








专利摘要
本发明公开了一种擦窗机器人,包括:圆柱形的机体,所述机体底部的中心位置设有行走装置及能够使得机体吸附在玻璃上的负压发生器,所述负压发生器设于行走装置外周,在负压发生器外设有可转动的转动盘,转动盘的底部均匀设有5~8个独立的清洁单元,所述机体设于位于负压发生器上方的蓄电池,行走装置、负压发生器、转动盘及清洁单元均与蓄电池连接。本发明的目的在于提供一种擦窗机器人,这种擦窗机器人能够便于对楼外玻璃进行清洁。
权利要求
1.一种擦窗机器人,包括:圆柱形的机体(1),其特征在于,所述机体(1)底部的中心位置设有行走装置(2)及能够使得机体吸附在玻璃上的负压发生器(3),所述负压发生器(3)设于行走装置(2)外周,在负压发生器(3)外设有可转动的转动盘(6),转动盘(6)上安装有机体(1),转动盘(6)的底部均匀设有5~8个独立的清洁单元(4),所述机体(1)内设有位于负压发生器(3)上方的蓄电池(5),行走装置(2)、负压发生器(3)、转动盘(6)及清洁单元(4)均与蓄电池(5)连接。
2.根据权利要求1所述的擦窗机器人,其特征在于,所述行走装置(2)包括一个单叉臂(203)、一个行走轮(201)以及转动轴与行走轮(201)配合安装的第一电机(202),所述第一电机(202)的机壳固定安装在单叉臂(203)纵轴的下部,单叉臂(203)上部的横轴上安装有驱动单叉臂(203)转向的第二电机(204),所述第二电机(204)的机壳固定安装在机体(1)内。
3.根据权利要求1所述的擦窗机器人,其特征在于,所述清洁单元(4)包括截面为正方形的第一转体(401)及截面为圆形的第二转体(402),第一转体(401)及第二转体(402)均为柱形,所述第一转体(401)及第二转体(402)均配合安装有驱动其转动的伺服电机,所述转动盘(6)底部设有用于安装清洁单元(4)的凹槽(601);第二转体(402)通过可拆卸的第一伸缩杆(404)安装在凹槽(601)内侧,第一转体(401)通过第二伸缩杆(405)安装在凹槽(601)的槽口位置且伸出凹槽0.5~1cm,所述第一转体(401)及第二转体(402)分别从清洁布条(403)的两端开始裹清洁布条,并将清洁布条裹紧。
4.根据权利要求1所述的擦窗机器人,其特征在于,所述负压发生器(3)包括一端开口的罩体(301),行走装置安装在罩体(301)内,所述罩体(301)的顶部设有将罩体(301)内气体抽出罩体的负压机(302),机体(1)的顶部设有与负压机(302)排气端连接的排气口。
5.根据权利要求1所述的擦窗机器人,其特征在于,所述转动盘(6)外圆柱面上设有齿条(601),所述机体(1)内设有第三电机(602),所述第三电机(602)的转轴上设有与齿条(601)配合的齿轮(603),齿条(601)与齿轮(603)配合安装。
6.根据权利要求3所述的擦窗机器人,其特征在于,所述凹槽(601)内还设有用于将清洁布条(403)卡住使得清洁布条能够裹紧在第一转体(401)上的卡紧器(406)。
7.根据权利要求3所述的擦窗机器人,其特征在于,所述机体(1)内设有储水器(7),所述储水器(7)通过喷射泵连有喷头(8),喷射泵与喷头(8)之间设有流量计(9),所述喷头(8)设于凹槽(601)内,且朝向裹在第一转体(401)上的清洁布条(403)。
