






专利摘要
本实用新型公开了一种上台阶平衡车。普通平衡车存在操作难度高、安全系数低、适应能力弱等缺陷。本实用新型包括行进机构、下电动推杆和水平保持机构。行进机构包括动力带轮、第一辅助轮、第二辅助轮、第三辅助轮、内支撑动力板、外支撑板动力板、外支撑辅助板、内支撑辅助板、涡轮蜗杆电机、第一支承轴、前底板、后底板、行进带、第一框架轴、第二框架轴、第三框架轴、第四辅助轮和第二支承轴。水平保持机构包括踏板、上铰支座、下铰支座、上电动推杆和支撑板。本实用新型采用同步带代替普通车轮,增大了与地面的接触面积,并克服了普通车轮需要不定时充气的缺陷。本实用新型能够在凹凸不平的道路上行驶及上台阶。
权利要求
1.一种上台阶平衡车,包括行进机构、下电动推杆和水平保持机构;其特征在于:所述的行进机构包括动力带轮、第一辅助轮、第二辅助轮、第三辅助轮、内支撑动力板、外支撑动力板、外支撑辅助板、内支撑辅助板、涡轮蜗杆电机、第一支承轴、前底板、后底板、行进带、第一框架轴、第二框架轴、第三框架轴、第四辅助轮和第二支承轴;所述第一框架轴的两端与两块外支撑动力板的头端分别固定;所述第二框架轴的两端与两块外支撑动力板的尾端分别构成转动副;两块外支撑动力板的内侧均间隔设置有内支撑动力板;位于同侧的外支撑动力板与内支撑动力板之间间隔设置有m根第一支承轴,2≤m≤8;第一支承轴的两端与位于同侧的外支撑动力板、内支撑动力板底部分别固定;所有第一支承轴上均支承有第三辅助轮;第一框架轴的两端均支承有第二辅助轮;第二框架轴的两端均支承有第一辅助轮;两块内支撑动力板的内侧均固定有涡轮蜗杆电机;两个涡轮蜗杆电机的输出轴上均固定有动力带轮;同一侧的第二辅助轮、第一辅助轮和动力带轮设置在对应侧外支撑动力板和内支撑动力板的间隔内;所述前底板的两端与两块内支撑动力板分别固定;
所述第二框架轴的两端与两块外支撑辅助板的头端分别固定;所述第三框架轴的两端与两块外支撑辅助板的尾端分别固定;两块外支撑辅助板的内侧均间隔设置有内支撑辅助板;位于同侧的外支撑辅助板与内支撑辅助板之间间隔设置有n根第二支承轴,2≤n≤8;所述第二支承轴的两端与位于同侧的外支撑辅助板、内支撑辅助板底部分别固定;所有第二支承轴上均支承有第三辅助轮;第三框架轴的两端均支承有第四辅助轮,第四辅助轮设置在外支撑辅助板与对应侧内支撑辅助板之间;所述后底板的两端与两块内支撑辅助板分别固定;
同一侧的动力带轮、第一辅助轮、第二辅助轮、第三辅助轮和第四辅助轮通过一根行进带连接;
