






专利摘要
本发明公开了一种回旋加速器小间隙全方位磁场测量自动控制装置,包括磁极内小间隙全方位测量装置、磁极外全方位自动控制装置;所述磁极内小间隙全方位测量装置包括径向磁场测量装置、角向磁场测量装置;所述磁极外全方位自动控制装置实现磁极内小间隙的径向磁场测量自动控制、以及实现磁极内小间隙的角向磁场测量自动控制、以及实现从径向磁场测量自动控制到角向磁场测量自动控制的随机切换;还公开了一种方法,径向步进运动为一定距离,角向步进运动为一定角度;如果角向运动一周,判断当前径向运动到达外半径边缘。本发明通过在上位机设置一键测量、通过上位机程序实现磁场测量过程的全自动化,保证了测量的精度减少了测量所用的时间。
权利要求
1.一种回旋加速器小间隙全自动磁场测量自动控制装置,其特征在于:包括磁极内小间隙全方位测量装置、磁极外全方位自动控制装置;所述磁极内小间隙全方位测量装置通过驱动绳以及中心轴与磁极外全方位自动控制装置相连接;所述磁极内小间隙全方位测量装置包括径向磁场测量装置、角向磁场测量装置;所述磁极外全方位自动控制装置实现磁极内小间隙的径向磁场测量自动控制、以及实现磁极内小间隙的角向磁场测量自动控制、以及实现从径向磁场测量自动控制到角向磁场测量自动控制的随机切换;所述小间隙高度小于常规光栅尺厚度,该常规光栅尺用于在磁极之间进行径向磁场测量和角向磁场测量;
所述磁极外全方位自动控制装置包括与霍尔探头连接的磁场读取装置、接收磁场读取装置数据的上位计算机、与上位计算机双向通讯的运动控制装置、由运动控制装置控制的角向转台驱动装置以及径向绳轮驱动装置;
所述上位计算机包括一套全自动磁场测量操作软件,该软件能够实现霍尔探头的定位及磁场数据的读取和显示,软件操作界面包含磁场自动测量按键,用鼠标点击该按键后,通过上位机软件控制程序实现角向和径向定位的闭环定位的运动控制以及磁场测量数据的自动读取、与自动存储;
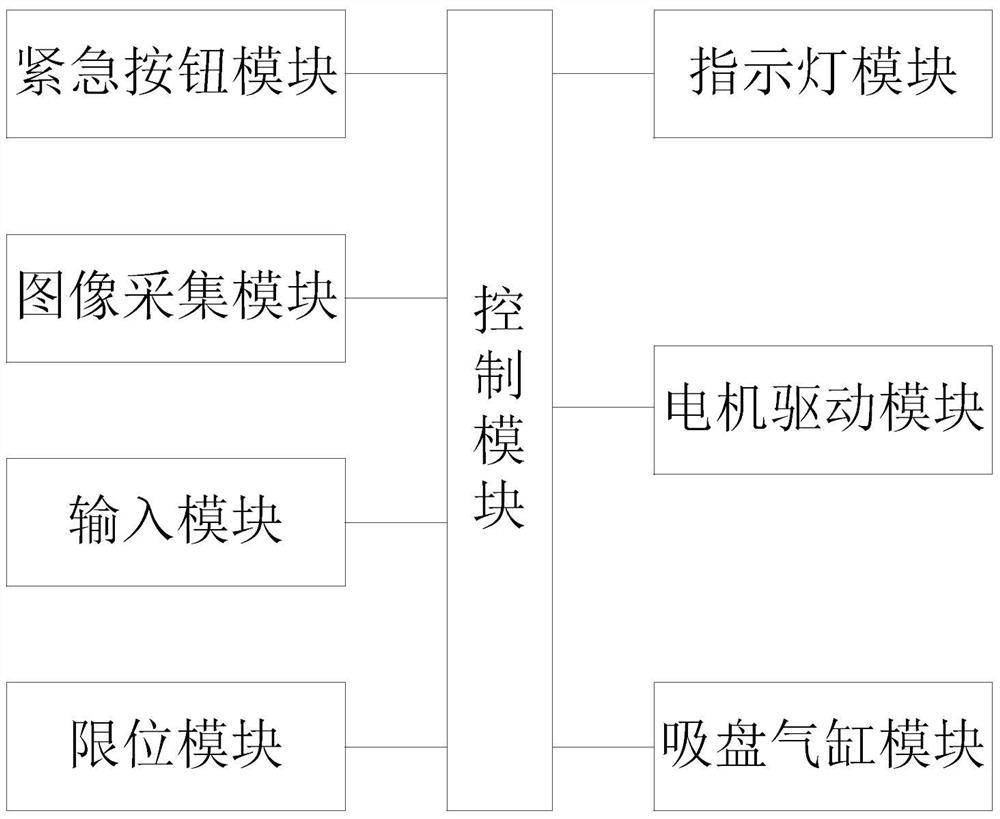
所述上位机软件控制程序包括中央控制模块、磁场数据自动读取模块、磁场数据自动保存模块、角向定位控制模块、径向定位控制模块;
上位机的中央控制模块通过径向定位控制模块向运动控制装置发出指令,运动控制装置根据指令控制径向步进电机,径向步进电机通过传动装置进一步控制驱动绳,驱动绳带动霍尔探头支架在测量臂上径向步进运动;
所述全自动磁场测量自动控制装置采用间接测量驱动绳移动长度的方法代替了光栅尺读数头直接读取移动长度的方法:通过径向测量的标定方法、通过在测量臂上安装驱动绳、径向步进电机带动驱动绳、运动控制装置控制径向步进单机、上位机给运动控制装置发送指令,通过以上一系列动作的组合和各个部件之间的相互支持和依赖,最终用驱动绳代替了光栅尺、以及代替了手工推块的测量方法。
2.根据权利要求1所述一种回旋加速器小间隙全自动磁场测量自动控制装置,其特征在于:所述磁极内小间隙全方位测量装置包括水平布设在磁极之间的小间隙内的环形支撑轨道、布设在沿环形支撑轨道直径两端的测量臂、测量臂径向开有凹槽,槽内中心位置和大半径位置各安装一个正负限位开关,用来限制霍尔探头在测量臂上的运动行程,限位开关采用NPN型光电开关;所述测量臂上还布设有用于带动霍尔探头支架做径向往复运动的驱动绳;所述的霍尔探头支架包括承载霍尔探头的滑块以及与滑块固定连接的霍尔探头。
