









专利摘要
本实用新型涉及金属物理研究技术领域,具体指一种变速旋转离心方法自动提取溶液中微小粒子的装置。该装置包括控制面板、控电柜、伺服电机电动推杆、支撑平台、表面皿、电磁铁、三轴直角坐标系机构、塑料软管、真空泵、密封罩、水平指示器等。通过控制面板的设置,来调节机械部分的运动模式和运动参数,承装有目标溶液的表面皿固定在支撑平台上,由伺服电机电动推杆的动作来实现表面皿内部溶液的目标运动模式,由三轴直角坐标系机构、塑料软管和真空泵协同作用来实现液体的滴入与吸出。本实用新型将数字控制系统、机械动作装置结合到一起,并集成溶液的自动加入与移取系统、电磁铁自动吸附装置,极大地简化实验过程的操作难度,提高实验的操作精度。
权利要求
1.一种变速旋转离心方法自动提取溶液中微小粒子的装置,其特征在于,其机械部分包括:伺服电机电动推杆、支撑平台、表面皿、电磁铁、三轴直角坐标系机构、塑料软管、真空泵、废液储液缸、有机溶剂储液缸、无机溶剂储液缸、密封罩、水平指示器、机械室,具体结构如下:
伺服电机电动推杆位于机械室内底部的中前部,其上依次设置支撑平台、表面皿,其下与控电柜内的伺服电机相连;在机械室外侧面,分别设置废液储液缸、有机溶剂储液缸、无机溶剂储液缸,各储液缸内部的液体与对应的塑料软管的一端接触,塑料软管另一侧连接在三轴直角坐标系机构的Z轴上,塑料软管中间与真空泵相连接,塑料软管的另一端与表面皿相对应;在机械室内中后部,设置三轴直角坐标系机构。
2.根据权利要求1所述的变速旋转离心方法自动提取溶液中微小粒子的装置,其特征在于,支撑平台和机械室底座上均设置水平指示器。
3.根据权利要求1所述的变速旋转离心方法自动提取溶液中微小粒子的装置,其特征在于,机械室的正面设置对开的密封罩。
4.根据权利要求1所述的变速旋转离心方法自动提取溶液中微小粒子的装置,其特征在于,在机械室内的三轴直角坐标系机构上设置电磁铁。
5.根据权利要求1所述的变速旋转离心方法自动提取溶液中微小粒子的装置,其特征在于,伺服电机电动推杆,其运动精度为±0.1mm,重复定位精度0.05mm,由三个伺服电机电动推杆同时运动,来实现多种旋转离心的目标动作。
6.根据权利要求1所述的变速旋转离心方法自动提取溶液中微小粒子的装置,其特征在于,与废液储液缸、有机溶剂储液缸、无机溶剂储液缸连接的塑料软管的直径1mm,与三轴直角坐标系机构Z轴连接的塑料软管前端接有可拆卸尖头端,尖头直径0.5mm。
