








专利摘要
本发明公开了一种基于倒置式多波束回声仪的声速剖面反演方法,该方法包括以下步骤:将多波束回声仪倒置式安装于水下潜标或者固定于水底,通过发射换能器阵向水面发射波束,通过接收换能器阵接收回波信号;多波束回声仪根据接收到的回波信号获得回波的到达角和到达时间;根据声速剖面先验信息求解EOF,得到声速剖面的降维基函数描述方法;结合EOF、声线跟踪算法、表面声速以及多波束数据,建立优化模型;根据建立的优化模型、接收到的回波的到达时间和到达角以及表面声速,利用优化算法获得测量区域声速剖面的估计结果。进一步,利用声速剖面的估计值计算测量区域的水温剖面。本发明能够快速、准确地跟踪声速剖面及温度剖面的起伏变化。
权利要求
1.一种基于倒置式多波束回声仪的声速剖面反演方法,其特征是,包括如下步骤:
(1)将多波束回声仪倒置式安装于水下潜标或者固定于水底,通过发射换能器阵向水面发射波束,通过接收换能器阵接收回波信号;
(2)多波束回声仪根据接收到的回波信号,获得回波的到达角和到达时间;
(3)根据声速剖面先验信息,求解经验正交函数EOF,得到声速剖面的降维基函数描述方法:
某一时刻t,声速剖面可以表示为:
式(1)中,z表示深度;c
(4)声线跟踪算法:
由于海水的不均一性以及各向异性,声波在穿越不同声速层时会发生折射,从而导致声线弯曲;在非均匀介质条件下,假设声速只在垂直方向上变化,而在水平方向上是均匀的,声线传播遵循Snell定理:
式(2)中,c
则自换能器基阵发出的声线到达深度z处的传播时间t为:
且声线传播的水平距离r为:
式(5)中,z
由于海洋环境复杂多变,难以采用简单的连续函数表示声速剖面c(z);实测的声速剖面一般是由一些离散的测量点所组成,可以根据这些测量点的深度将整个水体分成若干层;具体为假设层内声速为常梯度变化进行声线跟踪计算;
首先,将水体沿深度方向分为N层,假设分层处的深度与声速值分别为z=[z
c(z)=c
其中,i表示层数(i=0,2,…,N-1),c
根据式(5)可知,第i层声线传播的水平距离可表示为:
则整个深度范围内,声线总的传播时间、水平距离与深度的关系可表示为:
式中,c(z)=c
(5)结合EOF、声线跟踪算法、表面声速以及多波束数据,建立优化模型:
式(11)中,K为权重系数,Toa
(6)根据步骤(5)建立的优化模型、步骤(2)中接收到的回波的到达角和到达时间以及接收换能器阵所在位置声速的测量值,利用优化算法获得EOF系数的反演值,进而利用式(1)获得声速剖面的估计结果。
2.根据权利要求1所述的基于倒置式多波束回声仪的声速剖面反演方法,其特征是,所述步骤(5)中,所述优化算法为模拟退火算法、爬山算法、粒子群算法、遗传算法、蚁群算法。
3.一种基于倒置式多波束回声仪的水温剖面反演方法,其特征是,包括如下步骤:
(1)将多波束回声仪倒置式安装于水下潜标或者固定于水底,通过发射换能器阵向水面发射波束,通过接收换能器阵接收回波信号;
(2)多波束回声仪根据接收到的回波信号,获得回波的到达角和到达时间;
(3)根据声速剖面先验信息,求解经验正交函数EOF,得到声速剖面的降维基函数描述方法:
某一时刻t,声速剖面可以表示为:
式(12)中,z表示深度;c
