








专利摘要
基于标定算法和相移技术的快速、高精度低相干干涉解调方法,属于光纤传感领域,具体涉及大气压力的测量,测量方法基于低相干干涉技术,将外界大气压力的变化转换为法布里-珀罗传感器的腔长信息,当腔长引起的光程差和干涉仪扫描的光程差相匹配时在该局部区域形成明显的低相干干涉条纹。该方法首先利用改进型质心的标定算法快速地确定一个特定级次的波峰位置,然后利用对相移技术得到的该波峰对应的相对相位进行线性拟合的方法准确地获取其峰值位置。波峰的定位和峰值位置的准确获取所需要的计算量都很小,且能够保持很高的解调精度,该方法能够实现低相干干涉的快速、高精度解调。
说明书
技术领域
本发明涉及一种基于标定算法和相移技术的快速、高精度低相干干涉解调方法,属于光纤传感领域,具体涉及了外界大气压力的测量,同时适用于改变光程差的位移,振动,温度等物理量的低相干干涉解调测量。
背景技术
低相干干涉技术具有很长的发展历史,早在1665年Hook就曾提出低相干干涉条纹里的颜色信息对两个反射面之间的厚度非常敏感,可以利用低相干干涉测量厚度。虽然低相干干涉从光学基本原理上来讲并不复杂,但是由于技术水平及制造工艺的限制,直到上个世纪90年代,才有比较成熟的商业化产品出现,并广泛应用于物体三维形貌检测、薄膜厚度测量以及光纤传感等领域。
自1990年开始,低相干干涉技术得到广泛关注并获得了快速发展,人们针对低相干干涉技术的解调提出了很多解调算法来提高其解调速度和精度,从最初的通过提取条纹对比度的最大值或质心来估测零光程差位置,到后来通过提取干涉包络并利用包络的峰值位置的平移来获取干涉条纹的平移信息。也有研究人员从频域实现了干涉的解调,例如,在1995年Groot et al.提出了空间频域算法(SFDA),利用相位斜率进行解调;在1996年Larkin首次将用于激光干涉的相移技术引入到低相干干涉中,从理论分析了其可行性,并进行了计算机的模拟仿真;在2006年Sanit Kumar Debnath et al.提出了增强型的相位解调算法,通过提取出宽带光源中的单色频率成分并恢复出其绝对相位以实现解调。
其中,条纹对比度或质心算法比较简单,运算量小,但是很难实现高精度解调;如果干涉条纹的分布不发生变化,包络法能够获得较高的解调精度,但是包络的有效提取往往涉及到运算量很大的数字变换技术(例如傅立叶变换、小波变换或希尔伯特变换等),空间频域算法或增强型相位算法也需要利用傅立叶变换得到相对相位,因此,他们的运算量很大,很难实现高速解调;相比之下,相移法却能够利用较少的计算量实现较高的解调精度。人们提出了很多相移补偿算法(比如五步、七步、八步法等)以适应于低相干干涉,但是,仅仅利用相移技术得到的相对相位是不能实现解调的,还需要一个特定的波峰或波谷(一般为中心波峰或0级波峰)以恢复出绝对相位,目前,未见有报道简单、稳定、可靠的波峰确定方法。
发明内容
本发明的目的是解决现有解调方法很难在运算量较小的条件下,实现高精度解调的问题,提供一种基于标定算法和相移技术的快速、高精度低相干干涉解调方法。该方法利用改进型质心的标定算法来定位一个特定级次的波峰,然后通过相移法得到该波峰对应的相对相位,并进行线性拟合来精确地获得其峰值位置,以实现低相干干涉的快速、高精度解调。
本发明提供的基于标定算法和相移技术的快速、高精度低相干干涉解调方法,首先需要定位一个特定级次的波峰位置,然后准确地获取该波峰的峰值位置,通过获取波峰峰值位置的平移以得到干涉条纹的整体平移信息,实现解调,具体实现步骤为:
第1、特定级次波峰位置的确定,波峰级次一般选择为中心波峰或0级波峰,其他级次的波峰位置,分别通过在0级波峰位置的基准上加上或减去相应个波长距离得到:
第1.1、进行标定实验,建立干涉条纹的质心位置和准确的特定级次的波峰峰值位置的对应关系,并进行三次多项式拟合,得到拟合表达式;
第1.2、解调时,将质心带入通过标定实验得到的拟合表达式,得到该特定级次波峰的估测位置x,估测位置x所在的波峰即为需要确定的特定级次的波峰;
第2、已确定的特定级次波峰峰值位置的准确获取:
第2.1、利用七步相移公式得到干涉条纹的相对相位φ(n):
其中,I(n)为实际采集的光强,n为采集的序列号,m为一个波长λ的干涉条纹对应的采集点数;
第2.2、上面的相移公式得到的相位φ(n)∈(-π/2,π/2),通过下面的公式进行相位展开得到 使展开后相位
其中,K(n)为干涉条纹的对比度:K(n)=I(n)-I(n+m);
第2.3、对已经确定的特定级次波峰对应的相对相位 进行最小二乘线性拟合,拟合直线纵坐标为零的点为波峰峰值点,其横坐标即为波峰峰值点位置。
其中,第1步中干涉条纹的质心位置获取方法是:
1)对采集的离散干涉信号提取对比度K(n);
2)对比度K(n)取绝对值得到K'(n),n同样为采集序列号,即K′(n)=|K(n)|;
3)对K'(n)设置一个阈值 以提取出最有效的信息K'(j),j为K′(n)的幅值大于设定阈值 对应的采集序列号,其中 K′max为K′(n)的最大值;
4)对提取出的干涉条纹运用质心公式得到质心横坐标 第1步中准确的特定级次波峰峰值位置的获取方法是:压强以一定的压强间隔单调增大时,干涉条纹会发生单调平移,利用递归比较的方法可以依次确定特定级次的波峰位置,其中一定的压强间隔的需满足压强变化引起的波峰峰值位置的平移量不大于干涉条纹的波长λ,才能保证递归比较法的有效性。然后再利用上述第2步中的方法准确地获取其峰值位置。
本发明的有益效果及优点在于:
1、通过利用改进型的质心进行标定的方法能够简单、快速、准确地定位一个特定级次的波峰峰值位置;
2、利用相移法获得相对相位,运算量小、相位精度较高;
3、通过对中心波峰对应的相对相位进行线性拟合能够精确地获取波峰的峰值位置,相对于多项式拟合和高斯拟合确定法,该方法具有很强的抗噪声干扰能力和抗畸变能力,即使在信噪比很低的环境下或者波形严重畸变的条件下,也能较准确地获取波峰的峰值位置,提高峰值位置的定位精度;
4、特定级次波峰位置的确定和峰值位置的准确获取的运算量都非常小,能够实现低相干干涉的快速解调,相比于基于傅立叶变换技术的解调方法,该方法能够提高大约25倍的解调速度;
5、不仅中心波峰或0级波峰能用于解调,其他±1级波峰、±1级波谷也同样适用于解调;
附图说明
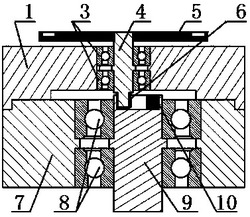
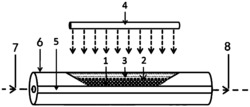
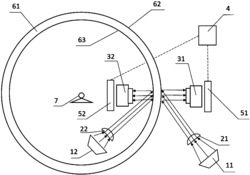
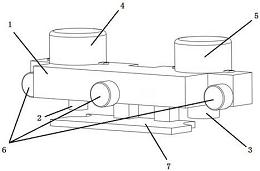
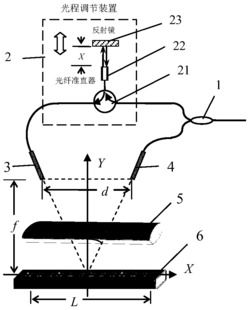
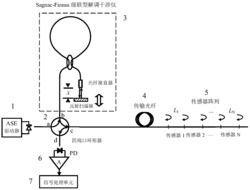
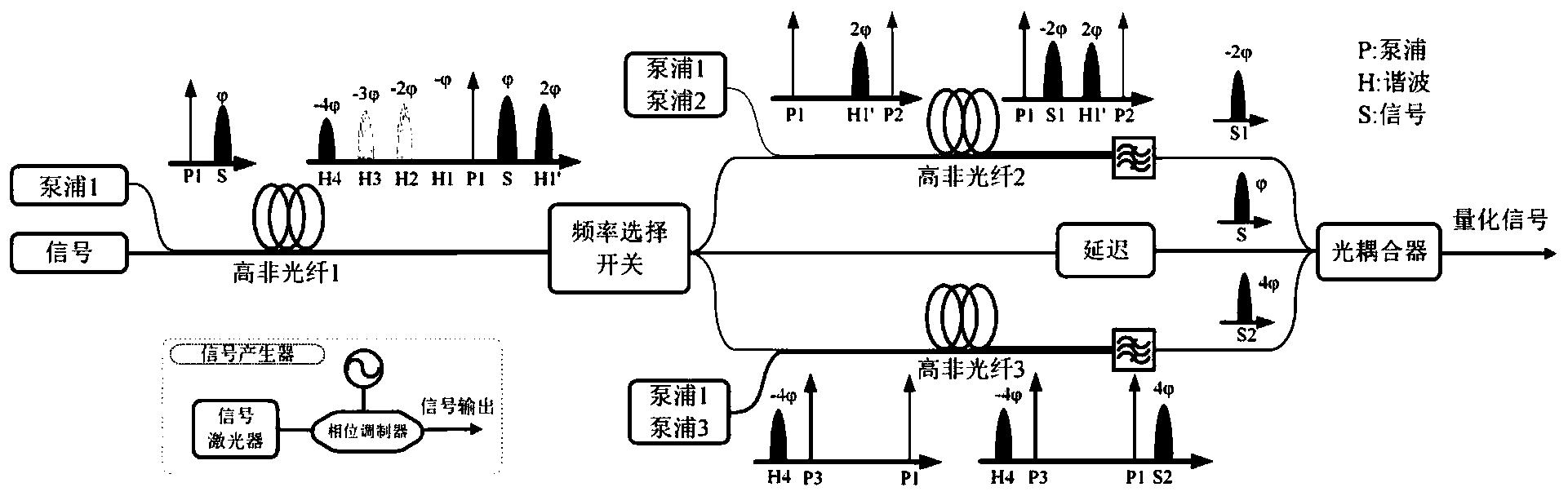
