







专利摘要
本发明属于工程监理技术领域,具体的说是一种基于VR技术的工程监理系统,包括监控系统、控制系统、VR眼镜、信号处理系统,监控系统用于对现场进行监控并将数据实时输送至信号处理系统,控制系统用于对监控系统进行控制,信号处理系统用于接受并处理监控系统输送的信号,所述监控系统包括支撑座;本发明通过可升降的支撑座带动无人机和摄像头沿着建筑物上下移动,使得监理的范围得到扩大,且在无人机移动的过程中对无人机进行无线充电,保证了无人机的续航能力,使得无人机能够进行长时间的工作,提高了监理的效率,并且通过VR技术来对现场进行查看,使得监理的效果更佳突出,便于监理人员对现场做出合理的安排,有助于工程的进展。
权利要求
1.一种基于VR技术的工程监理系统,其特征在于:包括监控系统、控制系统、VR眼镜、信号处理系统,监控系统用于对现场进行监控并将数据实时输送至信号处理系统,控制系统用于对监控系统进行控制,信号处理系统用于接受并处理监控系统输送的信号,所述监控系统包括支撑座(1),所述支撑座(1)顶端固定有驱动电机(2),所述驱动电机(2)为双轴电机,所述驱动电机(2)的两个输出轴端均固定有主动链轮(3),所述支撑座(1)顶端转动安装有两个从动链轮(4),相邻的所述主动链轮(3)和从动链轮(4)之间设有链条(5),所述主动链轮(3)、从动链轮(4)均和链条(5)互相啮合,所述链条(5)的顶端固定有V字形的安装架(6),所述安装架(6)的底端转动安装有转轴(7),所述转轴(7)的底端固定有安装座(8),所述支撑座(1)底端固定有无线充电模块(9),所述无线充电模块(9)底端设有无人机(10),所述无人机(10)上固定有支架(11),所述支架(11)的顶端固定有真空吸盘(12),所述真空吸盘(12)与无人机(10)电性连接,所述真空吸盘(12)吸附在无线充电模块(9)的底端,所述无线充电模块(9)用于对无人机(10)充电,所述无人机(10)上设有信号处理器,所述无人机(10)的底端固定有支撑腿和摄像头(13),所述信号处理器和摄像头(13)电性连接。
2.根据权利要求1所述的一种基于VR技术的工程监理系统,其特征在于:所述支撑座(1)顶端固定有两个矩形板(14),所述矩形板(14)上设有通孔,通孔处滑动安装有一号杆(15),所述一号杆(15)靠近驱动电机(2)的一端固定有一号盘(16),所述一号杆(15)远离驱动电机(2)的一端固定有螺旋桨(17),所述螺旋桨(17)和相邻的矩形板(14)之间设有复位弹簧(18),所述复位弹簧(18)缠绕设置在一号杆(15)表面,所述矩形板(14)顶端设有电磁铁(19),所述电磁铁(19)用于控制螺旋桨(17)的位置。
3.根据权利要求2所述的一种基于VR技术的工程监理系统,其特征在于:两根所述链条(5)的底端均固定有配重块(20),两个所述配重块(20)之间设有连接板(21),所述配重块(20)用于提高链条(5)的稳定性。
4.根据权利要求3所述的一种基于VR技术的工程监理系统,其特征在于:所述连接板(21)顶端设有两个以上的挡风板(22),所述挡风板(22)用于提高配重块(20)的稳定性,所述挡风板(22)呈弧形结构,两个以上的挡风板(22)首尾相连构成封闭图形,所述挡风板(22)的圆心位于封闭图形的外部。
