

IPC分类号 : A47L1/02,G01D5/00,G01D5/26,H04M1/725





专利摘要
本实用新型公开了一种基于STM32单片机的家用智能窗户清洁机器人,包括机器人,所述机器人的顶部上侧设有电源线接口,所述机器人的顶部中间位置处设有排气口,所述机器人的底部四个边角处均设有车轮,所述机器人的底部中间位置出设有风机安装槽,所述机器人顶部设有握把,所述机器人的侧面设有红外感应模块安装孔,所述机器人的底部上下两侧对称设有清洁抹布安装区域,所述机器人的底部中间设有风机进气孔,所述机器人的内部设有风机,所述风机的右上侧设有红外感应模块,所述风机的右下侧设有直流减速电机,所述风机的底部设有印刷电路板,所述机器人的底壳中间位置设有风机固定板。本实用新型可自动化清洁窗户,取代人工操作,智能化程度高,实用性强。
权利要求
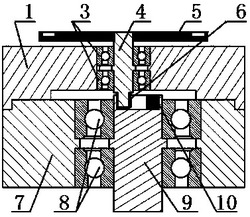
1.一种基于STM32单片机的家用智能窗户清洁机器人,包括机器人,其特征在于:所述机器人的顶部上侧设有电源线接口(1),所述机器人的顶部中间位置处设有排气口(2),所述机器人的底部四个边角处均设有车轮(3),所述机器人的底部中间位置出设有风机安装槽(4),所述机器人顶部设有握把(5),所述机器人的侧面设有红外感应模块安装孔(6),所述机器人的底部上下两侧对称设有清洁抹布安装区域(7),所述机器人的底部中间设有风机进气孔(8),所述机器人的内部设有风机(9),所述风机(9)的右上侧设有红外感应模块(10),所述风机(9)的右下侧设有直流减速电机(11),所述风机(9)的底部设有印刷电路板(12),所述机器人的底壳中间位置设有风机固定板(13),所述风机固定板(13)的顶部设有红外模块安装支柱(14),所述风机固定板(13)的右下侧设有印刷电路板安装支柱(15),所述风机固定板(13)的底部设有接触感应模块安装孔(16)。
2.根据权利要求1所述的一种基于STM32单片机的家用智能窗户清洁机器人,其特征在于:所述机器人设有智能控制系统,所述智能控制系统包括STM32单片机、接触感应模块、海拔高度传感器、红外感应模块、蓝牙模块、印刷电路板,所述STM32单片机、接触感应模块、海拔高度传感器、红外感应模块、蓝牙模块、印刷电路板均相互连通。
3.根据权利要求1所述的一种基于STM32单片机的家用智能窗户清洁机器人,其特征在于:所述机器人设有两种工作模式,包括自动模式和手动模式;所述的自动模式为:机器人通过接触感应模块、海拔高度传感器、红外感应模块获取周围环境的信息,规划行进路线,继而根据一定的规律完成对窗户的清洁;所述的手动模式为:用户通过智能手机的蓝牙功能连接至所述的机器人,操控机器人向指定方向移动。
4.根据权利要求1所述的一种基于STM32单片机的家用智能窗户清洁机器人,其特征在于:所述风机设为大风量低噪音的无刷直流风机,额定工作电压为24伏特。
