








专利摘要
本发明公开了一种框架与内部分体式入子的分合方法以及分合装置。该分合方法包括:提供框架、位于框架内部的分体式入子,分体式入子包括一对长周边入子以及位于一对长周边入子之间的中间入子和一对短周边入子,一对短周边入子分别位于中间入子的两侧;驱动中间入子上移;驱动短周边入子向框架的中间位置、上方移动;驱动长周边入子向框架的中间位置移动;取出框架;驱动长周边入子至初始位置,驱动短周边入子至初始位置;驱动中间入子下移至初始位置。本发明要解决的一个技术问题是如何在将分体式入子从框架内拆下的过程中避免对框架高光镜面的损伤。
权利要求
1.一种框架与内部分体式入子的分合方法,其特征在于,包括:
提供框架(091)、位于框架(091)内部的分体式入子(090),分体式入子(090)包括一对长周边入子(902)以及位于一对长周边入子(902)之间的中间入子(900)和一对短周边入子(901),一对短周边入子(901)分别位于中间入子(900)的两侧;
驱动中间入子(900)上移;
驱动短周边入子(901)向框架(091)的中间位置、上方移动;
驱动长周边入子(902)向框架(091)的中间位置移动;
取出框架(091);
驱动长周边入子(902)至初始位置,驱动短周边入子(901)至初始位置;
驱动中间入子(900)下移至初始位置。
2.根据权利要求1所述的框架与内部分体式入子的分合方法,其特征在于,还提供有第一压块(202)和顶出件(211),第一压块(202)向下压合长周边入子(902)和短周边入子(901),顶出件(211)向上顶出中间入子(900)。
3.根据权利要求1或2所述的框架与内部分体式入子的分合方法,其特征在于,还提供有磁铁(204),在中间入子(900)上移后,磁铁(204)将中间入子(900)吸住;在驱动长周边入子(902)、短周边入子(901)至初始位置后,中间入子(900)脱离磁铁(204)下移至初始位置。
4.根据权利要求1所述的框架与内部分体式入子的分合方法,其特征在于,还提供有第一定位销(314)和第二定位销(315),在短周边入子(901)、长周边入子(902)上设有分别与第一定位销(314)、第二定位销(315)相匹配的销孔,第一定位销(314)插入短周边入子(901)的销孔内依次带动短周边入子(901)向框架(091)的中间位置、上方移动,并带动短周边入子(901)复位至初始位置;第二定位销(315)插入长周边入子(902)的销孔内带动长周边入子(902)向框架(091)的中间位置移动,并带动长周边入子(902)复位至初始位置。
5.根据权利要求1所述的框架与内部分体式入子的分合方法,其特征在于,在中间入子(900)下移至初始位置后,将分体式入子(090)整平以重新组合在一起。
6.一种框架与内部分体式入子的分合装置,其特征在于,包括:
移动部装(001),所述移动部装(001)包括用于承载框架的支撑件(102),所述支撑件(102)被配置为能依次被移动至中间入子分离位置(005)、周边入子分离位置(006)、所述中间入子分离位置(005);
中间入子分合部装(002),所述中间入子分合部装(002)被配置为:在所述支撑件(102)被首次移动至所述中间入子分离位置(005)后能驱动中间入子上移,在所述支撑件(102)再次移动至所述中间入子分离位置(005)后能驱动中间入子下移至初始位置;
周边入子分合部装(003),所述周边入子分合部装(003)被配置为:在所述支撑件(102)移动至所述周边入子分离位置(006)后能驱动短周边入子向框架中间位置、上方移动、再驱动长周边入子向框架中间位置移动,在框架被取出后能依次驱动长周边入子、短周边入子至初始位置;
框架取出部装(004),所述框架取出部装(004)被配置为在长周边入子向框架中间位置移动后能取出框架。