(4)声线跟踪算法:
由于海水的不均一性以及各向异性,声波在穿越不同声速层时会发生折射,从而导致声线弯曲;在非均匀介质条件下,假设声速只在垂直方向上变化,而在水平方向上是均匀的,声线传播遵循Snell定理:
式(13)中,c
则自换能器基阵发出的声线到达深度z处的传播时间为t:
且声线传播的水平距离r为:
式(16)中,z
由于海洋环境复杂多变,难以采用简单的连续函数表示声速剖面c(z);实测的声速剖面一般是由一些离散的测量点所组成,可以根据这些测量点的深度将整个水体分成若干层;具体为假设层内声速为常梯度变化进行声线跟踪计算;
首先,将水体沿深度方向分为N层,假设分层处的深度与声速值分别为z=[z
c(z)=c
式(17)中,i表示层数(i=0,2,…,N-1),c
根据式(16)可知,第i层声线传播的水平距离可表示为:
则整个深度范围内,声线总的传播时间、水平距离与深度的关系可表示为:
式中,c(z)=c
(5)结合EOF、声线跟踪算法、表面声速以及多波束数据,建立优化模型:
式(22)中,
(6)根据步骤(5)建立的优化模型、步骤(2)中接收到的回波的到达角和到达时间以及接收换能器阵所在位置声速的测量值,利用优化算法获得EOF系数的反演值,进而利用式(3)获得声速剖面的估计结果;
(7)根据步骤(6)的声速剖面的估计值计算测量区域的水温剖面。
4.根据权利要求3所述的基于倒置式多波束回声仪的水温剖面反演方法,其特征是,所述步骤(5)中,所述优化算法为模拟退火算法、爬山算法、粒子群算法、遗传算法、蚁群算法。
5.根据权利要求3或4所述的基于倒置式多波束回声仪的水温剖面反演方法,其特征是,所述步骤(6)中,采用Mackenzie声速公式、Chen-Millero-Li声速公式、Dell Grosso声速公式、Leroy声速公式、Wilson精确声速公式、Wilson简化声速公式或EM分层简化声速公式计算测量区域的水温剖面。
6.一种倒置式多波束回声仪测量系统,其特征包括:采用权利要求1或权利要求2所述的声速剖面反演方法。
7.一种倒置式多波束回声仪测量系统,其特征包括:采用权利要求3、权利要求4或权利要求5所述的水温剖面反演方法。
说明书
技术领域
本发明涉及的是水声测量和信号信息处理技术领域,具体涉及一种基于倒置式多波束回声仪的声速剖面反演方法。
背景技术
典型的海洋系统是一个由众多机理且相互作用的物理、声学、光学、生物、化学及地质过程组成的复杂系统,其内部存在着形式多样的动力过程。这些动力过程以及它们之间的耦合,加上与海床的相互作用,导致海洋内部的不均匀性以及时间与空间上的显著变化。在诸多环境参数中,声速剖面具有明显的时变特性,对声信号传播有重要影响,进而影响水声通信、定位、测绘等声纳系统的工作性能。海洋环境的有效测量技术一直受到关注,是当今水声研究的一个主要方向。
目前获得声速剖面的方式主要有两种,即测量方法与反演方法。直接测量法利用温盐深仪(CTD)通过逐点测量的方式获取声速剖面。这种方法虽然具有非常高的测量精度,但直接测量不仅费时费力,而且无法获取大范围海域动态变化的观测数据,难以满足实际应用的需求。近年来,声学反演技术通过将声传播模型与观测数据相结合,为获取感兴趣的环境参数提供了一种长期、快速、高效的方法,与传统方法相比具有很大的优势。
