








专利摘要
本发明公开一种弹载计算机,包括测量模块、处理模块和输出控制模块,测量模块用于测量弹体运行数据,处理模块用于将测量模块测得的弹体运行数据结合得到控制指令,输出控制模块将从处理模块得到的控制指令信号放大输出至舵机。该弹载计算机体积小,线路连接简易,成本低,使用便利,可靠性高,可重复使用适于各种末制导炮弹系列上应用,其控制效果良好,工程实现简单,经济实用,在短时间段内可以准确输出打舵指令,可以广泛应用于末制导炮弹,末修迫弹,末制导迫弹,激光半主动远程简易火箭弹简易制导控制系统等。
说明书
技术领域
本发明涉及弹载计算机,特别涉及基于末制导炮弹的弹载计算机。
背景技术
目前,末制导炮弹系统惯导段的控制一般运用机械设计,这样在控制的时候有较大的弊端,即惯导段开环控制起不到真正的控制作用,尤其在弹体姿态摆动过大的情况下,更容易出现偏差,所以引入数字化弹载计算机,从而实现闭环控制。机械式的控制质量重,体积大,而数字化弹载计算机在轻质量,小体积方面有很大改善。
不过,目前使用的末制导炮弹弹载计算机存在结构复杂,成本高,体积大、重量大等不足。
在低成本,闭环控制,小体积,轻质量,数字化几个方面的不足,本发明提供一种弹载计算机控制系统,该系统为弹设计者提供很好的惯导段控制,缩短弹的研制周期,降低弹的研制费用,具有很高的社会效益和经济效益
发明内容
为了克服现有技术的不足,本发明人进行了锐意研究,发现当将空间定向陀螺、加速度计和角速度陀螺测量得到的弹体运动数据与弹上主芯片(CPU)结合,将通过空间定向陀螺得到的陀螺轴和弹轴夹角以及通过加速度计和角速度陀螺得到的弹体转速和过载值传输至弹上主芯片,弹上主芯片结合所得结果给出惯导段的控制指令分配,将输出指令输出给舵机,控制舵 机准确工作,从而完成本发明。
本发明的目的在于提供一种基于末制导炮弹的弹载计算机,包括测量模块、处理模块和输出控制模块,测量模块用于测量弹体运行数据,处理模块用于将测量模块测得的弹体运行数据结合得到控制指令,输出控制模块将从处理模块得到的控制指令输出至舵机,
其中,测量模块(也称为主CPU处理模块)包括以下姿态传感器:双轴加速度计、滚转轴角速率陀螺和空间定位定向陀螺,所述三个传感器分别通过前端信号处理电路与处理模块中的弹上主芯片(CPU)相连,双轴加速度计和滚转轴角速率陀螺分别通过前端信号处理电路将传感器信号通过采集的方式输入处理模块中的弹上主芯片,空间定位定向陀螺通过前端信号处理电路将传感器信号通过捕获的方式输入处理模块中的弹上主芯片;
处理模块包括变压稳压模块、上电复位模块和弹上主芯片,变压稳压模块将弹上电源稳定为低电压并稳定输出给上电复位模块,再经过抗干扰电路向弹上主芯片供电;
输出控制模块包括光耦(光电耦合器),其输入端与处理模块的弹上主芯片输出端相连,将主芯片输出的控制信号调制输出至弹上舵机。
本发明提供的基于末制导炮弹的弹载计算机各模块体积小,线路连接简易,成本低,过载高,使用便利,广泛适于各种末制导炮弹系列上应用。此外,该弹载计算机在末制导炮弹系统惯导段能有效控制炮弹按照设计工作到达所需目标区域,控制效果良好。发明工程实现简单,经济实用,在短时间段内可以准确输出打舵指令,可以广泛应用于末制导炮弹简易制导控制系统,也可以应用于其他高过载弹上如火箭、火箭弹等。
附图说明
图1是根据本发明弹载计算机的结构示意图。
图2是根据本发明弹载计算机的变压稳压模块电路示意图。
图3是根据本发明弹载计算机的上电复位模块中电路示意图。
图4是根据本发明弹载计算机的抗干扰电路示意图。
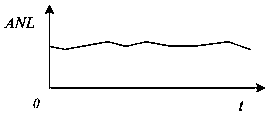
图5是本发明弹载计算机的信号输出曲线。
具体实施方式
以下结合附图,通过具体实施方式对本发明进行详细说明,本发明的特点和优点随着这些说明将变得更为清楚、明确。
本发明提供一种基于末制导炮弹的弹载计算机,包括测量模块、处理模块和输出控制模块,测量模块用于测量弹体运行数据,处理模块用于将测量模块测得的弹体运行数据结合得到控制指令,输出控制模块将从处理模块得到的控制指令输出至舵机,