7.根据权利要求6所述的框架与内部分体式入子的分合装置,其特征在于,所述移动部装(001)还包括第一导轨(103)和电缸(100),所述电缸(100)被配置为能驱动所述支撑件(102)沿所述第一导轨(103)往复移动,以将所述支撑件(102)依次移动至所述中间入子分离位置(005)、所述周边入子分离位置(006)、所述中间入子分离位置(005)。
8.根据权利要求6所述的框架与内部分体式入子的分合装置,其特征在于,所述周边入子分合部装(003)包括周边入子上顶部装(031)以及用于压合短周边入子、长周边入子的第二下压部装(030),所述周边入子上顶部装(031)包括第一定位销(314)和第二定位销(315),所述第一定位销(314)被配置为能向上插入短周边入子的销孔内并带动短周边入子沿向框架中间位置的方向往复移动、沿向框架上方的方向往复移动,所述第二定位销(315)被配置为能向上插入长周边入子的销孔内并带动长周边入子向框架中间位置的方向往复移动。
9.根据权利要求6所述的框架与内部分体式入子的分合装置,其特征在于,所述中间入子分合部装(002)包括第一下压部装(020)以及中间入子顶出部装(021),所述第一下压部装(020)包括第一压块(202)以及磁铁组件,所述第一压块(202)被配置为在所述支撑件(102)被首次移动至所述中间入子分离位置(005)后能压合周边入子,所述中间入子顶出部装(021)被配置为在周边入子被压合后能顶出中间入子以上移,所述磁铁组件被配置为在中间入子上移后能将中间入子吸住、在所述支撑件(102)再次移动至所述中间入子分离位置(005)后能使中间入子下移。
10.根据权利要求9所述的框架与内部分体式入子的分合装置,其特征在于,所述支撑件(102)还被配置为在中间入子下移至初始位置后能被移动至入子整合位置(007),所述第一下压部装(020)还包括第二压块(203),所述第二压块(203)被配置为在所述支撑件(102)被移动至所述入子整合位置(007)后能将中间入子和周边入子整平以重新组合在一起。
说明书
技术领域
本发明涉及自动化工业加工领域,具体地,本发明涉及一种框架与内部分体式入子的分合方法以及分合装置,更具体地,本发明涉及一种3D眼镜框与内部分体式入子的分合方法以及分合装置。
背景技术
在3D眼镜框等框架中,框架为中空结构,框架的表面为高光镜面。在框架的具体生产过程中,通常需要入子配合注塑机模具成型,此时入子实质上是一种可拆卸模具。在注塑完成后,入子会镶嵌在框架中。
为了获得所需的3D眼镜框等框架,必须将入子与框架分离。在分离过程中,框架的高光镜面极易受损。
入子可以采用多种结构。例如,入子可以采用整体式结构的入子,此种结构的入子一般采用半自动化设备直接将入子从框架中冲出,该分离方法容易造成框架、高光镜面和入子的损坏。
例如,入子也可以采用分体式结构的入子,分体式结构的入子在框架注塑完成后能够较为容易地与框架分离。而且,在取走框架后,分体式入子可以重复利用。但是,现有分体式入子与框架的重组作业均由人工完成,框架上的高光镜面容易被划伤、压伤,且生产效率低、人工成本高。
因此,有必要对现有3D眼镜框等框架与其内部分体式入子的分合方法和装置进行改进。
发明内容
有鉴于此,本发明的一个目的是提供一种框架与内部分体式入子的分合方法以及分合装置的新技术方案。
根据本发明的第一方面,提供了一种框架与内部分体式入子的分合方法。该框架与内部分体式入子的分合方法包括:提供框架、位于框架内部的分体式入子,分体式入子包括一对长周边入子以及位于一对长周边入子之间的中间入子和一对短周边入子,一对短周边入子分别位于中间入子的两侧;驱动中间入子上移;驱动短周边入子向框架的中间位置、上方移动;驱动长周边入子向框架的中间位置移动;取出框架;驱动长周边入子至初始位置,驱动短周边入子至初始位置;驱动中间入子下移至初始位置。
