





专利摘要
本发明涉及一种给无人船提供自动充电及数据交换的便携式无人船移动船坞。包括箱体和箱盖,箱体内部设置有可伸缩导轨,可伸缩导轨由若干节U型导轨相互连接而成,末端设置舱门,可伸缩导轨通过钢丝绳由电机驱动伸缩,完全缩回时全部导轨位于箱体内,舱门闭合于箱体后端,完全伸出时部分导轨和舱门位于箱体之外;舱门下端与可伸缩导轨尾部下端绞接,可垂直向外翻转打开;当船坞固定于岸边时,箱体与水平面呈一倾斜角度Φ,可伸缩导轨的伸出箱体部分位于水面以下。本发明的无人船船坞,为无人船提供充电及数据交换的场所,无人船的整个返航、校准、充电过程均自动完成;便携式船坞给无人船转场运输时提供必要的防护,防止因外界碰撞造成设备损坏。
权利要求
1.一种便携式无人船移动船坞,其特征在于,包括箱体(10)和箱盖(20),所述箱体(10)内部设置有可伸缩导轨(30),可伸缩导轨(30)由若干节U型导轨(31)相互连接而成,末端设置舱门(34),可伸缩导轨(30)通过钢丝绳(32)由电机(33)驱动伸缩,完全缩回时全部导轨(31)位于箱体(10)内,舱门(34)闭合于箱体(10)后端,完全伸出时部分导轨(31)和舱门(34)位于箱体(10)之外;所述舱门(34)下端与可伸缩导轨(30)尾部下端绞接,可垂直向外翻转打开;当船坞固定于岸边时,所述箱体(10)与水平面呈一倾斜角度Φ,可伸缩导轨(30)的伸出箱体(10)部分位于水面以下;
所述无人船(40)具有电源检测模块和GPS导航模块,所述电源检测模块用于自动检测无人船(40)剩余电量,所述GPS导航模块用于自动导航无人船(40)返回到船坞;所述船坞具有超声波测距模块和图像识别模块,所述超声波测距模块用于探测无人船(40)的相对距离,所述图像识别模块用于识别无人船(40)船体上标记的相对位置;所述船坞和无人船(40)还分别设有无线数据发送模块和无线数据接收模块,船坞通过无线数据发送模块发送入坞动作指令,无人船(40)通过无线数据接收模块接收入坞动作指令,并不断修正入坞姿态;所述箱体(10)内部前壁设置有充电及数据交换一体接口(11),无人船(40)船头设有充电及数据交换一体插头(41),所述充电及数据交换一体插头(41)可与充电与数据交换一体接口(11)连接,实现无人船(40)自动充电及数据交换。
2.根据权利要求1所述的便携式无人船移动船坞,其特征在于,所述可伸缩导轨(30)表面设置有导轮,所述导轮包括侧导轮(35)及底部导轮(36),导轮滚动方向与可伸缩导轨(30)伸缩方向一致。
3.根据权利要求1所述的便携式无人船移动船坞,其特征在于,所述倾斜角度Φ为8-15°;当所述可伸缩导轨(30)完全伸出时,其位于水面以下部分的长度L1,大于无人船(40)的长度L2。
4.根据权利要求1所述的便携式无人船移动船坞,其特征在于,所述箱体(10)后端边缘设有锁孔(342),所述舱门(34)边缘相应处设有锁舌(341),所述可伸缩导轨(30)完全缩回、舱门(34)向上翻转关闭时,所述锁舌(341)卡入锁孔(342)啮合锁死。
5.根据权利要求1所述的便携式无人船移动船坞,其特征在于,所述箱体(10)上部内侧设置有拉杆(12),下端内侧设置有滚轮(13),箱体(10)的长宽高三边之和不超过1580mm。