多波束回声仪在测量过程中,利用特殊的发射和接收波束结构,在一个较宽的范围内形成许多较窄的测量波束,从而一次性获得一个较宽范围内水体回声信息。多波速回声仪采用正交的“T”型的发射接收阵结构,发射阵沿船航行方向布置,形成纵向(沿航行方向)较窄横向(垂直航行方向)较宽的发射波束,形成一个测量条带;接收阵则横向布置,通过接收波束形成处理,形成许多横向较窄而纵向较宽的波束,接收波束与发射波束相交形成许多测量点(脚印),最后利用各个脚印回波的到达时间与角度计算出整个测量值。近几十年来,利用多波束回声仪的测深技术得到了快速发展,已成为水下勘测的主要手段之一,在海洋工程建设、资源开发、海图绘制、海洋研究与权益维护等方面起到了极为重要的作用。应用于测深时为保证测量精度,数据需经声速剖面修正,同时数据中也包含了声速剖面信息。利用多波束回声仪数据反演声速及温度等水文参数,在改进地形测量精度的同时获取水体环境信息,体现了垂直方向声场-动力的深度耦合关系。
倒置式回声仪长期固定布防于海底,通过测量声波在垂直方向传播时间的变化,反演温度、盐度等物理海洋学参量,可应用于大洋环流、中尺度涡旋、内波等深海观测。目前,倒置式回声仪采用单波束方式,通过最严经验模态方法(GEM-Gravest EmpiricalMode)得到海洋动力参数的剖面分布。在深海情况下,单波束方式的倒置式回声仪测量误差较大。同时,考虑到浅海复杂的温跃层结构与时空变化环境,单波束方式的倒置式回声仪应用受限。
寻找能够准确、快速地获得声速剖面时变特性的反演方法成为目前研究的重点。
发明内容
本发明的目的在于针对现有技术的不足,提供了一种基于倒置式多波束回声仪的声速剖面反演方法和基于倒置式多波束回声仪的水温剖面反演方法。
为实现上述目的,本发明所采取的其中一种技术方案是:基于倒置式多波束回声仪的声速剖面反演方法包括以下步骤:
(1)将多波束回声仪倒置式安装于水下潜标或者固定于水底,通过发射换能器阵向水面发射波束,通过接收换能器阵接收回波信号;
(2)多波束回声仪根据接收到的回波信号,获得回波的到达角和到达时间;
(3)根据声速剖面先验信息,求解经验正交函数(Empirical OrthogonalFunction-EOF),得到声速剖面的降维基函数描述方法:
某一时刻t,声速剖面可以表示为:
式(1)中,z表示深度;c0(z)表示深度z处的平均声速,Δc(z,t)表示扰动量;i表示EOF的阶数,1≤i≤I,I表示EOF的总阶数,αi(t)表示第i阶EOF系数,ψi(z)表示第i阶EOF;
(4)结合EOF、声线跟踪算法、表面声速以及多波束数据,建立优化模型:
式(2)中,K为权重系数,取[0,1];Toameas(t)为t时刻所有波束到达时间的实际测量数据,Toaest(t)为t时刻所有波束到达时间的估计值,c0meas(t)为t时刻多波束回声仪接收换能器阵所在位置声速的测量数据,c0est(t)为t时刻多波束回声仪接收换能器阵所在位置声速的估计值; 为测量算子,可根据声线跟踪算法进行计算,Doameas(t)为t时刻所有波束的到达方向测量值;
