









专利摘要
本实用新型涉及一种无电缆滑动式自动测斜系统,包括测斜仪和滑动控制装置,测斜仪的上端设置有腔体,腔体固接有吊环,其内部设置有姿态传感器、第一存储器、第一蓝牙模块、第一处理器、第一电池和无线充电模块,滑动控制装置包括支架、下滑控制器和提升器,下滑控制器包括设置在机架上的钢缆卷盘、排缆器、测速滑轮、快挂、电磁制动器、显示屏和电控箱。本实用新型中采用细钢缆代替电缆,使用寿命长,并采用蓝牙模块解决数据传输问题,配合无线充电模块解决自身供电问题;由下滑控制器自动控制测斜仪的位置,降低了人工任务量,且提高了测量的精确度;具备多种测量方式,适用于多种测试要求,可进行多组测试数据对比,有效减少测量误差。
权利要求
1.一种无电缆滑动式自动测斜系统,其特征在于,包括测斜仪和滑动控制装置,所述测斜仪与滑动控制装置连接;
所述测斜仪的上端设置有腔体,所述腔体固接有吊环,其内部设置有姿态传感器、第一存储器、第一蓝牙模块、第一处理器、第一电池和无线充电模块,所述姿态传感器、第一存储器和第一蓝牙模块均与第一处理器电性连接,所述第一电池用于给姿态传感器、第一存储器、第一蓝牙模块和第一处理器供电,所述无线充电模块用于给第一电池充电;
所述滑动控制装置包括支架、下滑控制器和提升器,所述下滑控制器包括设置在机架上的钢缆卷盘、排缆器、测速滑轮、快挂、电磁制动器、显示屏和电控箱,所述钢缆卷盘上的钢缆依次绕过排缆器、测速滑轮后与快挂连接,所述测速滑轮的一侧连接有测速编码器,所述快挂与吊环连接,所述电磁制动器与钢缆卷盘连接,所述电控箱内设置有充电模块、制动器驱动模块、第二蓝牙模块、第二处理器和第二电池,所述制动器驱动模块和第二蓝牙模块均与第二处理器电性连接,所述第二电池用于给制动器驱动模块、第二蓝牙模块和第二处理器供电,所述电磁制动器通过充电模块与第二电池电性连接;所述提升器包括手摇柄和离合装置,所述手摇柄设置在钢缆卷盘的一侧,手摇柄通过离合装置与钢缆卷盘传动连接。
2.如权利要求1所述的无电缆滑动式自动测斜系统,其特征在于,所述测斜仪的上端与腔体密封且可拆卸地连接,其下端设置有缓冲器。
3.如权利要求1所述的无电缆滑动式自动测斜系统,其特征在于,所述钢缆卷盘、排缆器、测速滑轮和显示屏均位于机架的顶部,所述电控箱位于机架的底部。
4.如权利要求1所述的无电缆滑动式自动测斜系统,其特征在于,所述腔体和电控箱内还分别设置有加速度传感器和第二存储器,所述加速度传感器与第一处理器电性连接,所述第二存储器与第二处理器电性连接。
5.如权利要求4所述的无电缆滑动式自动测斜系统,其特征在于,所述腔体和电控箱内还分别设置有第一定时器和第二定时器,所述第一定时器与第一处理器电性连接,所述第二定时器与第二处理器电性连接。
说明书
技术领域
本实用新型涉及自动工程检测技术领域,特别涉及自动测斜仪机器测量方法。
