







专利摘要
本发明(一种MEMS热式声粒子传感器)涉及微电子机械加工领域,尤其涉及一种MEMS热式声粒子传感器的设计方法。目前已有的MEMS热式声粒子传感器都是基于两线式流量计原理,自噪声较大,且高频特性较差。为解决这种问题,本发明提供了一种MEMS三线式热式声粒子传感器结构,可应用于声源定位。该传感器为三层悬臂梁结构,由上下极板粘接而成,包括左右两个正交平面的测量单元。每个测量单元上下两层各有两根感温电阻悬臂梁,中层有一根来自上极板或下极板的加热电阻悬臂梁。上下层的四根悬臂梁组成矩形,中层的悬臂梁位于矩形中心。加工步骤包括:每个测量单元的上下极板的正、反两面各制作三根悬臂梁,去掉上下极板中多余的悬臂梁,将上下极板粘接在一起。
权利要求
1.一种MEMS热式声粒子传感器的结构,该传感器包括由覆盖铂引线的横梁组成的两个正交的测量单元,其特征在于,每个测量单元的横梁分布为三层结构,上层有两根横梁,中层有一根横梁,下层有两根横梁,从测量单元的横截面看,上层和下层的四根横梁组成矩形,中层的横梁位于矩形中心,每个测量单元上层和下层的四根横梁作为感温电阻使用,中层的横梁作为加热电阻使用,可以测量二维空间的声粒子速度,联合两个正交的测量单元可以测量三维空间的声粒子速度。
2.根据权利要求1中所述的声粒子传感器的结构,其特征在于,三层结构由两片极板粘接而成,中间的悬梁来自上极板或下极板。
3.根据权利要求2所述的声粒子传感器的结构,其特征在于,三层结构的加工步骤包括:上下极板每个测量单元的正、反两面各制作三根横梁,根据需要去掉上下极板中不需要的横梁,将上下极板粘接在一起。
说明书
技术领域
本发明涉及微电子机械加工领域,尤其涉及一种MEMS热式声粒子传感器的设计方法。
背景技术
声矢量传感器技术是21世纪我国水声技术领域最有发展潜力的研究方向之一,其在工业和生活中也有广泛的应用。在日常生活中,矢量传感器可以用于声音定位,如汽车故障检测、生命体探测等;在水声领域,可以用于水声信号探测、水下侦查等。声矢量包括声粒子速度和声压两部分,其中声压检测方式较为成熟,而声粒子速度检测是一大难点。
