附加传动装置。
进一步地,所述监测装置为毫米级激光传感器。优选地,所述毫米级激光传感器为YF-JS40型,其线性量程为50-90mm,分辨率为10μm。
本发明还设计了一种用于实现齿轮齿条爬升式升船机安全机构螺纹副间隙调节方法 的装置,其特殊之处在于:包括毫米级激光测距传感器、控制模块、附加转动装置和蜗轮 蜗杆差动装置,
所述毫米级激光测距传感器设置在安全机构的螺母柱上,用于监测螺纹副间隙;
所述控制模块用于接收螺纹副间隙信号,并启动附加转动装置;
所述附加转动装置设置在原锥齿轮箱体外部,包括由控制模块控制的伺服电机,所述 伺服电机输出轴上连接有行星齿轮减速器;
所述蜗轮蜗杆差动装置设置在齿轮箱内部,包括行星架及其上安装的第一锥齿轮和第 二锥齿轮,所述第一锥齿轮与输入轴上的第三锥齿轮配合,所述第二锥齿轮与输出轴上的 第四锥齿轮配合,所述第二锥齿轮同轴安装有蜗轮,所述蜗轮配合的蜗杆通过联轴器与伺 服电机输出轴连接。
本发明的优点在于:
当间隙值在允许范围内时,附加转动装置不工作,蜗轮蜗杆差动装置与升船机原锥齿 轮传动装置一样正常传递主减速器输出轴的转速;当间隙值超出允许范围时,附加转动装 置接收到所述毫米级激光测距传感器传来的信号,调控所述蜗轮蜗杆差动装置的输出转速, 进而调节所述安全机构中螺杆螺母柱配合位置的间隙,使间隙变回允许范围内。
1、从安装上讲,本发明安装方便,只需安装在升船机原锥齿轮箱对应位置,无需改变原升船机结构。
2、从功能上讲,本发明可实现该间隙值的实时监测和自动调节,若间隙值超出允许 范围,则附加转动装置与蜗轮蜗杆差动装置快速做出反应,使间隙值恢复到允许范围内。
3、从使用效果上讲,本发明可以保证在船厢全行程内,该间隙均保持适当的余量,以确保在升船机正常运行工况下,安全机构螺杆与螺母柱之间螺纹副的上、下螺纹面均不接触。
4、通过将毫米级激光传感器安装在在安全机构中螺母柱上能够实时监测升船机安全 机构锁定螺杆与螺母柱之间间隙,进而对间隙值进行分析,当间隙值在允许范围内时,附 加转动装置不工作,蜗轮蜗杆差动装置正常运作;当间隙值超出允许范围时,附加转动装 置接收到所述毫米级激光测距传感器传来的信号,输入附加转动,调控所述蜗轮蜗杆差动 装置的输出转速,进而调节所述安全机构中螺杆螺母柱配合位置的间隙,使间隙变回允许 范围内。
附图说明
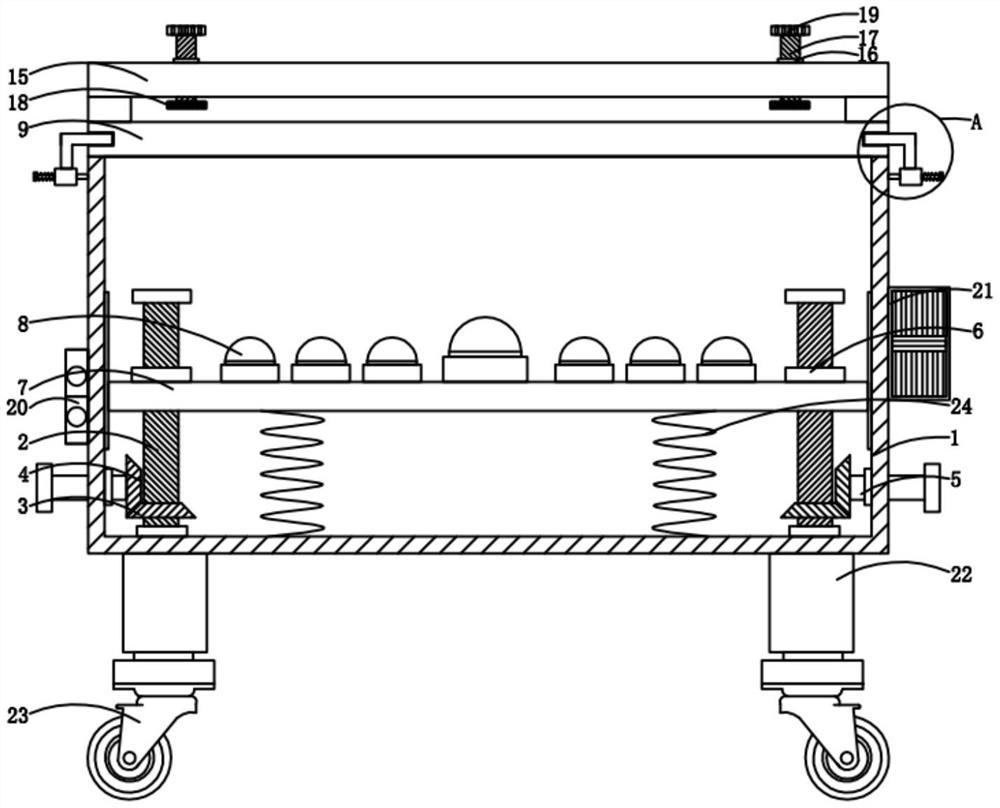
图1为本发明调节方法自动控制原理图;
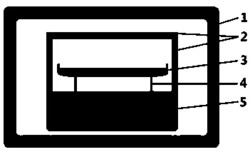
图2为本发明控制目标—安全机构螺杆与安全机构螺母柱之间间隙平面结构图;
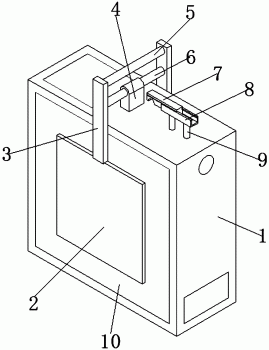