3.根据权利要求1所述一种回旋加速器小间隙全自动磁场测量自动控制装置,其特征在于:所述磁场读取装置包括用于读取磁场数据的特斯拉计、用于给特斯拉计供电的隔离变压器、用于防止特斯拉计和上位机进行数据通信时信号干扰的RS232/多模光纤转换器;所述的特斯拉计连接霍尔探头即可实现磁场数据及探头处温度值的实时读取和显示,并可通过与上位计算机的串口通讯实现磁场数据的实时共享;所述隔离变压器的输出端与输入端是完全“断路”隔离的,对变压器的输入端起到了一个良好的过滤作用,从而给用电设备提供了纯净的电源电压;为解决特斯拉计与上位计算机通讯的电磁干扰、地线环路干扰和雷电破坏问题,两者通过RS232/多模光纤转换器采用光纤通信。
4.根据权利要求1所述一种回旋加速器小间隙全自动磁场测量自动控制装置,其特征在于:运动控制器,通过两个轴控接口分别连接径向、角向步进电机的两个驱动器,并分别接收径向编码器和角向圆光栅反馈的霍尔探头的径向移动信息和角向移动信息;所述运动控制器通过向径向、角向步进电机驱动器发送脉冲信号及方向信号控制径向、角向步进电机运动;所述角向圆光栅及径向编码器反馈的位置信息通过运动控制器进行读取再传送给上位机进行半闭环控制;所述测量臂上的正负限位开关触发信号也通过运动控制器的通用数字IO信号接口接入控制系统,进而对滑块行程进行限制。
5.根据权利要求4所述一种回旋加速器小间隙全自动磁场测量自动控制装置,其特征在于:所述径向绳轮驱动装置位于加速器下方,包括径向驱动电机、减速机、转轮和角度编码器,该径向驱动电机通过中心轴内的滑轮装置带动所述驱动绳径向移动、驱动绳带动霍尔支架径向移动,从而实现霍尔支架的径向磁场测试自动控制;为保证径向位置反馈的准确性及精度,要求径向角度编码器分辨率好于0.005mm;所述角度编码器通过与径向驱动电机同轴转动转换为驱动绳的移动信息、并将该驱动绳的移动信息反馈给运动控制器。
6.根据权利要求4所述一种回旋加速器小间隙全自动磁场测量自动控制装置,其特征在于所述的角向转台驱动装置,集成了步进电机、涡轮涡杆结构和角向圆光栅尺;所述步进电机驱动涡杆带动角向圆光栅尺的刻度盘和测量臂同步角向旋转,角向圆光栅尺的读数头获取当前的角度位置,并将信息反馈给运动控制器,从而实现角向闭环定位,为保证角向位置反馈的准确性和精度,要求圆光栅的分辨率好于0.0025°,并且要求转台的重复定位精度好于0.005°。
7.根据权利要求4所述一种回旋加速器小间隙全自动磁场测量自动控制装置,其特征在于:所述上位计算机向上与特斯拉计之间通过RS232/多模光纤转换器实现光纤通讯、向下与运动控制器之间通过USB Type B接口进行USB接口通讯。
8.基于权利要求1-7任意一项所述一种回旋加速器小间隙全自动磁场测量自动控制装置的自动测量方法,包括以下步骤:
步骤一、测试前径向位置标定和初始化;
所述初始化为径向归零和角向归零;