所述的水平保持机构包括踏板、上铰支座、下铰支座、上电动推杆、支撑板、陀螺仪传感器、左前传感器、左后传感器、右前传感器和右后传感器;两块内支撑动力板均与支撑板固定;下电动推杆的一端与后底板铰接,另一端与支撑板铰接;所述踏板的头端固定有上铰支座,支撑板的头端固定有下铰支座;上铰支座与下铰支座铰接;上电动推杆的一端与支撑板铰接,另一端与踏板铰接;踏板上固定有陀螺仪传感器;左前传感器与右前传感器对中固定在踏板上,且间距为a,250mm≤a≤400mm;左后传感器与右后传感器对中固定在踏板上,且间距为a;左前传感器与左后传感器的间距为b,50mm≤b≤150mm。
2.根据权利要求1所述的一种上台阶平衡车,其特征在于:所述前底板的顶面头部固定有测距传感器,测距传感器的检测头向下前方倾斜25°角设置。
3.根据权利要求1所述的一种上台阶平衡车,其特征在于:所述的动力带轮、第一辅助轮、第二辅助轮、第四辅助轮均采用同步带轮,所述的行进带采用双面同步带。
4.根据权利要求1所述的一种上台阶平衡车,其特征在于:同侧的m根第一支承轴等距设置,同侧的n根第二支承轴等距设置。
5.根据权利要求1所述的一种上台阶平衡车,其特征在于:所述的左前传感器、左后传感器、右前传感器和右后传感器均采用压力传感器。
说明书
技术领域
本实用新型属于平衡车技术领域,具体涉及一种能够上台阶的平衡车。
背景技术
在社会飞速发展的今天,交通拥堵日益严重,平衡车成为新型的交通工具。市面上平衡车包括两轮平衡车,独轮平衡车,四轮车,火星车等。普通平衡车内置智能平衡芯片,通过驾驶者通过改变重心位置让按需求行进。操作简单但是也存在一定的缺点。第一,操作难度高,大部分人难以在短时间内掌握骑行技巧,比如在前倾加速时容易站不稳,左右转弯幅度不易控制,上车时不容易掌握平衡。第二,安全系数低,在前进时如果需要拐弯,那就需要把重心倾到拐弯的方向,如果重心不偏移,平衡车拐弯的离心作用容易把人甩出去;此外,一般平衡车都是行驶在非机动车道,非机动车道的自行车和电瓶车都是飞驰而过的,且非机动车经常出现逆行,存在很大的安全隐患。平衡车比较新颖,行驶在道路上很容易吸引大家的注意力,这样就使安全隐患倍增。第三,适应能力弱,在第二点提到普通平衡车一般行驶于非机动车道,但有很大安全隐患,所以就有人想到能不能行驶到人行道上去,但普通平衡车的说明书里专门有提到不建议在坑洼道路上行驶,人行道上的地砖经常是年久失修,坑坑洼洼,会遇到各种障碍,容易使人失衡摔下来,因此使用范围存在局限性。第四,搬动不方便,平衡车15kg左右的重量不便于使用者搬运。第五,需要经常给轮胎打气,给使用者带来不便。
发明内容
本实用新型的目的是针对现有技术的不足,提供一种能够上台阶的平衡车。