6.根据权利要求1所述的便携式无人船移动船坞,其特征在于,还包括电源接口(14)和蓄电池,所述箱盖(20)为太阳能板。
7.根据权利要求1所述的便携式无人船移动船坞,其特征在于,所述箱体(10)两侧下缘设有折叠式锚杆(15),所述箱盖(20)内表面设置有泡沫垫(21)。
8.根据权利要求1所述的便携式无人船移动船坞,其特征在于,还包括工具箱(16)和平板电脑(17),所述工具箱(16)用于存放维修无人船(40)所需要的配件和工具,所述平板电脑(17)用于设定无人船(40)的航行路线和工作内容。
9.一种无人船自动充电及数据交换的方法,其特征在于,包括以下步骤:
步骤一:无人船(40)的电源检测模块自动检测出无人船(40)的剩余电量低于设定值;
步骤二:无人船(40)向船坞发送返程讯号;
步骤三:无人船(40)通过自带的GPS导航模块自动导航,返回到船坞;
步骤四:船坞通过超声波测距模块检测到无人船(40)的相对距离低于设定值;
步骤五:船坞发送指令,驱动电机(33)转动,带动可伸缩导轨(30)伸出箱体(10),舱门(34)翻转打开,处于放平状态;
步骤六:船坞通过图像识别模块识别无人船(40)船体上预先所设定标记的相对位置;
步骤七:船坞通过无线数据发送模块发送入坞动作指令;
步骤八:无人船(40)通过无线数据接收模块接收入坞动作指令,并相应调整入坞姿态;
步骤九:重复执行步骤六-步骤八,直至无人船(40)船头完全对准箱体(10)内部前壁,船身位于伸出的可伸缩导轨(30)上;
步骤十:船坞发送指令,驱动电机(33)转动,带动可伸缩导轨(30)收回,可伸缩导轨(30)带动无人船(40)逐渐向箱体(10)前壁靠拢,舱门(34)向上翻转合拢;
步骤十一:充电及数据交换一体插头(41)插入充电及数据交换一体接口(11),无人船(40)开始自动充电及数据交换。
10.根据权利要求9所述的无人船自动充电及数据交换的方法,其特征在于,所述步骤十一还包括以下步骤:当无人船(40)进行充电及数据交换时,船坞对无人船(40)的状况进行全面检测,如果发现有异常,则发出报警信号。
说明书
技术领域
本发明涉及无人船船坞,特别是一种给无人船提供自动充电及数据交换的便携式无人船移动船坞。
背景技术
无人船是一种可以无需遥控,借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水面机器人,这种水面智能机器人融合了船舶、通信、自动化、机器人控制、远程监控、网络化系统等技术,实现了自主导航、智能避障、远距离通信、视频实时传输和网络化监控等功能,正被日益广泛应用于环保监测、科研勘探、水下测绘、搜索救援、安防巡逻乃至军事领域。
随着无人船应用越来越广泛,其巡航的范围也越来越大,这给无人船的续航也就是充电问题提出了挑战;另一方面,无人船在工作区域所采集的大量数据,若直接实时传回的话,不但耗时耗能而且可能造成数据泄密。如何保证无人船有足够的续航能力,或保障无人船在执行工作期间可以得到充足的能量补给,以及如何确保无人船工作期间采集的数据能够在保密状态下自动上传和交换,成为了一个亟待解决的问题。