背景技术
测斜工作在基坑工程周边环境监测占有重要的地位,国内常用的测斜仪一般为滑动式测斜仪,滑动式测斜上下各有一对导轮。使用时,人工将测斜仪放入测斜管中,释放与测斜仪连接的电缆,然后按一定的要求拉拽电缆上的刻度控制深度进行测量。
上述测量方式存在以下弊端:1.用来传递信号和输电的电缆在使用过程中极易磨损、断裂,影响测试仪的正常使用,且电缆占用的体积非常大;2.测斜仪的测量位置由人工释放电缆长度确定,为满足监测要求,人工量极大,且控制精度和重复性较差,极易出现监测值奇异点;3.测斜仪的测量方式单一,得到的测量数据有限,易出现测量误差。
实用新型内容
本实用新型所要解决的技术问题是:为了克服现有技术的不足,提供一种无电缆滑动式自动测斜系统。
为了达到上述技术效果,本实用新型采用的技术方案是:一种无电缆滑动式自动测斜系统,包括测斜仪和滑动控制装置,所述测斜仪与滑动控制装置连接;
所述测斜仪的上端设置有腔体,所述腔体固接有吊环,其内部设置有姿态传感器、第一存储器、第一蓝牙模块、第一处理器、第一电池和无线充电模块,所述姿态传感器、第一存储器和第一蓝牙模块均与第一处理器电性连接,所述第一电池用于给姿态传感器、第一存储器、第一蓝牙模块和第一处理器供电,所述无线充电模块用于给第一电池充电;
所述滑动控制装置包括支架、下滑控制器和提升器,所述下滑控制器包括设置在机架上的钢缆卷盘、排缆器、测速滑轮、快挂、电磁制动器、显示屏和电控箱,所述钢缆卷盘上的钢缆依次绕过排缆器、测速滑轮后与快挂连接,所述测速滑轮的一侧连接有测速编码器,所述快挂与吊环连接,所述电磁制动器与钢缆卷盘连接,所述电控箱内设置有充电模块、制动器驱动模块、第二蓝牙模块、第二处理器和第二电池,所述制动器驱动模块和第二蓝牙模块均与第二处理器电性连接,所述第二电池用于给制动器驱动模块、第二蓝牙模块和第二处理器供电,所述电磁制动器通过充电模块与第二电池电性连接;所述提升器包括手摇柄和离合装置,所述手摇柄设置在钢缆卷盘的一侧,手摇柄通过离合装置与钢缆卷盘传动连接。
进一步的,所述测斜仪的上端与腔体密封且可拆卸地连接,其下端设置有缓冲器。
进一步的,所述钢缆卷盘、排缆器、测速滑轮和显示屏均位于机架的顶部,所述电控箱位于机架的底部。
进一步的,所述腔体和电控箱内还分别设置有加速度传感器和第二存储器,所述加速度传感器与第一处理器电性连接,所述第二存储器与第二处理器电性连接。
进一步的,所述腔体和电控箱内还分别设置有第一定时器和第二定时器,所述第一定时器与第一处理器电性连接,所述第二定时器与第二处理器电性连接。
与现有技术相比,本实用新型的有益效果是:
1.采用细钢缆代替电缆,使用寿命长,占用空间小,并且采用蓝牙模块解决数据传输问题,配合无线充电模块解决自身供电问题,提高了测斜仪的可靠性;