5.根据权利要求4所述的一种基于VR技术的工程监理系统,其特征在于:所述连接板(21)底端固定有伸缩杆,所述伸缩杆的底端固定有接地板(23),所述支撑座(1)的底端固定有一号板(24),所述一号板(24)的侧壁上转动安装有二号杆(25),所述一号板(24)侧壁上设有制动模块(26),所述制动模块(26)用于控制二号杆(25)的转动,所述二号杆(25)远离一号板(24)的一端固定有绕卷筒(27),所述绕卷筒(27)上缠绕设置有卷绳(28),所述卷绳(28)的底端固定在接地板(23)的顶端,所述支撑板侧壁上固定有支架(11),所述支架(11)顶端固定有二号板(29),所述二号板(29)上转动安装有三号杆(30),所述三号杆(30)和绕卷筒(27)之间设有同步带(31),所述三号杆(30)靠近驱动电机(2)的一端设为方形,所述三号杆(30)靠近驱动电机(2)的一端滑动安装有滑块(32),所述滑块(32)与二号板(29)之间设有限位弹簧(33),所述限位弹簧(33)用于控制滑块(32)的位置,所述滑块(32)采用铁质材料制成,所述三号杆(30)与一号杆(15)同心。
6.根据权利要求5所述的一种基于VR技术的工程监理系统,其特征在于:所述接地板(23)采用硅胶材料制成,所述接地板(23)内填充有铁块。
说明书
技术领域
本发明属于工程监理技术领域,具体的说是一种基于VR技术的工程监理系统。
背景技术
虚拟现实技术又称“灵境技术”、“虚拟环境”、“赛伯空间”,英文名为VirtualReality,简称VR技术。虚拟现实技术是一种综合应用计算机图形学,人机接口技术,传感器技术以及人工智能等技术,制造出逼真的人工模拟环境,并能有效地模拟人在自然环境中的各种感知的高级的人机交互技术。
工程监理是指具有相关资质的监理单位受甲方的委托,依据国家批准的工程项目建设文件、有关工程建设的法律、法规和工程建设监理合同及其他工程建设合同,代表甲方对乙方的工程建设实施监控的一种专业化服务活动。工程监理是一种有偿的工程咨询服务;是受甲方委托进行的;监理的主要依据是法律、法规、技术标准、相关合同及文件;监理的准则是守法、诚信、公正和科学;监理目的是确保工程建设质量和安全,提高工程建设水平,充分发挥投资效益。
现有技术中也出现了一些关于工程监理的技术方案,如申请号为CN201810822160.2的一项中国专利,该专利公开了工程监理中施工质量的监理方法,该方法只需少量监理人员负责原材料进入工地前捆绑信号发生器、控制无人机以及处理无人机反馈的数据,使得所需人手较少,同时能及时发现问题,保证监理质量的同时提高了监理效率,但是无人机在工作的过程中续航能力较短,使得无人机的检查时间较短,且无法大范围的检测,使得检测效率得不到保证,尤其对于高层施工来说无法检查到高处的施工状况,从而使得监理工作具有局限性。
据此,本发明提出了一种基于VR技术的工程监理系统,通过可升降的支撑座带动无人机和摄像头沿着建筑物上下移动,使得监理的范围得到扩大,且在无人机移动的过程中对无人机进行无线充电,保证了无人机的续航能力,使得无人机能够进行长时间的工作,提高了监理的效率,并且通过VR技术来对现场进行查看,使得监理的效果更佳突出,便于监理人员对现场做出合理的安排,有助于工程的进展。
发明内容
为了弥补现有技术的不足,本发明提出的一种基于VR技术的工程监理系统,通过可升降的支撑座带动无人机和摄像头沿着建筑物上下移动,使得监理的范围得到扩大,且在无人机移动的过程中对无人机进行无线充电,保证了无人机的续航能力,使得无人机能够进行长时间的工作,提高了监理的效率,并且通过VR技术来对现场进行查看,使得监理的效果更佳突出,便于监理人员对现场做出合理的安排,有助于工程的进展。
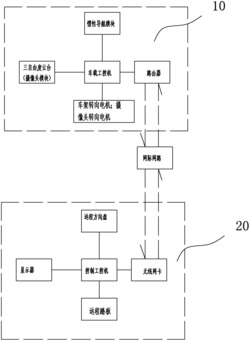
