






专利摘要
本发明涉及一种应用于船舶主汽轮机系统中的改进的船舶主汽轮机预测优化控制方法。本发明包括:(1)建立船用船舶主汽轮机转速滚动优化预测控制所需要的系统模型;(2)对系统的控制步长、输出的预测步长、离散化采样周期、输出期望和相关给定和状态值的初值进行设定;(3)滚动优化,构造当前系统控制算法的目标函数;(4)将当前输出的实际测量值与给定值比较得到误差;(5)重复步骤(3)、步骤(4)进行迭代运算,获得系列状态值。本发明改进了预测控制算法的目标函数,再通过目标函数滚动优化过程中:实现了系统响应的快速性,可以使输出尽快达到给定值上;目标函数在保证输出在给定值上的同时,减少超调量。
权利要求
1.一种船舶主汽轮机预测优化控制方法,其特征在于,包括如下步骤:
(1)建立船用船舶主汽轮机转速滚动优化预测控制所需要的系统模型:
z(k+1)=Az(k)+BΔu(k)+CΔr(k+1);
(2)对系统的控制步长Ny、输出的预测步长Nu,0<Nu≤Nu,Ny和Nu都为正整数、离散化采样周期Ts、输出期望r(k)和相关给定和状态值的初值进行设定;
(3)滚动优化,构造当前系统控制算法的目标函数:
s.t.Δu(k+j)=0,j≥Nu
根据当前相关数据计算后Ny步内的状态预测值及系统输出值和当前最优输出;
(4)将当前输出的实际测量值 与给定值比较得到误差e(k),并将数据送给控制器;当前最优输入 当前状态值 系统输出值 利用传递函数对状态值和输出值进行更新如果输出给定值发生变化,Δr也要更新;
(5)重复步骤(3)、步骤(4)进行迭代运算,获得系列状态值。
2.根据权利要求1所述的一种船舶主汽轮机预测优化控制方法,其特征在于,所述步骤(1)中,构建船舶主汽轮机滚动优化预测控制具体方法:
根据船舶主汽轮机转速状态空间模型:
y=Ccx
得到系统离散化模型:
x(k+1)=Adx(k)+Bdu(k)
y(k)=Cdx(k)
引入增量算子Δ=1-z-1对离散模型处理得到:
Δx(k+1)=AdΔx(k)+BdΔu(k)
Δy(k)=CdΔx(k)
重新选取状态矢量
z(k)=[ΔxT(k) e(k)]T,
构建船舶主汽轮机预测优化控制模型:
z(k+1)=Az(k)+BΔu(k)+CΔr(k+1)
式中:
e(k)=y(k)-r(k),r(k)是主汽轮机转速的参考值,称为输出期望,e(k)为误差值。
3.根据权利要求1所述的船舶主汽轮机滚动优化预测控制方法,其特征在于,所述步骤(2)中,需要设定的初值参量为:
控制步长Ny、输出的预测步长Nu,0<Nu≤Nu,Ny和Nu都为正整数、离散化采样周期Ts、输出期望r(0)。
4.根据权利要求1所述的船舶主汽轮机滚动优化预测控制方法,其特征在于,所述步骤(3)中设当前时刻为k,滚动优化所求的参量为:
从k+1时刻起的Ny步内的状态预测值
及从当前时刻k起系统的最优控制量
Z=Fz(k)+ΦΔU+MΔR
U=-(ΦTQΦ+L)-1ΦTQ[Fz(k)+MΔR]
其中:
ΔR=[Δr(k) Δr(k+1) … Δr(k+Ny-1) Δr(k+Ny)]T。
5.根据权利要求2所述的船舶主汽轮机滚动优化预测控制方法,其特征在于,所述的步骤(4)包括:将当前输出的实际测量值 与给定值比较,得到的误差e(k)进入控制器,
当前最优输入 当前状态值 系统输出值 利用传递函数对状态值和输出值进行更新:
最优输入:
系统状态值:
系统输出值:
Δy(k+1)=CdΔx(k+1)