可选地,还提供有第一压块和顶出件,在第一压块向下压合长周边入子和短周边入子后,顶出件向上顶出中间入子。
可选地,还提供有磁铁,在中间入子上移后,磁铁将中间入子吸住;在驱动长周边入子、短周边入子至初始位置后,中间入子脱离磁铁下移至初始位置。
可选地,还提供有第一定位销和第二定位销,在短周边入子、长周边入子上设有分别与第一定位销、第二定位销相匹配的销孔,第一定位销插入短周边入子的销孔内依次带动短周边入子向框架的中间位置、上方移动,并带动短周边入子复位至初始位置;第二定位销插入长周边入子的销孔内带动长周边入子向框架的中间位置移动,并带动长周边入子复位至初始位置。
可选地,中间入子下移至初始位置后,将分体式入子整平以重新组合在一起。
根据本发明的第二方面,提供了一种框架与内部分体式入子的分合装置。该框架与内部分体式入子的分合装置包括:移动部装,所述移动部装包括用于承载框架的支撑件,所述支撑件被配置为能依次被移动至中间入子分离位置、周边入子分离位置、中间入子分离位置;中间入子分合部装,所述中间入子分合部装被配置为:在所述支撑件被首次移动至所述中间入子分离位置后能驱动中间入子上移,在所述支撑件再次移动至所述中间入子分离位置后能驱动中间入子下移至初始位置;周边入子分合部装,所述周边入子分合部装被配置为:在所述支撑件移动至所述周边入子分离位置后能驱动短周边入子向框架中间位置、上方移动、再驱动长周边入子向框架中间位置移动,在框架被取出后能依次驱动长周边入子、短周边入子至初始位置;框架取出部装,所述框架取出部装被配置为在长周边入子向框架中间位置移动后能取出框架。
可选地,所述移动部装还包括第一导轨和电缸,所述电缸被配置为能驱动所述支撑件沿所述第一导轨往复移动,以将所述支撑件依次移动至中间入子分离位置、周边入子分离位置、中间入子分离位置。
可选地,所述周边入子分合部装包括第二下压部装以及周边入子上顶部装,所述周边入子上顶部装包括第一定位销和第二定位销,所述第一定位销被配置为能向上插入短周边入子的销孔内并带动短周边入子沿向框架中间位置的方向往复移动、沿向框架上方的方向往复移动,所述第二定位销被配置为能带动长周边入子向框架中间位置的方向往复移动。
可选地,所述中间入子分合部装包括第一下压部装以及中间入子顶出部装,所述第一下压部装包括第一压块以及磁铁组件,所述第一压块被配置为在所述支撑件被首次移动至所述中间入子分离位置后能压合周边入子,所述中间入子顶出部装被配置为能在周边入子被压合后顶出中间入子以上移,所述磁铁组件被配置为能在中间入子上移后将中间入子吸住、在所述支撑件再次移动至所述中间入子分离位置后能中间入子下移。
可选地,所述支撑件还被配置为在中间入子下移至初始位置后能被移动至入子整合位置,所述第一下压部装还包括第二压块,所述第二压块被配置为在所述支撑件被移动至所述入子整合位置后能将中间入子和周边入子整平以重新组合在一起。
可选地,所述框架取出部装包括旋转气缸、第七滑台气缸和设有夹爪的第三气爪,所述旋转气缸被配置为能带动所述第七滑台气缸往复转动以使所述第七滑台气缸位于框架的上方,所述第七滑台气缸被配置为能带动所述第三气爪朝向或者远离框架移动,所述第三气爪被配置为能带动所述夹爪往复移动以取、放框架。
可选得,在所述夹爪上设有用于承载框架的承载面。
可选地,还包括收取部装,所述收取部装包括电机、用于承载框架的皮带以及用于检测框架位置的光电传感器,所述电机被配置为能带动所述皮带运动,且在所述光电传感器检测到框架到达指定位置时停止运动。
本发明的发明人发现,现有整体式入子一般采用半自动化设备直接将入子从框架中冲出,该分离方法容易造成框架、高光镜面和入子的损坏;分体式入子较易与框架分离。但是,现有分体式入子与框架的分离和重组均由手工完成,生产效率低,人工成本高,而且框架上的高光镜面容易被划伤。