7.根据权利要求1所述的变速旋转离心方法自动提取溶液中微小粒子的装置,其特征在于,三轴直角坐标系机构每个坐标轴的运动精度为±0.1mm,重复定位精度为0.05mm,覆盖机械室内所有空间位置;废液储液缸、有机溶剂储液缸、无机溶剂储液缸的容积为300~500ml。
8.根据权利要求1所述的变速旋转离心方法自动提取溶液中微小粒子的装置,其特征在于,还包括控制面板、控电柜,控电柜与控制面板和机械部分通过线路相连,机械部分的机械室设于控电柜之上,控制面板设于控电柜外部,在控电柜内封装控制元件、电路和真空泵。
说明书
技术领域
本实用新型涉及金属物理研究技术领域,具体指一种变速旋转离心方法自动提取溶液中微小粒子的装置,通过化学或电解等方法侵蚀掉金属基体,将金属中第二相粒子萃取至溶液中,通过变速旋转离心的方式自动分离和提纯溶液中的金属中第二相粒子(包括夹杂物、碳化物、其他微粒等)。
背景技术
钢铁材料中的第二相粒子直接影响着材料性能。因此,第二相粒子的类型、数量、尺寸、形貌和分布等是评定材料质量的重要指标。金属材料中的第二相粒子一般尺寸较小,但尺度跨度范围较大,常为纳米级、微米级甚至准毫米级。对于金属中第二相粒子的研究一般会采用二维观察的方式,包括金相显微镜、扫描电子显微镜或者透射电子显微镜,但由于二维观察受限于所选的基体观察截面,不能准确地显示粒子的三维形貌,难以反映粒子的完整信息,因此常采用侵蚀基体或无损伤地提取金属中粒子的方式,对第二相粒子进行三维形貌分析。目前主要采用化学侵蚀(酸、卤素-甲醇溶液等)和电解侵蚀两种方式来溶解金属基体,收集得到其中的第二相粒子进行观察。然而,常规过滤或淘洗的收集方式,均为全手动操作,不仅增加人力成本和时间成本,且实验结果受人为因素干扰极大,定量困难,还会造成第二相粒子中杂质含量高、第二相粒子流失严重等问题,甚至会不同程度地破坏第二相粒子的原始性状。