8.根据权利要求4所述的擦窗机器人,其特征在于,所述蓄电池(5)外设有外壳(501),所述外壳(501)的底部设有进风口(502),顶部设有排风口(503),所述进风口(502)与负压机的排气端连接,排风口(503)与机体(1)的顶部排气口连接。
9.根据权利要求3所述的擦窗机器人,其特征在于,所述第二伸缩杆(405)安装在第一伸缩杆(404)上。
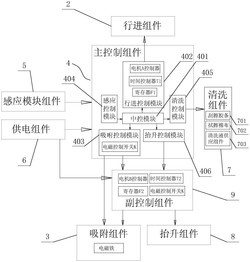
10.根据权利要求1-9之一所述的擦窗机器人的控制方法,其特征在于,使用擦窗机器人时,将清洁布条(403)安装第一转体(401)及第二转体(402)上,所述第一电机(202)、第二电机(204)、负压发生器(3)的负压机(302)、第一转体(401)及第二转体(402)均配合安装的伺服电机、第一伸缩杆(404)、第二伸缩杆(405)、第三电机(602)、喷头(8)连接喷射泵、流量计(9)及卡紧器(406)分别与控制模块连接,控制的具体步骤为:
a、打开擦窗机器人开关,控制模块控制负压发生器(3)启动,控制第二伸缩杆(405)的伸缩使得第一转体(401)处于设定的擦窗位置,控制喷射泵工作,使得喷头(8)向第一转体(401)上的清洁布条(403)喷洒设定量的水,设定量的水通过流量计获知,再控制第一转体(401)转动,使得被喷湿的清洁布条(403)位于第一转体(401)的清洁面上,再控制卡紧器(406)将清洁布条(403)卡紧;
b、控制模块控制第三电机(602)工作,使得转动盘(6)转动,从而使得安装在在转动盘上的清洁单元对玻璃进行清洁;
c、在通过清洁单元对玻璃清洁的同时,控制模块控制第一电机(202)及第二电机(204)工作,从而使得擦窗机器人在玻璃上行走;
d、当清洁单元(4)清洁了设定时间或设定面积的玻璃后,控制第二伸缩杆(405)收缩设定距离,同时控制第三电机(602)停止工作,控制模块控制卡紧器(406)松开清洁布条,控制控制喷射泵工作,使得喷头(8)对第一转体(401)上的清洁布条(403)湿润,再控制第一转体(401)转动,使得被喷湿的清洁布条(403)位于第一转体(401)的清洁面上,再控制卡紧器(406)将清洁布条(403)卡紧,控制第二伸缩杆(405)伸长,使得第一转体(401)位于设定的擦窗位置,控制第三电机(602)工作,继续擦窗。
说明书
技术领域
本发明属于机器人技术领域,具体地说,涉及一种擦窗机器人。
背景技术
城市发展越来越快,不管是住宅还是办公楼在玻璃的使用上越来越多,然而,窗户玻璃的清洁却不是一件容易的事情。特别是很多办公楼,一年可能只清洁一次,清洁时,需要有清洁工人在楼外清洁,具有一定的危险性。而住宅的窗户同样难以清洁,并且请楼外清洁工费用昂贵,因此需要一种清洁机器人,能够便于对窗户玻璃进行清洁。
发明内容
本发明的目的在于提供一种擦窗机器人,这种擦窗机器人能够便于对楼外玻璃进行清洁。
为解决上述技术问题,本发明采用技术方案的基本构思是:
本擦窗机器人,包括:圆柱形的机体,所述机体底部的中心位置设有行走装置及能够使得机体吸附在玻璃上的负压发生器,所述负压发生器设于行走装置外周,在负压发生器外设有可转动的转动盘,转动盘的底部均匀设有5~8个独立的清洁单元,所述机体内设有位于负压发生器上方的蓄电池,行走装置、负压发生器、转动盘及清洁单元均与蓄电池连接。
进一步地,所述行走装置包括一个单叉臂、一个行走轮以及转动轴与行走轮配合安装的第一电机,所述第一电机的机壳固定安装在单叉臂纵轴的下部,单叉臂上部的横轴上安装有驱动单叉臂转向的第二电机,所述第二电机的机壳固定安装在机体内。