5.根据权利要求1所述的一种基于STM32单片机的家用智能窗户清洁机器人,其特征在于:所述接触感应模块安装于机器人的底部,用于检测机器人是否紧贴窗户,若检测到机器人脱离窗户则向智能控制系统发送警报信号。
6.根据权利要求3所述的一种基于STM32单片机的家用智能窗户清洁机器人,其特征在于:所述海拔高度传感器采用已校准的精度在0.1米以上的高度传感器,所述海拔高度传感器可向智能控制系统传输数据,用于确定机器人的初始高度和工作时所在的高度,通过智能算法使机器人完成工作后返回到初始位置。
7.根据权利要求1所述的一种基于STM32单片机的家用智能窗户清洁机器人,其特征在于:所述的红外感应模块以固定频率向外发射红外光,若接收到反射回来的红外光即表示遇到障碍,向智能控制系统发送遇障信号。
8.根据权利要求2所述的一种基于STM32单片机的家用智能窗户清洁机器人,其特征在于:所述蓝牙模块用于系统与智能手机进行连接通讯,手机可向机器人发出控制指令,使机器人向指定的方向移动。
说明书
技术领域
本实用新型涉及智能机器人设备技术领域,具体为一种基于STM32单片机的家用智能窗户清洁机器人。
背景技术
随着人民生活水平的提高,健康舒适的家居环境成为越来越多人的需求。许多家庭的玻璃窗户外侧容易沾染灰尘且难以清洁,影响了居家环境的美观,也影响了室内的光线,长时间在光照不良的环境中生活会对眼睛有不良影响,并且高层的窗户外部清洁较为危险,针对以上所述,那么如何实用新型出一种基于STM32单片机的家用智能窗户清洁机器人,这成为我们需要解决的问题。
发明内容
本实用新型的目的在于提供一种基于STM32单片机的家用智能窗户清洁机器人,解决了背景技术中所提出的问题。
为解决上述问题,本实用新型提供如下技术方案:一种基于STM32单片机的家用智能窗户清洁机器人,包括机器人,所述机器人的顶部上侧设有电源线接口,所述机器人的顶部中间位置处设有排气口,所述机器人的底部四个边角处均设有车轮,所述机器人的底部中间位置出设有风机安装槽,所述机器人顶部设有握把,所述机器人的侧面设有红外感应模块安装孔,所述机器人的底部上下两侧对称设有清洁抹布安装区域,所述机器人的底部中间设有风机进气孔,所述机器人的内部设有风机,所述风机的右上侧设有红外感应模块,所述风机的右下侧设有直流减速电机,所述风机的底部设有印刷电路板,所述机器人的底壳中间位置设有风机固定板,所述风机固定板的顶部设有红外模块安装支柱,所述风机固定板的右下侧设有印刷电路板安装支柱,所述风机固定板的底部设有接触感应模块安装孔。
作为本实用新型的进一步优选方式,所述机器人设有智能控制系统,所述智能控制系统包括STM32单片机、接触感应模块、海拔高度传感器、红外感应模块、蓝牙模块、印刷电路板,所述STM32单片机、接触感应模块、海拔高度传感器、红外感应模块、蓝牙模块、印刷电路板均相互连通。