本实用新型包括行进机构、下电动推杆和水平保持机构。所述的行进机构包括动力带轮、第一辅助轮、第二辅助轮、第三辅助轮、内支撑动力板、外支撑动力板、外支撑辅助板、内支撑辅助板、涡轮蜗杆电机、第一支承轴、前底板、后底板、行进带、第一框架轴、第二框架轴、第三框架轴、第四辅助轮和第二支承轴。所述第一框架轴的两端与两块外支撑动力板的头端分别固定。所述第二框架轴的两端与两块外支撑动力板的尾端分别构成转动副。两块外支撑动力板的内侧均间隔设置有内支撑动力板。位于同侧的外支撑动力板与内支撑动力板之间间隔设置有m根第一支承轴,2≤m≤8。第一支承轴的两端与位于同侧的外支撑动力板、内支撑动力板底部分别固定。所有第一支承轴上均支承有第三辅助轮。第一框架轴的两端均支承有第二辅助轮;第二框架轴的两端均支承有第一辅助轮。两块内支撑动力板的内侧均固定有涡轮蜗杆电机。两个涡轮蜗杆电机的输出轴上均固定有动力带轮。同一侧的第二辅助轮、第一辅助轮和动力带轮设置在对应侧外支撑动力板和内支撑动力板的间隔内。所述前底板的两端与两块内支撑动力板分别固定。
所述第二框架轴的两端与两块外支撑辅助板的头端分别固定。所述第三框架轴的两端与两块外支撑辅助板的尾端分别固定。两块外支撑辅助板的内侧均间隔设置有内支撑辅助板。位于同侧的外支撑辅助板与内支撑辅助板之间间隔设置有n根第二支承轴,2≤n≤8。所述第二支承轴的两端与位于同侧的外支撑辅助板、内支撑辅助板底部分别固定。所有第二支承轴上均支承有第三辅助轮。第三框架轴的两端均支承有第四辅助轮,第四辅助轮设置在外支撑辅助板与对应侧内支撑辅助板之间。所述后底板的两端与两块内支撑辅助板分别固定。
同一侧的动力带轮、第一辅助轮、第二辅助轮、第三辅助轮和第四辅助轮通过一根行进带连接。
所述的水平保持机构包括踏板、上铰支座、下铰支座、上电动推杆、支撑板、陀螺仪传感器、左前传感器、左后传感器、右前传感器和右后传感器。两块内支撑动力板均与支撑板固定。下电动推杆的一端与后底板铰接,另一端与支撑板铰接。所述踏板的头端固定有上铰支座,支撑板的头端固定有下铰支座。上铰支座与下铰支座铰接。上电动推杆的一端与支撑板铰接,另一端与踏板铰接。踏板上固定有陀螺仪传感器。左前传感器与右前传感器对中固定在踏板上,且间距为a,250mm≤a≤400mm;左后传感器与右后传感器对中固定在踏板上,且间距为a;左前传感器与左后传感器的间距为b,50mm≤b≤150mm。
所述前底板的顶面头部固定有测距传感器,测距传感器的检测头向下前方倾斜25°角设置。
所述的动力带轮、第一辅助轮、第二辅助轮、第四辅助轮均采用同步带轮,所述的行进带采用双面同步带。
同侧的m根第一支承轴等距设置,同侧的n根第二支承轴等距设置。
所述的左前传感器、左后传感器、右前传感器和右后传感器均采用压力传感器。
本实用新型具有的有益效果是:
1、本实用新型采用同步带代替普通车轮,增大了与地面的接触面积,提高稳定性和安全性。此外,同步带克服了普通车轮需要不定时充气的缺陷。