进一步地,所述清洁单元包括截面为正方形的第一转体及截面为圆形的第二转体,所述第一转体及第二转体均配合安装有驱动器转动的伺服电机,所述转动盘底部设有用于安装清洁单元的凹槽;第二转体通过可拆卸的第一伸缩杆安装在凹槽内侧,第一转体通过第二伸缩杆安装在凹槽的槽口位置且伸出凹槽0.5~1cm,所述第一转体及第二转体分别从清洁布条的两端开始裹清洁布条,并将清洁布条裹紧。
进一步地,所述负压发生器包括一端开口的罩体,行走装置安装在罩体内,所述罩体的顶部设有将罩体内气体抽出罩体的负压机,机体的顶部设有与负压机排气端连接的排气口。
进一步地,所述转动盘外圆柱面上设有齿条,所述机体内设有第三电机,所述第三电机的转轴上设有与齿条配合的齿轮,齿条与齿轮配合安装。
进一步地,所述凹槽内还设有用于将清洁布条卡住使得清洁布条能够裹紧在第一转体上的卡紧器。
进一步地,所述机体内设有储水器,所述储水器通过喷射泵连有喷头,喷射泵与喷头之间设有流量计,所述喷头设于凹槽内,且朝向裹在第一转体上的清洁布条。
进一步地,所述蓄电池外设有外壳,所述外壳的底部设有进风口,顶部设有排风口,所述进风口与负压机的排气端连接,排风口与机体的顶部排气口连接。
进一步地,所述第二伸缩杆安装在第一伸缩杆上。
该擦窗机器人的控制方法,,使用擦窗机器人时,将清洁布条安装第一转体及第二转体上,所述第一电机、第二电机、负压发生器的负压机、第一转体及第二转体均配合安装的伺服电机、第一伸缩杆、第二伸缩杆、第三电机、喷头连接喷射泵、流量计及卡紧器分别与控制模块连接,控制的具体步骤为:
a、打开擦窗机器人开关,控制模块控制负压发生器启动,控制第二伸缩杆的伸缩使得第一转体处于设定的擦窗位置,控制喷射泵工作,使得喷头向第一转体上的清洁布条喷洒设定量的水,设定量的水通过流量计获知,再控制第一转体转动,使得被喷湿的清洁布条位于第一转体的清洁面上,再控制卡紧器将清洁布条卡紧;
b、控制模块控制第三电机工作,使得转动盘转动,从而使得安装在在转动盘上的清洁单元对玻璃进行清洁;
c、在通过清洁单元对玻璃清洁的同时,控制模块控制第一电机及第二电机工作,从而使得擦窗机器人在玻璃上行走;
d、当清洁单元清洁了设定时间或设定面积的玻璃后,控制第二伸缩杆收缩设定距离,同时控制第三电机停止工作,控制模块控制卡紧器松开清洁布条,控制控制喷射泵工作,使得喷头对第一转体上的清洁布条湿润,再控制第一转体转动,使得被喷湿的清洁布条位于第一转体的清洁面上,再控制卡紧器将清洁布条卡紧,控制第二伸缩杆伸长,使得第一转体位于设定的擦窗位置,控制第三电机工作,继续擦窗。
采用上述技术方案后,本发明与现有技术相比具有以下有益效果:
1、设有的行走装置能够驱动机器人的行走,负压发生器能够使得机器人吸附在窗户玻璃上,而在转动盘底部设有的5~8个独立的清洁单元能够对玻璃进行清洁,使得清洁的效果更好;
2、行走装置设为单轮式行走装置,且其支撑臂设为单叉臂式,从而能够有效降低机器人的整体重量,避免现有的两轮或三轮式的机器人结构复杂,重量重的弊端,能够降低200-300g左右的重量,且能够不增加机器人体积的情况下,能够使得机器人的清洁的面积增加,有效利用空间增加;
3、通过将第一转体设为截面为正方形的柱体,第一转体每转动90°就能够使得第一转体带动清洁布条移动,使得第一转体的另一面成为对玻璃的清洁面,将脏的清洁布条面更换;