以钢铁材料为例,专利公告号为CN 100593706 C的中国专利“电解法提取钢中超细夹杂物的方法”、专利公告号为CN 102538703 B的中国专利“一种全尺寸提取和观察钢中非金属夹杂物三维形貌的方法”、专利公告号为CN 103060885 B的中国专利“高效提取钢中夹杂物的电解装置及方法”等,公开一种采用有机液电解的方法侵蚀钢基体的装置,通过过滤电解液的方式来分离钢中的超细夹杂物的方法。专利公告号为CN 103604687 B的中国专利“一种利用电解磁选法完整提取钢中夹杂物的方法”、申请公布号为CN 107167487 A的中国专利“一种电解提取钢中第二相粒子的集成装置及方法”等专利,公开采用有机液电解实验后,提出通过吹气淘洗或手动淘洗的方式来分离钢中的夹杂物的方法;专利公告号为CN106053175 B的中国专利“一种萃取工具钢中碳化物的简易方法”等专利,公开一种通过直接高速离心溶液的方式获得钢中碳化物粉末。题目为“Characteristics of Alumina-Based Inclusions in Low Carbon Al-Killed Steel under No-Stirring Condition”(Steel Research International,2013,84(9):878-891.)等文章中介绍采用酸等侵蚀液对基体溶解后,采用过滤或抽滤侵蚀液的方式来分离钢中夹杂物的方法。但是,无论是通过化学侵蚀方法还是电解萃取方法获得富含夹杂物或者碳化物的粉末后,后续分离处理手段均存在较大的问题。常规做法是采用抽滤或者压滤的方式来处理,采用此方法能够在滤膜上获得离散分布的夹杂物或碳化物,但存在较大的随机性,在多数视场下,阳极泥或基体颗粒与目标粒子混淆严重。因此,如何进行合理高效的夹杂物无损分离,成为目前国内外研究人员在夹杂物表征领域面临的难题。
实用新型内容
本实用新型的目的在于提供一种利用变速旋转离心方式自动提取溶液中微小粒子的装置,解决现有的化学或者电解侵蚀基体方法提取金属材料中的第二相粒子的如下技术问题:(1)难以获得大量均匀分布的夹杂物粒子;(2)难以高效去除液体中的杂质粒子;(3)难以保存全部种类的夹杂物。
为了达到上述目的,本实用新型提供的技术方案为:
一种变速旋转离心方法自动提取溶液中微小粒子的装置,其机械部分包括:伺服电机电动推杆、支撑平台、表面皿、电磁铁、三轴直角坐标系机构、塑料软管、真空泵、废液储液缸、有机溶剂储液缸、无机溶剂储液缸、密封罩、水平指示器、机械室,具体结构如下:
伺服电机电动推杆位于机械室内底部的中前部,其上依次设置支撑平台、表面皿,其下与控电柜内的伺服电机相连;在机械室外侧面,分别设置废液储液缸、有机溶剂储液缸、无机溶剂储液缸,各储液缸内部的液体与对应的塑料软管的一端接触,塑料软管另一侧连接在三轴直角坐标系机构的Z轴上,塑料软管中间与真空泵相连接,塑料软管的另一端与表面皿相对应;在机械室内中后部,设置三轴直角坐标系机构。
所述的变速旋转离心方法自动提取溶液中微小粒子的装置,支撑平台和机械室底座上均设置水平指示器。
所述的变速旋转离心方法自动提取溶液中微小粒子的装置,机械室的正面设置对开的密封罩。
所述的变速旋转离心方法自动提取溶液中微小粒子的装置,在机械室内的三轴直角坐标系机构上设置电磁铁。
所述的变速旋转离心方法自动提取溶液中微小粒子的装置,伺服电机电动推杆,其运动精度为±0.1mm,重复定位精度0.05mm,由三个伺服电机电动推杆同时运动,来实现多种旋转离心的目标动作。
所述的变速旋转离心方法自动提取溶液中微小粒子的装置,与废液储液缸、有机溶剂储液缸、无机溶剂储液缸连接的塑料软管的直径1mm,与三轴直角坐标系机构Z轴连接的塑料软管前端接有可拆卸尖头端,尖头直径0.5mm。
所述的变速旋转离心方法自动提取溶液中微小粒子的装置,三轴直角坐标系机构每个坐标轴的运动精度为±0.1mm,重复定位精度为0.05mm,覆盖机械室内所有空间位置;废液储液缸、有机溶剂储液缸、无机溶剂储液缸的容积为300~500ml。
所述的变速旋转离心方法自动提取溶液中微小粒子的装置,还包括控制面板、控电柜,控电柜与控制面板和机械部分通过线路相连,机械部分的机械室设于控电柜之上,控制面板设于控电柜外部,在控电柜内封装控制元件、电路和真空泵。
采用本实用新型提供的技术方案,与已有的公知技术相比,具有如下显著的技术效果:
1、本实用新型的一种变速旋转离心自动提取溶液中微小粒子的装置,通过对溶液中粒子进行旋转汇聚和变速离心分离,利用表面皿特殊的形状结构以及粒子碰撞聚集行为,能够将溶液中的毫米级、微米级甚至纳米级的粒子聚集到表面皿底部,并进行分别提取。从而,能够将金属中的第二相粒子完整无损失地从目标溶液中提取出来,并实现高纯度第二相粒子的均匀铺展,提高检测的准确性,采用全自动化操作来避免人为误差,应用推广性强。
