







专利摘要
本发明涉及一种摄像头模块,其包括:整合的用于在摄像头模块的壳体内旋转摄像头模块的透镜单元的马达。壳体包括用作马达的定子的多个电磁芯。透镜单元包括多个铁氧体元件并用作马达的转子。透镜单元在壳体中的旋转带来对焦调整,这样使得马达能够用作自动对焦系统的部件。用于装配摄像头的方法也得以公开。
权利要求
1、一种摄像头模块,其包括:
图像捕获装置;
透镜单元;
壳体,其适用于容纳所述透镜单元并用以相对于所述图像捕获装置定位所述透镜单元;
电动马达,所述壳体形成所述电动马达的第一部分,并且所述透镜单元形成所述电动马达的第二部分,当所述电动马达被通电时所述透镜单元在所述壳体内旋转;和
调节机构,所述透镜单元的旋转改变所述透镜单元相对于所述图像捕获装置的位置。
2、如权利要求1所述的摄像头模块,其中:
所述电动马达是步进马达;
所述马达的所述第一部分是所述步进马达的定子;并且
所述马达的所述第二部分是所述步进马达的转子。
3、如权利要求2所述的摄像头模块,其中,所述调节机构包括:
形成在所述壳体上的多个坡道;和
形成在所述透镜单元上的多个互补坡道。
4、如权利要求1所述的摄像头模块,其中,所述透镜单元包括:
总体圆柱形的主体;和
固定至所述圆柱形的主体的多个铁氧体元件。
5、如权利要求4所述的摄像头模块,其中,所述壳体包括多个电绕组,所述多个电绕组当其被通电时电磁地吸附所述铁氧体元件。
6、如权利要求1所述的摄像头,其中:
所述透镜单元包括总体圆柱形的主体和圆环;
所述调节机构包括所述圆环和所述壳体的一部分;和
所述透镜单元包括在所述圆环的另一部分和所述圆柱形的主体之间的第二调节机构。
7、如权利要求6所述的摄像头模块,其中,所述透镜单元包括绕所述圆柱形的主体的外周布置的多个铁氧体元件。
8、一种摄像头对焦马达,其包括:
与所述摄像头的壳体整体形成的定子;
与所述摄像头的透镜单元整体形成的转子。
9、如权利要求8所述的摄像头对焦马达,其中,所述转子包括镜筒,该镜筒具有嵌入在其中的铁氧体元件。
10、如权利要求8所述的摄像头对焦马达,其中,所述定子包括安装在所述壳体中的多个电磁线圈。
11、如权利要求10所述的摄像头对焦马达,其中,所述多个电磁线圈围绕所述透镜单元。
12、如权利要求10所述的摄像头对焦马达,其中,还包括控制电路,该控制电路用以有选择地给所述电磁线圈通电以控制所述转子相对于所述定子的旋转运动。