4、负压发生器的罩体设于行走装置外,能够减少负压发生器的体积,增加空间利用率,且负压发生器排出的气体经过蓄电池,蓄电池工作会放出热量,能够对蓄电池进行降温;
5、通过设有的储水器,喷射泵能够将水抽送至喷头,从而对清洁布条进行湿润,从而能够将窗户擦拭得更加干净。
下面结合附图对本发明的具体实施方式作进一步详细的描述。
附图说明
附图作为本申请的一部分,用来提供对本发明的进一步的理解,本发明的示意性实施例及其说明用于解释本发明,但不构成对本发明的不当限定。显然,下面描述中的附图仅仅是一些实施例,对于本领域普通技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图。在附图中:
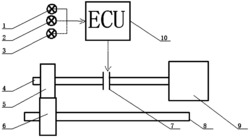
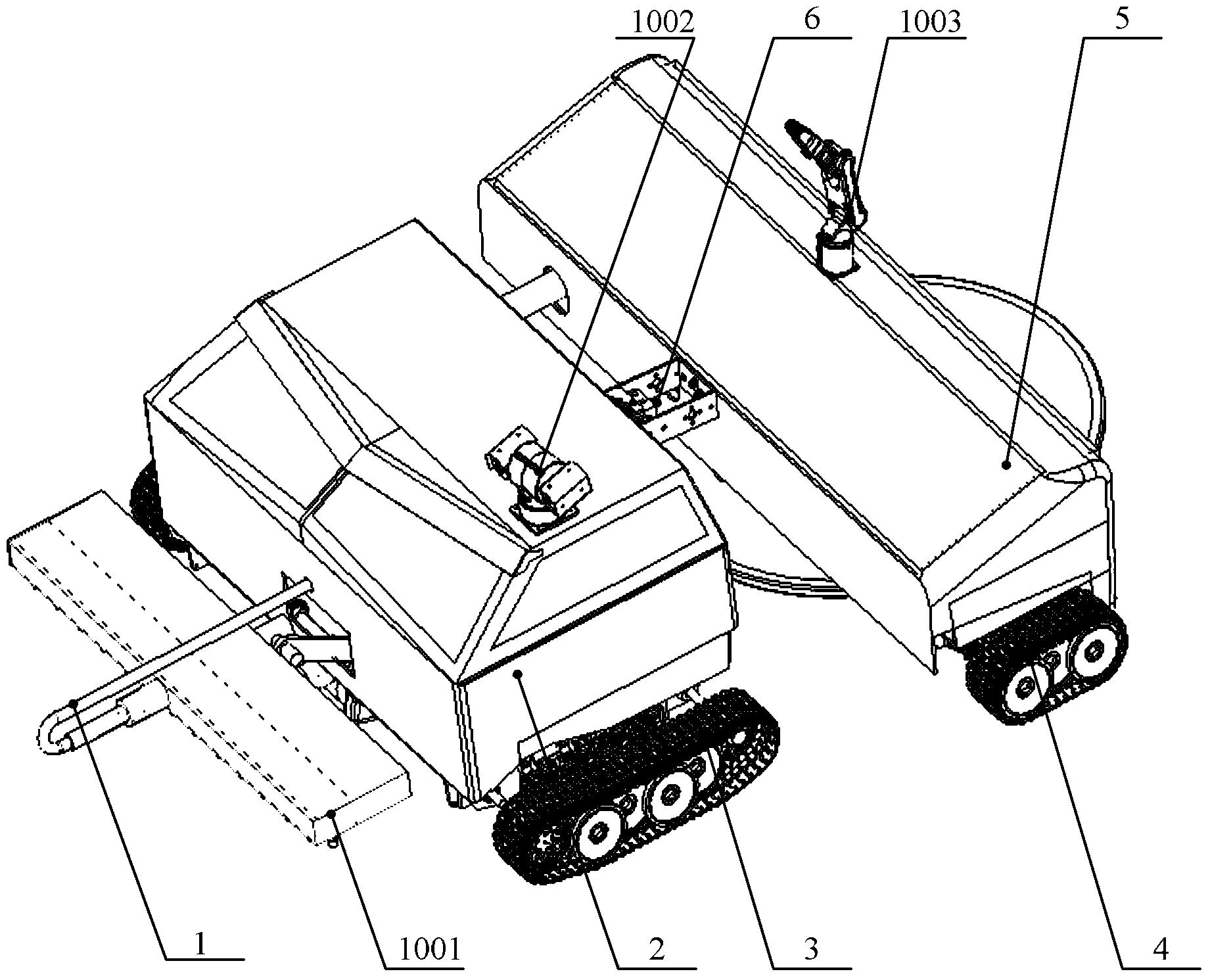
图1为擦窗机器人的总体结构示意图;
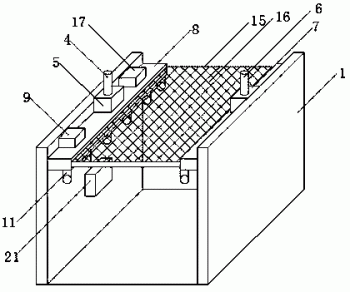
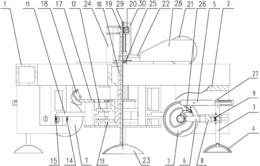
图2为转动盘的仰视图;
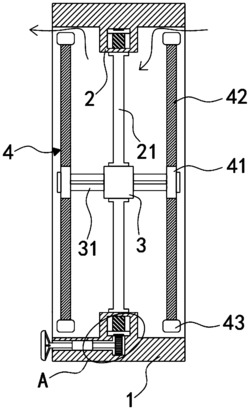
图3为清洁单元安装在转动盘凹槽中的结构示意图。
需要说明的是,这些附图和文字描述并不旨在以任何方式限制本发明的构思范围,而是通过参考特定实施例为本领域技术人员说明本发明的概念。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对实施例中的技术方案进行清楚、完整地描述,以下实施例用于说明本发明,但不用来限制本发明的范围。
在本发明的描述中,需要说明的是,术语 “上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例一:
如图1至图3所示的擦窗机器人,包括:圆柱形的机体1,所述机体1底部的中心位置设有行走装置2及能够使得机体吸附在玻璃上的负压发生器3,所述负压发生器3设于行走装置2外周,在负压发生器3外设有可转动的转动盘6,转动盘6上安装有机体1,转动盘6的底部均匀设有5~8个独立的清洁单元4,所述机体1内设有位于负压发生器3上方的蓄电池5,行走装置2、负压发生器3、转动盘6及清洁单元4均与蓄电池5连接,转动盘与蓄电池连接是指转动盘的驱动装置与蓄电池连接。转动盘6的转动带动清洁单元4旋转,从而使得清洁单元4对玻璃进行清洁。
所述行走装置2包括一个单叉臂203、一个行走轮201以及转动轴与行走轮201配合安装的第一电机202,所述第一电机202的机壳固定安装在单叉臂203纵轴的下部,单叉臂203上部的横轴上安装有驱动单叉臂203转向的第二电机204,所述第二电机204的机壳固定安装在机体1内。
所述清洁单元4包括截面为正方形的第一转体401及截面为圆形的第二转体402,第一转体401及第二转体402为柱形,所述第一转体401及第二转体402均配合安装有驱动器转动的伺服电机,所述转动盘6底部设有用于安装清洁单元4的凹槽601;第二转体402通过可拆卸的第一伸缩杆404安装在凹槽601内侧,第一转体401通过第二伸缩杆405安装在凹槽601的槽口位置且伸出凹槽0.5~1cm,所述第一转体401及第二转体402分别从清洁布条403的两端开始裹清洁布条,并将清洁布条裹紧,所述第二伸缩杆405安装在第一伸缩杆404上。