2.由下滑控制器自动控制测斜仪的位置,降低了人工任务量,且提高了测量的精确度;
3.该测斜系统具备多种测量方式,适用于多种测试要求,可进行多组测试数据对比,有效减少测量误差。
上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其他目的、特征和优点能够更明显易懂,下面结合附图和实施例对本实用新型做进一步详细说明,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。
附图说明
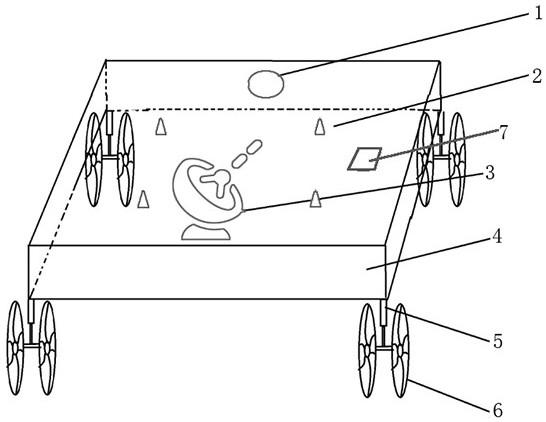
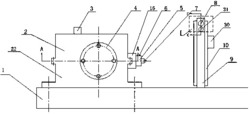
图1为本实用新型的无电缆滑动式自动测斜系统的结构示意图;
图2为图1的A部放大图。
图中各标号和对应的名称为:1.测斜仪,2.腔体,3.吊环,4.机架,5.下滑控制器,6.提升器,7.缓冲器,501.钢缆卷盘,502.排缆器,503.测速滑轮,504.快挂,505.电磁制动器,506.显示屏,507.电控箱,508.测速编码器,601.手摇柄,602.离合装置。
具体实施方式
现在结合附图对本实用新型作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
实施例1
如图1-2所示,本实用新型提供一种无电缆滑动式自动测斜系统,包括测斜仪1和滑动控制装置,测斜仪1与滑动控制装置连接;
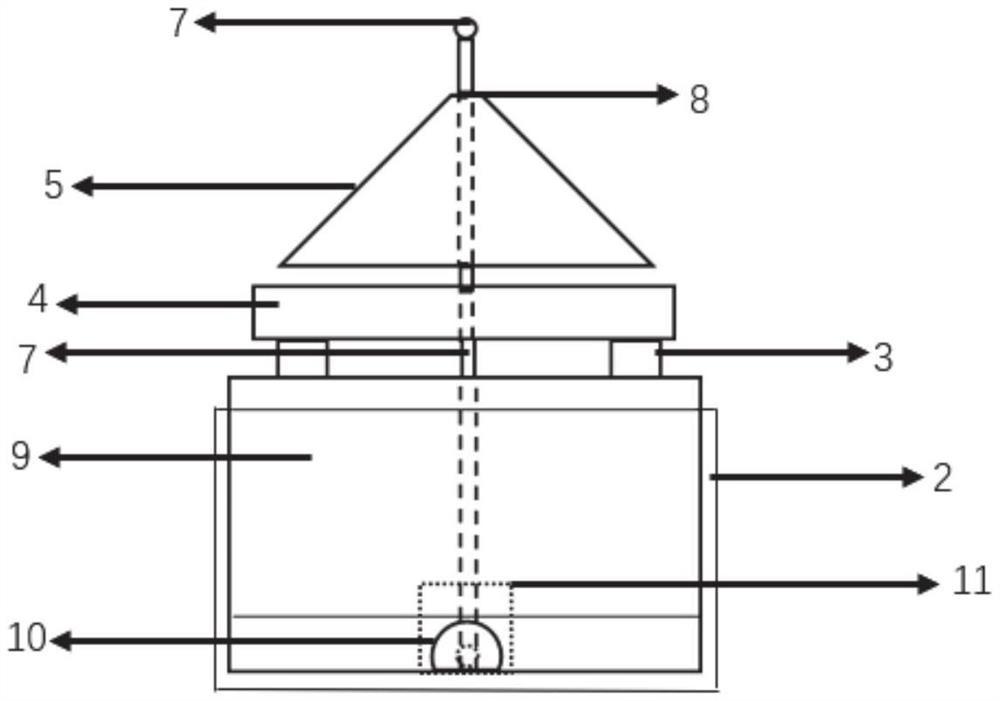
测斜仪1的上端设置有腔体2,腔体2固接有吊环3,其内部设置有姿态传感器、第一存储器、第一蓝牙模块、第一处理器、第一电池和无线充电模块,姿态传感器、第一存储器和第一蓝牙模块均与第一处理器电性连接,第一电池用于给姿态传感器、第一存储器、第一蓝牙模块和第一处理器供电,无线充电模块用于给第一电池充电;
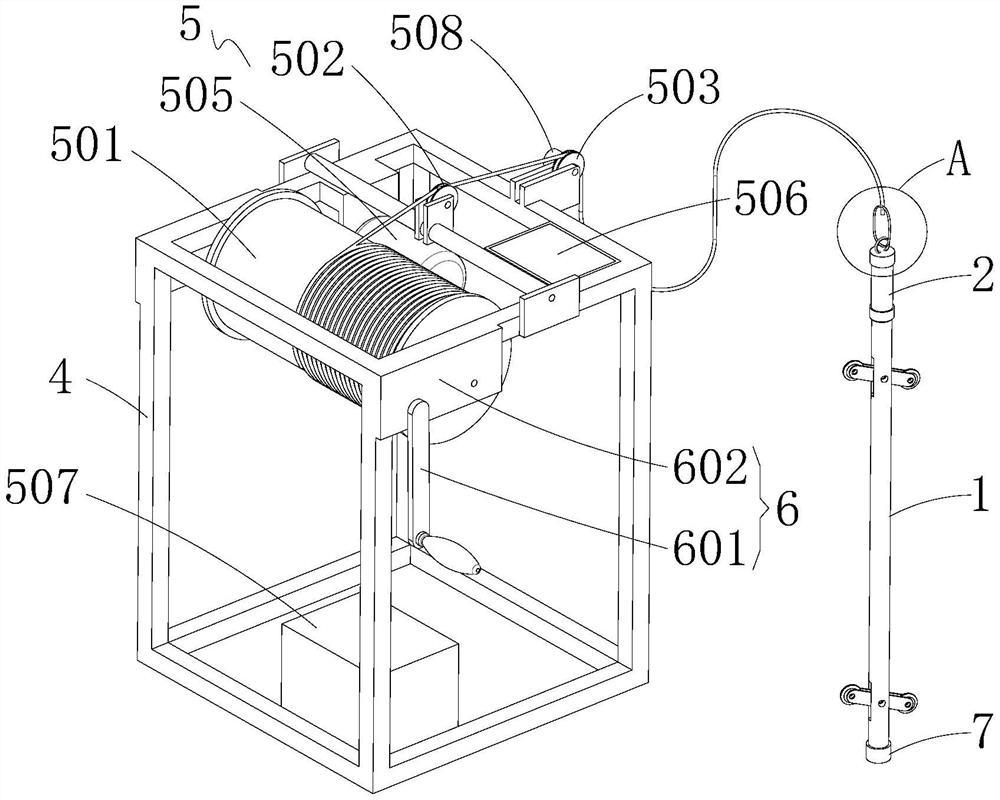
滑动控制装置包括机架4、下滑控制器5和提升器6,下滑控制器5包括设置在机架4上的钢缆卷盘501、排缆器502、测速滑轮503、快挂504、电磁制动器505、显示屏506和电控箱507,钢缆卷盘501上的钢缆依次绕过排缆器502、测速滑轮503后与快挂504连接,测速滑轮503的一侧连接有测速编码器508,快挂504与吊环3连接,电磁制动器505与钢缆卷盘501连接,电控箱507内设置有充电模块、制动器驱动模块、第二蓝牙模块、第二处理器和第二电池,制动器驱动模块和第二蓝牙模块均与第二处理器电性连接,第二电池用于给制动器驱动模块、第二蓝牙模块和第二处理器供电,电磁制动器505通过充电模块与第二电池电性连接;提升器6包括手摇柄601和离合装置602,手摇柄601设置在钢缆卷盘501的一侧,手摇柄601通过离合装置602与钢缆卷盘501传动连接。