(5)根据步骤(4)建立的优化模型、步骤(2)中接收到的回波的到达角和到达时间以及接收换能器阵所在位置声速的测量值,利用优化算法获得EOF系数的反演值,进而利用式(1)获得声速剖面的估计结果。
进一步地,所述步骤(5)中,所述优化算法为模拟退火算法、爬山算法、粒子群算法、遗传算法、蚁群算法。
本发明所采取的另一种技术方案是:基于倒置式多波束回声仪的水温剖面反演方法包括如下步骤:
(1)将多波束回声仪倒置式安装于水下潜标或者固定于水底,通过发射换能器阵向水面发射波束,通过接收换能器阵接收回波信号;
(2)多波束回声仪根据接收到的回波信号,获得回波的到达角和到达时间;
(3)根据声速剖面先验信息,求解经验正交函数(Empirical OrthogonalFunction-EOF),得到声速剖面的降维基函数描述方法:
某一时刻t,声速剖面可以表示为:
式(3)中,z表示深度;c0(z)表示深度z处的平均声速,Δc(z,t)表示扰动量;i表示EOF的阶数,1≤i≤I,I表示EOF的总阶数,αi(t)表示第i阶EOF系数,ψi(z)表示第i阶EOF;
(4)结合EOF、声线跟踪算法、表面声速以及多波束数据,建立优化模型:
式(4)中,K为权重系数,取[0,1];Toameas(t)为t时刻所有波束到达时间的实际测量数据,Toaest(t)为t时刻所有波束到达时间的估计值,c0meas(t)为t时刻多波束回声仪接收换能器阵所在位置声速的测量数据,c0est(t)为t时刻多波束回声仪接收换能器阵所在位置声速的估计值; 为测量算子,可根据声线跟踪算法进行计算,Doameas(t)为t时刻所有波束的到达方向测量值;
(5)根据步骤(4)建立的优化模型、步骤(2)中接收到的回波的到达角和到达时间以及接收换能器阵所在位置声速的测量值,利用优化算法获得EOF系数的反演值,进而利用式(3)获得声速剖面的估计结果。
(6)根据步骤(5)的声速剖面的估计值计算测量区域的水温剖面。
进一步地,所述步骤(5)中,所述优化算法为模拟退火算法、爬山算法、粒子群算法、遗传算法、蚁群算法。
进一步地,所述步骤(6)中,采用Mackenzie声速公式、Chen-Millero-Li声速公式、Dell Grosso声速公式、Leroy声速公式、Wilson精确声速公式、Wilson简化声速公式或EM分层简化声速公式计算测量区域的水温剖面。
与现有技术相比,本发明的有益效果是:
(1)本发明方法直接利用倒置式多波束回声仪的测量数据(到达时间与到达角度)实现测量区域声速剖面估计,进一步可以获得测量区域的水温剖面,相比于直接投放CTD的方法更为快速;
(2)本发明采用倒置式多波束回声仪能够同时获得数十甚至上百个窄波束,相比于单波束回声仪,具有更高的海洋环境估计精度;
(3)本发明采用倒置式多波束回声仪实现环境参数(声速剖面及水温剖面)估计,可以坐底安装或安装于潜标、浮标上,在满足安全性的同时,可以实现对海洋环境的大范围、长时序、动态监测;
(4)本发明采用倒置式多波束回声仪安装于潜标上,可以实现潜标安装位置至水面环境参数估计,解决传统潜标无法测量海水表层水文参数的问题,对于潜标观测应用有极大助益。
附图说明
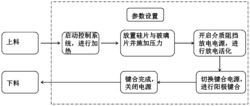
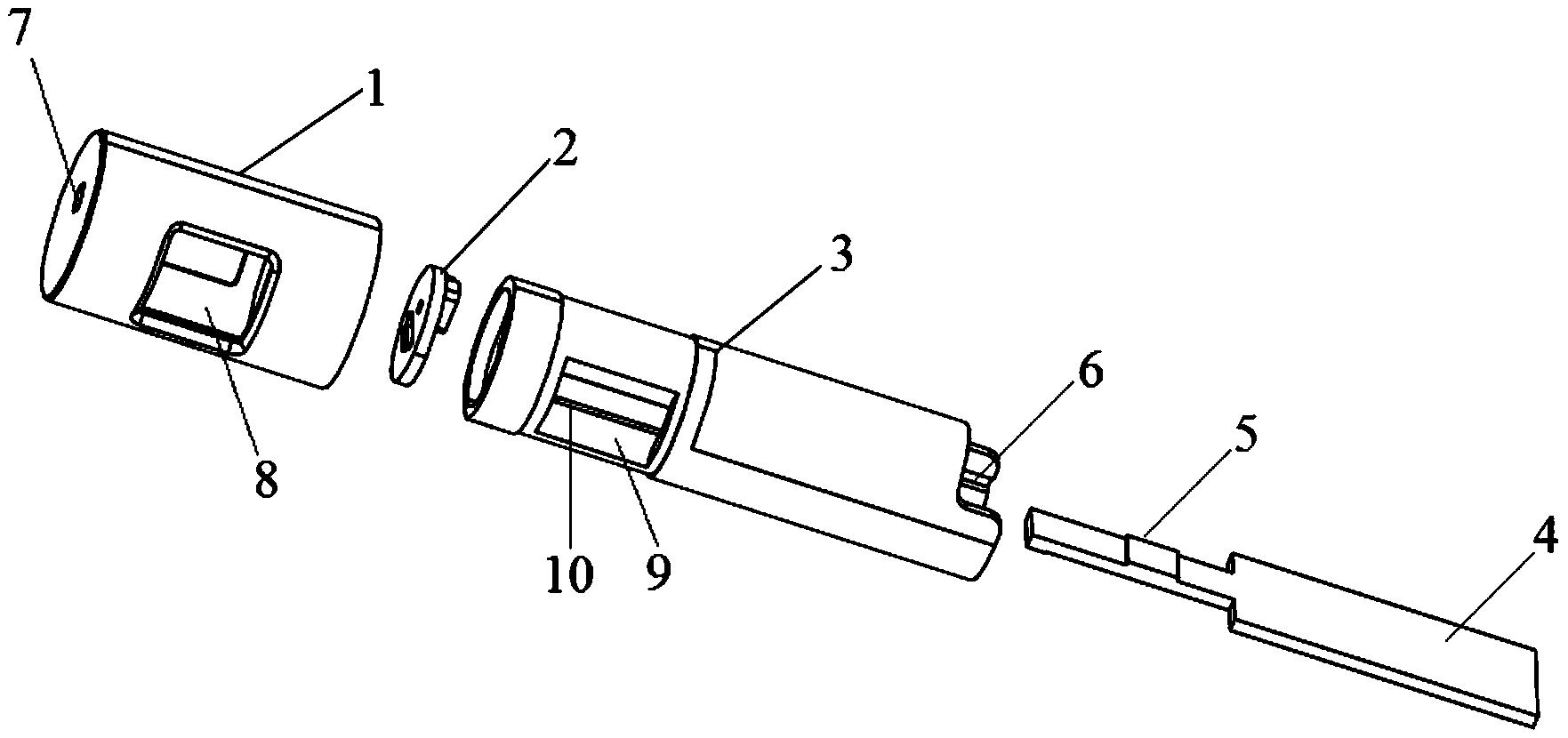