所述测试前径向位置标定,具体过程如下:
⑴首先对编码器反馈的脉冲数和霍尔探头位置之间的系数进行理论计算;
具体为:
式中c
⑵在上位软件上进行对应参数设定,完成参数设置后,通过软件移动霍尔探头位置并使用游标卡尺测量每次位移;具体为:
以c
⑶取最终设定系数c为c
⑷验证过程,在最初系数为c的情况下,通过上位软件实现霍尔探头径向绝对运动并用游标卡尺记录实际位移,如误差在允许范围内则确定系数c保持不变,否则根据实际情况对系数c进行微调,并继续上述验证过程;所述的误差为上位软件设定的绝对运动距离s
具体为:
在系数为c的情况下,通过上位软件实现霍尔探头径向绝对运动并用游标卡尺记录实际位移,如误差在允许范围内则确定系数c保持不变,否则根据实际情况对系数c进行微调,并继续上述验证过程;所述误差为上位软件设定的绝对运动距离sh和游标卡尺记录实际位移sr之差;微调过程如下:当sh>sr时,对系数c进行向下微调,略微减少c的值;当sh<sr时,对系数c进行向上微调,略微增大c的值;
步骤二、径向步进运动为一定距离;
步骤三、读取磁场及温度数据并记录;
步骤三、角向步进运动为一定角度;
步骤四、判断当前是否角向运动一周,如果不是,返回步骤三,如果是转向步骤五;
步骤五、角向归零;
步骤六、当前径向运动是否移动到最大半径处,如果否,返回步骤二,继续径向步进运动;如果是,自动测量结束。
说明书
技术领域
本发明属于回旋加速器领域,具体涉及一种回旋加速器小间隙全自动磁场测量自动控制装置。
背景技术
磁场测量是回旋加速器设计阶段的一个非常重要的环节,回旋加速器磁场测量是上下磁极之间水平面内的磁场测量,包括水平面内的径向测量和水平面内的角向磁场测量。
普通回旋加速器上下磁极之间的大间隙磁场测量,角向测量磁场采用角向编码器或圆光栅尺,径向磁场测量则采用径向光栅尺定位,径向测量具体方法为:将测量臂置于磁极气隙内,滑块、光栅尺和走线拖链装配在测量臂槽内,设计驱动机构带来滑块的运动和精确定位。
小型回旋加速器上下磁极之间的极小间隙的磁场测量则不能采用以上光栅尺的方法:因为圆光栅尺和径向光栅尺厚度大约几厘米,而极小间隙只有2.3厘米,光栅尺厚度远大于极小间隙的高度,使得光栅尺不能放到极小间隙之中,因此对于极小间隙小型回旋加速器一般采用半自动化的磁场测量装置开展磁场测量,所述半自动化即角向测量磁场采用自动测量方法、径向磁场测量采用人工辅助定位的方式。所述人工辅助定位方法例如:在测量臂上装满了一定长度的测量快,例如采用2厘米长度的测量快,假设将50个测量块排成一线沿着径向测量磁场,具体方法是将测量方向最前面的测量块拿掉,后面的测量块向前推的方法。该种磁场测量方式精确度较差且耗时耗力,人为出现错误的机率也较高。
发明内容
本发明针对现有技术的不足,提出一种回旋加速器小间隙全自动磁场测量自动控制装置,目的在于解决现有技术小型回旋加速器上下磁极之间的极小间隙的磁场测量,其径向测量采用纯手工化、整体测量(径向测量、角向测量)只能实现半自动化的问题。
本发明为解决其技术问题采用以下技术方案。