传统的声粒子传感器并不是基于微电子技术,是用间接的方法进行测量。应用最广的是压差式声粒子传感器和同振式声粒子传感器,压差式声粒子传感器由两个相距一定距离的声压传感器组成,通过测量两点的声压差,近似的得到声压梯度,进而推出声粒子速度,这种传感器结构简单,但是工作频带较窄、声压梯度或振速灵敏度较低,特别是在低频和弱信号声场情况下,输出信噪比不很高,所有这些缺陷使压差式矢量传感器的应用受到了限制。同振式传感器敏感元件是内部的振子,一般指加速度、速度或位移传感器。将其置于水下声场中时,声波不直接作用在内部敏感元件上,而是在力的作用下矢量水听器的外壳先产生运动,然后弹性元件将这种运动传到内部振子上,而内部振子由于有一个足够大的质量块,因此其保持静止状态,这样就必然导致振动传感器内部敏感元件变形,从而产生电信号。同振式声粒子传感器使用时需要采用弹簧悬挂在刚性框架内,这样弹簧及框架势必会带来声场畸变。因此同振式声粒子传感器尽管技术稳定,性能可靠,灵敏度高,特别是低频指向性能好,但由于工艺技术复杂仍然限制了其进一步发展。
随着MEMS技术的发展,基于MEMS技术的声粒子传感器有着低功耗、小体积、高灵敏度和宽频带等特点,许多公司、学校和科研单位都对其展开了研究。其中,基于传热学原理的MEMS热式声粒子传感器能直接测量声粒子速度,具有更快的响应速度、更高的灵敏度和方向性,有很大的研究价值。Microflown公司对于MEMS热式声粒子传感器有多年的研究技术和背景,其最新的产品是三维声粒子传感器,基本原理是两线式流量计原理,声音传播会引起空气震动,通过检测两根热线的温差来得到垂直于两热线方向上的声音分量,三对正交的热线组即能测量三维空间的声矢量,该结构有以下两点不足之处:
自噪声较大,由于一对线组的两根悬梁均被加热,产生的热噪声比单根悬梁加热大;
高频特性较差,一对线组的两根悬梁均吸放热,由于悬梁自身的热容,使得其截至频率较低。