如果输出给定值发生变化,ΔR也要更新。
说明书
技术领域
本发明涉及一种应用于船舶主汽轮机系统中的改进的船舶主汽轮机预测优化控制方法。
背景技术
船舶主汽轮机作为船舶的动力装置,船舶主汽轮机的动态性能是决定船舶本身性能好坏的重要指标。船舶主汽轮机的转速控制作为一个典型的过程控制系统中,系统的输出往往存在滞后现象,如当船舶主汽轮机进气阀发生变化时,船舶主汽轮机转速的变化只能在一段时间之后观测到。加之船舶在实际航行过程中,由于突发任务或者海况发生变化时,船舶必须具有很好的机动性能才能及时到达指定地点,完成作战、侦查、设伏等任务,因此对汽轮机转速控制具有极高的要求,但是由于汽轮机的大惯性特点,传统的控制方法很难满足控制需求,并且控制效果差,这是目前船舶主汽轮机转速控制的主要问题,需要一种较有效的控制方法。传统控制方法是采用PID控制算法虽然能够起到一定的控制效果,但是随着时代发展这一算法越来越难以满足实际需求。船舶主汽轮机系统中的改进的新型预测优化控制方法针对船舶汽轮机的特点而设计,可以提高控制器的控制效果。
中国博士论文全文库,公开的“船舶汽轮机智能控制研究”等文献中涉及的技术方案,主要侧重采用神经网络、支持向量机对汽轮机模型进行辨识,然后结合预测控制方法设计控制器,缺点是模型复杂、计算量大,实际应用困难。本发明着重采用新型滚动优化预测控制算法解决汽轮机控制过程中出现的问题,针对性的研究。
发明内容
本发明目的在于提供一种能够减少传统控制中的响应时间长、大超调等缺点,并提高能量利用效率的船舶主汽轮机预测优化控制方法。
本发明的目的是这样实现的:
(1)建立船用船舶主汽轮机转速滚动优化预测控制所需要的系统模型:
z(k+1)=Az(k)+BΔu(k)+CΔr(k+1);
(2)对系统的控制步长Ny、输出的预测步长Nu,0<Nu≤Nu,Ny和Nu都为正整数、离散化采样周期Ts、输出期望r(k)和相关给定和状态值的初值进行设定;
(3)滚动优化,构造当前系统控制算法的目标函数:
s.t.Δu(k+j)=0,j≥Nu
根据当前相关数据计算后Ny步内的状态预测值及系统输出值和当前最优输出;
(4)将当前输出的实际测量值 与给定值比较得到误差e(k),并将数据送给控制器;当前最优输入 当前状态值 系统输出值 利用传递函数对状态值和输出值进行更新如果输出给定值发生变化,Δr也要更新;
(5)重复步骤(3)、步骤(4)进行迭代运算,获得系列状态值。
所述步骤(1)中,构建船舶主汽轮机滚动优化预测控制具体方法:
根据船舶主汽轮机转速状态空间模型:
y=Ccx
得到系统离散化模型:
x(k+1)=Adx(k)+Bdu(k)
y(k)=Cdx(k)
引入增量算子Δ=1-z-1对离散模型处理得到:
Δx(k+1)=AdΔx(k)+BdΔu(k)
Δy(k)=CdΔx(k)
重新选取状态矢量
z(k)=[ΔxT(k) e(k)]T,
构建船舶主汽轮机预测优化控制模型:
z(k+1)=Az(k)+BΔu(k)+CΔr(k+1)
式中:
e(k)=y(k)-r(k),r(k)是主汽轮机转速的参考值,称为输出期望,e(k)为误差值。
所述步骤(2)中,需要设定的初值参量为:
控制步长Ny、输出的预测步长Nu,0<Nu≤Nu,Ny和Nu都为正整数,离散化采样周期Ts、输出期望r(0)。
根据权利要求1所述的船舶主汽轮机滚动优化预测控制方法,其特征在于,所述步骤(3)中设当前时刻为k,滚动优化所求的参量为:
从k+1时刻起的Ny步内的状态预测值
及从当前时刻k起系统的最优控制量
Z=Fz(k)+ΦΔU+MΔR
U=-(ΦTQΦ+L)-1ΦTQ[Fz(k)+MΔR]
其中:
ΔR=[Δr(k) Δr(k+1) … Δr(k+Ny-1) Δr(k+Ny)]T。
所述的步骤(4)包括:将当前输出的实际测量值 与给定值比较,得到的误差e(k)进入控制器,
当前最优输入 当前状态值 系统输出值 利用传递函数对状态值和输出值进行更新:
最优输入:
系统状态值:
系统输出值:
Δy(k+1)=CdΔx(k+1)
如果输出给定值发生变化,ΔR也要更新。
本发明具有的有益效果在于:
与传统船舶主汽轮机控制方法相比,本发明改进了预测控制算法的目标函数,再通过目标函数滚动优化过程中:实现了系统响应的快速性,可以使输出尽快达到给定值上;目标函数在保证输出在给定值上的同时,减少超调量,也尽最大可能的消除输出在给定值附近出现小幅抖震的可能;还有一点与传统控制算法相比,目标函数限制了输入值突变跳跃的可能,节省系统消耗;目标函数是可调的,满足不同工况下系统性能的要求;目标函数的参数选取采用遗传算法,做到了控制过程滚动优化。整个控制技术结构简单明确,没有涉及到大量计算,并且控制算法简单。本发明在保证提供精确有效的系统信息前提下,具有很好的控制效果。
附图说明
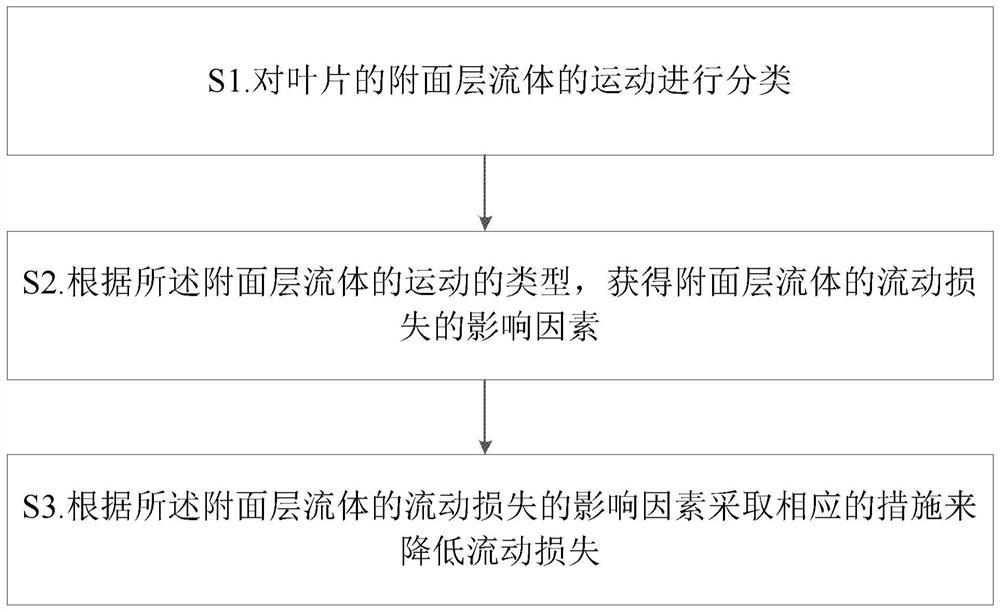
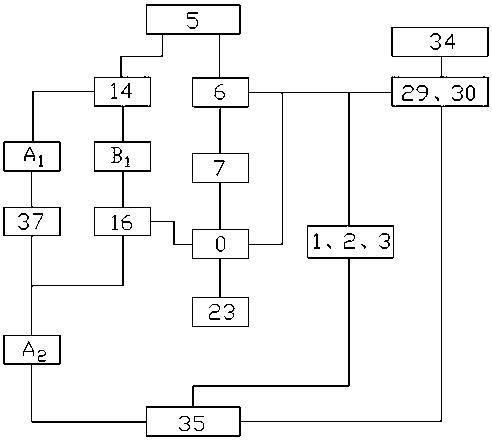
图1为本发明流程框图;
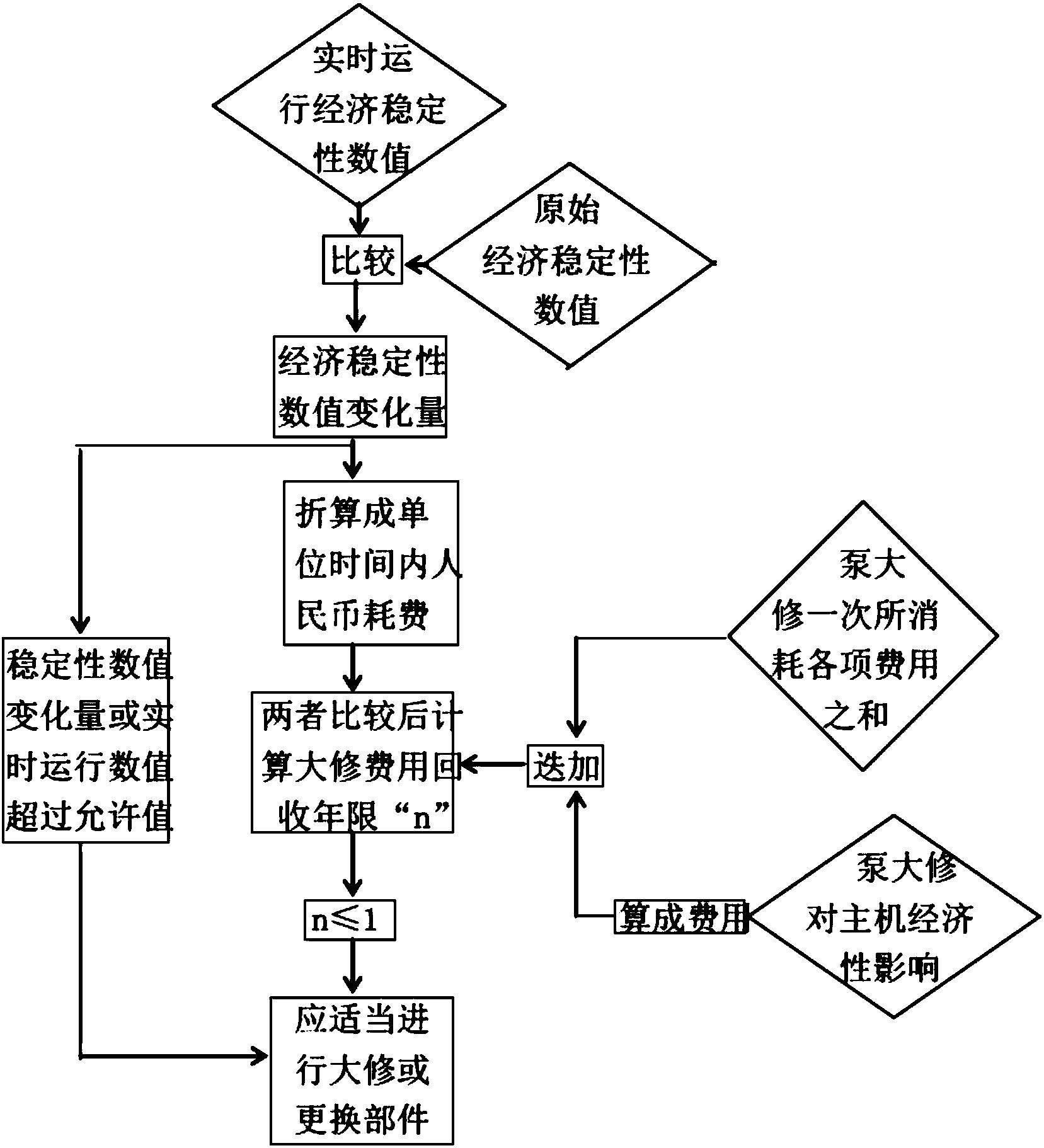
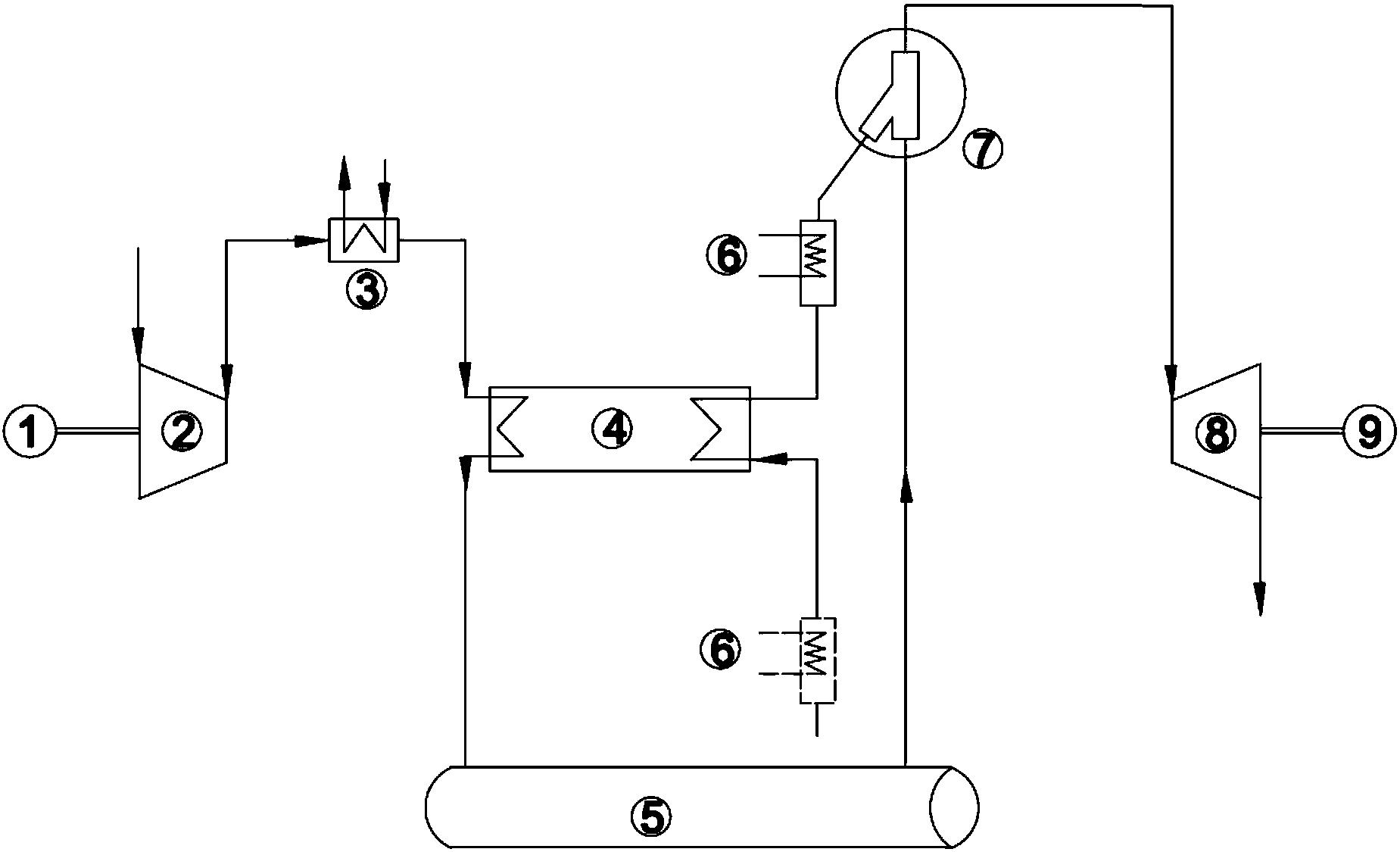