一种回旋加速器小间隙全自动磁场测量自动控制装置,其特征在于:包括磁极内小间隙全方位测量装置、磁极外全方位自动控制装置;所述磁极内小间隙全方位测量装置通过驱动绳以及中心轴与磁极外全方位自动控制装置相连接;所述磁极内小间隙全方位测量装置包括径向磁场测量装置、角向磁场测量装置;所述磁极外全方位自动控制装置实现磁极内小间隙的径向磁场测量自动控制、以及实现磁极内小间隙的角向磁场测量自动控制、以及实现从径向磁场测量自动控制到角向磁场测量自动控制的随机切换;所述小间隙高度小于常规光栅尺厚度,该常规光栅尺用于在磁极之间进行径向磁场测量和角向磁场测量。
所述磁极内小间隙全方位测量装置包括水平布设在磁极之间的小间隙内的环形支撑轨道、布设在沿环形支撑轨道直径两端的测量臂、测量臂径向开有凹槽,槽内中心位置和大半径位置各安装一个正负限位开关,用来限制霍尔探头在测量臂上的运动行程,限位开关采用NPN型光电开关;所述测量臂上还布设有用于带动霍尔探头支架做径向往复运动的驱动绳;所述的霍尔探头支架包括承载霍尔探头的滑块以及与滑块固定连接的霍尔探头。
所述磁极外全方位自动控制装置包括与所述霍尔探头连接的磁场读取装置、接收磁场读取装置数据的上位计算机、与上位计算机双向通讯的运动控制装置、由运动控制装置控制的角向转台驱动装置以及径向绳轮驱动装置。
所述磁场读取装置包括用于读取磁场数据的特斯拉计、用于给特斯拉计供电的隔离变压器、用于防止特斯拉计和上位机进行数据通信时信号干扰的RS232/多模光纤转换器;所述的特斯拉计连接霍尔探头即可实现磁场数据及探头处温度值的实时读取和显示,并可通过与上位计算机的串口通讯实现磁场数据的实时共享;所述隔离变压器的输出端与输入端是完全“断路”隔离的,这样就有效的对变压器的输入端(电网供给的电源电压)起到了一个良好的过滤作用,从而给用电设备提供了纯净的电源电压;为解决特斯拉计与上位计算机通讯的电磁干扰、地线环路干扰和雷电破坏等问题,两者通过RS232/多模光纤转换器采用光纤通信。
运动控制器,通过两个轴控接口分别连接径向、角向步进电机的两个驱动器,并分别接收径向编码器和角向圆光栅反馈的霍尔探头的径向移动信息和角向移动信息;所述运动控制器通过向径向、角向步进电机驱动器发送脉冲信号及方向信号控制径向、角向步进电机运动;所述角向圆光栅及径向编码器反馈的位置信息通过运动控制器进行读取再传送给上位机进行半闭环控制;所述测量臂上的正负限位开关触发信号也通过运动控制器的通用数字IO信号接口接入控制系统,进而对滑块行程进行限制。
所述径向绳轮驱动装置位于加速器下方,包括径向驱动电机、减速机、转轮和角度编码器,该径向驱动电机通过中心轴内的滑轮装置带动所述驱动绳径向移动、驱动绳带动所述霍尔支架径向移动,从而实现霍尔支架的径向磁场测试自动控制;为保证径向位置反馈的准确性及精度,要求径向角度编码器分辨率好于0.005mm;所述角度编码器通过与径向驱动电机同轴转动转换为驱动绳的移动信息、并将该驱动绳的移动信息反馈给运动控制器。