2、本实用新型装置通过阶段性自动添加有机溶液和无机溶液来不断清洗含有目标粒子的溶液,可以适用于不同种类的目标溶液,并有效去除杂质粒子、去除粒子表面的残余母液。
3、本实用新型装置通过调整表面皿的运动轨迹、速度和振幅等参数,来调节表面皿内溶液的旋转状态,可以进一步提纯不同种类粒子。
4、本实用新型装置最终使溶液中微小粒子均匀铺展在表面皿底部,可供转移到检测载体直接分析,特点为纯度高、均匀铺展、粒子完整无损。
5、本实用新型装置提纯的微小粒子,可供多次实验收集,获得大量高纯微粒。
6、本实用新型采用全自动机械化操作,减少人为操作误差,保证操作精确性,并简化复杂的工艺流程,大幅度提高工作效率。
附图说明
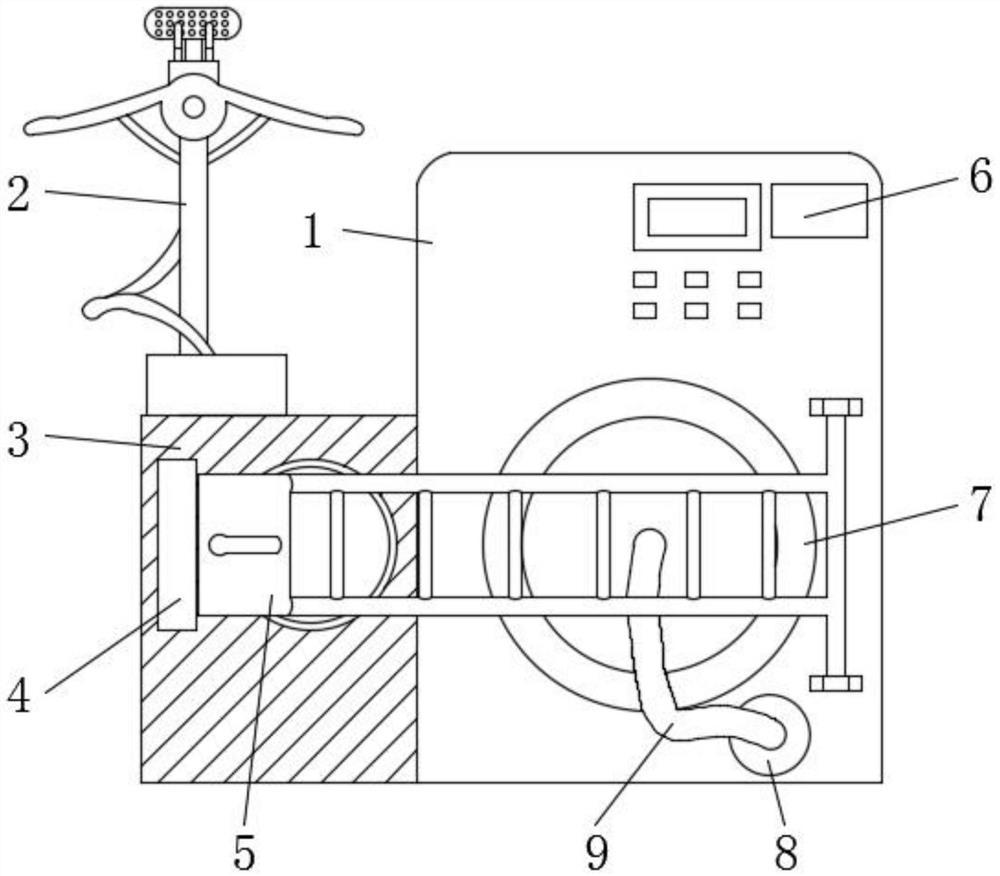
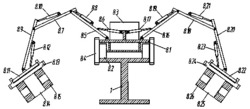
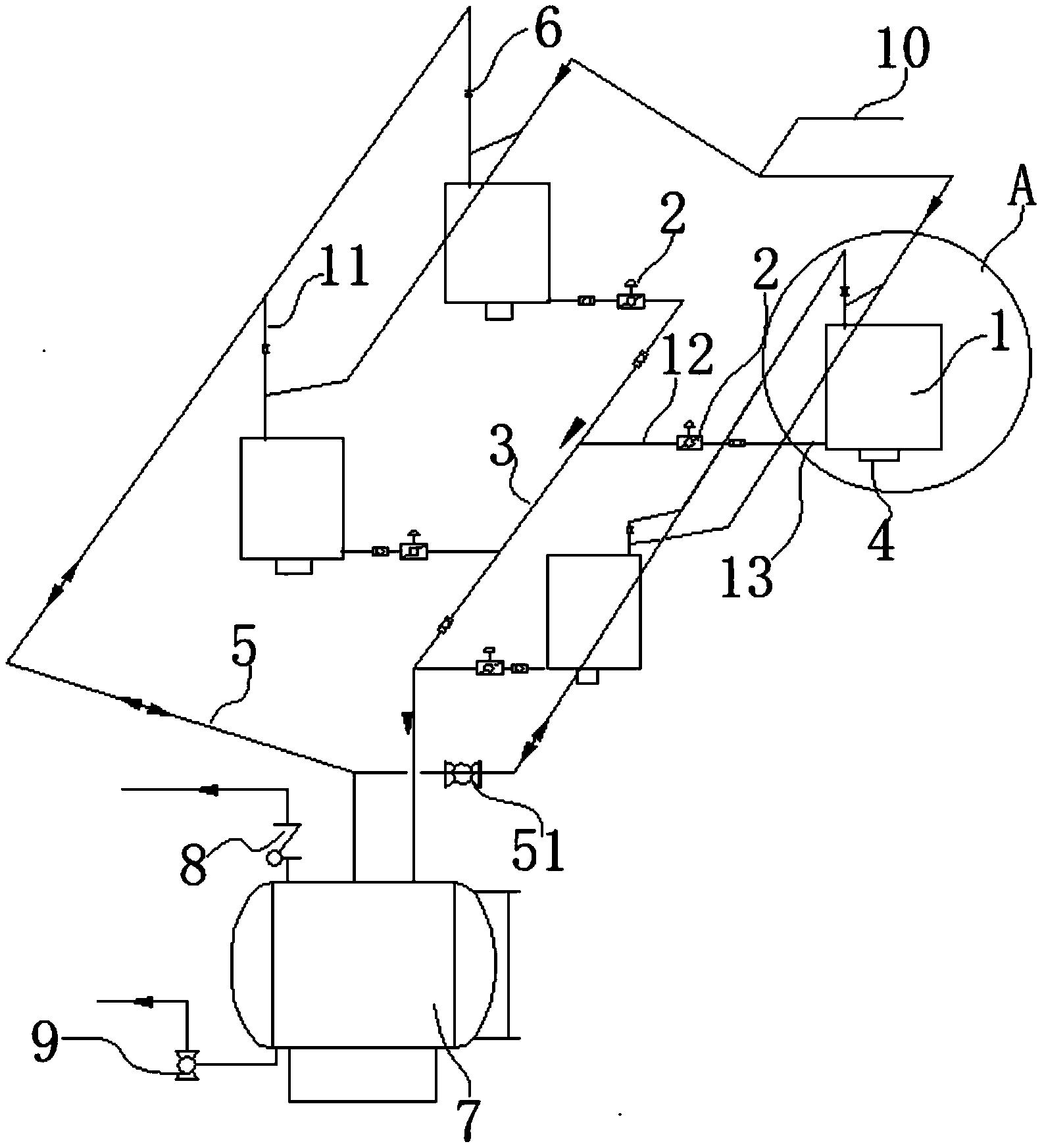
图1为本实用新型中微小粒子提取装置的主视内部结构图。
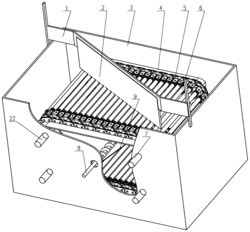
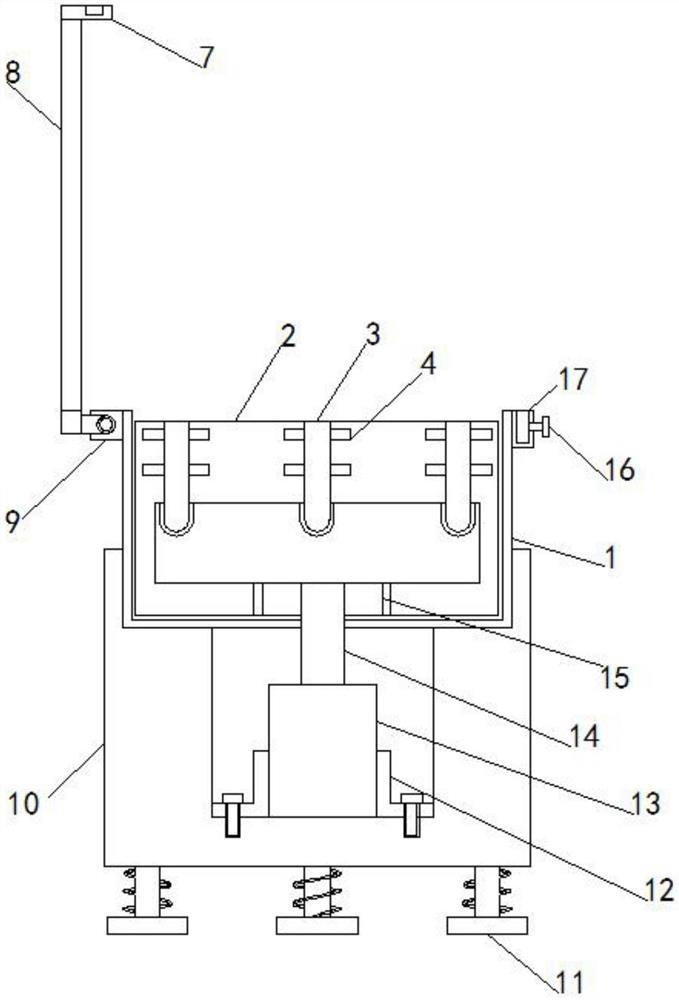
图2为本实用新型中微小粒子提取装置的俯视内部结构图。
图1-图2中:1、控制面板,2、控电柜,3、伺服电机电动推杆,4、支撑平台,5、表面皿,6、电磁铁,7、三轴直角坐标系机构,8、传感器,9、储液缸,9-1、废液储液缸,9-2、有机溶剂储液缸,9-3、无机溶剂储液缸,10、密封罩,11、水平指示器,12、机械室,13塑料软管。
具体实施方式
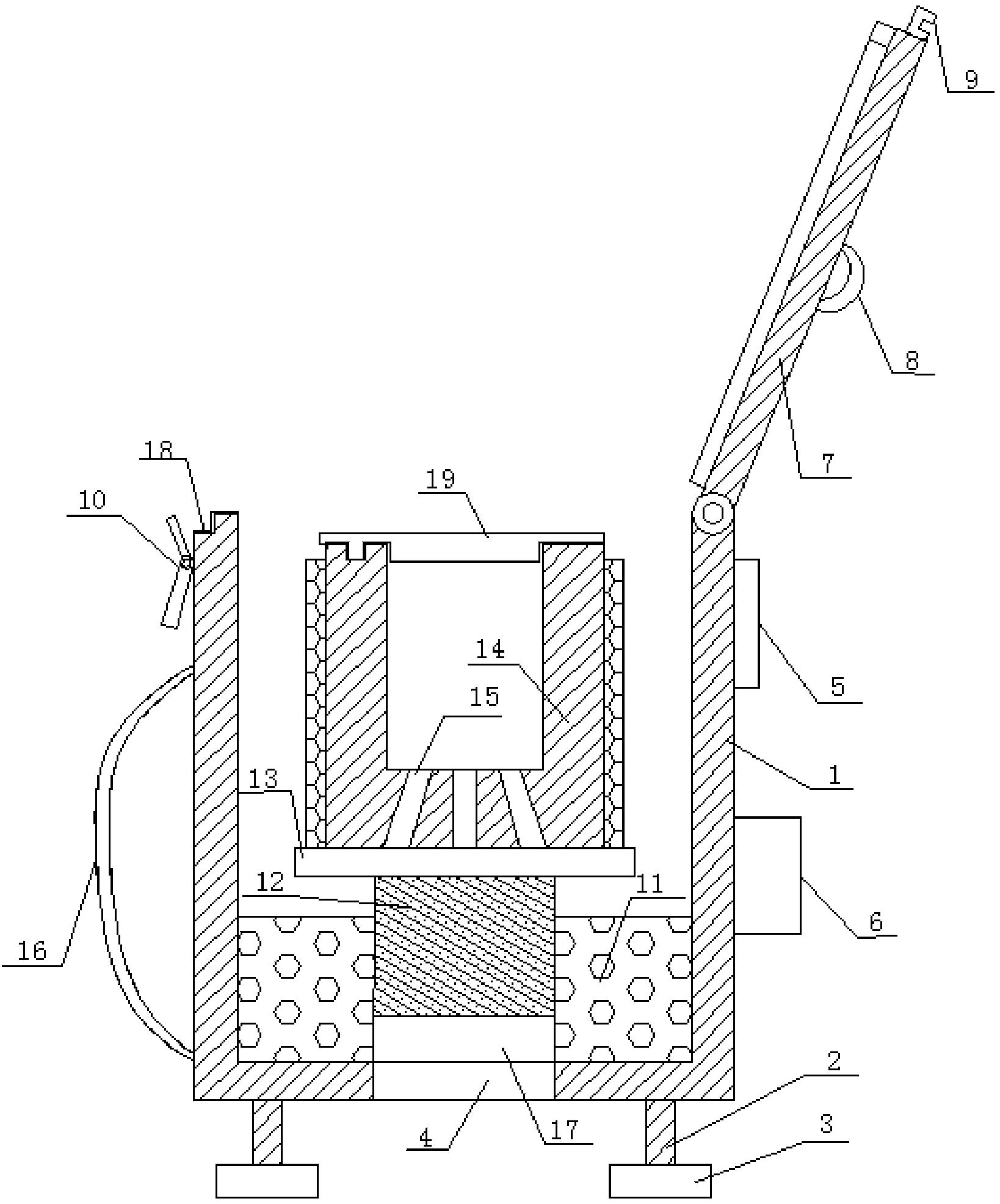
如图1-图2所示,本实用新型变速旋转离心方法自动提取溶液中微小粒子的装置,主要包括:控制面板1、控电柜2、伺服电机电动推杆3、支撑平台4、表面皿5、电磁铁6、三轴直角坐标系机构7、传感器8、储液缸9(废液储液缸9-1、有机溶剂储液缸9-2、无机溶剂储液缸9-3)、密封罩10、水平指示器11、机械室12、真空泵、塑料软管13等,具体结构如下:
控电柜2与控制面板1和机械部分通过线路相连,机械部分的机械室12设置在控电柜2顶部,控制面板1设置在控电柜2的前端,在控电柜2内封装控制元件、电路和真空泵。