发明内容
本发明的目的在于,提供了一种MEMS热式声粒子传感器结构,能测量三维空间的声粒子速度,降低双加热丝结构传感器的自噪声,提高传感器的高频性能。
本发明提供了一种MEMS热式声粒子传感器结构,该传感器包括由覆盖铂引线的横梁组成的左右两个正交平面的测量单元,为三层横梁结构。
上述声粒子传感器的结构,每个测量单元上层有两根横梁,中层有一根横梁,下层有两根横梁,上层和下层的四根横梁组成矩形,中层的横梁位于矩形中心。
上述声粒子传感器的结构,每个测量单元上层和下层的四根横梁作为感温电阻使用,中层的横梁作为加热电阻使用。
上述声粒子传感器的结构,三层结构由上下极板粘接而成,中间的悬梁来自上极板或下极板。
上述声粒子传感器的结构,三层结构的加工步骤包括:每个测量单元的上下极板的正、反两面各制作三根横梁,根据需要去掉上下极板中不需要的横梁,将上下极板粘接在一起。
相对于现有技术,本发明具有如下优点:
第一,本发明采用三线式流量测量原理,仅中间的横梁被加热,相比于两根悬梁都加热的结构,自噪声能得到有效的降低。
第二,本发明采用三线式流量测量原理,两侧的横梁温度远低于中间的加热横梁,横梁自身的比热对高频声波时热交换的影响减弱,进而传感器的高频特性得到提高。
附图说明
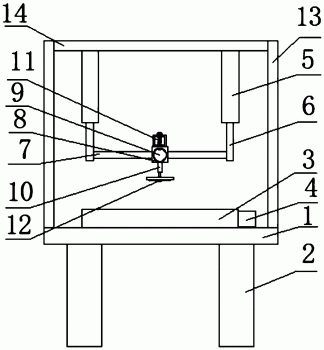
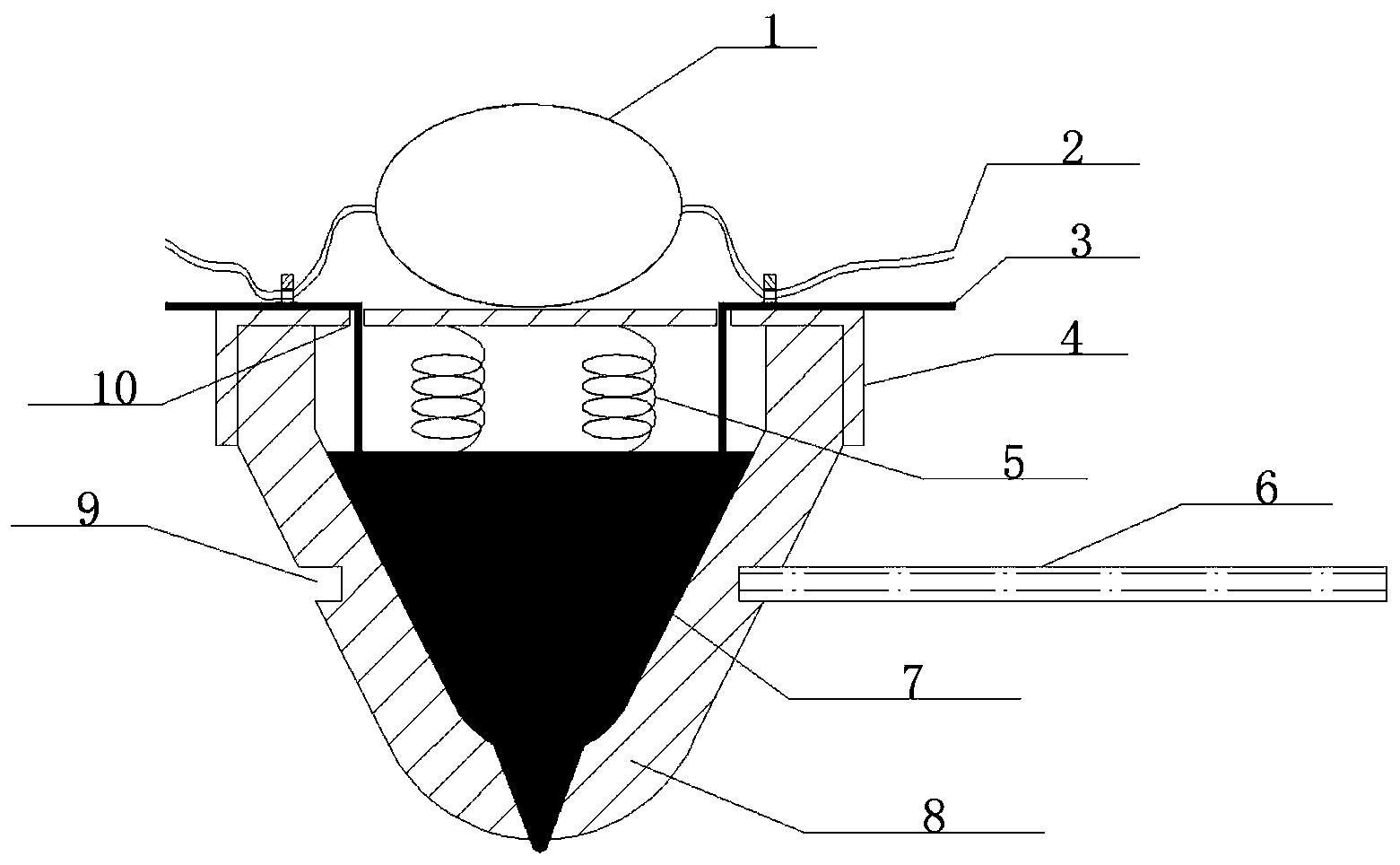
图1为本发明中MEMS热式声粒子传感器总体结构示意图(俯视图);
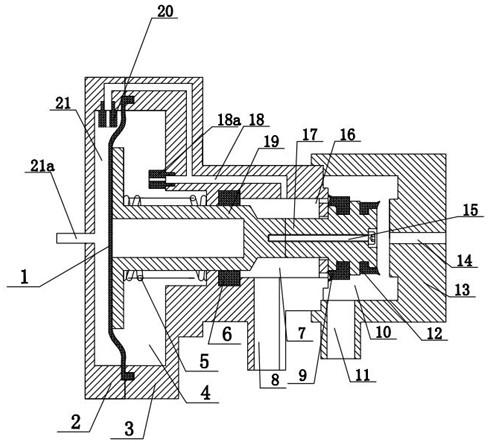
图2为本发明中MEMS热式声粒子传感器的单测量单元截面斜视图;
图3为本发明中MEMS热式声粒子传感器的横梁的材料结构图;
图4(a)为本发明中MEMS热式声粒子传感器的基本工艺流程——热氧化;
图4(b)为本发明中MEMS热式声粒子传感器的基本工艺流程——LPCVD Si3N4;
图4(c)为本发明中MEMS热式声粒子传感器的基本工艺流程——LPCVD SiO2;