本发明解决其技术问题所采用的技术方案是:本发明所述的一种基于VR技术的工程监理系统,包括监控系统、控制系统、VR眼镜、信号处理系统,监控系统用于对现场进行监控并将数据实时输送至信号处理系统,控制系统用于对监控系统进行控制,信号处理系统用于接受并处理监控系统输送的信号,所述监控系统包括支撑座,所述支撑座顶端固定有驱动电机,所述驱动电机为双轴电机,所述驱动电机的两个输出轴端均固定有主动链轮,所述支撑座顶端转动安装有两个从动链轮,相邻的所述主动链轮和从动链轮之间设有链条,所述主动链轮、从动链轮均和链条互相啮合,所述链条的顶端固定有V字形的安装架,所述安装架的底端转动安装有转轴,所述转轴的底端固定有安装座,所述支撑座底端固定有无线充电模块,所述无线充电模块底端设有无人机,所述无人机上固定有支架,所述支架的顶端固定有真空吸盘,所述真空吸盘与无人机电性连接,所述真空吸盘吸附在无线充电模块的底端,所述无线充电模块用于对无人机充电,所述无人机上设有信号处理器,所述无人机的底端固定有支撑腿和摄像头,所述信号处理器和摄像头电性连接;工作时,现有工程监理用到无人机替代人工进行监理工作,但是无人机在工作的过程中续航能力较短,使得无人机的检查时间较短,且无法大范围的检测,使得检测效率得不到保证,尤其对于高层施工来说无法检查到高处的施工状况,从而使得监理工作具有局限性,本发明对这一问题进行了解决;将安装座固定安装在施工楼层的顶部中心位置,使得安装架与地面平行,通过控制安装架的长度使得链条从楼层的边缘垂下并且与楼层之间具有间距;在进行监理工作时通过控制系统控制驱动电机,使得驱动电机带动两个主动链轮转动,因相邻的主动链轮和从动链轮与链条啮合,主动链轮在转动的同时在链条表面滚动,从而使得主动链轮能够沿着链条产生向上或者向下的移动,主动链轮带动支撑座沿着链条产生移动,从而使得监控系统产生位移;监控系统在移动的同时使得无人机以及摄像头的位置产生移动,从而使得摄像头可以对不同楼层的施工状况进行监视;摄像头拍下的视频通过信号处理器输送至信号处理系统,信号处理系统对信号进行处理后输送给VR眼镜,使用者可通过佩戴VR眼镜虚拟查看现场的施工情况;在摄像头具有死角时启动无人机,通过控制系统对无人机进行控制,使得无人机能够飞进建筑物进行查看,无人机上设有真空发生器,真空发生器通过管道与真空吸盘连接,真空发生器将真空吸盘内的气体抽出,使得真空吸盘可吸附在楼顶或者其他物体上,使得无人机不需要一直飞行,从而提高了无人机的续航能力;在无人机电量不足时回到初始位置,真空吸盘将无人机吸附在无线充电模块的底端,且无线充电模块对无人机进行无线充电;通过人工转动转轴带动安装架转动,使得链条上安装的一系列结构同步转动,从而使得摄像头沿着建筑物周向转动,摄像头对建筑物进行全方位的监控,提高了监理的全面性;本发明通过可升降的支撑座带动无人机和摄像头沿着建筑物上下移动,使得监理的范围得到扩大,且在无人机移动的过程中对无人机进行无线充电,保证了无人机的续航能力,使得无人机能够进行长时间的工作,提高了监理的效率,并且通过VR技术来对现场进行查看,使得监理的效果更佳突出,便于监理人员对现场做出合理的安排,有助于工程的进展。
优选的,所述支撑座顶端固定有两个矩形板,所述矩形板上设有通孔,通孔处滑动安装有一号杆,所述一号杆靠近驱动电机的一端固定有一号盘,所述一号杆远离驱动电机的一端固定有螺旋桨,所述螺旋桨和相邻的矩形板之间设有复位弹簧,所述复位弹簧缠绕设置在一号杆表面,所述矩形板顶端设有电磁铁,所述电磁铁用于控制螺旋桨的位置;工作时,通过人工转动转轴的方式较为麻烦,且浪费人工;通过设置有电磁铁,在需要改变摄像头的横向拍摄位置时控制系统控制单边的电磁铁工作,使得电磁铁对螺旋桨产生吸力,从而使得螺旋桨朝向驱动电机的方向移动;螺旋桨在移动的同时带动一号杆移动,使得一号杆上的一号盘靠近相邻的主动链轮并贴在主动链轮上,从而使得一号盘与主动链轮之间产生较大的摩擦力;同时驱动电机带动主动链轮转动,使得主动链轮通过摩擦力带动一号盘转动,从而使得一号杆和螺旋桨转动;螺旋桨转动的同时产生推力使得支撑座沿着建筑物做周向转动,从而使得摄像头能够沿着建筑物的外围转动,进而使得摄像头的监控视角更加全面;通过控制不同的电磁铁使得摄像头的位置产生左右的改变,在电磁铁停止工作后复位弹簧带动一号杆回到原位,使得一号盘和主动链轮分离,从而使得摄像头停止横向的移动;通过电磁铁的设置使得摄像头的位置能够方便快捷的得到改变,不需要人工调节转轴,提高了工作效率,同时使得监理工作效率得到保证。