本发明的发明人进一步发现:框架中间位置的中间入子先脱离,短周边入子移动至框架中间位置后脱离,长周边入子再移动至框架中间位置。之后,能够直接取出框架,能杜绝框架上高光镜面的压伤、划伤。
本发明提供的框架与内部分体式入子的分合方法以及分合装置中,能够实现分体式入子的自动拆解,分体式入子中的各个部分自动重组。用时较快,极大提高了生产效率。分体式入子在与框架的分离过程中,分体式入子采用特定的顺序分离,能够杜绝框架上高光镜面的划伤、压伤。
因此,本发明所要实现的技术任务或者所要解决的技术问题是本领域技术人员从未想到的或者没有预期到的,故本发明是一种新的技术方案。
通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
附图说明
被结合在说明书中并构成说明书的一部分的附图示出了本发明的实施例,并且连同其说明一起用于解释本发明的原理。
图1是本发明一种实施例中提供的框架与内部分体式入子的分合方法的示意图;
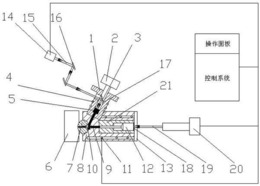
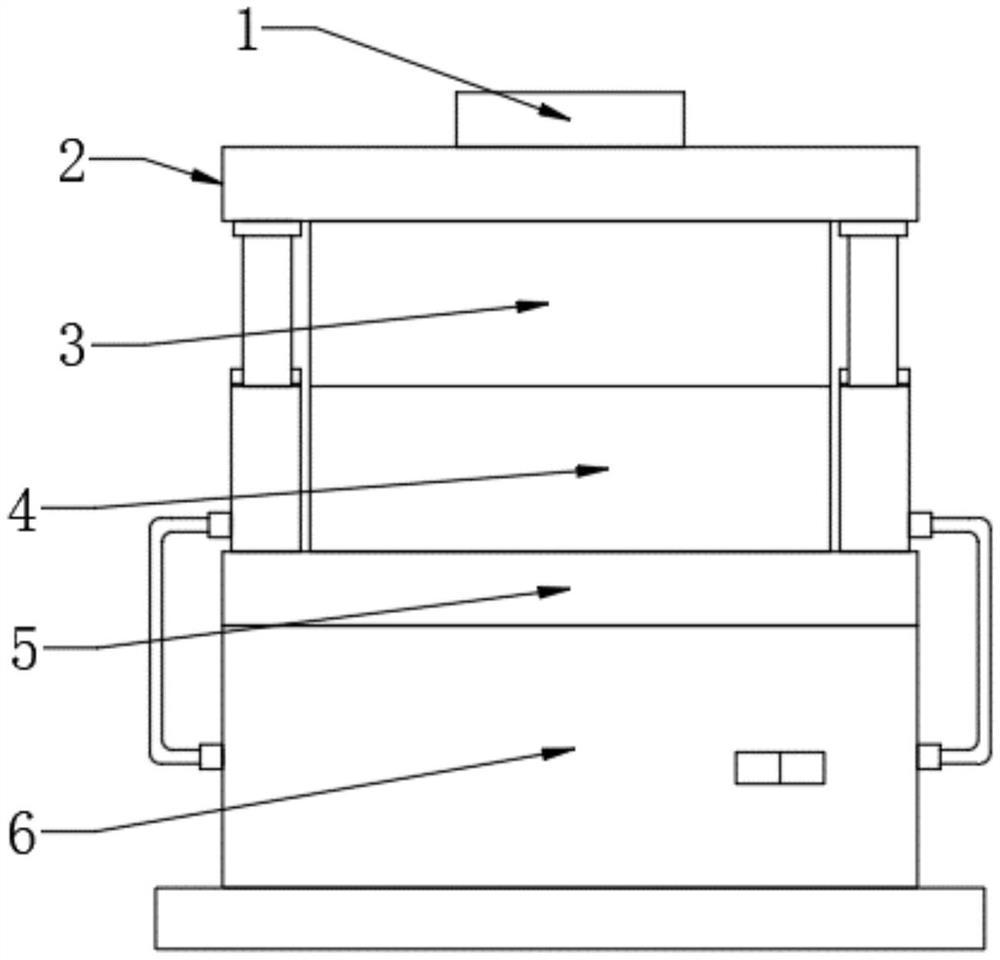
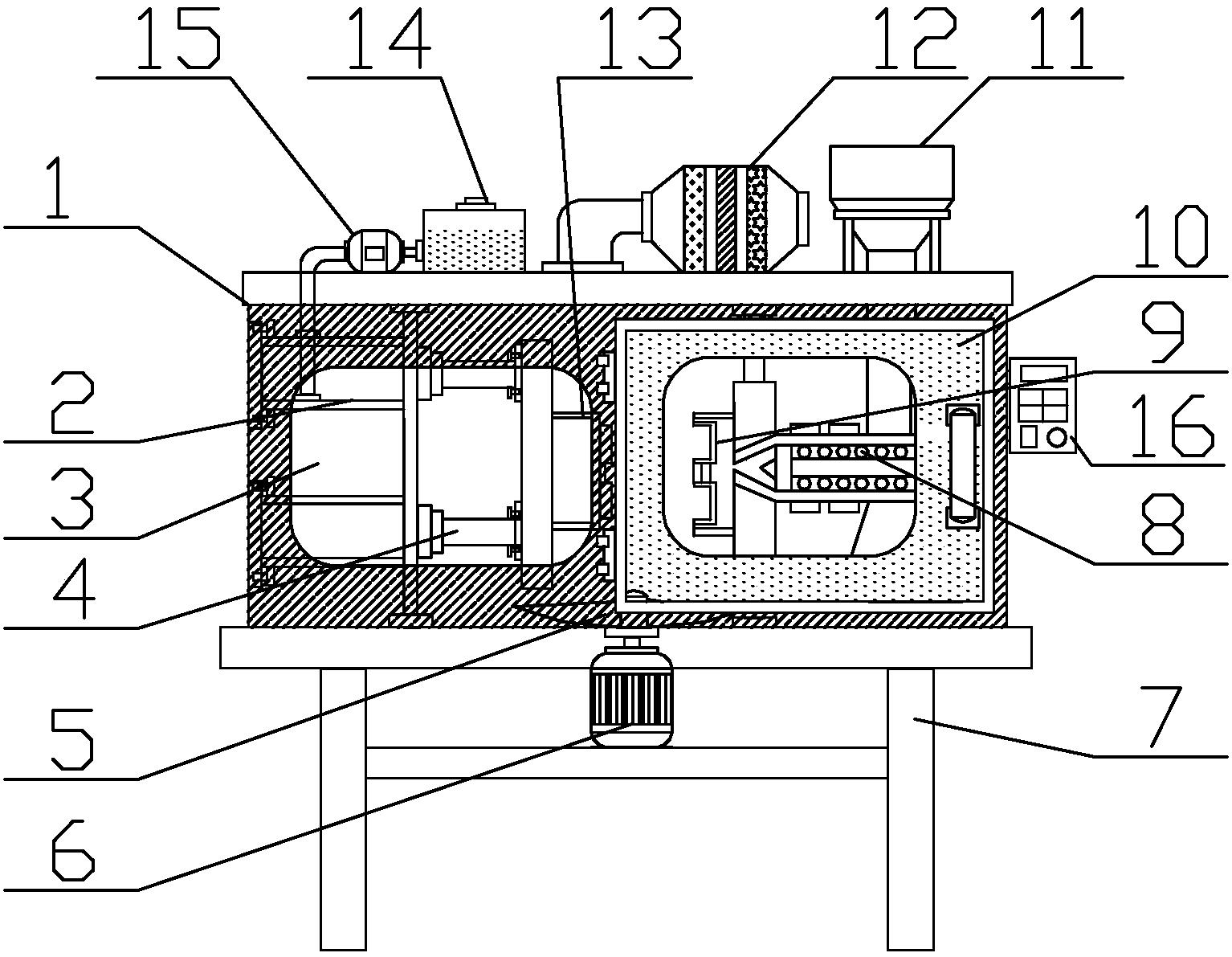
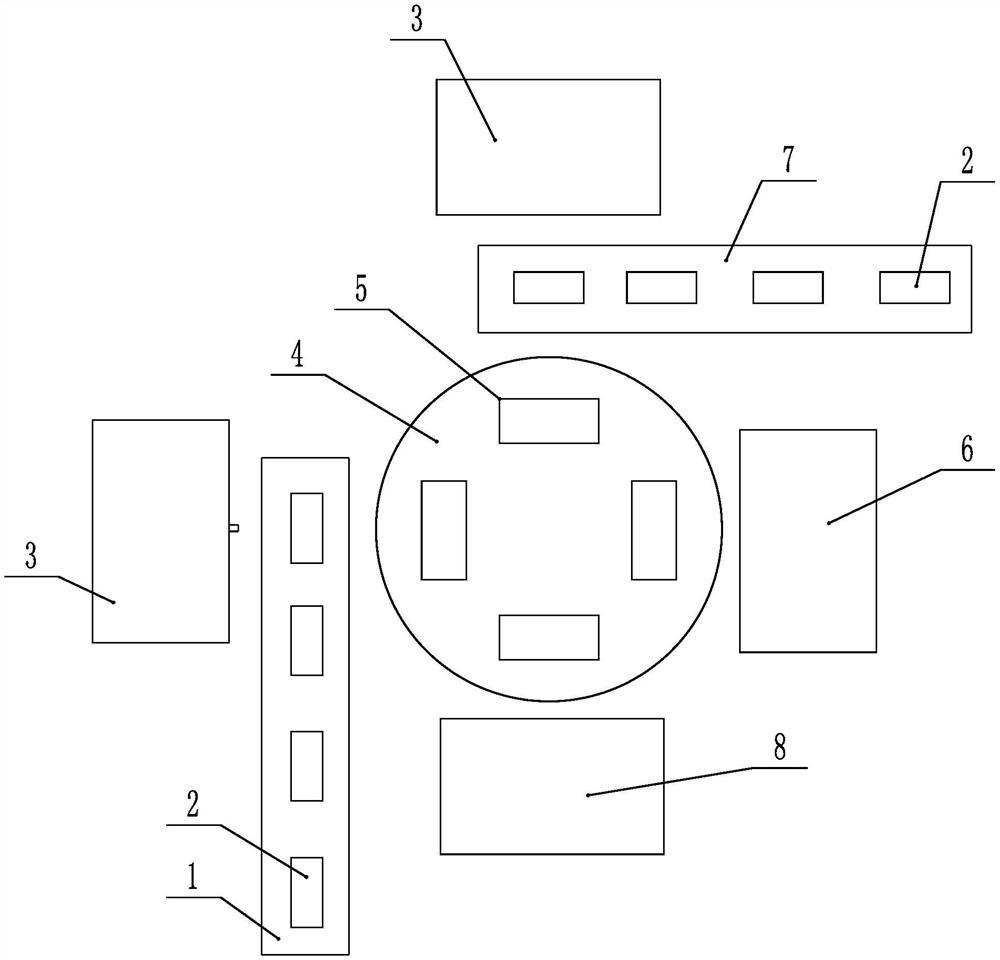
图2是本发明一种实施例中提供的框架与内部分体式入子的分合装置的示意图;
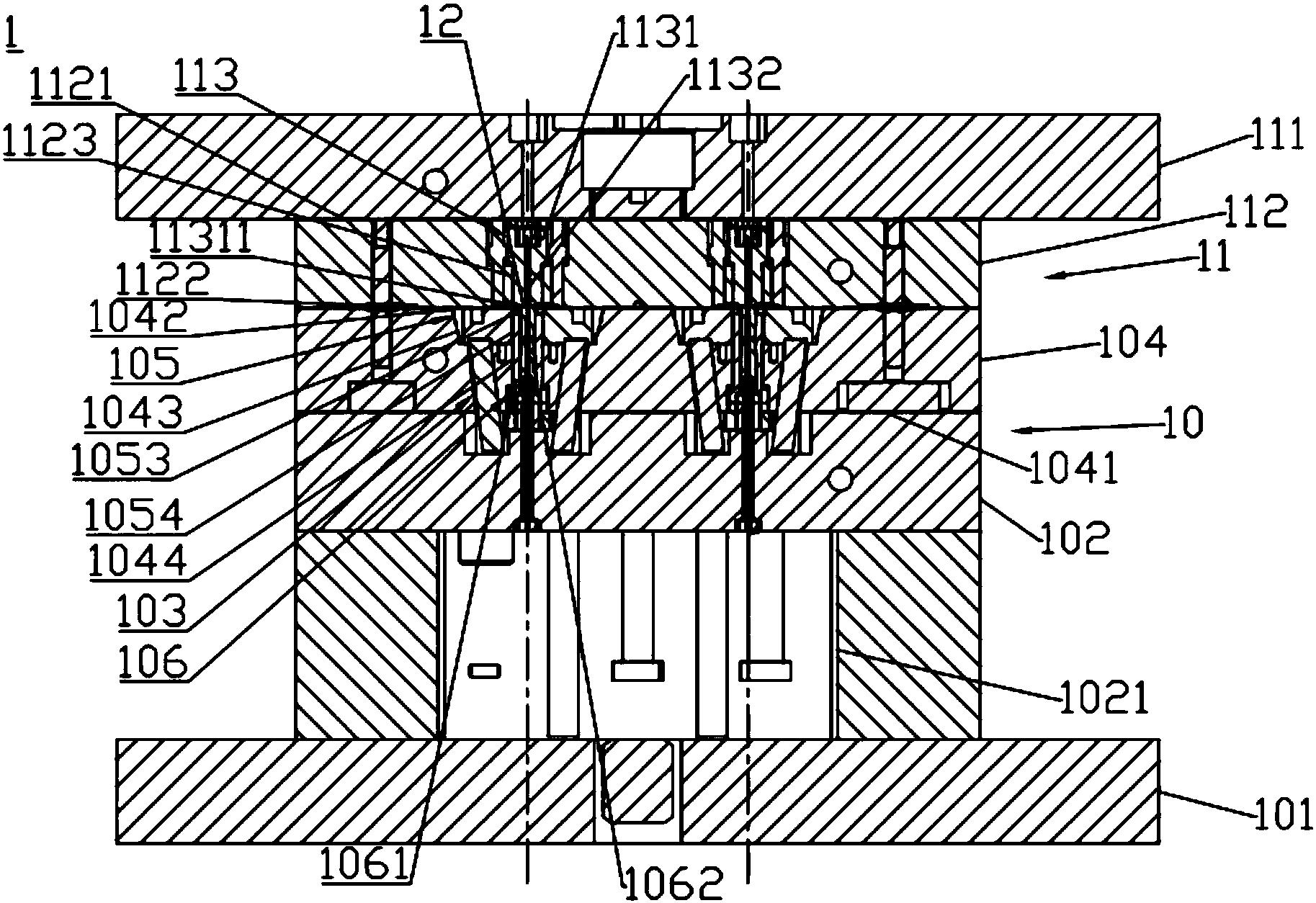
图3是本发明一种实施例中提供的移动部装的结构示意图;
图4是本发明一种实施例中提供的支撑件的结构示意图;
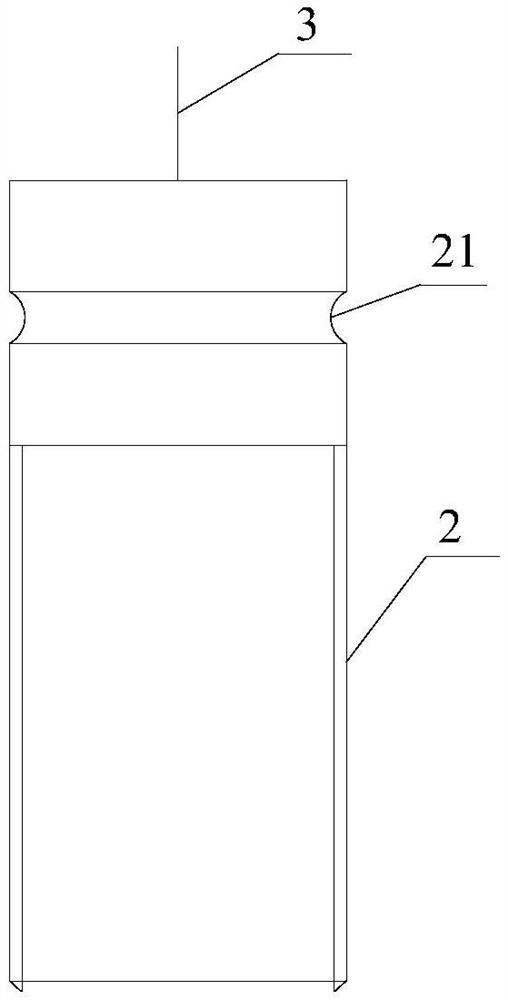
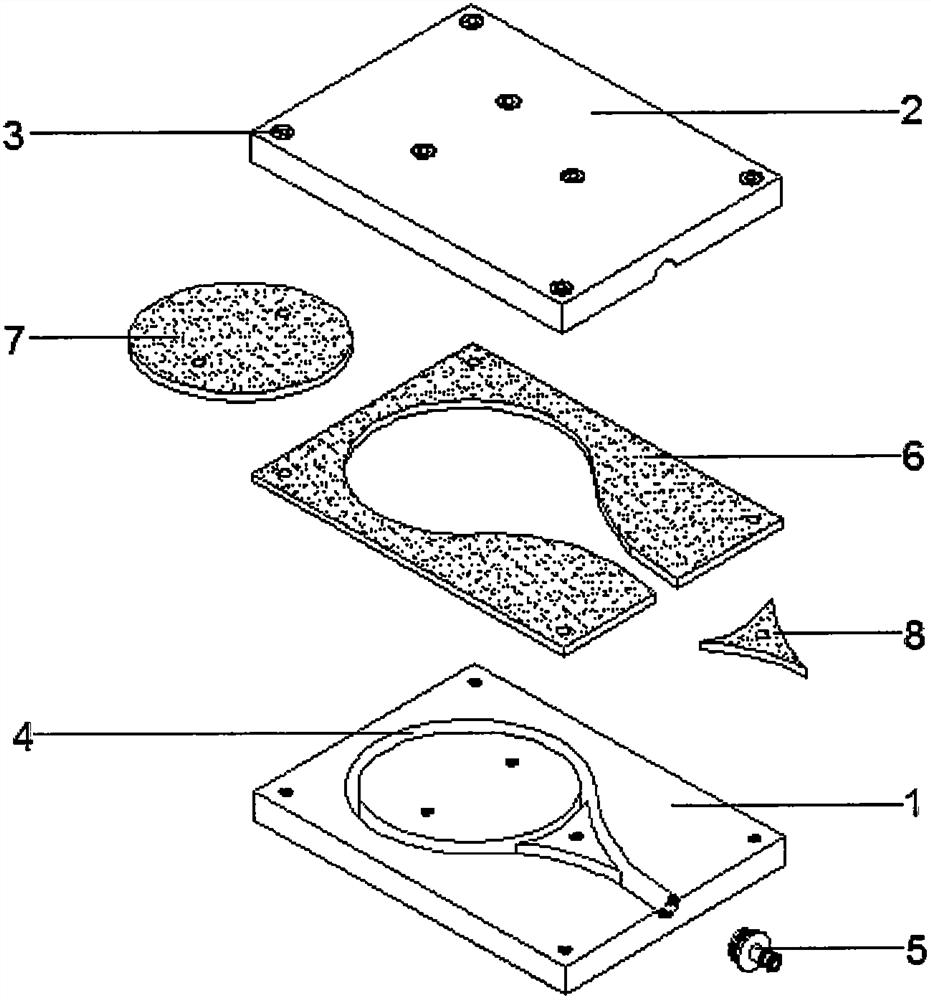
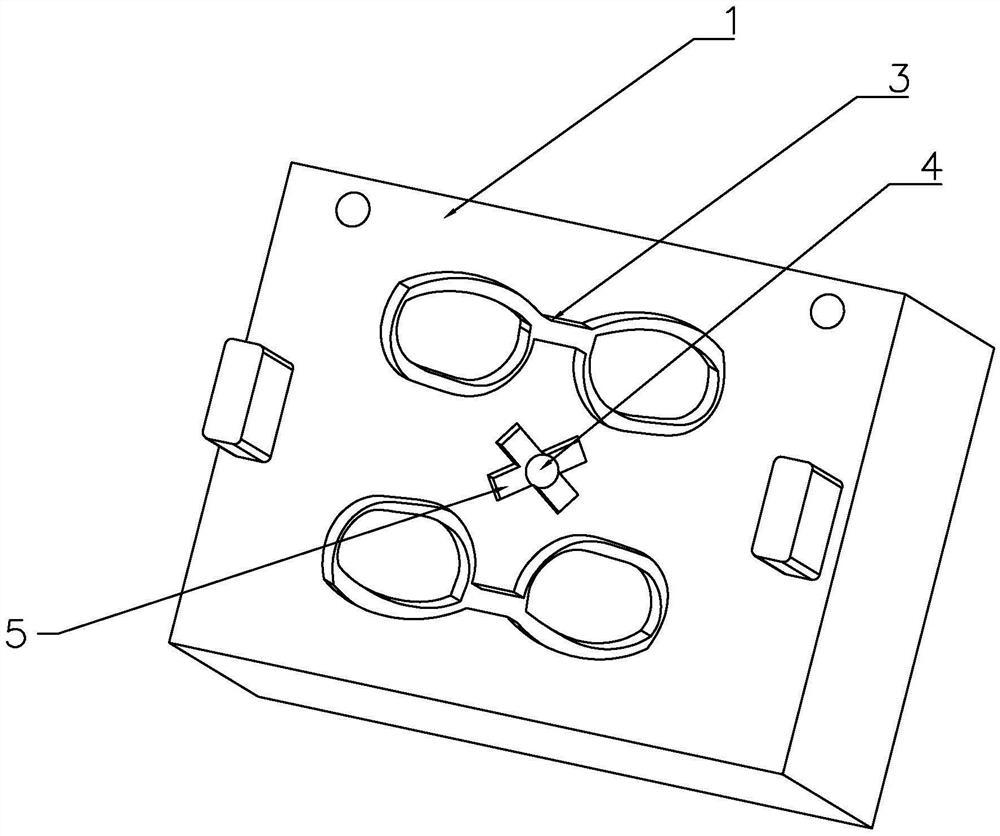
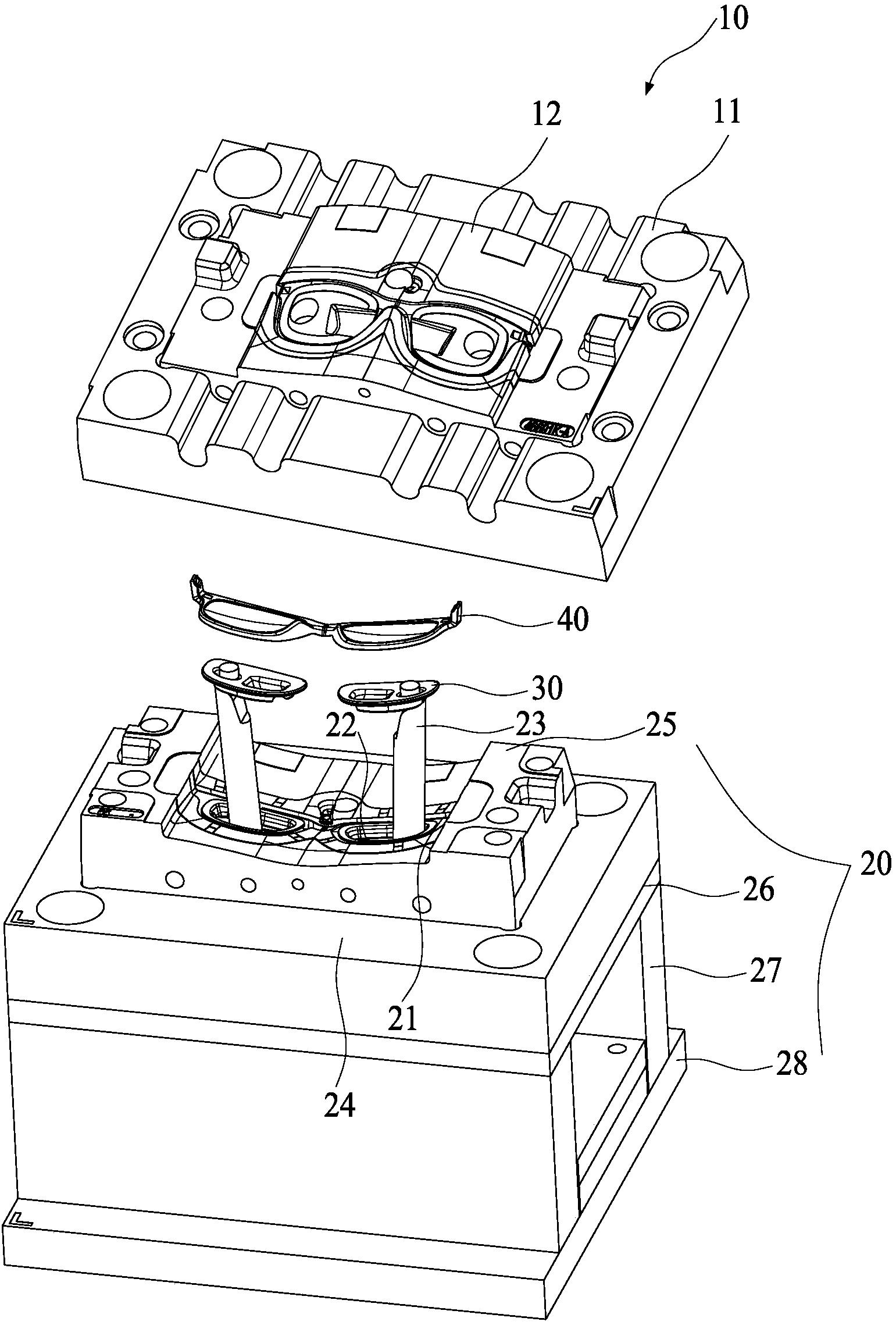
图5是本发明一种实施例中提供的框架和分体式入子的结构示意图;
图6是本发明一种实施例中提供的第一下压部装的结构示意图;
图7是图6中第一下压部装的仰视图;
图8是本发明一种实施例中提供的中间入子顶出部装的结构示意图;
图9是本发明一种实施例中提供的第二下压部装的结构示意图;
图10是本发明一种实施例中提供的周边入子上顶部装的结构示意图;
图11是本发明一种实施例中提供的框架取出部装的结构示意图;
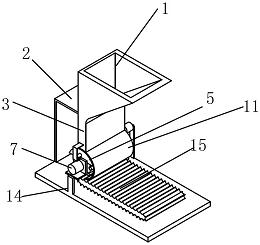
图12是本发明一种实施例中提供的收取部装的结构示意图。
其中,001:移动部装;100:电缸;101:安装板;102:支撑件;1020:避让孔;1021:避让销孔;103:第一导轨;002:中间入子分合部装;020:第一下压部装;200:第一滑台气缸;201:连接板;202:第一压块;203:第二压块;204:磁铁;205:导出块;206:第二气缸;207:限位块;021:中间入子顶出部装;210:第八气缸;211:顶出件;003:周边入子分合部装;030:第二下压部装;300:第四气缸;301:第三压块;031:周边入子上顶部装;310:第五滑台气缸;311:第六滑台气缸;312:第一气爪;313:第二气爪;314:第一定位销;315:第二定位销;032:第三滑台气缸;004:框架取出部装;400:旋转气缸;401:第七滑台气缸;402:第三气爪;403:夹爪;4030:卡槽;005:中间入子分离位置;006:周边入子分离位置;007:入子整合位置;008:收取部装;800:电机;801:光电传感器;802:皮带;090:分体式入子;900:中间入子;901:短周边入子;902:长周边入子;091:框架。
具体实施方式