本实施例中测斜仪1自身可通过导轮的转动来测量当前深度,采用钢缆代替传统的电缆,配合第一蓝牙模块、第一处理器和第二蓝牙模块实现无线通讯,测量时不受制于电缆的约束,信号传输稳定可靠;无线充电模块可以保证在不打开腔体2的情况下,对测斜仪进行充电,方便使用;姿态传感器用于测量数据采集;钢缆卷盘501通过钢缆连接测斜仪1,这里采用快挂504、吊环3进行连接,操作方便;电磁制动器505不仅用于控制钢缆卷盘501的制动力,还可以进行发电,通过充电模块给第二电池充电,以提高其续航能力;测速滑轮503和测速编码器508可测量并计算测斜仪1的下滑速度和深度;显示屏506用于显示测量数据,方便作业人员观察;电控箱507用于控制该滑动控制装置。
作为本实用新型的优选方案,测斜仪1的上端与腔体2密封且可拆卸地连接,其下端设置有缓冲器7。本实施方案中,将腔体2与测斜仪1采用可拆卸的方式连接,方便维护保养其内部的各种电子元器件,缓冲器7在测斜仪1下落时可起到保护作用,减轻撞击造成的损伤。
其中,钢缆卷盘501、排缆器502、测速滑轮503和显示屏506均位于机架4的顶部,电控箱507位于机架4的底部。本实施方案中,采用该布局方式,利于作业人员操作。
本实施例提供还一种基于导轮测距的连续测量方法,包括以下步骤:
S1:通过手机APP连接测斜仪1和下滑控制器5,进行系统自检,自检完成后设定下滑速度和最大测量深度;测斜仪1通过第一蓝牙模块与手机APP进行无线通讯,下滑控制器5通过第二蓝牙模块与手机APP进行无线通讯;
S2:手机APP先发送指令给测斜仪1,测斜仪1在当前位置深度归零,再对姿态传感器进行数据采集,并将姿态传感器和估算的深度数据存储在第一存储器中;然后手机APP发送指令给下滑控制器5,下滑控制器5深度归零,并将提升器6与钢缆卷盘501切换至不联动状态;
S3:电磁制动器505释放钢缆卷盘501,测斜仪1在重力的作用下开始下滑;
S4:测斜仪1通过钢缆带动测速滑轮503和测速编码器508转动,测量并计算出下滑速度和深度,期间通过电磁制动器505调节制动力度,若测斜仪1下滑速度过快,则加大电磁制动器505的制动力度;若测斜仪1下滑速度过慢,则降低电磁制动器505的制动力度,手机APP和显示屏506可显示当前测斜仪1的深度和下滑速度;
S5:当测斜仪1下滑速度减为零且制动力度低至一定阈值或达到预设的最大深度,则视为测量完成,电磁制动器505锁止,测斜仪1在匀速下滑的状态下,对测斜仪1姿态和深度进行连续测量,并将数据存储在第一存储器中,由手机APP提醒测量完成,同时在显示屏506显示测量完成;
S6:提升器6与钢缆卷盘501切换至联动状态,直至将测斜仪1提升至初始深度;