所述的角向转台驱动装置,集成了步进电机、涡轮涡杆结构和角向圆光栅尺;所述步进电机驱动涡杆带动角向圆光栅尺的刻度盘和测量臂同步角向旋转,角向圆光栅尺的读数头获取当前的角度位置,并将信息反馈给运动控制器,从而实现角向闭环定位,为保证角向位置反馈的准确性和精度,要求圆光栅的分辨率好于0.0025°,并且要求转台的重复定位精度好于0.005°。
所述上位计算机包括一套全自动磁场测量操作软件,该软件能够实现霍尔探头的定位及磁场数据的读取和显示,软件操作界面包含磁场自动测量按键,用鼠标点击该按键后,通过上位机软件控制程序实现角向和径向定位的闭环定位的运动控制以及磁场测量数据的自动读取、与自动存储;所述上位计算机向上与特斯拉计之间通过RS232/多模光纤转换器实现光纤通讯、向下与运动控制器之间通过USB Type B接口进行USB接口通讯。
一种回旋加速器小间隙全自动磁场测量自动控制装置的自动测量方法,包括以下步骤:
步骤一、测试前径向位置标定和初始化;
所述初始化为径向归零和角向归零;
步骤二、径向步进运动为一定距离;
步骤三、读取磁场及温度数据并记录;
步骤三、角向步进运动为一定角度;
步骤四、判断当前是否角向运动一周,如果不是,返回步骤三,如果是转向步骤五;
步骤五、角向归零;
步骤六、当前径向运动是否移动到最大半径处,如果否,返回步骤二,继续径向步进运动;如果是,自动测量结束。
所述测试前径向位置标定,具体过程如下:
⑴首先对编码器反馈的脉冲数和霍尔探头位置之间的系数进行理论计算;
⑵在上位软件上进行对应参数设定,完成参数设置后,通过软件移动霍尔探头位置并使用游标卡尺测量每次位移;
⑶取最终设定系数c为cn的平均值,并在上位软件上进行最终参数设定;
⑷验证过程,在最初系数为c的情况下,通过上位软件实现霍尔探头径向绝对运动并用游标卡尺记录实际位移,如误差在允许范围内则确定系数c保持不变,否则根据实际情况对系数c进行微调,并继续上述验证过程;所述的误差为上位软件设定的绝对运动距离sh和游标卡尺记录实际位移sr之差。
本发明的优点效果
1、本发明采用间接测量驱动绳移动长度的方法代替了光栅尺读数头直接读取移动长度的方法:通过径向测量的标定方法、通过在测量臂上安装驱动绳、径向步进电机带动驱动绳、运动控制装置控制径向步进单机、上位机给运动控制装置发送指令,通过以上一系列动作的组合和各个部件之间的相互支持和依赖,最终用驱动绳代替了光栅尺、以及代替了手工推块的测量方法,解决了极小间隙下的自动化径向磁场测量的问题,同时,在上位计算机统一调度下,将径向磁场测量自动化和角向磁场测量自动化进行有机结合,实现了二者根据设计需要轮番操作,从而实现了全方位磁场测量自动控制、取得了预料不到的效果。
2、本发明通过在上位机设置一键测量、通过上位机程序实现磁场测量过程的全自动化,减小人为犯错的机率和节约时间成本,解决了小型回旋加速器中心平面磁场高精度、全自动化、一键测量的问题,保证了测量的精度减少了测量所用的时间。
附图说明
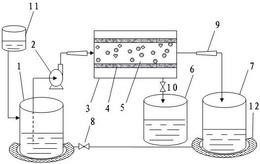
图1为发明小间隙全自动磁场测量自动控制装置;
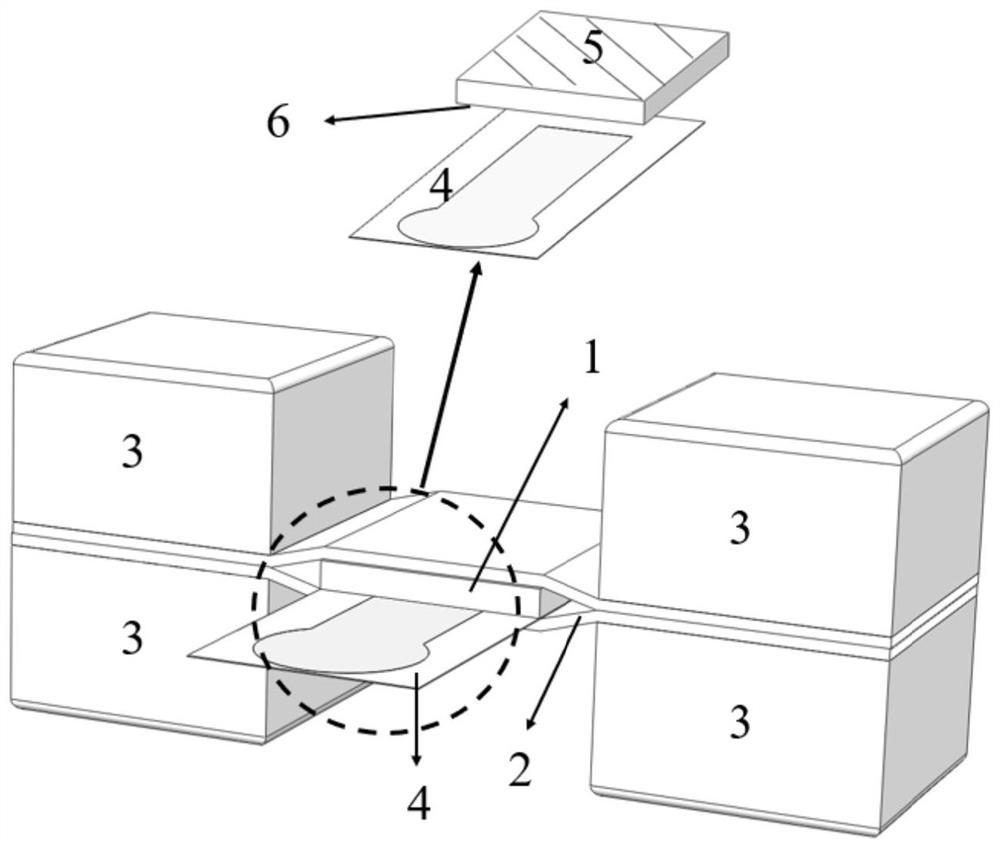
图2为磁极内小间隙全方位测量装置;