图3为本发明中蜗轮蜗杆差动装置组成以及蜗轮蜗杆差动装置与附加转动装置位置示 意图。
图中:附加转动装置1,蜗轮蜗杆差动装置2,安全机构螺杆3,安全机构螺杆3.1,安全机构螺母柱3.2,毫米级激光测距传感器4,伺服电机5,联轴器6,蜗轮蜗杆差动装 置箱体7,单级行星齿轮减速器8,蜗轮9,蜗杆10,行星架11,锥齿轮12,套筒13,锥 齿轮14,轴承15,锥齿轮16,锥齿轮17,输入轴18,输出轴19,L1和L2为螺纹副间隙。
具体实施方式
下面结合附图对本发明的实施方式做进一步的说明。
本发明所设计的一种齿轮齿条爬升式升船机安全机构螺纹副间隙调节方法,具体过程 如下:
设计具有检测和调节的闭环控制系统,用于检测和调节安全机构螺纹副间隙,该控制 系统包括螺纹副间隙监测装置、控制系统和调节系统,
所述监测装置用于监测螺纹副间隙;
所述控制系统根据监测装置反馈的间隙数据启动调节系统;
所述调节系统在不改变原有锥齿轮配合输入输出的基础上,增加蜗轮蜗杆差动装置与 附加转动传动装置以对原有输出进行调节。
如图1所示,用于实现升船机安全机构螺母柱螺纹副间隙调节方法的装置,它包括附 加转动装置1、蜗轮蜗杆差动装置2、安全机构螺杆3、毫米级激光测距传感器4。当所述安全机构螺杆3与安全机构螺母柱间隙超过允许值时,所述毫米级激光测距传感器4发出信号,控制所述附加转动装置1产生附加转动,附加转动调控所述蜗轮蜗杆差动装置2的 输出转速,进而控制所述安全机构螺杆3与安全机构螺母柱间隙恢复到允许范围内。
进一步的,所述毫米级激光传感器4选用YF-JS40型,其线性量程为50-90mm,分辨率为10μm。而设计确定的间隙值为±60mm,所述毫米级激光传感器能够满足量程要求, 能够精确测量间隙值。
进一步的,通过将所述毫米级激光传感器4安装在在安全机构螺杆3中螺母柱上能够 实时监测升船机安全机构锁定螺杆与螺母柱之间间隙,进而对间隙值进行分析。当间隙值 在允许范围内时,所述毫米级激光传感器4不发出信号;当间隙值超出允许范围时,所述毫米级激光传感器4发出信号,控制附加转动装置1产生附加运动。
其中,所述蜗轮蜗杆差动装置2安装在升船机原锥齿轮箱对应位置,替代原锥齿轮传 动,所述蜗轮蜗杆差动装置2由输入轴18及其上组件、输出轴19及其上组件、行星架11及其上组件、蜗轮9及蜗杆10主体构成;输入轴18通过其上安装的套筒13固定在齿轮 箱体上,输入轴18上安装有锥齿轮17,完成动力由主传动系统向所述蜗轮蜗杆差动装置 2的输入;行星架11上安装锥齿轮12、锥齿轮14,其中锥齿轮12与输入轴18上锥齿轮 17啮合,锥齿轮14与输出轴19上锥齿轮16啮合,完成输入轴18至输出轴19的动力传 递;蜗轮9与锥齿轮14同轴安装,蜗杆10与附加转动装置1连接,蜗轮蜗杆负责传递附 加转速;输出轴19上安装有轴承15与锥齿轮16,通过锥齿轮16与锥齿轮14的啮合将动 力输出至安全机构螺杆。