所述负压发生器3包括一端开口的罩体301,行走装置安装在罩体301内,所述罩体301的顶部设有将罩体301内气体抽出罩体的负压机302,机体1的顶部设有与负压机302排气端连接的排气口。
所述转动盘6外圆柱面上设有齿条601,所述机体1内设有第三电机602,所述第三电机602的转轴上设有与齿条601配合的齿轮603,齿条601与齿轮603配合安装。
所述凹槽601内还设有用于将清洁布条403卡住使得清洁布条能够裹紧在第一转体401上的卡紧器406。
所述机体1内设有储水器7,所述储水器7通过喷射泵连有喷头8,喷头8布置为沿第一转体401轴向布置为一排,喷射泵与喷头8之间设有流量计9,所述喷头8设于凹槽601内,且朝向裹在第一转体401上的清洁布条403。
所述蓄电池5外设有外壳501,所述外壳501的底部设有进风口502,顶部设有排风口503,所述进风口502与负压机的排气端连接,排风口503与机体1的顶部排气口(未示出)连接。
擦窗机器人的控制方法,使用擦窗机器人时,将清洁布条403安装第一转体401及第二转体402上,所述第一电机202、第二电机204、负压发生器3的负压机302、第一转体401及第二转体402均配合安装的伺服电机、第一伸缩杆404、第二伸缩杆405、第三电机602、喷头8连接喷射泵、流量计9及卡紧器406分别与控制模块连接,控制的具体步骤为:
a、打开擦窗机器人开关,控制模块控制负压发生器3启动,控制第二伸缩杆405的伸缩使得第一转体401处于设定的擦窗位置,控制喷射泵工作,使得喷头8向第一转体401上的清洁布条403喷洒设定量的水,设定量的水通过流量计获知,再控制第一转体401转动,使得被喷湿的清洁布条403位于第一转体401的清洁面上,再控制卡紧器406将清洁布条403卡紧;第一转体401的清洁面为第一转体与窗户玻璃的接触侧的面。
b、控制模块控制第三电机602工作,使得转动盘6转动,使得转动盘6转动,从而使得安装在在转动盘上的清洁单元对玻璃进行清洁;
c、在通过清洁单元对玻璃清洁的同时,控制模块控制第一电机202及第二电机204工作,从而使得擦窗机器人在玻璃上行走及改变方向,这种单轮的行走装置结构简单,体积小;
d、当清洁单元4清洁了设定时间或设定面积的玻璃后,控制第二伸缩杆405收缩设定距离,同时控制第三电机602停止工作,控制模块控制卡紧器406松开清洁布条,控制控制喷射泵工作,使得喷头8对第一转体401上的清洁布条403湿润,再控制第一转体401转动,使得被喷湿的清洁布条403位于第一转体401的清洁面上,再控制卡紧器406将清洁布条403卡紧,控制第二伸缩杆405伸长,使得第一转体401位于设定的擦窗位置,设定的擦窗位置可能不同,根据第一转体401上包裹清洁布条的厚度来调整第二伸缩杆405伸长量或根据第一转体401与玻璃的压力大小调整第二伸缩杆405伸长量,控制第三电机602工作,继续擦窗;循环d步骤,将窗户擦干净后,关掉擦窗机器人,并取下机器人。
以上所述仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专利的技术人员在不脱离本发明技术方案范围内,当可利用上述提示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明方案的范围内。
一种擦窗机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0