2、本实用新型克服了普通平衡车不能上台阶的缺陷,增强了实用性。
3、本实用新型能够在凹凸不平的道路上行驶,克服了普通平衡车难以在凹凸不平路面上行驶的缺陷。
4、本实用新型只需使用者改变中心即可操作,十分便捷。
附图说明
图1为本实用新型的整体结构示意图;
图2为本实用新型中水平保持机构的立体图;
图3为本实用新型中行进机构的立体图;
图4为本实用新型中各个带轮的示意图。
具体实施方式
以下结合附图对本实用新型作进一步说明。
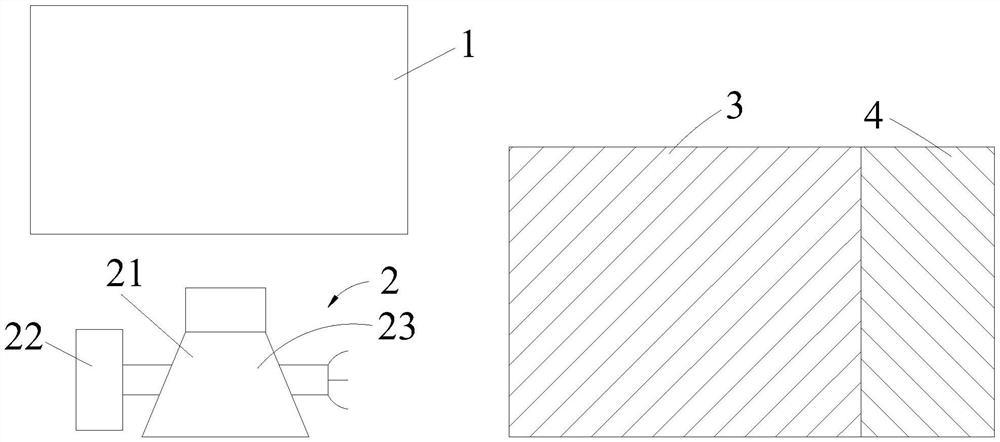
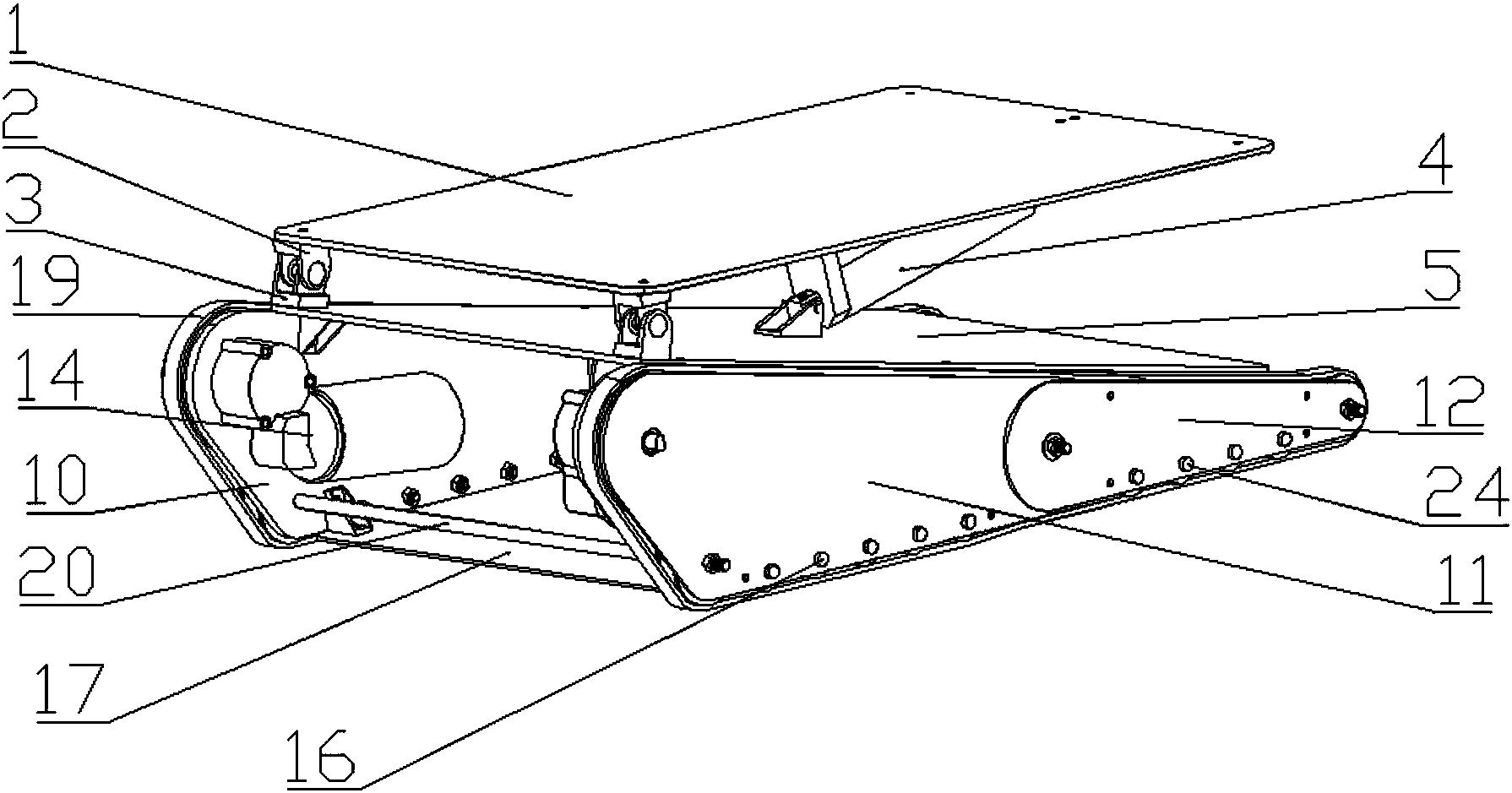
如图1、2、3、4所示,一种上台阶平衡车,包括行进机构、下电动推杆15和水平保持机构。
行进机构包括动力带轮6、第一辅助轮7、第二辅助轮8、第三辅助轮9、内支撑动力板10、外支撑动力板11、外支撑辅助板12、内支撑辅助板13、涡轮蜗杆电机14、第一支承轴16、前底板17、后底板18、行进带19、第一框架轴20、第二框架轴21、第三框架轴22、第四辅助轮23和第二支承轴24。第一框架轴20的两端与两块外支撑动力板11的头端分别固定。第二框架轴21的两端与两块外支撑动力板11的尾端分别构成转动副。两块外支撑动力板11的内侧均间隔设置有内支撑动力板10。位于同侧的外支撑动力板11与内支撑动力板10之间等距设置有五根第一支承轴16。第一支承轴16的两端与位于同侧的外支撑动力板11、内支撑动力板10底部分别固定。所有第一支承轴16上均支承有第三辅助轮9。第一框架轴20的两端均支承有第二辅助轮8,第二框架轴21的两端均支承有第一辅助轮7。两块内支撑动力板10的内侧均固定有涡轮蜗杆电机14。两个涡轮蜗杆电机14的输出轴上均固定有动力带轮6。同一侧的第二辅助轮8、第一辅助轮7和动力带轮6设置在对应侧外支撑动力板11和内支撑动力板10的间隔内。前底板17的两端与两块内支撑动力板10分别固定。前底板17的顶面头部固定有测距传感器,测距传感器的检测头向下前方倾斜25°角设置。
第二框架轴21的两端与两块外支撑辅助板12的头端分别固定。第三框架轴22的两端与两块外支撑辅助板12的尾端分别固定。两块外支撑辅助板12的内侧均间隔设置有内支撑辅助板13。位于同侧的外支撑辅助板12与内支撑辅助板13之间等距设置有四根第二支承轴24。第二支承轴24的两端与位于同侧的外支撑辅助板12、内支撑辅助板13底部分别固定。所有第二支承轴24上均支承有第三辅助轮9。第三框架轴22的两端均支承有第四辅助轮23,第四辅助轮23设置在外支撑辅助板12与对应侧内支撑辅助板13之间。后底板18的两端与两块内支撑辅助板13分别固定。