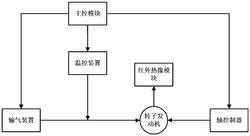
图3为磁极外全方位自动控制装置;
图4为回旋加速器磁场测量侧视图;
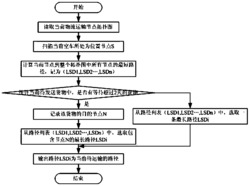
图5为回旋加速器磁场测量流程图。
图中:1:测量臂;2:霍尔探头支架;3:环形支撑轨道;4:驱动绳;5:正限位;6:负限位;7:中心轴;8:滑轮;9:圆光栅读数头;10:径向编码器。
具体实施方式
本发明设计原理
一、径向位置标定方法原理
径向位置标定的过程就是通过理论和实际测量相结合的方式找到径向编码器反馈的脉冲数和霍尔探头实际位置之间的对应关系。具体实现方式如下:
1.首先对编码器反馈的脉冲数和霍尔探头位置之间的系数进行理论计算,即
式中c0为理论计算的单位移动距离对应的脉冲数,p0为编码器转一圈360°反馈的脉冲数,d为绳轮装置中滑轮的直径。因此,针对这一步,只需要测量出滑轮的直径并根据编码器已知的p0就可以求出对应系数的理论值c0。
2、以c0为初始值,在上位软件上进行对应参数设定,完成参数设置后,通过软件移动霍尔探头位置并使用游标卡尺测量每次位移。为提高霍尔探头径向位置标定的精度,上位软件控制霍尔探头移动5段距离,每次移动50mm,并在每次定位完成后使用游标卡尺测量本次霍尔探头移动的实际位移sn(n=1,2..5),同时上位软件记录完成每次移动后径向编码器反馈的脉冲数pn(n=1,2..5)。因此,可求出每段移动过程中径向编码器反馈的脉冲数对应霍尔探头实际位置之间的系数cn(n=1,2..5),即:
3.取最终设定系数c为cn的平均值,并在上位软件上进行最终参数设定,即
4、验证过程,在最系数为c的情况下,通过上位软件实现霍尔探头径向绝对运动并用游标卡尺记录实际位移,如误差(上位软件设定的绝对运动距离sh和游标卡尺记录实际位移sr之差)在允许范围内则确定系数c保持不变,否则根据实际情况对系数c进行微调,并继续上述验证过程。微调过程如下:当sh>sr时,对系数c进行向下微调,略微减少c的值;当sh<sr时,对系数c进行向上微调,略微增大c的值。
基于以上原理,本发明设计了一种回旋加速器小间隙全自动磁场测量自动控制装置。
一种回旋加速器小间隙全自动磁场测量自动控制装置如图1所示,其特征在于:包括磁极内小间隙全方位测量装置、磁极外全方位自动控制装置;所述磁极内小间隙全方位测量装置通过驱动绳以及中心轴与磁极外全方位自动控制装置相连接;所述磁极内小间隙全方位测量装置包括径向磁场测量装置、角向磁场测量装置;所述磁极外全方位自动控制装置实现磁极内小间隙的径向磁场测量自动控制、以及实现磁极内小间隙的角向磁场测量自动控制、以及实现从径向磁场测量自动控制到角向磁场测量自动控制的随机切换;所述小间隙高度小于常规光栅尺厚度,该常规光栅尺用于在磁极之间进行径向磁场测量和角向磁场测量。