作为本实用新型的进一步优选方式,所述机器人设有两种工作模式,包括自动模式和手动模式。所述的自动模式为:机器人通过接触感应模块、海拔高度传感器、红外感应模块获取周围环境的信息,规划行进路线,继而根据一定的规律完成对窗户的清洁;所述的手动模式为:用户通过智能手机的蓝牙功能连接至所述的机器人,操控机器人向指定方向移动。
作为本实用新型的进一步优选方式,所述STM32单片机设为系统的控制核心,采用32位的的STM32最小系统模块,所述STM32最小系统模块焊接于印刷电路板的中部,其他模块焊接在印刷电路板上或通过导线连接至印刷电路板。
作为本实用新型的进一步优选方式,所述风机设为大风量低噪音的无刷直流风机,额定工作电压为24伏特。
作为本实用新型的进一步优选方式,所述接触感应模块安装于机器人的底部,用于检测机器人是否紧贴窗户,若检测到机器人脱离窗户则向智能控制系统发送警报信号。
作为本实用新型的进一步优选方式,所述海拔高度传感器采用已校准的精度在0.1米以上的高度传感器,所述海拔高度传感器可向智能控制系统传输数据,用于确定机器人的初始高度和工作时所在的高度,通过智能算法使机器人完成工作后返回到初始位置。
作为本实用新型的进一步优选方式,所述的红外感应模块以固定频率向外发射红外光,若接收到反射回来的红外光即表示遇到障碍,向智能控制系统发送遇障信号。
作为本实用新型的进一步优选方式,所述蓝牙模块用于系统与智能手机进行连接通讯,手机可向机器人发出控制指令,使机器人向指定的方向移动。
与现有技术相比,本实用新型的有益效果如下:
本实用新型通过利用真空吸附技术使其吸附于玻璃窗户表面,利用电机控制技术使其在窗户上移动,该机器人底部装有清洁抹布,在移动过程中完成对窗户的清洁,与人手持抹布擦拭窗户的效果相仿,便于高层建筑外部玻璃清洁,使用更加安全值得推广。
附图说明
图1为本实用新型的智能控制系统主板电路原理结构示意图;
图2为本实用新型机器人俯视结构示意图;
图3为本实用新型机器人侧视结构示意;
图4为本实用新型机器人底部仰视结构示意;
图5为本实用新型机器人内部结构示意;
图6为本实用新型机器人底壳结构示意。
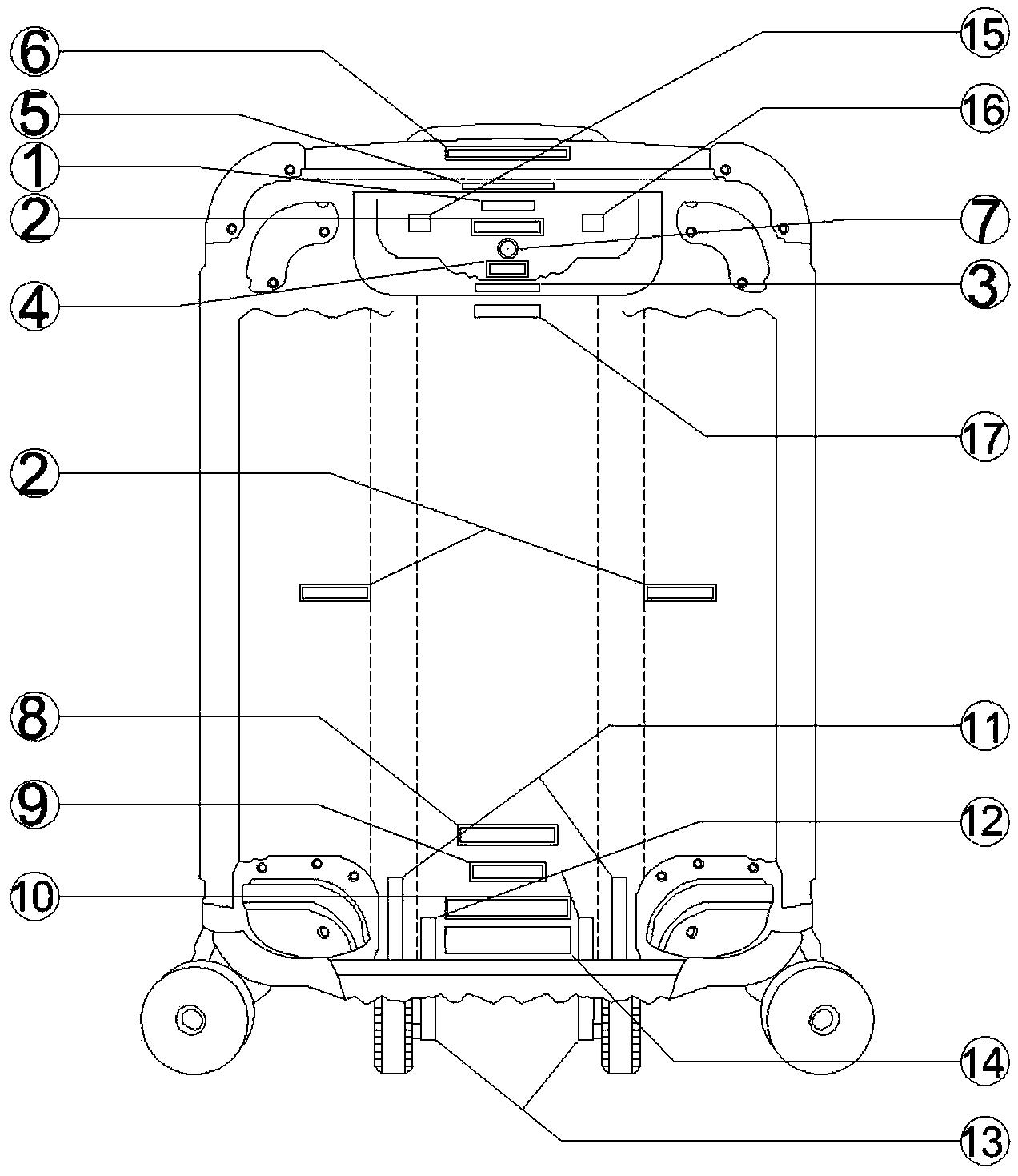
图中:1-电源线接口,2-排气口,3-车轮,4-风机安装凸槽,5-握把,6-红外感应模块安装孔,7-清洁抹布安装区域,8-风机进气孔,9-风机,10-红外感应模块,11-直流减速电机,12-印刷电路板,13-风机的固定板,14-红外模块安装支柱,15-印刷电路板安装支柱,16-接触感应模块安装孔位。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