其中,测量模块包括以下姿态传感器:双轴加速度计、滚转轴角速率陀螺和空间定位定向陀螺,所述三个传感器分别通过前端信号处理电路与处理模块中的弹上主芯片相连,双轴加速度计和滚转轴角速率陀螺分别通过前端信号处理电路将传感器信号通过采集的方式输入处理模块中的弹上主芯片,空间定位定向陀螺通过前端信号处理电路将传感器信号通过捕获的方式输入处理模块中的弹上主芯片;
处理模块包括变压稳压模块、上电复位模块和弹上主芯片,变压稳压模块将弹上电源稳定为低电压并稳定输出给上电复位 模块,再经过抗干扰电路向弹上主芯片供电;
输出控制模块包括光耦(光电耦合器),其输入端与处理模块的弹上主芯片输出端相连,将主芯片输出的控制信号调制输出动弹上舵机。
在根据本发明的弹载计算机中,在测量模块中,双轴加速度计、滚转轴角速率陀螺和空间定位定向陀螺这三个传感器相互之间是独立的,分别通过前端信号处理电路(阻值分压电路)与处理模块中的弹上主芯片相连。其中,双轴加速度计和滚转轴角速率陀螺与弹上主芯片分别通过ADC数据采集的方式相连,双轴加速度计和滚转轴角速率陀螺传感器的数据通过数据采集的方式传输至弹上主芯片,空间定位定向陀螺与弹上主芯片通过捕获的方式相连,空间定位定向陀螺的数据通过捕获的方式传输至弹上主芯片。测量模块与主CPU处理模块之间的连接方式采用集成的ADC数据采集和捕获两种方式完成,测量模块通过12位模数转换器与弹上主芯片相连。捕获单元能够捕获到捕获单元外部引脚的跳变,捕获单元的外部引脚上出现跳变时被触发,每个捕获单元都有捕获引脚。当捕获输入引脚上检测到所选的跳变时,所选的GP定时器的计数值被捕获并存入到一个二级深的FIFO栈中。每个捕获单元的施密特触发器可以捕获到相关引脚的跳变,运用该芯片的捕获单元的中断功能和定时器,可以准确测量出两个沿之间的宽度,即可准确判断触发状态和触发宽度。在发明中使用的采集模/数转换器采用12位模数转换器(8路12位内置模数转换器),包含前端模拟多路复用器,采用保持电路,转换内核,稳压器以及其它模拟支持电路,当对ADC的硬件资源进行配置完成后,根据指令启动A/D采样,即可获取ADC转换后的结果。
在根据本发明的弹载计算机中,在测量模块中,双轴加速 度计没有特别要求,优选使用双轴加速度计ADXL210E。
在根据本发明的弹载计算机中,在测量模块中,滚转轴角速率陀螺没有特别要求,优选使用滚转轴角速率陀螺ADXRS150。
在根据本发明的弹载计算机中,在测量模块中,空间定位定向陀螺是本领域专门的陀螺,专门指空间定位定向陀螺。
在根据本发明的弹载计算机中,主CPU处理模块将采集和捕获到的信号通过CPU中的采集管脚和捕获管脚进入CPU,CPU中有核心控制算法,该算法主要是运用空间定位定向陀螺和滚转角速率陀螺找到真实的弹体重力方向和实时的滚转角,并且结合双轴加速度计得到Y,Z两轴的加速度值,并且由加速度值进行姿态闭环控制,从而得到生成的控制信号(算法可参考《基于DSP弹载计算机控制系统设计》,王伟,北京理工大学学位论文),并将控制信号传输给输出控制模块。
在根据本发明的弹载计算机中,弹上主芯片采用MSP430F149(购自TI公司),其功耗低,体积小,适于弹上应用。
在根据本发明的弹载计算机中,由于主芯片MSP430F149的供电电压为+3.3V,而弹上电池的电源电压为+12V,因此在变压稳压模块采用LM7805器件,LM7805将弹上+12V电源变压为+5V,上电复位模块使用TPS7333Q器件,其将+5V电源变压为+3.3V,再经过抗干扰电路区分数字电压和模拟电压,向弹上主芯片MSP430F149供电。
具体而言,图2示出了变压稳压模块电路,即LM7805及其附属电路,其中,弹上电源连接图中“+12V”处,输出端为“+5V”处,与图3中的“+5V”处连接;
图3示出了上电复位模块电路,即TPS7333Q及其附属电 路,其中,“+5V”与图2中“+5V”相连,“+3.3V”为输出端,与图4中的“+3.3V”连接,“RST”与MSP430F149的“RST”相连;
图4示出了抗干扰电路,其中,“+3.3V”与图3中“+3.3V”连接,“DVcc3”和“AVcc3”分别与MSP430F149的数字电源端和模拟电源端连接。