图2为基于船舶主汽轮机转速滚动优化预测控制技术示意图;
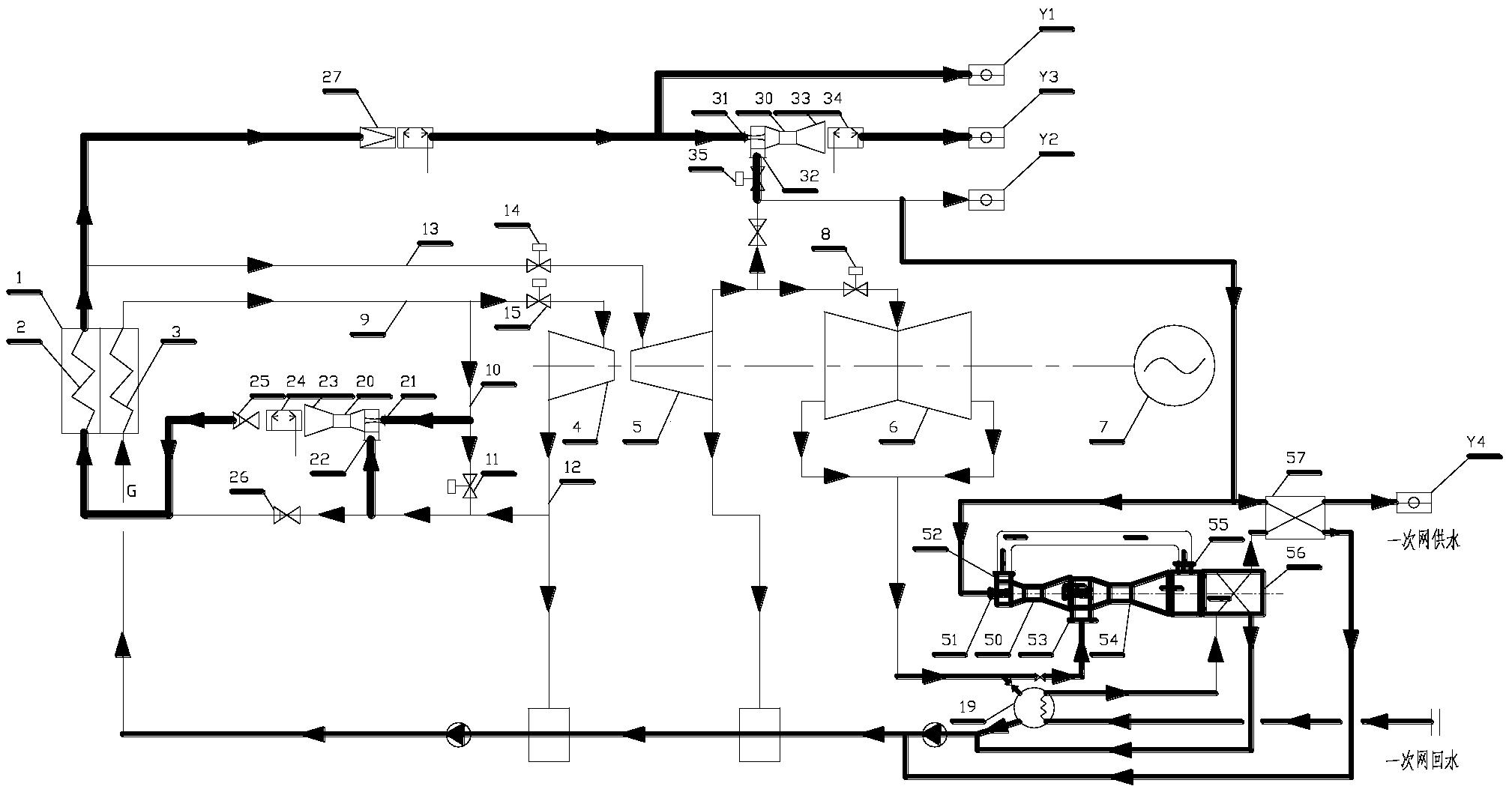
图3为船舶主汽轮机系统作用示意图。
具体实施方式
下面结合附图对本发明做进一步描述。
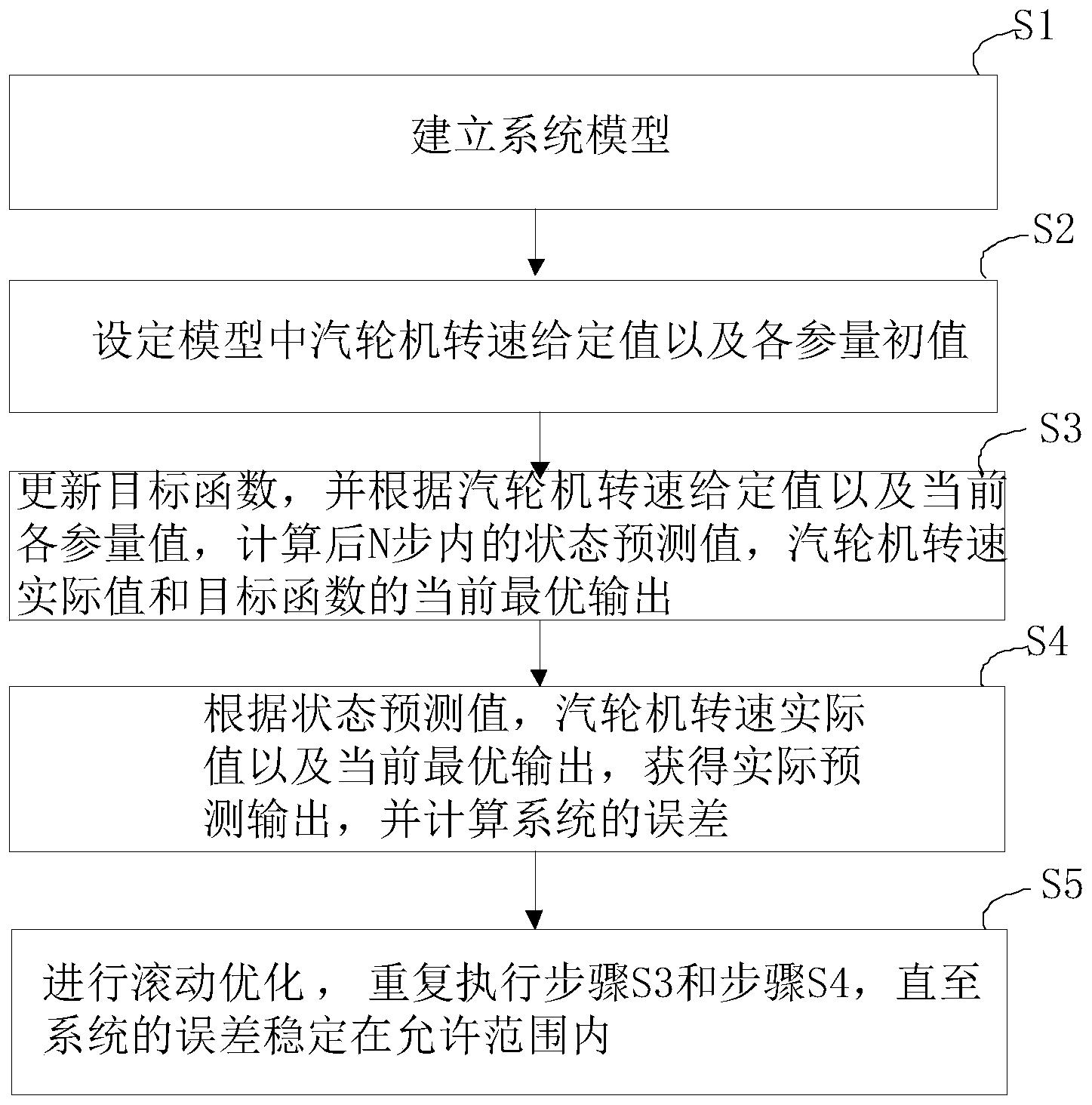
一种船舶主汽轮机滚动优化预测控制技术,包括:
步骤1:建立船用船舶主汽轮机转速滚动优化预测控制所需要的系统模型z(k+1)=Az(k)+BΔu(k)+CΔr(k+1);
步骤2:假设当前时刻为k,对系统的控制步长Ny、输出的预测步长Nu(0<Nu≤Nu,Ny和Nu都为正整数)、离散化采样周期Ts、输出期望r(k)和相关给定和状态值的初值进行设定;
步骤3:滚动优化,构造当前系统控制算法的目标函数J;
其中的加权值Qj,Lj是通过遗传算法寻优得到的;
从后面输入值的表达式就可以看出来,Qj,Lj取值的大小一定程度上决定了输入值的大小。因此以往经验取值是取0或1,这样取值是为了减少计算量;但是这样就会使系统控制效果无法达到最优。为了能够得到最优的控制效果,必须对Qj,Lj值寻优,寻优过程采用遗传算法控制,具体如下:
a)确定Qj,Lj每个参数的大致范围和编码;
b)随机产生n个个体构成的初始种群P(0);
c)将种群中各个体解码成对应参数值,用此参数求代价函数值J及适应函数值f,取
d)应用复制、交叉和变异算子对种群P(t)进行操作,产生下一代种群P(t+1);
e)重复步骤c)和d),直至参数Qj,Lj收敛达到预定指标。
为了便于计算,目标函数变换为:
J=ZTQZ+ΔUTLΔU