如图2、图4所示,所述磁极内小间隙全方位测量装置包括水平布设在磁极之间的小间隙内的环形支撑轨道3、布设在沿环形支撑轨道直径两端的测量臂1、测量臂径向开有凹槽,槽内中心位置和大半径位置各安装一个正负限位开关(5,6),用来限制霍尔探头支架2在测量臂上的运动行程,限位开关采用NPN型光电开关;所述测量臂1上还布设有用于带动霍尔探头支架做径向往复运动的驱动绳4;所述的霍尔探头支架2包括承载霍尔探头的滑块以及与滑块固定连接的霍尔探头。
如图3所示,所述磁极外全方位自动控制装置包括与所述霍尔探头连接的磁场读取装置、接收磁场读取装置数据的上位计算机、与上位计算机双向通讯的运动控制装置、由运动控制装置控制的角向转台驱动装置以及径向绳轮驱动装置。
如图3所示,所述磁场读取装置包括用于读取磁场数据的特斯拉计、用于给特斯拉计供电的隔离变压器、用于防止特斯拉计和上位机进行数据通信时信号干扰的RS232/多模光纤转换器;所述的特斯拉计连接霍尔探头即可实现磁场数据及探头处温度值的实时读取和显示,并可通过与上位计算机的串口通讯实现磁场数据的实时共享;所述隔离变压器的输出端与输入端是完全“断路”隔离的,这样就有效的对变压器的输入端(电网供给的电源电压)起到了一个良好的过滤作用,从而给用电设备提供了纯净的电源电压;为解决特斯拉计与上位计算机通讯的电磁干扰、地线环路干扰和雷电破坏等问题,两者通过RS232/多模光纤转换器采用光纤通信。
如图3、图4所示,运动控制器,通过两个轴控接口分别连接径向、角向步进电机的两个驱动器,并分别接收径向编码器和角向圆光栅反馈的霍尔探头的径向移动信息和角向移动信息;所述运动控制器通过向径向、角向步进电机驱动器发送脉冲信号及方向信号控制径向、角向步进电机运动;所述角向圆光栅及径向编码器反馈的位置信息通过运动控制器进行读取再传送给上位机进行半闭环控制;所述测量臂上的正负限位开关触发信号也通过运动控制器的通用数字IO信号接口接入控制系统,进而对滑块行程进行限制。
如图3、图4所示,所述径向绳轮驱动装置位于加速器下方,包括径向驱动电机、减速机、转轮和角度编码器,该径向驱动电机通过中心轴内的滑轮装置带动所述驱动绳径向移动、驱动绳带动所述霍尔支架径向移动,从而实现霍尔支架的径向磁场测试自动控制;为保证径向位置反馈的准确性及精度,要求径向角度编码器分辨率好于0.005mm;所述角度编码器通过与径向驱动电机同轴转动转换为驱动绳的移动信息、并将该驱动绳的移动信息反馈给运动控制器。
如图3、图4所示,所述的角向转台驱动装置,集成了步进电机、涡轮涡杆结构和角向圆光栅尺;所述步进电机驱动涡杆带动角向圆光栅尺的刻度盘和测量臂同步角向旋转,角向圆光栅尺的读数头获取当前的角度位置,并将信息反馈给运动控制器,从而实现角向闭环定位,为保证角向位置反馈的准确性和精度,要求圆光栅的分辨率好于0.0025°,并且要求转台的重复定位精度好于0.005°。
所述上位计算机包括一套全自动磁场测量操作软件,该软件能够实现霍尔探头的定位及磁场数据的读取和显示,软件操作界面包含磁场自动测量按键,用鼠标点击该按键后,通过上位机软件控制程序实现角向和径向定位的闭环定位的运动控制以及磁场测量数据的自动读取、与自动存储;所述上位计算机向上与特斯拉计之间通过RS232/多模光纤转换器实现光纤通讯、向下与运动控制器之间通过USB Type B接口进行USB接口通讯。