传统的船坞,是造船厂中修、造船舶的工作平台,船坞灌水后可容船舶进出,排水后能在干底上修造船舶。作为船舶在海上航行必不可少的附属设施,传统船坞提供了船舶维护修理和停靠补给的场所和设施工具。而随着现代船舶日益向无人化、自动化、网络化方向发展,人们对船坞的功能也提出了更高的要求。
发明内容
针对以上需求,本发明提供了一种便携式无人船移动船坞,可供无人船自动停泊、自行充电,充电同时进行数据交换,同时,无人船船坞还为无人船提供了一个收纳空间,在转场运输时给无人船提供必要的防护。
本发明的技术方案为:
一种便携式无人船移动船坞,包括箱体和箱盖,所述箱体内部设置有可伸缩导轨,可伸缩导轨由若干节U型导轨相互连接而成,末端设置舱门,可伸缩导轨通过钢丝绳由电机驱动伸缩,完全缩回时全部导轨位于箱体内,舱门闭合于箱体后端,完全伸出时部分导轨和舱门位于箱体之外;所述舱门下端与可伸缩导轨尾部下端绞接,可垂直向外翻转打开;当船坞固定于岸边时,所述箱体与水平面呈一倾斜角度Φ,可伸缩导轨的伸出箱体部分位于水面以下;
所述箱体内部前壁设置有充电及数据交换一体接口;所述无人船具有电源检测模块和GPS导航模块,船头设有充电及数据交换一体插头,所述电源检测模块用于自动检测无人船剩余电量,所述GPS导航模块用于自动导航无人船返回到船坞;所述船坞具有超声波测距模块和图像识别模块,所述超声波测距模块用于探测无人船的相对距离,所述图像识别模块用于识别无人船船体上标记的相对位置;所述船坞和无人船还分别设有无线数据发送模块和无线数据接收模块,船坞通过无线数据发送模块发送入坞动作指令,无人船通过无线数据接收模块接收入坞动作指令,并不断修正入坞姿态,直至船头完全对准箱体内部前壁,船身位于伸出的可伸缩导轨上;所述可伸缩导轨自动收回,使所述充电及数据交换一体插头插入充电及数据交换一体接口,实现自动充电及数据交换。
所述可伸缩导轨表面设置有导轮,所述导轮包括侧导轮及底部导轮,导轮滚动方向与可伸缩导轨伸缩方向一致。
所述倾斜角度Φ为8-15°;当所述可伸缩导轨完全伸出时,其位于水面以下部分的长度L1,大于无人船的长度L2。
所述箱体后端边缘设有锁孔,所述舱门边缘相应处设有锁舌,所述可伸缩导轨完全缩回、舱门向上翻转关闭时,所述锁舌卡入锁孔啮合锁死。
所述箱体上部内侧设置有拉杆,下端内侧设置有滚轮,箱体的长宽高三边之和不超过1580mm。
还包括电源接口和蓄电池,所述箱盖为太阳能板。
所述箱体两侧下缘设有折叠式锚杆,所述箱盖内表面设置有泡沫垫。
还包括工具箱和平板电脑,所述工具箱用于存放维修无人船所需要的配件和工具,所述平板电脑用于设定无人船的航行路线和工作内容。
一种无人船自动充电及数据交换的方法,包括以下步骤:
步骤一:无人船的电源检测模块自动检测出无人船的剩余电量低于设定值;
步骤二:无人船向船坞发送返程讯号;
步骤三:无人船通过自带的GPS导航模块自动导航,返回到船坞;
步骤四:船坞通过超声波测距模块检测到无人船的相对距离低于设定值;
步骤五:船坞发送指令,驱动电机转动,带动可伸缩导轨伸出箱体,舱门翻转打开,处于放平状态;
步骤六:船坞通过图像识别模块识别无人船船体上预先所设定标记的相对位置;
步骤七:船坞通过无线数据发送模块发送入坞动作指令;
步骤八:无人船通过无线数据接收模块接收入坞动作指令,并相应调整入坞姿态;
步骤九:重复执行步骤六-步骤八,直至无人船船头完全对准箱体内部前壁,船身位于伸出的可伸缩导轨上;