图4(d)为本发明中MEMS热式声粒子传感器的基本工艺流程——光刻正面的横梁窗口;
图4(e)为本发明中MEMS热式声粒子传感器的基本工艺流程——RIE刻蚀出横梁结构;
图4(f)为本发明中MEMS热式声粒子传感器的基本工艺流程——光刻淀积金属的槽;
图4(g)为本发明中MEMS热式声粒子传感器的基本工艺流程——PVD金属引线和电阻;
图4(h)为本发明中MEMS热式声粒子传感器的基本工艺流程——同样的方法制作背面的横梁;
图4(i)为本发明中MEMS热式声粒子传感器的基本工艺流程——TMAH腐蚀释放;
图5为本发明中MEMS热式声粒子传感器的优化的PVD金属工艺示意图;
图6为本发明中MEMS热式声粒子传感器的硅各向同性腐蚀工艺优化示意图;
图7为本发明中MEMS热式声粒子传感器的工艺优化后形成的传感器单元示意图。
具体实施方式
为使本发明的上述目的,特征和优点能够更加明显易懂,下面结合附图及具体实施方式对本发明作进一步详细的说明。
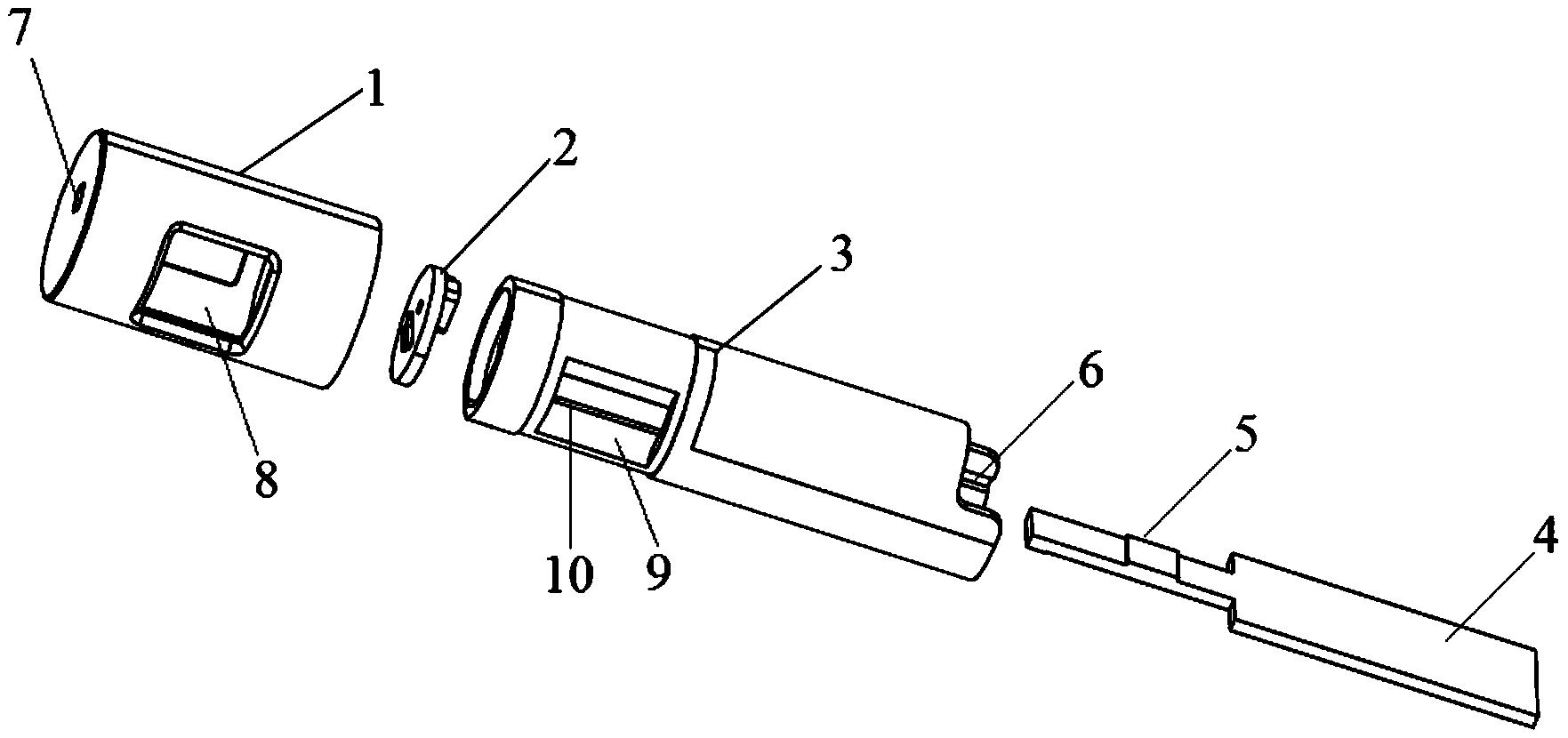
本发明设计的传感器为三层梁结构,其俯视图如图1所示,由上极板6和下极板7堆叠而成。两个极板又分别做了左右两个窗口(8和9),且每层都有相应的横梁的引线和焊盘(比如俯视图中可见的焊盘10至23),方便检测电路测量数据并数据处理。该传感器的测量单元共5根梁,中间层梁工艺方案的选择考虑的主要因素是中间加热梁的加工方法,直接加工三层梁结构比较困难,本发明采用间接加工的方式,用两片硅片分别加工上梁和中下梁,然后粘接在一起。上极板的正面制作两根梁,背面掏空;下级板的正面制作中间的加热梁,背面制作两根梁。下级板比上极板长,方便中间梁电极引出,同时下级板作为夹持端而预留一段夹持区域。