现在将参照附图来详细描述本发明的各种示例性实施例。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。
以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。
对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
在这里示出和讨论的所有例子中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它例子可以具有不同的值。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
本发明提供了一种框架与内部分体式入子的分合方法,参考图1、图2、图5,该分合方法包括:提供框架091、位于框架091内部的分体式入子090。分体式入子090包括一对长周边入子902以及位于一对长周边入子之间的中间入子900和一对短周边入子901。一对短周边入子901分别位于中间入子900的两侧。例如中间入子900可以为矩形,一对短周边入子901位于中间入子900的两侧,一对长周边入子902位于中间入子900的另外两侧。以下将长周边入子902和短周边入子901的组合称为周边入子。例如框架091可以是眼镜框或者其他形状、类型的框架等,分体式入子090处于框架091内部。该分合方法可以单独分离一个框架或者同时分离、重整多个框架内的分体式入子。定义重力方向为下,重力的反方向为上,提供的框架091和其内部分体式入子090可以水平放置。
驱动中间入子900上移。如此,中间入子900从长周边入子902、短周边入子901的包围中脱离出来,以便于短周边入子901向框架091的中间位置移动。
具体地,参考图6,可提供第一压块202和顶出件211。在第一压块202向下压合长周边入子902和短周边入子901后,顶出件211向上顶出中间入子900,以使中间入子900上移。例如,可以分别设置气缸或电缸等驱动装置来驱动第一压块202、顶出件211沿所需方向往复移动。中间入子900在上移后可固定于特定位置。
驱动短周边入子901向框架091的中间位置、上方移动。为减小对框架091上的高光镜面的损坏,先驱动短周边入子901向框架091的中间位置方向移动以与框架091脱离,之后对短周边入子901的移动顺序并不具体限定。如此,短周边入子901脱离框架091并位于框架091中间位置的上方,便于长周边入子902向框架091的中间位置移动。
驱动长周边入子902向框架091的中间位置移动。如此,分体式入子090全部与框架091的内表面脱离,不在连接在一起。
分体式入子090全部从框架091内表面上脱离后,再取出框架091。至此,将分体式入子090从框架091中脱离,并将框架091取出来。且不会损伤框架091的高光镜面。
取出框架091之后,驱动长周边入子902复位至初始位置。在长周边入子902复位后,再驱动短周边入子901复位至初始位置。如此,全部周边入子均已复位。
周边入子全部复位后,驱动中间入子900下移以复位至初始位置。如此,整个分体式入子090重组完成。
中间入子900下移后并不一定完全对准长周边入子902与短周边入子901围成的空间内。可选地,参考图2、图5、图7,中间入子900下移至初始位置后,将分体式入子090整平以重新组合在一起。例如可以通过压块等压平整合整个分体式入子090。
可选地,在中间入子900、长周边入子902以及短周边入子901中的任意两个之间可以设置有相匹配的凸起和凹陷结构,以使其相互连接在一起。