请参阅图1-6,本实用实用新型提供一种技术方案:一种基于STM32单片机的家用智能窗户清洁机器人,包括机器人,所述机器人的顶部上侧设有电源线接口1,所述机器人的顶部中间位置处设有排气口2,所述机器人的底部四个边角处均设有车轮3,所述机器人的底部中间位置出设有风机安装槽4,所述机器人顶部设有握把5,所述机器人的侧面设有红外感应模块安装孔6,所述机器人的底部上下两侧对称设有清洁抹布安装区域7,所述机器人的底部中间设有风机进气孔8,所述机器人的内部设有风机9,所述风机9的右上侧设有红外感应模块10,所述风机9的右下侧设有直流减速电机11,所述风机9的底部设有印刷电路板12,所述机器人的底壳中间位置设有风机固定板13,所述风机固定板13的顶部设有红外模块安装支柱14,所述风机固定板13的右下侧设有印刷电路板安装支柱15,所述风机固定板13的底部设有接触感应模块安装孔16。
所述机器人设有智能控制系统,所述智能控制系统包括STM32单片机、接触感应模块、海拔高度传感器、红外感应模块、蓝牙模块、印刷电路板,所述STM32单片机、接触感应模块、海拔高度传感器、红外感应模块、蓝牙模块、印刷电路板均相互连通。
所述机器人设有两种工作模式,包括自动模式和手动模式。所述的自动模式为:机器人通过接触感应模块、海拔高度传感器、红外感应模块获取周围环境的信息,规划行进路线,继而根据一定的规律完成对窗户的清洁;所述的手动模式为:用户通过智能手机的蓝牙功能连接至所述的机器人,操控机器人向指定方向移动。
所述STM32单片机设为系统的控制核心,采用32位的的STM32最小系统模块,所述STM32最小系统模块焊接于印刷电路板的中部,其他模块焊接在印刷电路板上或通过导线连接至印刷电路板。
所述风机设为大风量低噪音的无刷直流风机,额定工作电压为24伏特。
所述接触感应模块安装于机器人的底部,用于检测机器人是否紧贴窗户,若检测到机器人脱离窗户则向智能控制系统发送警报信号。
所述海拔高度传感器采用已校准的精度在0.1米以上的高度传感器,所述海拔高度传感器可向智能控制系统传输数据,用于确定机器人的初始高度和工作时所在的高度,通过智能算法使机器人完成工作后返回到初始位置。
所述的红外感应模块以固定频率向外发射红外光,若接收到反射回来的红外光即表示遇到障碍,向智能控制系统发送遇障信号。
所述蓝牙模块用于系统与智能手机进行连接通讯,手机可向机器人发出控制指令,使机器人向指定的方向移动。
工作原理:机器人启动时能够抽取底部的空气,使底部接近真空状态,通过大气压力的作用使整体吸附在玻璃窗户上。所述的智能窗户清洁机器人搭载接触感应模块、红外感应模块以及海拔高度传感器对所处环境的信息进行准确采集,将采集到的数据送到控制核心STM32单片机,由控制核心对数据进行分析处理后给出控制信号,智能窗户清洁机器人搭载两个轮子,分别由两个电机驱动,电机连接至控制核心,由控制核心输出控制信号使电机转动,以此使机器人移动,并且搭载蓝牙模块,能够通过蓝牙连接到用户的智能手机,用户可通过手机控制机器人的移动。
以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
一种基于STM32单片机的家用智能窗户清洁机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


















动态评分
0.0