S7:当下滑控制器5侧得测斜仪1的深度接近零时,手机APP连接测斜仪1,测斜仪1上传测量数据至手机APP,手机APP上传所有数据至云端。
实施例2
本实施例是在实施例1的技术方案的基础上做进一步改进,实施例1描述的技术方案同样适用于本实施例,实施例1已公开的技术方案不再重复描述。
具体的,本实施例与实施例1的区别在于:腔体2和电控箱507内还分别设置有加速度传感器和第二存储器,加速度传感器与第一处理器电性连接,第二存储器与第二处理器电性连接。
本实施例还提供一种基于惯性导航深度估算的分段测量方法,包括以下步骤:
S1:通过手机APP连接测斜仪1和下滑控制器5,进行系统自检,自检完成后设定下滑速度、最大测量深度和分段测量间距;测斜仪1通过第一蓝牙模块与手机APP进行无线通讯,下滑控制器5通过第二蓝牙模块与手机APP进行无线通讯;
S2:手机APP先发送指令给测斜仪1,测斜仪1在当前位置深度归零,再对姿态传感器进行数据采集,并将姿态传感器和估算的深度数据存储在第一存储器中;然后手机APP发送指令给下滑控制器5,下滑控制器5深度归零,并将提升器6与钢缆卷盘501切换至不联动状态;
S3:下滑控制器5和测斜仪1分别根据测量间距计算测斜仪1的下一个测量深度,计算完成后电磁制动器505释放钢缆卷盘501,测斜仪1在重力的作用下开始下滑;
S4:测斜仪1通过钢缆带动测速滑轮503和测速编码器508转动,测量并计算出下滑速度和深度,期间通过电磁制动器505调节制动力度,若测斜仪1下滑速度过快,则加大电磁制动器505的制动力度;若测斜仪1下滑速度过慢,则降低电磁制动器505的制动力度,手机APP和显示屏506可显示当前测斜仪1的深度和下滑速度;
S5:当测斜仪1下滑深度达到下一个测量深度时,电磁制动器505锁止,下滑控制器5将当前的精准数据存储至第二存储器中;
S6:测斜仪1通过惯性导航方式,对加速度传感器测得的加速度值进行积分以获得自身的运动速度,并通过运动速度和运动时间估算当前深度。当测斜仪1测得自身速度为零时,测斜仪1对姿态传感器进行数据采集,并将姿态数据和估算的深度数据暂存;当测斜仪1测得自身向测量方向先加速再减速直至运动速度为零,且估算深度与之前计算的预设测量深度接近,即判定测斜仪1已达下一个测量深度,测斜仪1对姿态传感器进行数据采集,并将姿态数据和估算的深度数据存储在第二存储器中,测量完成后将预设测量深度作为估算测量深度以减少累积误差;
S7:电磁制动器505保持锁止一段时间,确保测斜仪1完成S6;
S8:重复S3至S7,直至测斜仪1下滑速度减为零且制动力度低至一定阈值或到达预设的最大深度,将电磁制动器505锁止,将当前的精确深度数据存储在第二存储器中;
S9:在S8的同时,测斜仪1估算深度接近预设的最大深度且速度为零,测斜仪1对姿态传感器进行数据采集,并将姿态数据和估算的深度数据存储在第一存储器中,测斜仪1判定为测量结束;