假设当前时刻为k,根据当前时刻相关数据计算从第k+1时刻起的Ny步内的状态预测值Z及系统最优控制输出U,具体方法如下:
Z=Fz(k)+ΦΔU+MΔR
U=-(ΦTQΦ+L)-1ΦTQ[Fz(k)+MΔR]
步骤4:将当前输出的实际测量值 与给定值比较,得到的误差e(k)进入控制器。当前最优输入 当前状态值 系统输出值 利用传递函数对状态值和输出值进行更新如果输出给定值发生变化,ΔR也要更新
具体如下:最优输入:
系统状态值:
系统输出值:
Δy(k+1)=-FΔy(k)+HΔu(k-S)
步骤5:重复步骤3、步骤4进行迭代运算,获得一系列状态值。
步骤1:建立船舶主汽轮机转速滚动优化预测控制技术模型z(k+1)=Az(k)+BΔu(k)+CΔr(k+1);
具体方法如下:
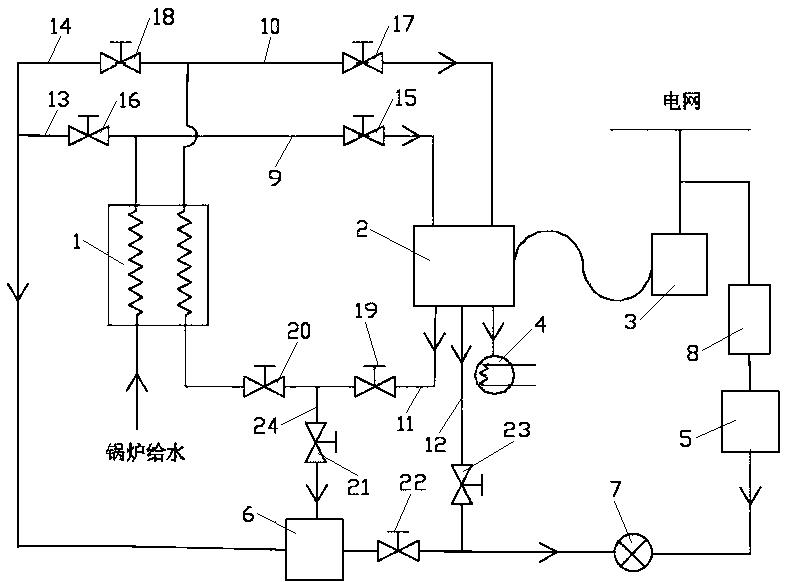
以船舶主汽轮机转速滚动优化预测控制技术为例,主汽轮机转速控制器在船舶蒸汽动力系统中的作用示意如图2所示。
船舶主汽轮机预测优化控制器的控制任务是控制船舶主汽轮机转速保持在给定值上。被控对象是主汽轮机转速值y(t)(rad/s),输入是饱和蒸汽流量u(t)(kg/s),主汽轮机转速给定值为r(t)(rad/s)。
船舶主汽轮机转速状态空间模型:一般表示为:
船舶主汽轮机转速离散状态空间模型:
引入增量算子Δ=1-z-1对船舶主汽轮机转速离散状态空间模型处理得到:
Δx(k+1)=AdΔx(k)+BdΔu(k)
Δy(k)=CdΔx(k)
重新选取状态矢量z(k)=[ΔxT(k)e(k)]T,构建船舶主汽轮机预测优化控制模型:z(k+1)=Az(k)+BΔu(k)+CΔr(k+1)