步骤十:船坞发送指令,驱动电机转动,带动可伸缩导轨收回,可伸缩导轨带动无人船逐渐向箱体前壁靠拢,舱门向上翻转合拢;
步骤十一:充电及数据交换一体插头插入充电及数据交换一体接口,无人船开始自动充电及数据交换。
所述步骤十一还包括以下步骤:当无人船进行充电及数据交换时,船坞对无人船的状况进行全面检测,如果发现有异常,则发出报警信号。
本发明通过在无人船船坞上设置可自动伸缩的导轨,当无人船位于导轨上时,可伸缩导轨伸出,无人船借以滑出水面,执行既设的工作任务。当无人船检测到自身电量不足时,与船坞建立连接,自动返航,船坞通过自带的超声波测距模块和GPS定位模块,不断检测无人船的入坞位置和入坞姿态,并发送动作指令修正无人船的入坞姿态,直至无人船的充电接头正确对准船坞的充电接口,可伸缩导轨自动缩回,连接接头与接口,使无人船自动进行充电。
本发明的技术方案,具有以下技术效果:
1、无人船在执行任务过程中可得到自动充电续航,充电完毕可以继续执行任务,勿须任务中断;
2、无人船整个返航、校准、充电过程自动完成,无需人为干涉,降低劳动力成本;船坞配合无人船,可承担河海中各种危险或重复枯燥的工作;
3、充电接口带有传输数据功能,无人船充电同时将采集的数据上传至船坞,船坞可即时将数据上传至云端,保证采集数据在传输过程中的保密性以及高效性;
4、船坞配置电源接口,可接入电网取电;太阳能箱盖板可将太阳能转化为电能,绿色环保,电能储存于蓄电池中,用于给无人船充电;
5、船坞配置工具箱和平板电脑,工具箱中配备维修无人船所需要的配件和工具,紧急状况下可对无人船实施维修和更换零件,平板电脑可对无人船的航行路线和工作内容进行设定和更改;
6、便携式船坞形似行李箱,配有轮子和拉杆,其长宽高尺寸之和不超过1580mm,符合航空公司规定的可托运行李箱的最大尺寸标准,便于运输和携带;
7、非工作状态下无人船可存放于便携式船坞的箱体中,便携式船坞给无人船转场运输时提供必要的防护,防止因外界碰撞造成设备损坏。
附图说明
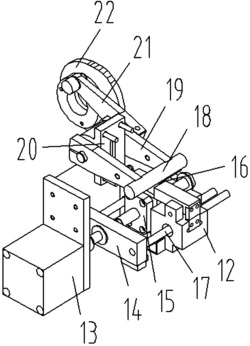
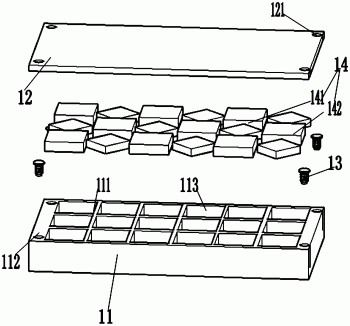
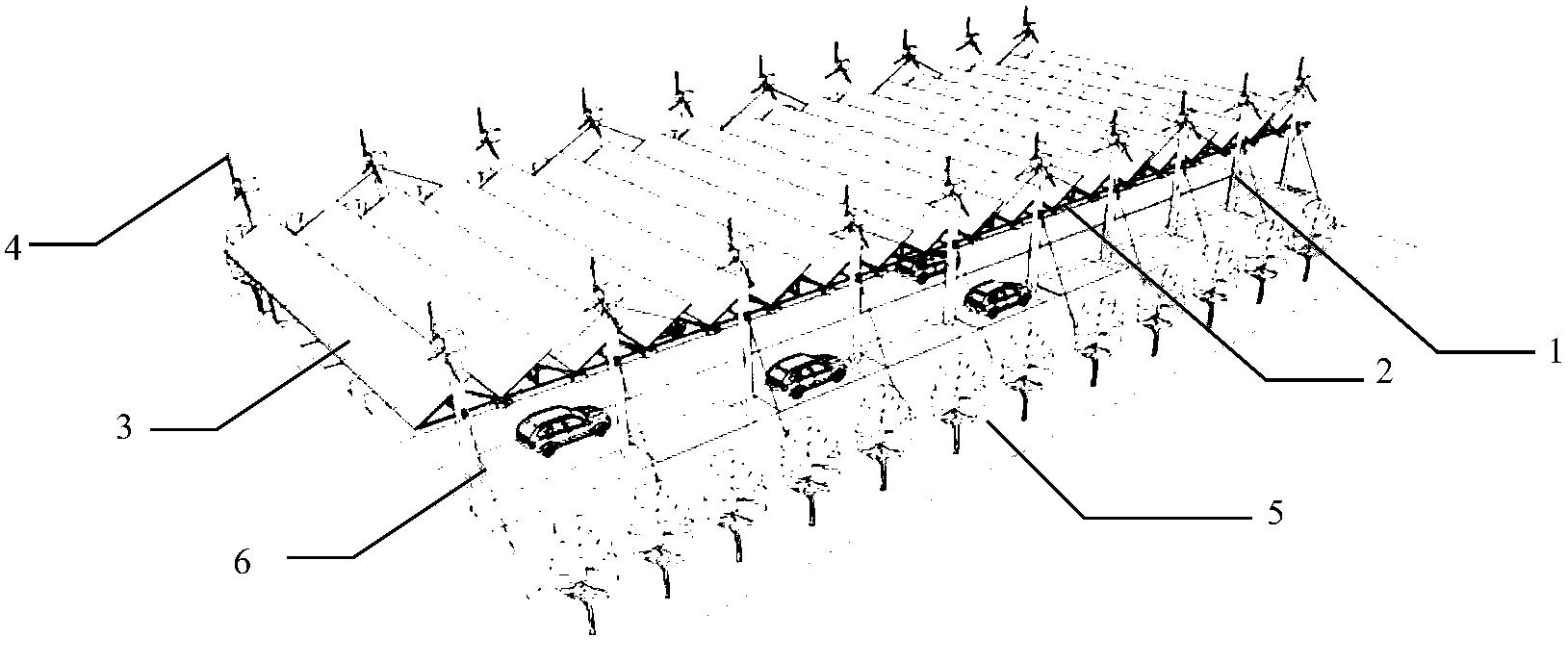
图1为本发明便携式无人船移动船坞的立体结构图;
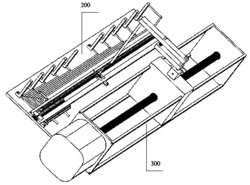
图2为本发明便携式无人船移动船坞的可伸缩导轨和无人船处于水中的状态立体图;
图3为图2的侧视图;
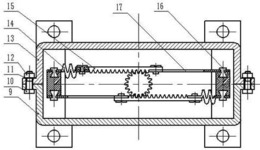
图4为本发明便携式无人船移动船坞收起时的状态图;
图5为本发明便携式无人船移动船坞的可伸缩导轨的结构俯视图;
图6为本发明便携式无人船移动船坞的平板电脑对无人船的设置界面图;
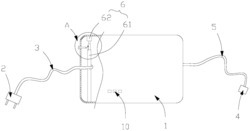
图7为图1的A圈放大正视图。
具体实施方式
以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