机械部分设有伺服电机电动推杆3、支撑平台4、表面皿5、电磁铁6、三轴直角坐标系机构7、传感器8、储液缸9(废液储液缸9-1、有机溶剂储液缸9-2、无机溶剂储液缸9-3)、密封罩10、水平指示器11、机械室12,伺服电机电动推杆3位于机械室12内底部的中前处,其上依次设置支撑平台4、表面皿5,其下与控电柜2内的伺服电机相连,支撑平台4上设置水平指示器11。在机械室12内中后部,安装有三轴直角坐标系机构7,三轴直角坐标系机构7的运动轨迹能够覆盖机械室12内的所有空间位置,其上安装有传感器8、塑料软管13,其下与控电柜2内的伺服电机相连,塑料软管13的一端与控电柜2内真空泵的一端相连,塑料软管13的另一端与表面皿5相对应,真空泵的另一端通过塑料软管通向机械室12侧面的储液缸9。传感器8与控电柜2通过线路相连,传感器8的作用是:将信号传递至三轴直角坐标系机构7和真空泵,实现动作执行。
在机械室12侧面,分别设置废液储液缸9-1、有机溶剂储液缸9-2、无机溶剂储液缸9-3,各储液缸分别对应着各自塑料软管13。
在机械室内12的三轴直角坐标系机构7上设置电磁铁6,电磁铁6的作用是吸附溶液内的磁性颗粒。机械室12的正面设置对开的密封罩10,密封罩10的作用是保持实验空间内清洁。
使用时,通过控制面板1来调节机械部分的运动模式和运动参数,承装有目标溶液的表面皿5固定在支撑平台4上,由伺服电机电动推杆3的动作来实现表面皿5内部溶液的目标运动模式,由三轴直角坐标系机构7、塑料软管13和真空泵协同作用来实现液体的滴入与吸出。
控制面板包括两种预设运动模式:运动模式一是以表面皿最低点为转动中心点,由三个伺服电机电动推杆协同运动,实现支撑平台和表面皿做转速范围为0.5~3rad/s可调的圆周运动,旋转方向为顺时针和逆时针两个选项,振幅范围为6~10mm,振动频率与转速正相关,使表面皿中的溶液能够绕转动中心点旋转,并保证溶液不会溢出表面皿;运动模式二的转动中心点是匀速变化的,其运动轨迹在以表面皿最低点为圆心,直径范围为2~10mm可调的圆周上,转动中心点的运动速度为0.15~0.3mm/s,由三个伺服电机电动推杆协同控制,实现支撑平台和表面皿能够保持5~10°的倾斜角度做倾斜旋转运动,再叠加转速范围为0.5~3rad/s可调的圆周运动,旋转方向为顺时针和逆时针两个选项,振幅范围为6~10mm,使表面皿中的溶液能够绕转动中心的运动轨迹旋转,并保证溶液不会溢出表面皿。