S10:电磁制动器505保持锁止一段时间,确保测斜仪1完成S9,由手机APP提醒测量完成,同时在显示屏506显示测量完成;
S11:提升器6与钢缆卷盘501切换至联动状态,直至将测斜仪1提升至初始深度;
S12:在S11的同时,当测斜仪1测得运动方向与测量方向相反,且估算深度减少超过一定阈值时,判定为测量结束,并将测斜仪1速度为零时暂存的姿态数据和估算深度数据存储在第一存储器中;
S13:当下滑控制器5侧得测斜仪1的深度接近零时,手机APP连接测斜仪1和下滑控制器5,将第一存储器中的姿态数据和估算深度数据上传至手机APP;将第二存储器中的精确深度数据上传至手机APP。手机APP根据估算深度,将对应估算深度的姿态数据与精确深度数据进行匹配,最后上传所有数据至云端。
实施例3
本实施例是在实施例2的技术方案的基础上做进一步改进,实施例2描述的技术方案同样适用于本实施例,实施例2已公开的技术方案不再重复描述。
具体的,本实施例与实施例2的区别在于:腔体2和电控箱507内还分别设置有第一定时器和第二定时器,第一定时器与第一处理器电性连接,第二定时器与第二处理器电性连接。
本实施例还提供一种基于时间同步的连续测量方法,包括以下步骤:
S1:通过手机APP连接测斜仪1和下滑控制器5,进行系统自检,自检完成后设定下滑速度、最大测量深度和采样率;测斜仪1通过第一蓝牙模块与手机APP进行无线通讯,下滑控制器5通过第二蓝牙模块与手机APP进行无线通讯;
S2:手机APP同时发送指令给测斜仪1和滑动控制装置,第一定时器和第二定时器均归零;第一定时器开始计时,并按采样率的时间对姿态传感器进行数据采集,然后将姿态数据和采集时间存储在第一存储器中;同时下滑控制器5深度归零,第二定时器开始计时,并按采样率的时间将深度数据和当前的时间存储在第二存储器中;电磁制动器505保持锁止一段时间以确保测斜仪1采集到数据后,提升器6与钢缆卷盘501切换至不联动状态;
S3:电磁制动器505释放钢缆卷盘501,测斜仪1在重力的作用下开始下滑;
S4:测斜仪1通过钢缆带动测速滑轮503和测速编码器508转动,测量并计算出下滑速度和深度,期间通过电磁制动器505调节制动力度,若测斜仪1下滑速度过快,则加大电磁制动器505的制动力度;若测斜仪1下滑速度过慢,则降低电磁制动器505的制动力度,手机APP和显示屏506可显示当前测斜仪1的深度和下滑速度;
S5:当测斜仪1下滑速度减为零且制动力度低至一定阈值或达到预设的最大深度,电磁制动器505锁止,由手机APP提醒测量完成,同时在显示屏506显示测量完成;
S6:提升器6与钢缆卷盘501切换至联动状态,直至将测斜仪1提升至初始深度;