参考图1和图5,本发明的便携式无人船移动船坞,包括箱体10和箱盖20,箱体10内部设置有可伸缩导轨30,可伸缩导轨30由若干节U型导轨31相互连接而成,末端设置舱门34,可伸缩导轨30通过钢丝绳32由电机33驱动伸缩,完全缩回时全部导轨31位于箱体10内,舱门34闭合于箱体10后端,完全伸出时部分导轨31和舱门34位于箱体10之外;舱门34下端与可伸缩导轨30尾部下端绞接,可垂直向外翻转打开;当船坞固定于岸边时,箱体10与水平面呈一倾斜角度Φ,可伸缩导轨30的伸出箱体10部分位于水面以下;箱体10两侧下缘设有折叠式锚杆15,用于使无人船船坞固定于岸边。
如图2和图3所示,工作人员到达现场后,打开便携式船坞边上的折叠式锚杆15,折叠式锚杆15扎入泥土,将船坞固定于岸边,稳定可靠。为了使位于船坞内的无人船40能够滑入水面,船坞与水平面的倾斜角度Φ为8~15°。电机33回卷钢丝绳32,钢丝绳32带动滑轮37在轨道槽内滑动,每节U型导轨31均与滑轮37相连,由滑轮37带动,逐节向前伸出,进入水中。
可伸缩导轨30表面设置有导轮,导轮包括侧导轮35及底部导轮36,导轮为自由滚动,滚动方向与可伸缩导轨30伸缩方向一致。由于船坞与水平面具有倾斜角度Φ,可伸缩导轨30亦相对于水平面略微向下倾斜,无人船40在重力作用下,由导轮引导,向水面滑动,位于可伸缩导轨30前端。可伸缩导轨30完全伸出到位后,其位于水面以下部分的长度L1为720mm,无人船40的长度L2为560mm,无人船40全部没入水中,吃水深度约60毫米,已具备航行条件。舱门34自动打开放平,无人船40顺势滑入水中,按照预设路线开始工作。无人船40放出后,另一台电机33带动钢丝绳32反向回卷,可伸缩轨道30自动缩回到箱体10内,舱门34关闭待命。
为了达到使无人船40自动充电及进行数据交换的目的,箱体10内部前壁设置有充电及数据交换一体接口11;无人船40具有电源检测模块和GPS导航模块,船头设有充电及数据交换一体插头41,电源检测模块用于自动检测无人船40剩余电量,GPS导航模块用于自动导航无人船40返回到船坞;船坞具有超声波测距模块和图像识别模块,超声波测距模块用于探测无人船40的相对距离,图像识别模块用于识别无人船40船体上标记的相对位置;船坞和无人船40还分别设有无线数据发送模块和无线数据接收模块,船坞通过无线数据发送模块发送入坞动作指令,无人船40通过无线数据接收模块接收入坞动作指令。
当无人船40上的电源检测模块检测到自身电量不足时,便会与船坞建立链接,通过GPS导航模块自动返航,船坞的超声波测距模块感应到无人船40到达船坞附近后,自动驱动电机33转动,可伸缩导轨30伸出箱体10,进入水面下,舱门34垂直向外翻转打开,处于放平状态。船坞上的图像识别模块开始工作,通过识别无人船40船体上的明显记号与船坞的相对位置,并通过无线数据发送模块给无人船40发送动作指令,使其不断修正入坞姿态,直至无人船40自主行至位于可伸缩导轨30上面,且船头完全对准箱体10内部前壁。
船坞发送指令,电机33回卷钢丝绳32,拉动舱门34向上翻转关闭,同时带动导轨31一节节缩回船坞的箱体10内部,无人船40在导轮引导下,在可伸缩导轨30上向箱体10内部前壁行进,使充电及数据交换一体插头41插入充电及数据交换一体接口11,自动实现充电及数据交换。无人船40进行充电同时,将采集得到的数据信息通过485总线传输给船坞的存储模块上,存储模块将数据信息以无线传输方式上传到云端,工作人员可从云端手动下载数据;数据信息也可直接传输给控制中心,供对比分析。