补充说明:
所述上位机软件控制程序包括中央控制模块、磁场数据自动读取模块、磁场数据自动保存模块、角向定位控制模块、径向向定位控制模块。
一种回旋加速器小间隙全自动磁场测量自动控制装置的自动测量方法如图5所示,包括以下步骤:
步骤一、测试前径向位置标定和初始化;
所述初始化为径向归零和角向归零;
所述测试前径向位置标定,具体过程如下:
⑴首先对编码器反馈的脉冲数和霍尔探头位置之间的系数进行理论计算;
⑵在上位软件上进行对应参数设定,完成参数设置后,通过软件移动霍尔探头位置并使用游标卡尺测量每次位移;
⑶取最终设定系数c为cn的平均值,并在上位软件上进行最终参数设定;
⑷验证过程,在最初系数为c的情况下,通过上位软件实现霍尔探头径向绝对运动并用游标卡尺记录实际位移,如误差在允许范围内则确定系数c保持不变,否则根据实际情况对系数c进行微调,并继续上述验证过程;所述的误差为上位软件设定的绝对运动距离sh和游标卡尺记录实际位移sr之差。
补充说明:
上位机的中央控制模块通过角向定位控制模块和径向向定位控制模块分别向运动控制装置发出指令,运动控制装置根据指令控制角向、径向步进电机,角向、径向步进电机通过各自的传动装置进一步控制中心轴和驱动绳,最终实现径向归零、角向归零。
步骤二、径向步进运动为一定距离;
如图5所示,例如径向步进电机运动2cm;
补充说明:
上位机的中央控制模块通过径向向定位控制模块向运动控制装置发出指令,运动控制装置根据指令控制径向步进电机,径向步进电机通过传动装置进一步控制驱动绳,驱动绳带动霍尔探头支架在测量臂上径向步进运动2cm。
步骤三、读取磁场及温度数据并记录;
步骤三、角向步进运动为一定角度;
如图5所示,例如角向步进运动2
补充说明:
上位机的中央控制模块通过角向向定位控制模块向运动控制装置发出指令,运动控制装置根据指令控制角向步进电机,角向步进电机通过传动装置进一步控制中心轴,中心轴带动测量臂角向运动2
步骤四、判断当前是否角向运动一周,如果不是,返回步骤三,如果是转向步骤五;
补充说明:
上位机的中央控制模块通过运动控制装置返回的数据判断当前是否角向运动一周,如果不是,通过上位机的角向定位控制模块向运动控制装置发命令,返回步骤三,如果是转向步骤五;
步骤五、角向归零;
原理同步骤一的补充说明;
步骤六、当前径向运动是否移动到最大半径处,如果否,返回步骤二,继续径向步进运动;如果是,自动测量结束。
补充说明:
上位机的中央控制模块通过运动控制装置返回的数据判断当前径向运动到外半径了吗,如果否,通过上位机的径向向定位控制模块向运动控制装置发命令,返回步骤二,继续径向步进运动;如果是,中央控制模块向运动控制装置发停止测试的命令,运动控制装置控制径向、角向步进电机停止运动。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
回旋加速器小间隙全自动磁场测量自动控制装置和方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。





动态评分
0.0