优选的,两根所述链条的底端均固定有配重块,两个所述配重块之间设有连接板,所述配重块用于提高链条的稳定性;工作时,在支撑座横向移动后使得链条的底部产生摆动,从而产生晃动,使得支撑座产生摇摆,不利于摄像头的拍摄,且在有风的天气时也容易使得摄像头产生摆动;通过设置有配重块使得链条的底部受到拉力,从而使得链条保持笔直的状态,有利于主动链轮在链条表面的移动;且配重块的设置使得链条的摆动幅度减小,且摆动的频率也降低,进一步的提高了链条的稳定性;连接板的设置使得两个配重块始终保持初始的距离,从而使得两根链条之间缠绕的几率降低,保证了支撑座的顺利移动。
作为本发明的一种具体实施方式,所述连接板顶端设有两个以上的挡风板,所述挡风板用于提高配重块的稳定性,所述挡风板呈弧形结构,两个以上的挡风板首尾相连构成封闭图形,所述挡风板的圆心位于封闭图形的外部;工作时,通过设置有挡风板,在配重块晃动的过程中使得挡风板同步移动,挡风板移动的过程中受到风的阻力较大,从而使得挡风板移动受阻;挡风板移动受阻使得配重块移动受阻,从而使得配重块的晃动幅度得到降低,进而使得配重块能够快速的稳定下来,继而保证了摄像头的稳定性;挡风板构成封闭图形使得配重块朝任意方向的晃动都能够受到风阻的影响,从而使得配重块能够快速的停止晃动。
优选的,所述连接板底端固定有伸缩杆,所述伸缩杆的底端固定有接地板,所述支撑座的底端固定有一号板,所述一号板的侧壁上转动安装有二号杆,所述一号板侧壁上设有制动模块,所述制动模块用于控制二号杆的转动,所述二号杆远离一号板的一端固定有绕卷筒,所述绕卷筒上缠绕设置有卷绳,所述卷绳的底端固定在接地板的顶端,所述支撑板侧壁上固定有支架,所述支架顶端固定有二号板,所述二号板上转动安装有三号杆,所述三号杆和绕卷筒之间设有同步带,所述三号杆靠近驱动电机的一端设为方形,所述三号杆靠近驱动电机的一端滑动安装有滑块,所述滑块与二号板之间设有限位弹簧,所述限位弹簧用于控制滑块的位置,所述滑块采用铁质材料制成,所述三号杆与一号杆同心;工作时,在风力较大时容易使得配重块产生摆动,从而使得链条产生大幅度的晃动,进而使得摄像头产生晃动,影响到拍摄的质量;通过设置有接地板,接地板与地面接触,使得接地板与地面具有较大的摩擦力,摩擦力使得接地板在地面上移动受阻,从而使得配重块移动受阻;在对摄像头的横向位置进行调节时电磁铁的吸力增大,使得滑块朝向螺旋桨的方向移动并且与螺旋桨表面贴合;滑块与螺旋桨表面接触后产生摩擦力,螺旋桨通过摩擦力带动滑块转动,从而使得滑块产生转动;滑块转动的过程中带动三号杆转动,使得三号杆上的同步带产生转动,从而使得绕卷筒转动;绕卷筒转动使得卷绳受到牵引,从而使得接地板被向上拉起与地面脱离;接地板脱离地面后使得配重块可自由移动,在接地板离地后制动模块限制二号杆的转动,使得二号杆停止转动,此处的制动模块采用常规技术在此不做赘述,同时电磁铁在控制系统的控制下减小对滑块的吸力,使得滑块在限位弹簧的作用下与螺旋桨脱离,从而使得三号杆以及同步带停止转动;螺旋桨继续转动带动摄像头改变位置,在摄像头到达指定位置后制动模块停止对二号杆的限位,使得二号杆自由转动,接地板在重力的作用下掉落到地面上重新对配重块进行限位,使得配重块的晃动幅度得到控制,从而使得摄像头的稳定性得到保证,使得监理工作效率提高。