本实用新型中,旋转离心提取溶液中微小粒子的方法,其步骤为:
步骤一、承装液体并校准水平
将目标溶液在烧杯中经过超声波处理2~4分钟后,将溶液倒入表面皿中,溶液的高度约为表面皿深度的1/2,再将表面皿固定在支撑平台的凹槽内,关闭密封罩;启动控电柜和控制面板,调整伺服电机电动推杆的位置,使支撑平台上的水平指示器内气泡位于正中心;
步骤二、粒子汇聚过程
设置控制面板内的运动模式与参数,保证支撑平台和表面皿做转速为0.5~3rad/s的圆周运动,振幅范围为6~10mm,该运动模式一进行4~6分钟后,停止支撑平台和表面皿的动作,并自动回归水平面,由三轴直角坐标系机构的X轴和Y轴定位,将Z轴上的塑料软管尖头端送至距离表面皿中心1/3半径长度的位置,Z轴与废液储液缸相连的塑料软管下移至接触到表面皿位置,由控制面板自动开启对应的真空泵,使塑料软管吸取表面皿内溶液到储液缸,直到液面低于废液移液管前端位置所在的水平面,再上移该塑料软管至初始位置;调整三轴直角坐标系机构Z轴与有机溶液储液缸相连的塑料软管位置在距离表面皿中心1/3半径长度的位置,并下移该塑料软管至预设位置,不要接触到表面皿内液面,由控制面板自动开启对应的真空泵,完成有机溶液预设量的加入,再上移该塑料软管至初始位置;重复本步骤的上述做法4~10次,确保溶液澄清后,调整三轴直角坐标系机构Z轴与无机溶液储液缸相连的塑料软管位置在距离表面皿中心1/3半径长度的位置,并下移该塑料软管至预设位置,不要接触到表面皿内液面,由控制面板自动开启对应的真空泵,完成无机溶液预设量的加入,再上移该塑料软管至初始位置;
步骤三、粒子分离过程
步骤二结束后,粒子汇聚到表面皿中心处,肉眼可见,溶液澄清透明,设置控制面板内的运动模式与参数,在进行步骤二的运动模式一4~6分钟后停止,再开启运动模式二,保证转动中心是匀速变化的,其运动轨迹在以表面皿最低点为圆心,直径范围为2~10mm的圆周上,转动中心点的运动速度为0.15~0.3mm/s,实现支撑平台和表面皿能够保持5~10°的倾斜角度做倾斜旋转运动,再叠加转速为0.5~3rad/s的圆周运动,振幅范围为6~10mm,该运动模式进行100~300s,使粒子分布为长条形,不同粒子按照比重分布在长条的不同位置,调整