13、如权利要求12所述的摄像头对焦马达,其中,所述控制电路的至少一部分包括在整合的图像捕获装置中。
14、如权利要求8所述的摄像头对焦马达,其中,所述马达是步进马达。
15、一种用于装配摄像头模块的方法,所述方法包括:
提供包括马达的第一部分的壳体;
提供包括马达的第二部分的透镜单元;及
相对于所述壳体定位所述透镜单元以使得所述马达的所述第一部分与所述马达的所述第二部分接合。
16、如权利要求15所述的方法,其中,提供包括马达的第一部分的壳体的步骤包括:提供所述壳体,而多个电磁线圈固定至所述壳体上。
17、如权利要求15所述的方法,其中,提供包括马达的第二部分的透镜单元的步骤包括提供所述透镜单元,而多个铁氧体元件固定至所述透镜单元上。
18、如权利要求15所述的方法,其中,提供包括马达的第一部分的壳体的步骤包括在所述壳体内构建所述马达的定子。
19、如权利要求15所述的方法,其中,提供包括马达的第二部分的透镜单元的步骤包括在所述透镜单元内构建所述马达的转子。
20、如权利要求15所述的方法,其中,所述马达是步进马达。
说明书
技术领域技术领域
本发明总的涉及电子设置,更具体地说,涉及数字摄像头模块。更加具体地说,本发明涉及用于经由整合在其中的步进马达而聚焦数字摄像头模块的系统。
技术背景背景技术
数字摄像头模块当前被整合进入多种电子装置。这样的摄像头植入装置包括但不局限于:蜂窝电话;个人数字助理(PDA);和计算机。对于数字摄像头模块的需求随整合摄像头模块进入植入装置的能力的扩展而增长。由此,数字摄像头模块的一个设计目标是使得它们尽可能的小以使它们将会适配进入电子装置,而大体上不会增加装置的整体尺寸。此外,也希望尽可能高效并健壮地制造出数字摄像头模块。另外希望制造出的数字摄像头模块要求最少的用户知识和努力用以操作。实现这些设计目标的方法应加强或者至少保持由摄像头模块所捕获的图像的质量。
一般地,摄像头模块包括:多个用于对焦在多种距离处的图像的对焦模式。例如,已知摄像头模块包括:用于对焦在不同距离处的物体的图像的模式。从一个模式改变至另一模式要求在摄像头模块内的透镜和图像捕获装置之间的移位的改变。这种移位的改变通过对本领域技术人员已知的许多不同机构易于进行。例如,许多先前技术的摄像头包括加工有螺纹的透镜壳体,其螺旋进入和旋出图像捕获装置壳体,由此改变透镜和图像捕获装置之间的距离。其它通常已知的对焦装置包括:凸轮机构,用以相对于图像捕获装置移动透镜。