优选的,所述接地板采用硅胶材料制成,所述接地板内填充有铁块;工作时,接地板采用硅胶材料使得接地板较为柔软,从而使得接地板与地面接触时与地面的接触面积增大,避免因地面凹坑造成接地板与地面接触不良而导致接地板在地面上滑动的情况发生,进而提高了接地板对配重块的稳定作用;接地板内填充铁块使得接地板的重量增大,从而使得接地板与地面之间的摩擦力增大,进一步的提高了配重块的稳定性,也使得摄像头更加的稳定。
本发明的有益效果如下:
1.本发明所述的一种基于VR技术的工程监理系统,通过可升降的支撑座带动无人机和摄像头沿着建筑物上下移动,使得监理的范围得到扩大,且在无人机移动的过程中对无人机进行无线充电,保证了无人机的续航能力,使得无人机能够进行长时间的工作,提高了监理的效率,并且通过VR技术来对现场进行查看,使得监理的效果更加突出,便于监理人员对现场做出合理的安排,有助于工程的进展。
2.本发明所述的一种基于VR技术的工程监理系统,通过配重块和接地板的设置提高了链条的稳定性,从而使得摄像头在工作的过程中晃动减少,避免因晃动造成的摄像不清晰问题,从而保证了监理的正常进行。
附图说明
下面结合附图对本发明作进一步说明。
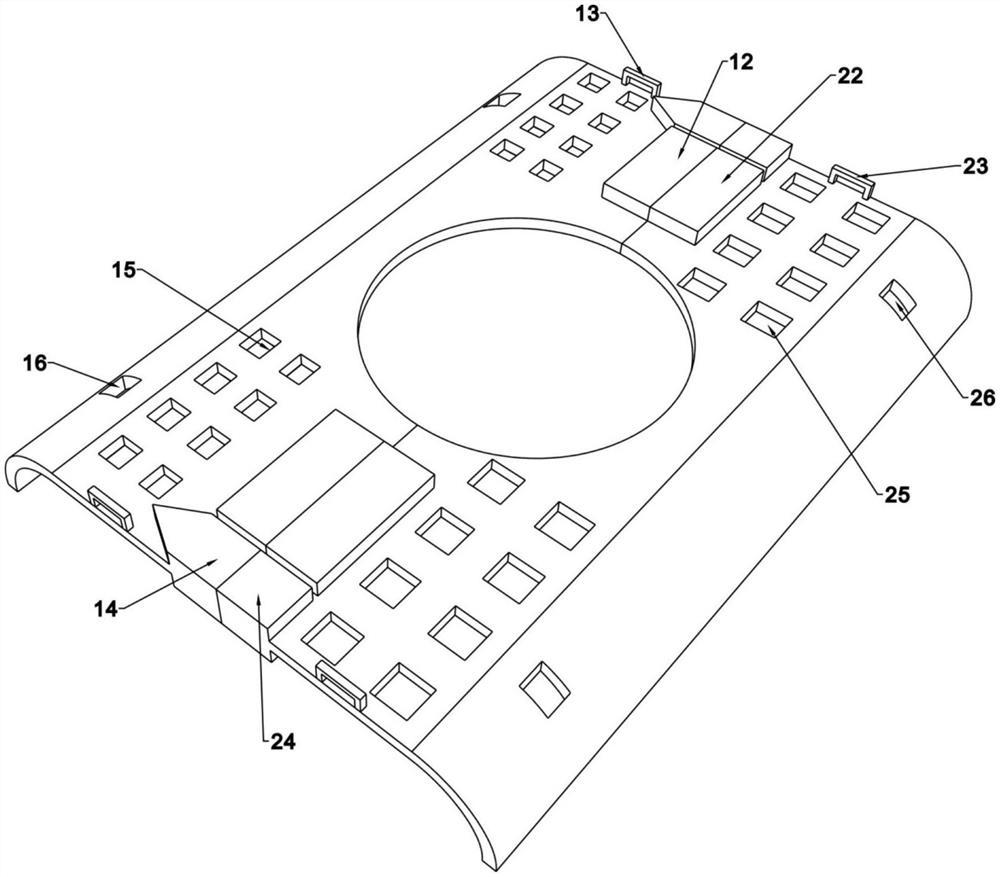
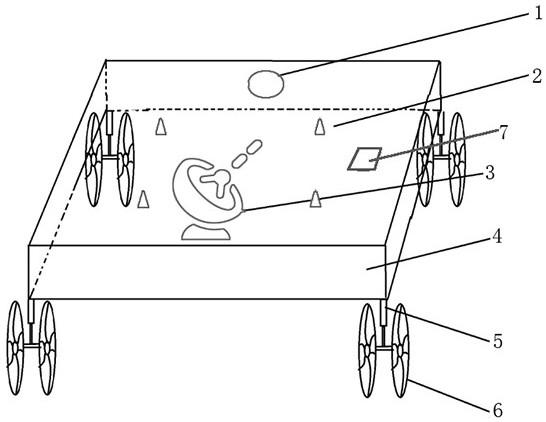
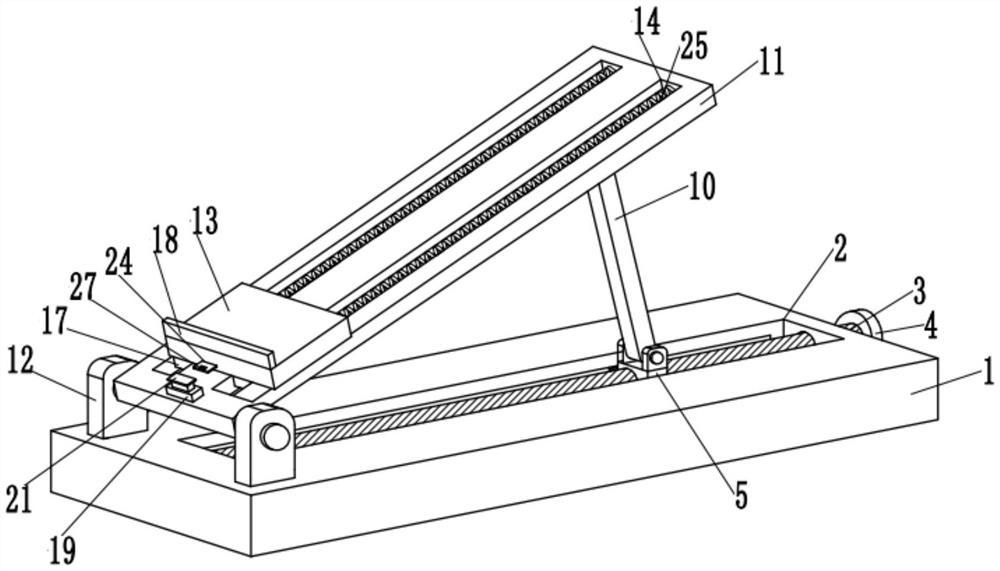
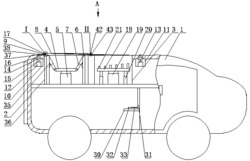
图1是本发明中监控系统的三维图;
图2是图1中A处局部放大图;
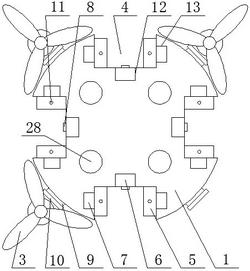
图3是本发明中监控系统的工作状态示意图;
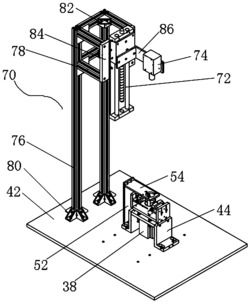
图4是主动链轮和链条的位置关系示意图;
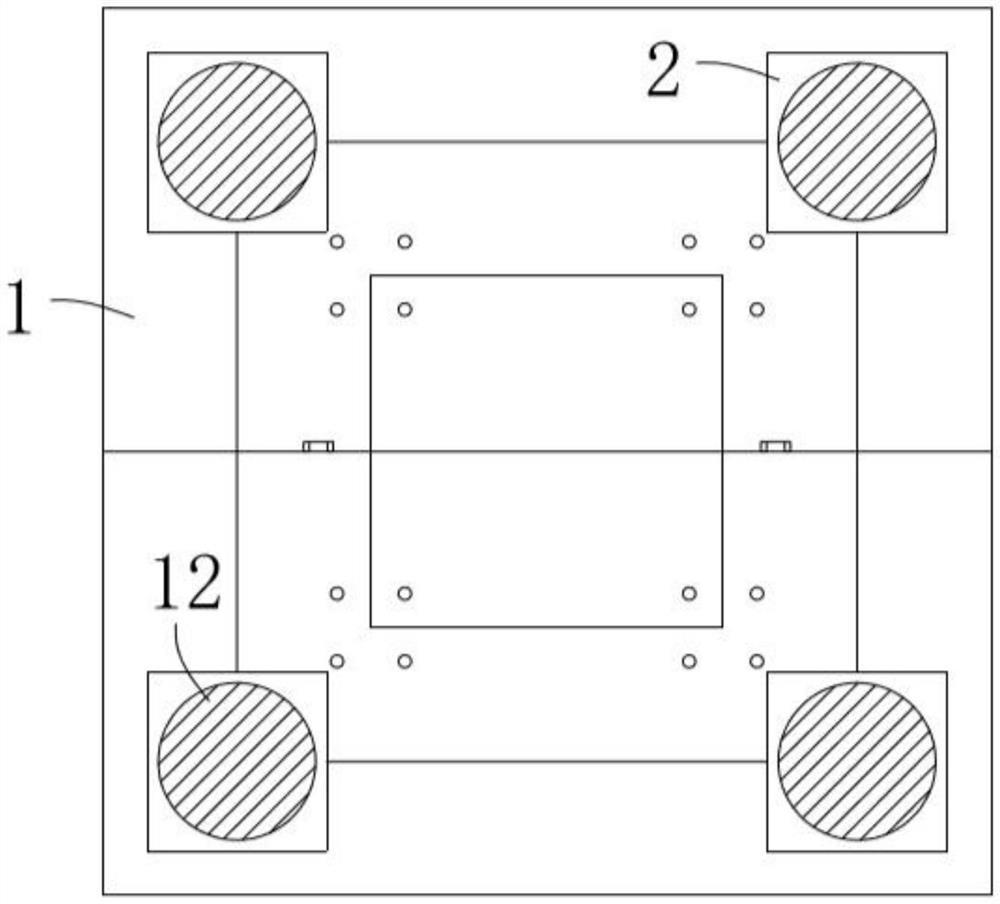
图中:1、支撑座;2、驱动电机;3、主动链轮;4、从动链轮;5、链条;6、安装架;7、转轴;8、安装座;9、无线充电模块;10、无人机;11、支架;12、真空吸盘;13、摄像头;14、矩形板;15、一号杆;16、一号盘;17、螺旋桨;18、复位弹簧;19、电磁铁;20、配重块;21、连接板;22、挡风板;23、接地板;24、一号板;25、二号杆;26、制动模块;27、绕卷筒;28、卷绳;29、二号板;30、三号杆;31、同步带;32、滑块;33、限位弹簧。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1至图4所示,本发明所述的一种基于VR技术的工程监理系统,包括监控系统、控制系统、VR眼镜、信号处理系统,监控系统用于对现场进行监控并将数据实时输送至信号处理系统,控制系统用于对监控系统进行控制,信号处理系统用于接受并处理监控系统输送的信号,所述监控系统包括支撑座1,所述支撑座1顶端固定有驱动电机2,所述驱动电机2为双轴电机,所述驱动电机2的两个输出轴端均固定有主动链轮3,所述支撑座1顶端转动安装有两个从动链轮4,相邻的所述主动链轮3和从动链轮4之间设有链条5,所述主动链轮3、从动链轮4均和链条5互相啮合,所述链条5的顶端固定有V字形的安装架6,所述安装架6的底端转动安装有转轴7,所述转轴7的底端固定有安装座8,所述支撑座1底端固定有无线充电模块9,所述无线充电模块9底端设有无人机10,所述无人机10上固定有支架11,所述支架11的顶端固定有真空吸盘12,所述真空吸盘12与无人