进一步的,附加转动装置1安装在原锥齿轮箱外部,附加转动装置1由伺服电机5、联轴器6以及单级行星齿轮减速器8组成,蜗杆10通过联轴器6与伺服电机5的输出轴 连接,伺服电机5由控制模块激发,控制模块通过接收毫米级激光测距传感器4信号判断 齿轮副间隙是否需要调整,从而激发附加转动伺服电机5通过单级行星齿轮减速器8调速 后经由联轴器6将动力传递至蜗轮蜗杆差动装置2中的蜗杆10,然后通过蜗轮蜗杆传动传 递给蜗轮9,蜗轮9通过同轴转动将动力传递至行星架11上的锥齿轮14,锥齿轮14通过 啮合传动将附加运动传递至锥齿轮16,从而调整输出轴19的输出至安全机构螺杆的转速。
蜗轮蜗杆装置与附加运动装置的具体实施过程如下:
升船机安全机构螺杆3.1与安全机构螺母柱3.2位置示意图如图2,蜗轮蜗杆差动装置 2与所述附加转动装置1位置示意图如图3所示,以三峡升船机为例,正常升降时,图2中L1和L2垂直方向距离均为60mm,当螺杆在垂直方向有波动时,两个距离此消彼长,其 和120mm保持不变,设其有一个安全阈值s,当所述毫米级激光测距传感器4监测到 (60-s)mm<L1<(60+s)mm时,所述附加转动装置1此时不工作,主减速器输出 轴的转速经过输入轴18及其上的锥齿轮17,传递至行星架11上的锥齿轮14,然后通过锥 齿轮啮合传递至输出轴19上的锥齿轮16,直接输出到安全机构螺杆3。当所述毫米级激 光测距传感器4监测到L1>(60+s)mm或L1<(60-s)mm时,此时附加转动装置1开始 工作,伺服电机5启动,通过单级行星齿轮减速器8,联轴器6,控制附加转速的大小以 及转向并传递至蜗轮蜗杆差动装置1中的蜗杆10,通过蜗轮蜗杆传动带动蜗轮9转动,蜗 轮9通过同轴传动带动锥齿轮14,锥齿轮14与输出轴19上的锥齿轮16啮合,从而阻碍 或促进输出动力的锥齿轮16的转动,从而调节输出轴19的转速,蜗轮蜗杆差动装置输出 轴19的转速经一对锥齿轮换向后传递给安全机构螺杆3,从而实现控制安全机构螺杆3的 转速,最终通过安全机构3相对于安全机构螺母柱转速的控制实现间隙的控制,避免螺杆 与螺母柱之间发生碰撞。
结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式。技 术人员均可在不违背本发明的创新点及操作步骤,在权利要求保护范围内,对上述实施例 进行修改。本发明的保护范围,应如本发明的权利要求书覆盖。
齿轮齿条爬升式升船机安全机构螺纹副间隙调节方法及装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0