在微型摄像头模块中,先前对焦方法典型地由手工完成,因为尺寸局限而无法使用驱动马达、凸轮、齿轮等等。另外,先前技术的装置包括其它的缺点。例如,一些先前技术的摄像头模块仅具有两个对焦模式,微距和长焦。因此,图像质量在中间的范围内被牺牲。另一个缺点在于用户必须确认摄像头处于正确的对焦模式和/或切换对焦模式,这是不方便的。极小尺寸的一些摄像头模块使得手动对焦调节更为困难。
因此,所需要的是提供了许多对焦模式和/或连续对焦调节的摄像头。另外需要的是要求最少用户努力和知识用以操作的摄像头模块。另外需要的是能够自动地对焦的摄像头模块。另外需要的是提供了对焦伸缩性,同时保持了相对小的尺寸的摄像头模块。
发明内容发明内容
本发明通过提供用于整合驱动马达进入摄像头模块的方法而解决了先前技术的问题。驱动马达适用于使用在更为极其小的摄像头模块中,因为摄像头模块的部件另外用作马达的部件。
在一个实施例中,摄像头模块包括:图像捕获装置;透镜单元;壳体;电动马达;和调节(例如,对焦、缩放等)机构。壳体用于容纳透镜单元并用以相对于图像捕获装置定位透镜单元。壳体形成电动马达的第一部分,并且透镜单元形成电动马达的第二部分。当电动马达被通电时,透镜单元在壳体内旋转。
在特定的实施例中,马达是步进马达。由壳体形成的马达的部分是步进马达的定子,并且由透镜单元形成的马达的部分是步进马达的转子。透镜单元包括:通常的圆柱形的主体,其带有固定至圆柱形的主体的多个铁氧体元件。壳体包括:多个电绕组,其在通电时电磁地吸引铁氧体元件。
实例调节机构包括:形成在壳体上的多个坡道;和形成在透镜单元上的多个互补坡道。当透镜单元在壳体内旋转时,调节机构改变透镜单元相对于图像捕获装置的位置。可选地,互补坡道形成在透镜单元的圆环上,并且透镜单元包括在圆环的另一部分和透镜单元的圆柱形的主体之间的第二调节机构。第一调节机构(在环和壳体之间)使得易于由马达对焦。第二调节机构(在透镜单元的环和圆柱形的主体之间)使得易于工厂对焦操作。