图1为空间扫描型低相干干涉光纤传感大气压力解调装置示意图;
图2为改进型质心算法解释图及结果,其中(a)为原始干涉条纹,(b)为干涉对比条纹,(c)干涉对比度的绝对值条纹;(d)为得到的压强-质心位置特性曲线;
图3为通过递归比较法获得中心波峰峰值位置的方法解释图及结果,其中(a)为递归比较法解释图;(b)为得到的压强-准确的中心波峰峰值位置特性曲线;
图4为本发明方法用于确定中心波峰的可行性验证图,其中(a)为局部放大的干涉条纹图,(b)为实际得到的估测误差曲线图;
图5为相位展开说明图及波峰峰值位置获取的说明图;
图6为利用本方法得到的压强-0,±1级波峰峰值位置特性曲线和利用0级波峰得到的解调误差,其中(a)为压强-波峰峰值位置特性曲线,(b)为0级波峰解调误差曲线。
具体实施方式
实施例
实验装置
附图1为一种基于低相干干涉原理搭建的解调装置,用于测量外界大气压力,本发明方法将结合大气压力的实际测量进行说明,具体参见附图2-附图6。
宽带光源1发出的光,经耦合器2入射到光纤法布里-珀罗(F-P)传感器3,入射光在传感器3中发生近似双光束干涉,光程差为F-P腔长的两倍,被传感器3调制的光经耦合器2出射,然后依次经过准直透镜4和双折射光楔5,并最终入射到电荷耦合元件CCD6,当双折射光楔5引起的光程差和传感器3引起的光程差相匹配时,在该局部区域产生明显的低相干干涉条纹。
实验中需要的大气压强通过高精度、高稳定压力源产生,该压力源可以达到0.01kPa的控制精度。
具体解调方法
第1、特定级次波峰位置的确定,这里我们以中心波峰的确定为例进行说明,其他级次的波峰也同样可以通过下面的方法得到:
第1.1、进行标定实验,建立质心和准确的中心波峰峰值位置的对应关系,并进行三次多项式拟合,得到拟合表达式。
在标定实验中,控制压强以2kPa为间隔从80kPa单调递增到220kPa,压强改变时间间隔为5分钟。
其中,利用改进型质心算法获得质心位置的具体方法为:首先对采集的干涉信号利用公式K(n)=I(n)-I(n+m/2)提取对比度,I(n)为光强,m为一个波长对应的采集点数,实际采集的干涉条纹的波长为52采集点即m=52,图2(a)所示为180akPa下采集的原始干涉信号,图2(b)为提取的对比度条纹。然后对提取的对比度取绝对值并设置阈值,阈值 图2(c)为对比度的绝对值和阈值设置示意图,阈值以上的对比度是提取的最有效的条纹,通过阈值提取的有效条纹对应的采集点数为j,然后对提取的这部分条纹运用质心公式得到质心横坐标 在每个设定压强下都可以经过上述步骤得到质心横坐标,图2(d)为经过上面的方法得到的压强-质心位置曲线。
准确的中心波峰峰值位置获取方法是:大气压强以2kPa的压强间隔单调增大时,干涉条纹会发生单调平移,利用递归比较的方法可以依次确定中心波峰位置:在本解调装置中,随着压强的单调递增,干涉条纹在CCD中会单调左移,那么以起始压强80kPa下干涉条纹的中心波峰或0级波峰位置为基准位置(其中准确的中心波峰的峰值位置通过后面将要提到的对该中心波峰的相对相位进行线性拟合的方法得到),压强增大到82kPa时,由于2kPa的压强间隔引起的干涉条纹的平移量小于干涉波长λ,因此可以直接确定大于基准位置的波峰位置即为82kPa下的中心波峰,同样利用对相对相位进行线性拟合的方法准确确定其峰值位置,重新定义82kPa下确定的准确的中心波峰峰值位置为基准位置,当压强继续以2kPa间隔单调增大时,以上述同样的方法继续准确地确定中心波峰位置,如此循环往复,便能顺序确定各个压强下的准确的中心波峰峰值位置,便得到图3(b)压强-中心波峰峰值位置曲线。