机10电性连接,所述真空吸盘12吸附在无线充电模块9的底端,所述无线充电模块9用于对无人机10充电,所述无人机10上设有信号处理器,所述无人机10的底端固定有支撑腿和摄像头13,所述信号处理器和摄像头13电性连接;工作时,现有工程监理用到无人机替代人工进行监理工作,但是无人机在工作的过程中续航能力较短,使得无人机的检查时间较短,且无法大范围的检测,使得检测效率得不到保证,尤其对于高层施工来说无法检查到高处的施工状况,从而使得监理工作具有局限性,本发明对这一问题进行了解决;将安装座8固定安装在施工楼层的顶部中心位置,使得安装架6与地面平行,通过控制安装架6的长度使得链条5从楼层的边缘垂下并且与楼层之间具有间距;在进行监理工作时通过控制系统控制驱动电机2,使得驱动电机2带动两个主动链轮3转动,因相邻的主动链轮3和从动链轮4与链条5啮合,主动链轮3在转动的同时在链条5表面滚动,从而使得主动链轮3能够沿着链条5产生向上或者向下的移动,主动链轮3带动支撑座1沿着链条5产生移动,从而使得监控系统产生位移;监控系统在移动的同时使得无人机10以及摄像头13的位置产生移动,从而使得摄像头13可以对不同楼层的施工状况进行监视;摄像头13拍下的视频通过信号处理器输送至信号处理系统,信号处理系统对信号进行处理后输送给VR眼镜,使用者可通过佩戴VR眼镜虚拟查看现场的施工情况;在摄像头13具有死角时启动无人机10,通过控制系统对无人机10进行控制,使得无人机10能够飞进建筑物进行查看,无人机10上设有真空发生器,真空发生器通过管道与真空吸盘12连接,真空发生器将真空吸盘12内的气体抽出,使得真空吸盘12可吸附在楼顶或者其他物体上,使得无人机10不需要一直飞行,从而提高了无人机10的续航能力;在无人机10电量不足时回到初始位置,真空吸盘12将无人机10吸附在无线充电模块9的底端,且无线充电模块9对无人机10进行无线充电;通过人工转动转轴7带动安装架6转动,使得链条5上安装的一系列结构同步转动,从而使得摄像头13沿着建筑物周向转动,摄像头13对建筑物进行全方位的监控,提高了监理的全面性;本发明通过可升降的支撑座1带动无人机10和摄像头13沿着建筑物上下移动,使得监理的范围得到扩大,且在无人机10移动的过程中对无人机10进行无线充电,保证了无人机10的续航能力,使得无人机10能够进行长时间的工作,提高了监理的效率,并且通过VR技术来对现场进行查看,使得监理的效果更佳突出,便于监理人员对现场做出合理的安排,有助于工程的进展。
作为本发明的一种具体实施方式,所述支撑座1顶端固定有两个矩形板14,所述矩形板14上设有通孔,通孔处滑动安装有一号杆15,所述一号杆15靠近驱动电机2的一端固定有一号盘16,所述一号杆15远离驱动电机2的一端固定有螺旋桨17,所述螺旋桨17和相邻的矩形板14之间设有复位弹簧18,所述复位弹簧18缠绕设置在一号杆15表面,所述矩形板14顶端设有电磁铁19,所述电磁铁19用于控制螺旋桨17的位置;工作时,通过人工转动转轴7的方式较为麻烦,且浪费人工;通过设置有电磁铁19,在需要改变摄像头13的横向拍摄位置时控制系统控制单边的电磁铁19工作,使得电磁铁19对螺旋桨17产生吸力,从而使得螺旋桨17朝向驱动电机2的方向移动;螺旋桨17在移动的同时带动一号杆15移动,使得一号杆15上的一号盘16靠近相邻的主动链轮3并贴在主动链轮3上,从而使得一号盘16与主动链轮3之间产生较大的摩擦力;同时驱动电机2带动主动链轮3转动,使得主动链轮3通过摩擦力带动一号盘16转动,从而使得一号杆15和螺旋桨17转动;螺旋桨17转动的同时产生推力使得支撑座1沿着建筑物做周向转动,从而使得摄像头13能够沿着建筑物的外围转动,进而使得摄像头13的监控视角更加全面;通过控制不同的电磁铁19使得摄像头13的位置产生左右的改变,在电磁铁19停止工作后复位弹簧18带动一号杆15回到原位,使得一号盘16和主动链轮3分离,从而使得摄像头13停止横向的移动;通过电磁铁19的设置使得摄像头13的位置能够方便快捷的得到改变,不需要人工调节转轴7,提高了工作效率,同时使得监理工作效率得到保证。