依据本发明的另一个方面,摄像头对焦马达提供用于使用在不同的摄像头和/或摄像头模块中。摄像头对焦马达包括与摄像头的壳体整体形成的定子和与摄像头的透镜单元整体形成的转子。转子包括:透镜单元的镜筒;和嵌入在镜筒中的多个铁氧体元件。定子包括:安装在壳体中的多个电磁线圈。各个线圈布置邻近于镜筒的外周使得多个电磁线圈围绕透镜单元的镜筒。控制电路有选择地通电线圈以控制转子相对于定子的旋转运动。可选地,至少部分控制电路包括在相对于壳体安装的整合的图像捕获装置中。在所示的实例中,马达作用为步进马达。
用于装配摄像头模块的方法也得以公开。方法包括:提供包括马达的第一部分的壳体;提供包括马达的第二部分的壳体;并相对于壳体定位透镜单元以啮合马达的第一部分与马达的第二部分。提供带有马达的第一部分的壳体的步骤包括:提供带有固定到那儿的多个电磁线圈的壳体。由此,马达的定子得以构建在壳体中。提供透镜单元的步骤包括:提供带有固定到那儿的多个铁氧体元件的透镜单元。由此,马达的转子得以构建在透镜单元内。在所公开的实例方法中,所装配的摄像头模块作为步进马达进行操作。
附图说明附图说明
本发明参考附图进行描述,其中相同参考序号标注大体上类似的元件:
图1是摄像头模块的透视图;
图2是图1的摄像头模块的分解透视图;
图3是图1中示出的镜筒的透视横截面视图;
图4是图1中示出的摄像头模块的透视图;
图5是图1中示出的壳体的内部的后视透视图;
图6是图1中示出的摄像头模块的横截面视图;
图7是总结用于装配摄像头模块的方法的流程图;和
图8是总结用于装配摄像头模块的另一种方法的流程图。
具体实施方式具体实施方式
本发明通过提供带有整合于其中的步进马达的摄像头模块而解决了关联于先前技术的问题。在后面的描述中,数个特定细节得以提出(例如,材料选择)以提供对于本发明的透彻理解。但是,本领域技术人员将明白本发明可以偏离这些特定细节得以实例化。在另外的实例中,众所周知的电子实例和部件的细节已经被省略,以不会不必要地模糊本发明。这样的细节能够在对于本领域技术人员通常已知的参考中发现。例如,Acarnley,Paul P的《步进马达:理论与实践指导》(Stepping Motors:A Guide to Theory and Practice)第四版(IEEE控制工程系列,63)提供了关于步进马达的操作的有用的信息。这里依据授权并入参考的整个内容。
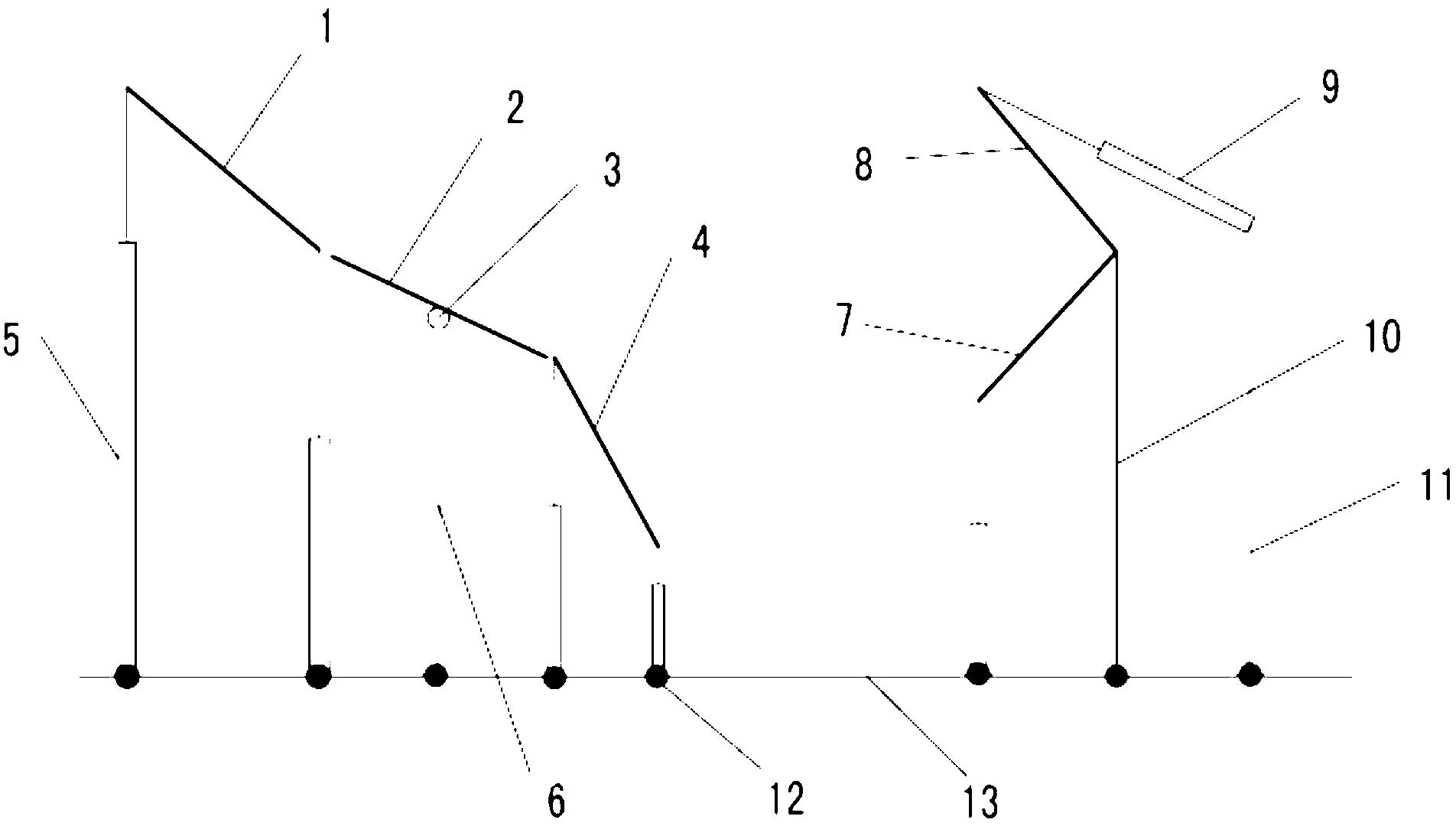
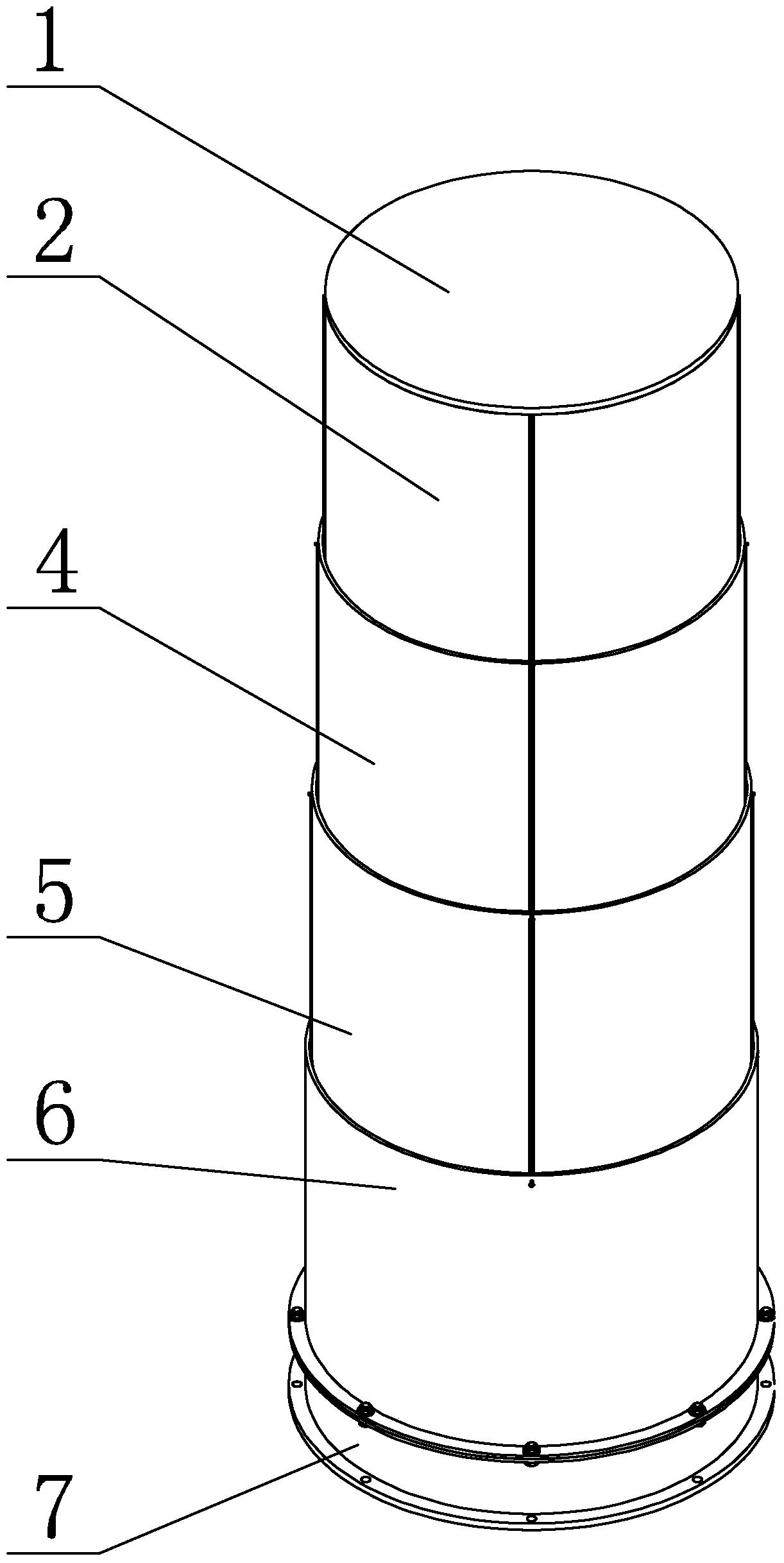