式中: e(k)=y(k)-r(k),r(k)是主汽轮机转速的参考值,文中称为输出期望,e(k)又被称为误差值。
步骤2:假设当前时刻为k,对系统的控制步长Ny、输出的预测步长Nu(0<Nu≤Nu,Ny和Nu都为正整数)、离散化采样周期Ts、输出期望r(k)和相关给定和状态值的初值进行设定;
将状态Z(0)初值的统计特性为:
步骤3:滚动优化,构造当前系统控制算法的目标函数,具体如下:
s.t.Δu(k+j)=0,j≥Nu
采用遗传算法对Qj,Lj进行寻优,具体如下:
设定目标函数,
a)确定Qj,Lj每个参数的大致范围和编码;
b)随机产生n个个体构成的初始种群P(0);
c)将种群中各个体解码成对应参数值,用此参数求代价函数值J及适应函数值f,取
d)应用复制、交叉和变异算子对种群P(t)进行操作,产生下一代种群P(t+1);
e)重复步骤c)和d),直至参数Qj,Lj收敛达到预定指标。
假设当前时刻为k,根据当前时刻相关数据计算从第k+1时刻起的Ny步内的状态预测值Z及系统最优控制输出U,具体方法如下:
Z=Fz(k)+ΦΔU+MΔR
U=-(ΦTQΦ+L)-1ΦTQ[Fz(k)+MΔR]
u(k)=[1 0 … 0 0]U
将当前输出的实际测量值 与给定值r(k)比较,得到的误差e(k)进入控制器。当前最优输入 当前状态值Z(k)、系统输出值 利用传递函数对状态值和输出值进行更新如果输出给定值发生变化,ΔR也要更新,具体如下:
最优输入:
系统状态值:
Z(k)=Z(k+1)
系统输出值:
步骤5:重复步骤3、步骤4进行迭代运算,获得一系列状态值。
一种船舶主汽轮机预测优化控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0