该三轴声粒子速度传感器包括左右两个正交的双轴声粒子速度传感器单元(图1中8和9),分别测量两个正交平面的声粒子速度,对于每一个测量单元,上层的两根梁和底层的两根梁围成一个正方体,中间的梁为加热电阻,对角的两根梁和中间的加热电阻组成一个测量对,测量对角线方向的声粒子速度。图2所示是该传感器的左测量单元的截面的斜视图。图2中梁3为加热电阻,梁1、2、4和5是测温电阻,梁1、3和5组成一个测量对,测量X方向的声粒子速度,梁2、3和4组成一个测量对,测量Y方向的声粒子速度,由几何关系得X方向与Y方向垂直,组成一个平面坐标系,从而可以测量该平面内任意方向的声粒子速度。
图3所示是本发明设计的横梁的材料结构。整个传感器最脆弱、最难加工的是横梁,横梁结构最常用的材料是氮化硅32。由于工艺条件限制,无法制备低应力氮化硅32,而且考虑到梁的长度太大,在氮化硅32下面热氧化一层二氧化硅31既可以缓冲氮化硅的部分应力,又能起支撑的作用。铂的电阻值与温度呈线性关系,被广泛应用于温度测量,又因其性质稳定不易被氧化,电阻率大,被广泛用做加热体。因此,选用铂35作为加热电阻和测温电阻。为了增加氮化硅32与金属(34和35)的粘附,在氮化硅32与金属(铬34和铂35)之间淀积一层很薄的二氧化硅31,同时也能与氮化硅32底层的二氧化硅31形成三明治结构,缓冲氮化硅32的应力。当然,横梁结构所采用的氮化硅材料也可能用金刚石、蓝宝石、碳化硅等其他材料替代,但是工艺上实现相对较难。
接下来介绍本发明采用的基本工艺流程。以下极板为例,极板正面加工两根悬梁,背面加工一根悬梁,基本工艺流程图如图4(a)至图4(i)所示。
首先,在基板30上热氧化,形成二氧化硅层31,如图4(a)所示。接着,采用低压化学气相沉积(LPCVD)工艺形成氮化硅层32,如图4(b)所示。再在氮化硅上LPCVD一层二氧化硅31,如图4(c)所示。然后,光刻显影形成正面的横梁窗口36,如图4(d)所示。然后,采用深离子刻蚀(RIE)工艺刻蚀出横梁结构37,如图4(e)所示。然后光刻出接下来要淀积的金属的槽38,如图4(f)所示。然后采用物理气相沉积(PVD)方法淀积金属引线和电阻39,形成待释放的横梁40,如图4(g)所示。采用同样的方法制作背面的横梁40,如图4(h)所示。然后用四甲基氢氧化铵(TMAH)释放横梁,释放后的基板41和横梁如图4(i)所示。