图1示出了所装配的数字摄像头模块100的透视图。在该特定实施例中,摄像头模块100包括:印制电路板(PCB)102、壳体104、致动环106和镜筒108。在该特定实施例中,摄像头模块100另外包括自动对焦特性,其中镜筒108经由电磁地驱动的系统(例如,步进马达)可以相对于PCB 102垂直地位移。
图2示出了沿光轴200分解的摄像头模块100的透视图。如所示的,PCB102包括固定于其上的图像捕获装置202。PCB102另外固定至壳体104的后表面以提供对于致动环106的支撑。在该特定实施例中,致动环106可以绕光轴200旋转。镜筒108包括螺纹外周表面204,其螺旋进入致动环106的互补螺纹内部206。螺纹204和206使得镜筒108适当地相对于致动环106对焦。这种特定的对焦特性典型地在制造过程中得以进行并且典型地仅进行一次。这通常参考为工厂对焦。
自动对焦不同于在摄像头模块100的制造过程中进行的工厂对焦。自动对焦特性使得聚焦场或者由用户或者由对于本领域技术人员已知的自动对焦手段自动地在任意时间改变。自动对焦机制的工作使用了与步进马达相同的原理。在摄像头模块100的中心是镜筒108,其包括嵌入了其周向表面内的铁氧体元件208。筒108作为“转子”。壳体104包括用作为“定子”磁绕组210(电磁线圈)。由于绕组210得以加电(被通电),铁氧体元件208被电磁地吸附至绕组210。结果,致动环106和镜筒108(在工厂对焦期间固定在环106内)沿依赖于哪一个绕组210被加电的方向旋转。由于环106旋转,其滑动地接触壳体104的斜面212,这改变了镜筒108和图像捕获装置202之间的垂直距离。当然,镜筒108和图像捕获装置202之间的垂直距离改变使得易于进行摄像头模块100的对焦。
在该特定的实施例中,步进马达的控制电路包括在图像捕获装置202中。电源电路和电子互连并未示出,以不会不必要地模糊所描述的发明。但是,本领域技术人员应该理解这样的电路将布置在PCB102上并且PCB102和壳体104之间的电子互连将得以提供以将电源布线至绕组210。
图3示出了镜筒108的横截面透视图。在该特定实施例中,镜筒108容纳了透镜组件300。对于本领域技术人员应是清楚的,即透镜组件300的说明(例如,组成、IR滤波器、固定手段等)并不是本发明的必须的方面并且仅示出用以提供对于本发明的更好的理解。