作为本发明的一种具体实施方式,两根所述链条5的底端均固定有配重块20,两个所述配重块20之间设有连接板21,所述配重块20用于提高链条5的稳定性;工作时,在支撑座1横向移动后使得链条5的底部产生摆动,从而产生晃动,使得支撑座1产生摇摆,不利于摄像头13的拍摄,且在有风的天气时也容易使得摄像头13产生摆动;通过设置有配重块20使得链条5的底部受到拉力,从而使得链条5保持笔直的状态,有利于主动链轮3在链条5表面的移动;且配重块20的设置使得链条5的摆动幅度减小,且摆动的频率也降低,进一步的提高了链条5的稳定性;连接板21的设置使得两个配重块20始终保持初始的距离,从而使得两根链条5之间缠绕的几率降低,保证了支撑座1的顺利移动。
作为本发明的一种具体实施方式,所述连接板21顶端设有两个以上的挡风板22,所述挡风板22用于提高配重块20的稳定性,所述挡风板22呈弧形结构,两个以上的挡风板22首尾相连构成封闭图形,所述挡风板22的圆心位于封闭图形的外部;工作时,通过设置有挡风板22,在配重块20晃动的过程中使得挡风板22同步移动,挡风板22移动的过程中受到风的阻力较大,从而使得挡风板22移动受阻;挡风板22移动受阻使得配重块20移动受阻,从而使得配重块20的晃动幅度得到降低,进而使得配重块20能够快速的稳定下来,继而保证了摄像头13的稳定性;挡风板22构成封闭图形使得配重块20朝任意方向的晃动都能够受到风阻的影响,从而使得配重块20能够快速的停止晃动。
作为本发明的一种具体实施方式,所述连接板21底端固定有伸缩杆,所述伸缩杆的底端固定有接地板23,所述支撑座1的底端固定有一号板24,所述一号板24的侧壁上转动安装有二号杆25,所述一号板24侧壁上设有制动模块26,所述制动模块26用于控制二号杆25的转动,所述二号杆25远离一号板24的一端固定有绕卷筒27,所述绕卷筒27上缠绕设置有卷绳28,所述卷绳28的底端固定在接地板23的顶端,所述支撑板侧壁上固定有支架11,所述支架11顶端固定有二号板29,所述二号板29上转动安装有三号杆30,所述三号杆30和绕卷筒27之间设有同步带31,所述三号杆30靠近驱动电机2的一端设为方形,所述三号杆30靠近驱动电机2的一端滑动安装有滑块32,所述滑块32与二号板29之间设有限位弹簧33,所述限位弹簧33用于控制滑块32的位置,所述滑块32采用铁质材料制成,所述三号杆30与一号杆15同心;工作时,在风力较大时容易使得配重块20产生摆动,从而使得链条5产生大幅度的晃动,进而使得摄像头13产生晃动,影响到拍摄的质量;通过设置有接地板23,接地板23与地面接触,使得接地板23与地面具有较大的摩擦力,摩擦力使得接地板23在地面上移动受阻,从而使得配重块20移动受阻;在对摄像头13的横向位置进行调节时电磁铁19的吸力增大,使得滑块32朝向螺旋桨17的方向移动并且与螺旋桨17表面贴合;滑块32与螺旋桨17表面接触后产生摩擦力,螺旋桨17通过摩擦力带动滑块32转动,从而使得滑块32产生转动;滑块32转动的过程中带动三号杆30转动,使得三号杆30上的同步带31产生转动,从而使得绕卷筒27转动;绕卷筒27转动使得卷绳28受到牵引,从而使得接地板23被向上拉起与地面脱离;接地板23脱离地面后使得配重块20可自由移动,在接地板23离地后制动模块26限制二