S7:当下滑控制器5侧得测斜仪1的深度接近零时,手机APP连接测斜仪1,测斜仪1将第一存储器中的姿态数据和采集时间数据上传至手机APP;下滑控制器5将第二存储器中的深度数据和当时时间上传至手机APP,手机APP根据记录的时间数据,将深度数据与姿态数据对齐,最后上传所有数据至云端。
实施例4
本实施例提供的无电缆滑动式自动测斜系统与实施例3的结构相同,区别在于,测量方法的不同,本实施例提供一种基于时间同步的分段测量方法,包括以下步骤:
S1:通过手机APP连接测斜仪1和下滑控制器5,进行系统自检,自检完成后设定下滑速度、最大测量深度、分段测量间距和采集时间间隔;测斜仪1通过第一蓝牙模块与手机APP进行无线通讯,下滑控制器5通过第二蓝牙模块与手机APP进行无线通讯;
S2:手机APP同时发送指令给测斜仪1和滑动控制装置,第一定时器和第二定时器均归零;第一定时器开始计时,并按采样间隔时间对姿态传感器进行数据采集,然后将姿态数据和采集时间存储在第一存储器中;同时下滑控制器5深度归零,第二定时器开始计时;
S3:下滑控制器5根据测量间距计算测斜仪1的下一个测量深度,电磁制动器505保持锁止一段时间以确保测斜仪1采集到数据;
S4:电磁制动器505释放钢缆卷盘501,测斜仪1在重力的作用下开始下滑;
S5:测斜仪1通过钢缆带动测速滑轮503和测速编码器508转动,测量并计算出下滑速度和深度,期间通过电磁制动器505调节制动力度,若测斜仪1下滑速度过快,则加大电磁制动器505的制动力度;若测斜仪1下滑速度过慢,则降低电磁制动器505的制动力度,手机APP和显示屏506可显示当前测斜仪1的深度和下滑速度;
S6:当下滑控制器5测量的测斜仪1深度达到下一个测量深度时,电磁制动器505锁止,将当前的深度数据和时间存储在第二存储器中;
S7:电磁制动器505保持锁止至少2个采集时间间隔,确保测斜仪1测量完成;
S8:重复S3至S7,直至测斜仪1下滑速度减为零且制动力度低至一定阈值或达到预设的最大深度,电磁制动器505锁止,下滑控制器5将当前的深度数据和时间存储在第二存储器中,由手机APP提醒测量完成,同时在显示屏506显示测量完成;
S6:提升器6与钢缆卷盘501切换至联动状态,直至将测斜仪1提升至初始深度;
S7:当下滑控制器5侧得测斜仪1的深度接近零时,手机APP连接测斜仪1,测斜仪1将第一存储器中的姿态数据和采集时间数据上传至手机APP;下滑控制器5将第二存储器中的深度数据和时间上传至手机APP,手机APP根据记录的时间数据,将深度数据与姿态数据对齐,最后上传所有数据至云端。
本实用新型不局限于上述具体的实施方式,对于本领域的普通技术人员来说从上述构思出发,不经过创造性的劳动,所作出的种种变换,均落在本实用新型的保护范围之内。
一种无电缆滑动式自动测斜系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0