图1是多波束回声仪的结构框图;
图2是本发明反演方法的流程示意图;
图3是常声速声线跟踪法示意图;
图4是利用本发明反演方法所获得的声速剖面估计结果与真实值的比较图;
图5是利用本发明反演方法所获得的水温剖面估计结果与真实值的比较图。
具体实施方式
下面结合附图和实施例对本发明作进一步具体描述:
如图1所示,多波束回声仪包括:
发射电路:用于产生发射电信号。
发射换能器阵:用于将产生的发射电信号转化为声信号发射。
接收换能器阵:用于接收经过水体及水面反射、散射的回波,并将回波声信号转化为电信号。
接收电路:用于将接收换能器阵转换得到的电信号进行放大、滤波等预处理。
姿态传感器:用于实现多波束回声仪的姿态测定。
压力传感器:用于实现多波束回声仪的压力测定。
表面声速头:用于实现多波束回声仪安装位置的声速测定。
系统控制与信号处理系统:用于实现信号的高速采集和实时处理,并将采集的数据和处理结果通过网络传给显控与后处理平台,其中采集数据包括姿态传感器数据、压力传感器数据及表面声速数据,处理结果包括回波的到达角和到达时间。
显控与后处理平台:用于下达指令给系统控制与信号处理系统,并接收其处理结果和采集数据;在此基础上利用所建立的优化模型,实现声速剖面的反演,进一步,利用声速剖面的估计值计算测量区域的水温剖面。
本发明基于倒置式多波束回声仪的声速剖面反演方法的流程如图2所示,包括如下步骤:
(一)将多波束回声仪倒置式安装于水下潜标或者固定于水底,通过发射换能器阵向水面发射波束,通过接收换能器阵接收回波信号;
(二)多波束回声仪根据接收到的回波信号,获得回波的到达角和到达时间;
(三)根据声速剖面先验信息,求解EOF,得到声速剖面的降维基函数描述方法:
EOF可以根据测量海域的已知声速剖面样本集合进行计算。假定有M次实测声速剖面数据,如
式(5)中zi表示深度值。则可得到声速的确定量为
协方差矩阵为
最后,对协方差矩阵进行特征值分解,得到展开系数 和相对应的特征向量 这一组互相正交的向量即对应着EOF,即
(四)结合EOF、声线跟踪算法、表面声速以及多波束数据,建立优化模型:
优化模型中测量算子 可根据声线跟踪算法进行计算。
由于海水的不均匀性以及各向异性,声波在穿越不同声速层时会发生折射,从而导致声线弯曲,如图3所示。在非均匀介质条件下,假设声速只在垂直方向上变化,而在水平方向上是均匀的,声线传播遵循Snell定理:
式(8)中,c0表示换能器基阵位置处的声速,称之为表面声速;θ表示波束回波到达接收阵时与垂直方向的夹角;c(z)表示深度z处的声速,θ(z)表示深度z处声线切线与垂直方向的夹角。假设在很小的一段时间dt内,声线传播的水平距离dr、垂直距离dz以及路径长度ds满足
则自换能器基阵发出的声线到达深度z处的传播时间为:
且声线传播的水平距离为:
式(11)中,z0为换能器基阵深度。
由于海洋环境复杂多变,难以采用简单的连续函数表示声速剖面c(z)。根据这些实测声速剖面测量点的深度将整个水体分成若干层,如图3所示,并采用层内等梯度假设进行声线跟踪计算。
首先,将水体沿深度方向分为N层,假设分层处的深度与声速值分别为z=[z0,z1,…,zN]T和c=[c0,c1,…,cN]T,并假设层内声速常梯度,即:
c(z)=ci+gi(z-zi). (12)
式(12)中,i表示层数(i=0,2,…,N-1),ci表示第i层分界处的声速值,zi表示第i层的深度,gi表示第i层内的声速梯度, 根据式(10)可知,在层内常梯度假设下,第i层内声线的双程传播时间可表示为:
根据式(11)可知,第i层声线传播的水平距离可表示为:
则整个深度范围内,声线总的传播时间、水平距离与深度的关系可表示为:
在式(15)的基础上,得到优化模型式(2)中的测量算子
(五)根据上述建立的优化模型,通过网络将回波的到达角与到达时间数据以及采集的姿态、压力、表面声速数据传给显控与后处理平台,利用优化算法获得声速剖面基函数EOF的系数反演。
通常情况下,可采用模拟退火算法、爬山算法、粒子群算法、遗传算法、蚁群算法等优化算法实现待估参数的估计。图4给出了Matlab软件自带遗传算法的仿真实例。EOFs阶数为3阶。遗传算法的参数估计下限为[-100 -100 -100],估计上限为[100 100 100],种群数为200,迭代次数为100。由图4可以看出,采用本发明的方法估计出的声速剖面与真实剖面十分接近,整个剖面的均方误差为0.9726m/s,可见本发明方法估计效果良好。
(六)根据步骤(五)的声速剖面的估计值计算测量区域的水温剖面。
采用适用于测量区域的声速经验公式,根据步骤(五)中的声速剖面的估计结果,可进一步计算测量区域的水温剖面。目前被普遍认可的声速经验公式主要有Mackenzie声速公式、Chen-Millero-Li声速公式、Dell Grosso声速公式、Leroy声速公式、Wilson精确声速公式、Wilson简化声速公式或EM分层简化声速公式。其中,EM分层简化声速公式结构简单,计算精度高,且能够适用于海水盐度、深度或温度变化范围大的测量区域,是本发明的优选实施方式。
以下以EM分层简化声速公式为例进行水温剖面计算。
EM分层简化声速公式可以表示为:
表层声速计算公式为
淡水中深度达到200米、海水中深度达到1000米时声速计算公式为
c(T,z,S)=c(T,0,S)+16.5z. (18)
淡水中深度达到2000米、海水中深度达到11000米时声速计算公式为
深度大于5000米时,声速计算公式应考虑纬度改正:
式(17)-(21)中,T表示海水温度,z表示海水深度,S表示海水盐度, 表示所计算位置的纬度,c(T,z,S)表示当海水温度为T、海水深度为z、海水盐度为S时的声速,深度z单位为千米。
根据压力传感器数据即可知测量系统安放位置的深度,根据式(17)-(20)的海水深度适用范围,选择其中合适的一个进行水温剖面估计。由于仿真实例中系统安放在200米深度左右,所以选取式(17)进行测量区域水温剖面的估计,如图5所示。由图4可以看出,采用本发明的方法估计出的水温剖面与真实剖面十分接近,可见本发明方法估计效果良好。
上述实施例用来解释说明本发明,而不是对本发明进行限制,在本发明的精神和权利要求的保护范围内,对本发明作出的任何修改和改变,都落入本发明的保护范围。
基于倒置式多波束回声仪的声速剖面反演方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0