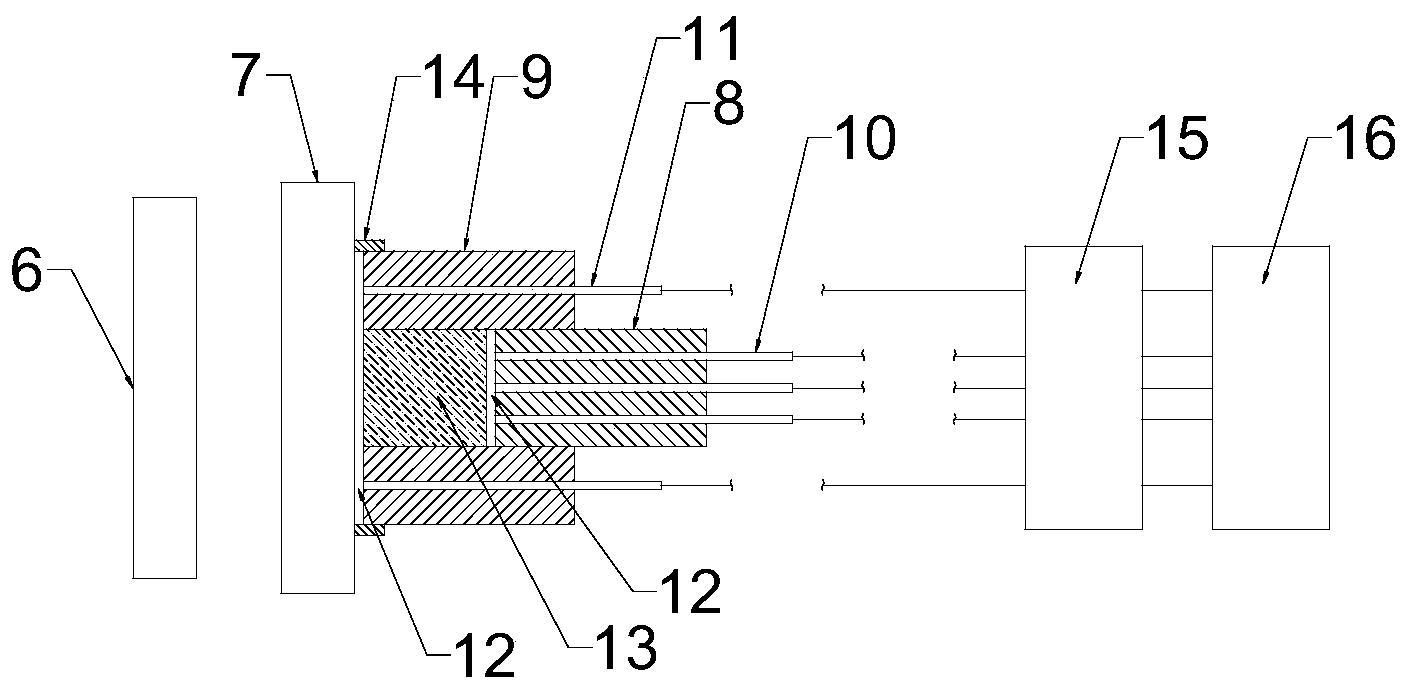
横梁金属的淀积和横梁的释放是传感器工艺中最关键的步骤。由于工艺条件限制,如果光刻的套准精度为±1μm,而悬梁的宽度仅为2μm,这将导致PVD在悬梁上的金属可能只有1μm宽。因此对金属淀积之前的光刻工艺步骤进行优化,PVD金属的光刻版线宽设计大于梁宽2μm,光刻完的示意图如图5所示,横梁两侧各留出3μm的间隙。
横梁厚度仅为 台阶高度较小,可能会有部分金属淀积在间隙底部的Si衬底上,进而与悬梁上的金属产生粘连。为了防止这种现象的产生,在刻蚀出横梁结构后,继续各向同性刻蚀硅衬底,横梁下面的Si衬底会被横钻一部分,形成一个弧形的槽42。这样横梁侧壁的金属会落到Si槽里面,不会形成粘连,示意图如图6所示。
从基本的工艺流程可以知道,上极板和下极板分别需要四次光刻共张光刻板,如果将两块极板做在一块硅片上,光刻板数量减半共4张。如果正反两面光刻图形相同且中心对称,可以将光刻板减少为2张,将正反不同的图形制成相同的图形只需要取它们的合集就能实现,即每面都是三根横梁单元40。全部工艺完成后,将不需要的横梁选择性的破坏即可,优化后的单元结构如图7所示。
另外,三轴声粒子速度传感器由两个上下极板粘接而成,为了避免胶的厚度导致悬梁的间距增加,采用侧面粘接的方式。上下极板对齐后,将环氧树脂胶均匀的涂在侧壁两极板的交汇处,烘干后得到三轴声粒子速度传感器探头。
以上对本发明所设计的一种MEMS热式声粒子传感器进行了详细介绍,对本发明的原理及实施方式进行了阐述,以上实施方式的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
一种MEMS热式声粒子传感器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0