中间入子900在上移后可以固定于特定位置。在一个例子中,参考图2、图5、图6,还可以提供有磁铁204。在中间入子900上移后,磁铁204将中间入子900吸住。在驱动长周边入子902、短周边入子901至初始位置后,中间入子900脱离磁铁204下移至初始位置。例如图6所示,磁铁204可以与导出块205配合使用,导出块205用于将中间入子900顶出。当然磁铁204可以置换为电磁铁,通过其上线圈的通电、断电控制磁力的产生、消失。
周边入子的分离和重组需要精准控制。优选地,参考图2、图5、图10,可提供第一定位销314和第二定位销315。对应地,在短周边入子901、长周边入子902上设有分别与第一定位销314、第二定位销315相匹配的销孔。第一定位销314插入短周边入子901的销孔内以依次带动短周边入子901向框架091的中间位置、框架091的上方移动。在框架091被取出后,第一定位销314带动短周边入子901复位至初始位置。第二定位销315插入长周边入子902的销孔内以依次带动长周边入子902向框架091的中间位置移动。在短周边入子901复位至初始位置之后,第二定位销315带动长周边入子902复位至初始位置。
本发明还提供了一种框架与内部分体式入子的分合装置,参考图2,该分合装置包括:移动部装001、中间入子分合部装002、周边入子分合部装003以及框架取出部装004。其中,参考图3、图4,所述移动部装001可以包括用于承载框架091的支撑件102。所述支撑件102带动框架091依次移动至中间入子分离位置005、周边入子分离位置006、所述中间入子分离位置005。例如图4所示,在所述支撑件102可以为工装板、支架等,在所述支撑件102上可以设有用于定位、放置框架091的凹陷结构。
分体式入子090的厚度可以大于框架091的厚度,以减小框架091与所述支撑件102的接触面积。例如,当框架091为具有两个框架091的眼镜框时,只有眼镜框上能与用户鼻子部位接触的中间位置与所述支撑件102接触。
为了拆解分体式入子090,例如图4所示,在所述支撑件102上还可以设有若干避让结构。
所述移动部装001用于实现所述支撑件102往复移动。优选地,参考图3、图4,所述移动部装001还可以包括第一导轨103以及电缸100。所述电缸100驱动所述支撑件102沿所述第一导轨103依次移动至所述中间入子分离位置005、周边入子分离位置006、中间入子分离位置005。进一步地,所述支撑件102可以固定于安装板101上。所述安装板101的一端可以通过滑块连接在所述第一导轨103上。所述安装板101的另一端连接在所述电缸100上。所述电缸100带动所述安装板101沿所述第一导轨103依次移动至指定位置。
可以理解,所述中间入子分离位置005、周边入子分离位置006也可以在同一位置。通过中间入子分合部装002、周边入子分合部装003、框架取出部装004的移动分别实现相应动作。在所述安装板101上可以设有若干避让结构。
所述中间入子分合部装002用于分离中间入子900以及复位中间入子900。参考图2至图5,在所述支撑件102被首次移动至所述中间入子分离位置005后,所述中间入子分合部装002驱动中间入子900上移。在所述支撑件102再次移动至所述中间入子分离位置005后,所述中间入子分合部装002能驱动中间入子900下移以复位至初始位置。
具体地,参考图2、图6、图8,所述中间入子分合部装002可以包括第一下压部装020以及中间入子顶出部装021。所述第一下压部装020可以位于所述中间入子分离位置005的上方,所述中间入子顶出部装021可以位于所述中间入子分离位置005的下方。所述第一下压部装020包括第一压块202以及磁铁组件。在所述支撑件102被首次移动至所述中间入子分离位置005后,所述第一压块202压合周边入子。在周边入子被压合后,所述中间入子顶出部装021顶出中间入子900以使其上移。所述中间入子顶出部装021可包括顶出件211,例如所述顶出件211可以为顶针或者顶块等。参考图5,对应地,在所述支撑件102上可设有避让孔1020,在所述安装板101上也设有对应的避让结构。