三轴直角坐标系机构将Z轴上的塑料软管尖头端送至杂质粒子所在位置,Z轴与废液储液缸相连的塑料软管下移至接触到表面皿位置,由控制面板自动开启对应的真空泵,使塑料软管缓慢地吸取表面皿内溶液和杂质粒子到储液缸,完成预设量吸取后,上移该塑料软管;调整三轴直角坐标系机构Z轴与有机溶液储液缸相连的塑料软管位置在距离表面皿中心1/3半径长度的位置,并下移该塑料软管至预设位置,不要接触到表面皿内液面,由控制面板自动开启对应的真空泵,完成有机溶液预设量的加入,再上移该塑料软管至初始位置;重复本步骤的上述做法3~5次;
步骤四、样品制备
将步骤三中的表面皿取下,在上面盖上同规格的表面皿,放置于阴凉洁净处;待表面皿内有机溶剂完全挥发后,即将表面皿内的粒子转移到导电胶或者其他载体上,进行检测分析。
步骤一中,在经过有机液电解或者酸溶的方法侵蚀掉钢基体后,获得含有第二相粒子的目标溶液;其中:电解液为三乙醇胺体积分数3~10%、丙三醇体积分数3~10%、四甲基氯化铵质量分数1~3%、其余为甲醇,电解时间6~8h,电流密度40~60mA/cm
步骤二中,如需去除溶液中的磁性颗粒,在上述操作结束后,由三轴直角坐标系机构将电磁铁送至表面皿正上方,距离表面皿上边缘4~6mm处,启动电磁铁,吸附1~2分钟后,再由三轴直角坐标系机构将电磁铁送至指定位置进行清洗。
结果表明,本实用新型通过控制面板来调节机械部分的运动模式和运动参数,承装有目标溶液的表面皿固定在支撑平台上,由伺服电机电动推杆的动作来实现表面皿内部溶液的目标运动模式,由三轴直角坐标系机构、塑料软管和真空泵协同作用来实现液体的滴入与吸出。本实用新型将数字控制系统、机械动作装置结合到一起,并集成溶液的自动加入与移取系统、电磁铁自动吸附装置,极大地简化实验过程的操作难度,提高实验的操作精度。
本实用新型不仅局限于上述实施例中的功能,对于溶液中的微小粒子,均可采用本实用新型的装置进行提取。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型所述原理的前提下,还可以做若干改进,这些改进也应视为本实用新型的保护范围。
一种变速旋转离心方法自动提取溶液中微小粒子的装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0