同一侧的动力带轮6、第一辅助轮7、第二辅助轮8、第三辅助轮9和第四辅助轮23通过一根行进带19连接。动力带轮6、第一辅助轮7、第二辅助轮8、第四辅助轮23均采用同步带轮,行进带19采用双面同步带。
如图1和2所示,水平保持机构包括踏板1、上铰支座2、下铰支座3、上电动推杆4、支撑板5、陀螺仪传感器、左前传感器、左后传感器、右前传感器和右后传感器。两块内支撑动力板10均与支撑板5固定。下电动推杆15的一端与后底板18铰接,另一端与支撑板5铰接。踏板1的头端固定有上铰支座2,支撑板5的头端固定有下铰支座3。上铰支座2与下铰支座3铰接。上电动推杆4的一端与支撑板5铰接,另一端与踏板1铰接。踏板上固定有陀螺仪传感器。左前传感器与右前传感器对中固定在踏板上,且间距为350mm;左后传感器与右后传感器对中固定在踏板上,且间距为350mm;左前传感器与左后传感器的间距为100mm。左前传感器、左后传感器、右前传感器和右后传感器的检测面与踏板上侧面平齐。
本实用新型的工作原理如下:
使用者站上踏板1,左脚前脚掌踩在左前传感器,左脚后脚跟踩在左后传感器,右脚脚前脚掌踩在右前传感器,右脚后脚跟踩在右后传感器。需要前进时,使用者将重心前倾,使得左前传感器与右前传感器检测到的压力值之和大于左后传感器与右后传感器检测到的压力值之和,上台阶平衡车前进。需要后退时,使用者将重心后倾,使得左前传感器与右前传感器检测到的压力值之和小于左后传感器与右后传感器检测到的压力值之和,上台阶平衡车后退。需要左转时,使用者将重心左倾,使得左前传感器与左后传感器检测到的压力值之和大于右前传感器与右后传感器检测到的压力值之和,上台阶平衡车左转。需要右转时,使用者将重心右倾,使得左前传感器与左后传感器检测到的压力值之和小于右前传感器与右后传感器检测到的压力值之和,上台阶平衡车右转。在上下坡路段行驶时,陀螺仪传感器检测到踏板1倾斜,则上电动推杆4启动,使得踏板1保持水平。
遇到台阶时,上台阶平衡车继续向前行驶,当同步带顶到台阶时,同步带的齿咬住第一级台阶的棱角。同步带继续转动,上台阶平衡车爬上第一级台阶,同时,陀螺仪传感器检测到踏板1倾斜后,上电动推杆4启动,使得踏板1保持水平。上台阶平衡车继续向上运动,同步带的齿咬住第二级台阶的棱角。此时,同步带依旧咬住第一级台阶的棱角,使得上台阶平衡车保持平衡。上台阶平衡车持续向上爬行,直至测距传感器检测不到物体,此时同步带上的齿咬住最后一级台阶。下电动推杆15推出,后底板18向下翻出,使得上台阶平衡车在第四辅助轮23支撑下恢复水平状态并登上最后一级台阶。登上最后一级台阶后,下电动推杆15复位。
一种上台阶平衡车专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0