如此,便通过中间变量压强,建立了质心和准确的中心波峰峰值的对应关系,为了提高运算效率和拟合效果,先对质心位置除以100然后再与准确的中心波峰峰值位置进行三次多项式拟合,得到表达式:y=-120.45551+106.84972x-0.14573x2+0.00278x3。
第2、已确定的特定级次波峰峰值位置的准确获取(解调):
解调时,将质心带入通过标定实验得到的拟合表达式,得到该中心波峰的估测位置,估测位置所在的波峰即为所需要确定的中心波峰。
第1步,中心波峰峰值位置的准确获取,具体步骤为:首先利用七步相移公式得到干涉条纹的相对相位φ(n):
图4(a)所示为利用上面的七步相移公式得到的局部相对相位φ(n)和对比度条纹K(n)。第2步,通过下面的公式进行相位展开得到 使展开后相位
图4(b)所示为利用上面的相位展开公式得到的中心波峰对比度条纹和相应的展开后的相对相位 可以看出中心波峰对应的相对相位呈现单调递增趋势,这与理论是相符的。
第3步,对得到的中心波峰的相对相位进行线性拟合,拟合直线为零的点就对应着中心波峰的峰值位置,具体见图4(b),这样便准确地获得了中心波峰的峰值位置。
图5所示为本发明专利中提出的标定算法的可行性验证图,其中图5(a)为实际采集的干涉条纹的局部方法图,可以看出,干涉条纹的波长λ大约为52个CCD像素间隔,如果通过拟合表达式估测的中心波峰位置和实际的中心波峰峰值位置相差小于U2,也就是26个CCD像素,或者估测的中心波峰位置落在图5(a)中的阴影区域,那么我们就可以准确地定位中心波峰峰值位置。图5(b)为实际得到的估测误差曲线,其中最大估测误差大约为11个CCD像素间隔,远小于26个像素间隔,因此能够准确地定位中心波峰。
在解调实验中,控制压强以2kPa为间隔从79kPa单调递增到219kPa,压强改变时间间隔为5分钟。+1级和-1级波峰位置分别可以通过中心波峰也就是0级波峰估测位置加上λ和减去λ得到。也就是说,只要0级波峰能够准确定位,其他级次的波峰或波谷都可以通过0级波峰的估测位置相应地得到。同样我们也可以利用相位线性拟合的方法准确地得到他们的峰值点。图6所示为采用本发明方法得到的压强-0级和±1级波峰峰值位置关系曲线和利用0级波峰进行解调得到的解调误差,从图6(a)可以看出,三条曲线都保持很好的线性度,而且没有出现波峰的误判现象(如果存在波峰误判,在曲线中会有跳跃点出现,跳跃间隔大约为一个波长也就是52个CCD像素间隔),从图6(b)可以看出最大解调误差仅为0.05kPa,换算成F-P传感器的腔长的话,大约为2nm,解调精度很高。从计算量上分析,利用傅立叶变换提取包络进行的解调方法大约需要40350次的加法运算、19500次的乘法运算和512次的开放运算(只处理一帧干涉信号中最有效的512个离散点的干涉条纹)。本发明方法处理同样处理512点的干涉信号,只需要大约3900次的加法运算和770次的乘法运算。由于乘法运算消耗的计算时间较长,因此从乘法运算量上分析,本发明方法的运算量能够节约大约25倍,能够实现快速解调的要求。
基于标定算法和相移技术的快速、高精度低相干干涉解调方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0