在中间入子900上移过程中,当中间入子900接近所述磁铁组件的位置时,所述磁铁204将中间入子900吸住。在所述支撑件102再次移动至所述中间入子分离位置005后,中间入子900下移。在一个例子中,参考图6,所述磁铁组件可以包括磁铁204、导出块205。所述磁铁204可为中间镂空结构。所述导出块205往复移动以穿出所述镂空结构从而下压中间入子900,以使得中间入子900下移复位。当然,所述磁铁组件也可以是电磁铁,通过其上线圈的通电、断电控制磁力的产生、消失以吸住或者分离于中间入子900。
中间入子900下移后并不一定完全对准长周边入子902与短周边入子901围成的空间内。可选地,参考图2、图6、图7,在中间入子下移至初始位置后,所述支撑件102还可以被移动至入子整合位置007。所述第一下压部装020还可以包括第二压块203。在所述支撑件102被移动至入子整合位置007后,所述第二压块203将中间入子900和周边入子整平以重新组合在一起。
在本发明的一个具体实施方式中,参照图2至图8,第一下压部装020包括第一压块202、第二压块203、磁铁204、导出块205、第一滑台气缸200、连接板201和第二气缸206。所述中间入子顶出部装021包括第八气缸210和顶出件211。所述连接板201直接或者间接的安装在所述第一滑台气缸200的滑台上。所述第一压块202和所述第二压块203分别安装在所述连接板201的两个端面上。所述第二气缸206安装在所述连接板201上所述第一压块202所在的端面上。所述第一滑台气缸200通过其上的滑台来带动所述第一压块202和第二压块203往复移动,以使得所述第一压块202向下压合周边入子或所述第二压块203向下压合周边入子和中间入子900。所述第八气缸210带动所述顶出件211往复移动,以将中间入子900顶出。所述磁铁204位于中间入子900的上方,以吸住中间入子900。所述磁铁204为中间镂空结构,所述第二气缸206带动所述导出块205沿着所述磁铁204中间镂空结构的延伸方向往复移动,以下压中间入子900使其复位。
参考图6,在所述连接板201上还可以固设有限位块207,以对所述第一压块202、第二压块203的移动距离进行限位。所述第一下压部装020还可以包括光纤传感器,所述磁铁204和所述光纤传感器可以安装在所述第一压块202上。所述光纤传感器用于检测所述磁铁204是否吸住中间入子900。如此,能够避免在所述磁铁204未吸住中间入子900时进入下一步骤。
所述周边入子分合部装003用于分离、重组周边入子。参考图2至图5,在所述支撑件102移动至所述周边入子分离位置006后,所述周边入子分合部装003驱动短周边入子901向框架091的中间位置、上方移动、再驱动长周边入子902向框架091的中间位置移动。在框架091被取出后,所述周边入子分合部装003能依次驱动长周边入子902、短周边入子901至初始位置。
优选地,参考图2、图9、图10,所述周边入子分合部装003可以包括第二下压部装030以及周边入子上顶部装031。所述第二下压部装030用于向下压合短周边入子901、长周边入子902。例如所述第二下压部装030可以包括第三压块301。所述周边入子上顶部装031包括第一定位销314和第二定位销315。所述第一定位销314向上插入短周边入子901的销孔内并带动短周边入子901沿向框架091中间位置的方向往复移动、沿向框架091上方的方向往复移动。所述第二定位销315向上插入长周边入子902的销孔内并带动长周边入子902向框架091中间位置的方向往复移动。如此,所述周边入子分合部装003能实现所述分合方法中相对应的步骤。