图4是壳体104的顶视透视图。在该特定实施例中,壳体104包括斜面212(坡道),其滑动地啮合致动环106的后表面(互补坡道)。由于镜筒108由铁氧体元件208和绕组210之间的电磁力而得以旋转,斜面212使得易于改变透镜组件300和图像捕获装置202之间的距离。
图5是壳体104的底面透视图。该特定附图说明了绕组210如何被构建在壳体104的内部。
图6是摄像头模块100的横截面视图,其示出了当镜筒108被安装至壳体104时镜筒108和壳体104之间的相对定位。注意各个绕组210每个邻近于镜筒108的外周布置这样使得多个绕组210围绕镜筒108。镜筒108和壳体104实际上形成用以提供对焦调节的电动马达的部分。具体地说,镜筒108形成转子的部分,并且壳体104实际上形成定子的部分。
图7是总结用于装配摄像头模块的一个特定方法700的流程图。在第一步骤702中,镜筒得以提供。下面,在第二步骤704中,致动环得以提供。然后,在第三步骤706中,摄像头模块壳体得以提供。下面,在第四步骤708中,镜筒部分地螺旋进入致动环。然后,在第五步骤710中,致动环放置进入壳体并旋转直到靠紧限位器用于标定。下面,在第六步骤712中,由于致动环保持靠紧限位器,镜筒在致动环内旋转直到对焦得以实现(工厂对焦)。最后,在第七步骤714中,镜筒结合至致动环。
图8是总结装配摄像头模块的另一个特定方法800的流程图。在第一步骤802中,包括马达的第一部分的摄像头模块壳体得以提供。然后,在第二步骤804中,包括马达的第二部分的透镜单元得以提供。下面,在第三步骤806中,透镜单元安装至摄像头壳体以啮合马达的第一部分至马达的第二部分。由此,摄像头模块的装配和马达的装配同时发生。
本发明的特定实施例的描述现在得以完成。许多所描述的特性在不偏离本发明的范围的前提下可以替换、改变或省略。例如,可选的透镜组件可替换透镜组件300。作为另一个实例,可选的调节机构(例如,螺纹、凹槽等)可替换斜面212。本领域中技术人员应清楚明了所示出的特定实施例的这些和其它的变更,特别是考虑到先前的公开。
致动步进式透镜摄像头模块专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。




动态评分
0.0