为了确保充电及数据传输过程不受外界因素打扰,箱体10后端边缘设有锁孔342,舱门34边缘相应处设有锁舌341,可伸缩导轨30完全缩回、舱门34向上翻转关闭时,锁舌341卡入锁孔342啮合锁死,无人船船坞的状态如图4所示,成为封闭的立方体形状。
为了便于运输和携带无人船及船坞,箱体10的长度为800mm,宽度450mm,高度为330mm,其长、宽、高均大于无人船40的外形尺寸,无人船40可容纳于其中。箱盖20可向上翻转打开,便于从开口处放入无人船40,箱盖20内表面设置有泡沫垫21,避免挤压碰撞到无人船40,致使设备挤压变形;便携式船坞给无人船40转场运输时提供必要的防护,防止因外界碰撞造成设备损坏。同时,箱体10上部内侧设置有拉杆12,下端内侧设置有滚轮13,箱体10的长、宽、高三边之和不超过1580mm,符合航空公司规定的可托运行李箱的最大尺寸标准,便于运输和携带。
参考图1,本发明的无人船船坞还包括工具箱16,工具箱16用于存放维修无人船40常用的配件和工具。当无人船40位于船坞中充电或数据交换时,船坞也将对无人船40进行全面检测,如有异常立即报警,工作人员可及时赶来,利用工具箱16中的配件和工具对无人船40进行维修处理,使设备恢复正常工作状态。当无人船40电量满足工作要求、数据传输完毕后,无人船40又可以继续下水工作。
本发明的无人船船坞还包括平板电脑17,平板电脑17用于设定无人船40的航行路线和工作内容。如图6所示,在平板电脑17上,用户通过用户名及密码登陆APP,可对无人船40的航行速度、航行范围、航行任务进行设定,也可查询到当前已经完成的巡航路线和巡航任务;用户还可对船坞的工况进行查询,如网络状况、储备电量、数据信息储量等。
参考图7,本发明的无人船船坞还包括电源接口14和蓄电池,电源接口14可通过电源线接入220V电网取电,存储于蓄电池当中,用于给无人船40充电;箱盖20为太阳能板,可在白天有光照的情况下,自动将太阳能转化为电能,存储于蓄电池中,太阳能板式箱盖20可使无人船船坞在野外工作、无法从电网获取电源时,仍能够正常为无人船40供电,同时提高能源利用率,绿色环保。
本发明的无人船船坞还包括数据接口18和USB接口19,用于船坞与外界交换数据。
本发明的无人船船坞,可为无人船提供充电及数据交换的场所,同时,无人船的整个返航、校准、充电过程均自动完成,无需人为干涉,解决了现有技术中处于广阔水域中工作的无人船无法充电、无法将采集得到的数据实时上传的问题。无人船技术配合本发明的无人船船坞,可承担河海中各种危险或重复枯燥的工作,充分发挥无人船在环保监测、科研勘探、水下测绘、搜索救援、安防巡逻乃至军事领域的重大作用。
以上公开的仅为本发明的实施例,但是,本发明并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
一种便携式无人船移动船坞专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0