在本发明的一种具体实施方式中,所述周边入子分合部装003包括第三滑台气缸032、第二下压部装030和周边入子上顶部装031。所述第三滑台气缸032通过滑台带动整个第二下压部装030移动至所述周边入子分离位置006的上方。所述第二下压部装030可以包括第四气缸300、第三压块301。所述第四气缸300带动所述第三压块301往复移动,以向下压合周边入子。所述周边入子上顶部装031包括第一定位销314、第二定位销315、第五滑台气缸310、第六滑台气缸311、第一气爪312和第二气爪313。所述第二气爪313和第六滑台气缸311安装在所述第五滑台气缸310的滑台上。所述第一气爪312安装在所述第六滑台气缸311的滑台上。所述第一定位销314安装在所述第一气爪312上。所述第二定位销315安装在所述第二气爪313上。所述第五滑台气缸310用于带动所述第二气爪313和第六滑台气缸311往复移动,以使得所述第一定位销314插入短周边入子901的销孔内、所述第二定位销315插入长周边入子902的销孔内。所述第一气爪312用于带动第一定位销314沿向框架091中间位置的方向往复移动。所述第六滑台气缸311用于带动所述第一气爪312以及其上的第一定位销314沿向框架091上方的方向往复移动。所述第二气爪313用于带动所述第二定位销315向框架091中间位置的方向往复移动。
参考图2至图5,所述框架取出部装004用于取出框架091。在长周边入子902向框架091的中间位置移动后,所述框架取出部装004取出框架091并将框架091送入收取部装008。
具体地,参考图11,所述框架取出部装004包括旋转气缸400、第七滑台气缸401和设有夹爪403的第三气爪402。例如,所述夹爪403可以是所述第三气爪402上的平行夹爪,其内部具体结构为现有技术,在此不做赘述。所述旋转气缸400带动所述第七滑台气缸401往复转动,以使所述第七滑台气缸401位于框架091的上方。所述第七气缸带动所述第三气爪402往复移动,以使所述第三气爪402朝向或者远离框架091移动。所述第三气爪402带动所述夹爪403往复移动以取出框架091或脱离于框架091。
在所述框架取出部装004取出框架091时,框架091上的高光镜面受到挤压时易产生压痕。优选地,在所述夹爪403上设有用于承载框架091的承载面。例如图11所示,在所述夹爪403上设有两个相对的卡槽4030,框架091承载于两个所述卡槽4030的底面。如此,所述夹爪403不会挤压框架091上的高光镜面。
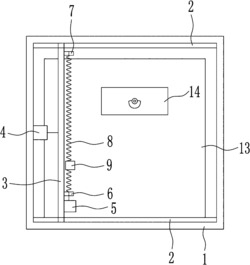
可选地,参考图2、图12,所述分合装置还可以包括收取部装008。所述收取部装008包括电机800、用于承载框架091的皮带802以及用于检测框架091位置的光电传感器801。所述电机800带动所述皮带802运动,且在所述光电传感器801检测到框架091到达指定位置时,所述电机800停止运动。所述电机800可以为步进电机或者伺服电机等。
可以理解,本说明中的滑台气缸、气缸也可以采用电动、液压传动等其他传动方式。为了示意的方便,本说明书和附图只以眼镜框示例说明。
在本说明书中提到的上与下等方位用语是相对于各附图中所示的构造进行定义的,它们是相对的概念,因此有可能会根据其所处不同位置、不同使用状态而进行相应地变化。所以,不应当将这些或者其他的方位用语解释为限制性用语。
虽然已经通过例子对本发明的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上例子仅是为了进行说明,而不是为了限制本发明的范围。本领域的技术人员应该理解,可在不脱离本发明的范围和精神的情况下,对以上实施例进行修改。本发明的范围由所附权利要求来限定。
框架与内部分体式入子的分合方法以及分合装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0