在本发明的弹载计算机中,变压稳压模块的主要作用是将弹上电池电源的电压进行处理,得到主CPU芯片正常工作的电压,并且电压纹波很小,上电复位电路确保主芯片最小系统能够正常工作。本发明中所用变压稳压模块器件和上电复位电路模块器件体积非常小,与芯片匹配,能向主芯片稳定供电,适于弹上应用。
在本发明的弹载计算机中,输出控制模块输出控制模块的主要作用是将控制信号升压到舵机能够响应的信号,并且起到将主CPU模块与外部舵机、电子部件隔离的作用。
输出控制模块采用光耦输出,输出控制模块输入端为主CPU模块输出端口,主CPU模块输出的PWM波形经过输出控制模块放大成幅值12V且没有相位移动的相同波形。主CPU模块与输出控制模块之间的连接方式是模拟电平信号输出,主CPU模块输出信号采用通用输入/输出管脚经过光耦信号输出放大,控制舵机。输出控制模块输入端和主CPU处理模块匹配,输出控制模块输出端和弹上舵机匹配。此外,输出控制模块也可以采用功率放大器(功放)来实现相应功能。输出控制模块将主CPU模块输出的控制信号调至12V,以驱动弹上舵机。
根据本发明的基于末制导炮弹的弹载计算机根据姿态传感器的姿态信息进行控制算法的处理,得到控制信号控制弹体按照设计好的姿态进行稳定准确飞行。
根据本发明的基于末制导炮弹的弹载计算机,优选还包括壳体,所述壳体包括内壳体和外壳体,内壳体通过包封测量模块、处理模块和输出控制模块,外壳体和端盖包封于内壳体外部,端盖设于外壳体顶部。根据本发明的弹载计算机安装在弹的引信和战斗部位置。
在进一步优选的实施方案中,内壳体与测量模块、处理模块和输出控制模块之间软封装,例如填充有环氧树脂胶、硅凝胶等,内壳体与外壳体之间软封装,例如填充有缓冲材料如硅凝胶,以便改进弹载计算机的抗冲击性能。
实施例1
将上述测量模块、处理模块和输出控制模块分布在一块直径为60mm(Φ60)的圆形电路印制板上,其中,作为双轴加速度计,使用双轴加速度计ADXL210E作为滚转轴角速率陀螺,使用滚转轴角速率陀螺ADXRS150,作为弹上主芯片,使用MSP430F149,双轴加速度计、滚转轴角速率陀螺和空间定位定向陀螺分别通过信号线与弹上主芯片MSP430F149的内置采集模/数转换器相连,,作为光耦,使用光耦TLP521,变压稳压模块电路采用如图2所示电路,上电复位模块电路采用如图3所示电路,抗干扰电路采用如图4所示电路。整套电路系统连接好后通过三个均匀分布在Φ56的圆上的Φ3的孔与内壳体进行连接,连接好后采用环氧树脂封装在铝壳(内壳体)内,端盖安装在外壳体顶部,端盖和外壳体均采用高强度合金钢,确保高过载时不被损坏,内外壳体之间填充有环氧树脂胶211,得到弹载计算机。该弹载计算机安装在末制导炮弹的引信和战斗部位置。各模块与外壳体间有良好的缓冲作用,使得各模块在跑弹发射时在软封装的作用下所受的冲击加速度降低,弹载 计算机系统正常工作。
将以上所得弹载计算机安装于末制导炮弹时,发射炮弹时,弹在发射的瞬间,弹上电池被激活,此时弹载计算机开始供电正常工作,此时主CPU模块中的程序开始运行,等待姿态传感器信号的输入。飞行经过一段时间后,传感器信号就经过测试模块进入到主CPU处理模块,此时主CPU处理模块经过内部控制算法的整合将控制信号输出给输出控制模块,而输出控制模块又将输出控制信号输出给弹上舵机,从而保证弹体姿态按照设计工作到所需目标区域。
在实验中,上述弹载计算机的信号输出曲线如图5所示。
所得弹载计算机的成本极低,其过载达30000G,使用范围广泛,不仅可应用于末制导炮弹,还可以应用于末修迫弹、末制导迫弹、激光半主动远程简易火箭弹简易制导控制系统等。
以上通过反理性实施方式对本发明进行了详细说明,不过这些实施方式并不应理解为对本发明的限制,本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明的技术方案及其实施方式进行多种改进、替换或修饰,这些均应落入本发明的保护范围内。
一种弹载计算机专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0