号杆25的转动,使得二号杆25停止转动,此处的制动模块26采用常规技术在此不做赘述,同时电磁铁19在控制系统的控制下减小对滑块32的吸力,使得滑块32在限位弹簧33的作用下与螺旋桨17脱离,从而使得三号杆30以及同步带31停止转动;螺旋桨17继续转动带动摄像头13改变位置,在摄像头13到达指定位置后制动模块26停止对二号杆25的限位,使得二号杆25自由转动,接地板23在重力的作用下掉落到地面上重新对配重块20进行限位,使得配重块20的晃动幅度得到控制,从而使得摄像头13的稳定性得到保证,使得监理工作效率提高。
作为本发明的一种具体实施方式,所述接地板23采用硅胶材料制成,所述接地板23内填充有铁块;工作时,接地板23采用硅胶材料使得接地板23较为柔软,从而使得接地板23与地面接触时与地面的接触面积增大,避免因地面凹坑造成接地板23与地面接触不良而导致接地板23在地面上滑动的情况发生,进而提高了接地板23对配重块20的稳定作用;接地板23内填充铁块使得接地板23的重量增大,从而使得接地板23与地面之间的摩擦力增大,进一步的提高了配重块20的稳定性,也使得摄像头13更加的稳定。
工作时,现有工程监理用到无人机替代人工进行监理工作,但是无人机在工作的过程中续航能力较短,使得无人机的检查时间较短,且无法大范围的检测,使得检测效率得不到保证,尤其对于高层施工来说无法检查到高处的施工状况,从而使得监理工作具有局限性,本发明对这一问题进行了解决;将安装座8固定安装在施工楼层的顶部中心位置,使得安装架6与地面平行,通过控制安装架6的长度使得链条5从楼层的边缘垂下并且与楼层之间具有间距;在进行监理工作时通过控制系统控制驱动电机2,使得驱动电机2带动两个主动链轮3转动,因相邻的主动链轮3和从动链轮4与链条5啮合,主动链轮3在转动的同时在链条5表面滚动,从而使得主动链轮3能够沿着链条5产生向上或者向下的移动,主动链轮3带动支撑座1沿着链条5产生移动,从而使得监控系统产生位移;监控系统在移动的同时使得无人机10以及摄像头13的位置产生移动,从而使得摄像头13可以对不同楼层的施工状况进行监视;摄像头13拍下的视频通过信号处理器输送至信号处理系统,信号处理系统对信号进行处理后输送给VR眼镜,使用者可通过佩戴VR眼镜虚拟查看现场的施工情况;在摄像头13具有死角时启动无人机10,通过控制系统对无人机10进行控制,使得无人机10能够飞进建筑物进行查看,无人机10上设有真空发生器,真空发生器通过管道与真空吸盘12连接,真空发生器将真空吸盘12内的气体抽出,使得真空吸盘12可吸附在楼顶或者其他物体上,使得无人机10不需要一直飞行,从而提高了无人机10的续航能力;在无人机10电量不足时回到初始位置,真空吸盘12将无人机10吸附在无线充电模块9的底端,且无线充电模块9对无人机10进行无线充电;通过人工转动转轴7带动安装架6转动,使得链条5上安装的一系列结构同步转动,从而使得摄像头13沿着建筑物周向转动,摄像头13对建筑物进行全方位的监控,提高了监理的全面性;本发明通过可升降的支撑座1带动无人机10和摄像头13沿着建筑物上下移动,使得监理的范围得到扩大,且在无人机10移动的过程中对无人机10进行无线充电,保证了无人机10的续航能力,使得无人机10能够进行长时间的工作,提高了监理的效率,并且通过VR技术来对现场进行查看,使得监理的效果更佳突出,便于监理人员对现场做出合理的安排,有助于工程的进展。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
一种基于VR技术的工程监理系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0